1º Derivación Parcial y Diferencial
1º Derivación Parcial y Diferencial
1º Derivación Parcial y Diferencial

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Capítulo 1<br />
Derivadas parciales y<br />
diferencial<br />
Con este tema iniciamos el cálculo diferencial en varias variables, cuyo ob-<br />
jetivo es el estudio de las propiedades de variación de las funciones reales de<br />
varias variables reales. Aunque con algunas complicaciones técnicas propias<br />
del cálculo de varias variables, en buena medida se seguirá un camino paralelo<br />
al seguido en el desarrollo del cálculo de una variable. Repasaremos breve-<br />
mente los conceptos de límite y continuidad de funciones y seguidamente<br />
abordaremos los conceptos de derivada parcial y diferencial. Para facilitar el<br />
aprendizaje, desarrollaremos el tema para el caso de funciones de dos vari-<br />
ables reales, aunque todas las nociones que consideraremos son válidas para<br />
funciones de cualquier número de variables. Por ello, cuando sea conveniente,<br />
al final de cada tema mencionaremos brevemente el caso de funciones de tres<br />
variables considerando algún ejemplo adecuado.<br />
1.1. Funciones de dos variables.<br />
En las ciencias experimentales, cuando se estudia un determinado fenó-<br />
meno, se da a menudo el caso de que éste quede completamente descrito me-<br />
diante una ley que establece una relación funcional entre varias magnitudes<br />
1
fundamentales. Así, por ejemplo, la ley que establece para los gases perfectos<br />
que, si P , V y T son la presión, el volumen y la temperatura absoluta de 1<br />
mol de un tal gas, se verifica la relación<br />
P V = RT,<br />
donde R es cierta constante (recibe el nombre de ecuación de estado). Si<br />
despejamos P en la igualdad anterior, resulta P = RT/V . La expresión an-<br />
terior nos dice que la presión P es función de T y V y, por tanto, queda<br />
completamente determinada cuando conocemos T y V . Si mediante algún<br />
procedimiento hacemos que V y T sean cada vez más próximos a cero, ¿ha-<br />
cia qué valor se acerca la presión P ?, ¿cómo podemos determinar un valor<br />
aproximado del incremento de la presión en función de los incrementos (pe-<br />
queños) ∆V y ∆T ? Entre otras cuestiones, en este tema veremos cómo es la<br />
respuesta a estas preguntas.<br />
Una función de dos variables f es una regla o ley que asocia a cada<br />
par (x, y), perteneciente a cierto conjunto D ⊂ R 2 , un único número real<br />
f(x, y). D recibe el nombre de dominio de la función y x e y son las variables<br />
independientes. Es usual usar z para designar a la imagen f(x, y) y se dirá<br />
que z es la variable dependiente. Una función queda determinada cuando<br />
damos la ecuación z = f(x, y) y el dominio D donde se mueve el par (x, y).<br />
A veces, sólo se da la ecuación z = f(x, y), en cuyo caso se entiende que<br />
el dominio es todo el campo de existencia, es decir, el conjunto formado por<br />
todos los pares (x, y) para los que la ecuación en cuestión permite obtener la<br />
correspondiente imagen.<br />
Ejemplos 1.1.1. a) f(x, y) = log(x 2 + y 2 ) es una función cuyo dominio es<br />
todo R 2 menos el origen (0, 0).<br />
b) f(x, y) = √ x · y tiene por dominio la parte del plano que consta de los<br />
cuadrantes primero y tercero, pues sólo tienen imagen los puntos (x, y) con<br />
coordenadas de igual signo: D = {(x, y) ∈ R 2 : x ≥ 0, y ≥ 0} ∪ {(x, y) ∈ R 2 :<br />
x ≤ 0, y ≤ 0}.<br />
2
Las funciones de dos variables pueden representarse gráficamente en el<br />
espacio de la siguiente forma: Dada f : D ⊂ R 2 → R, escogemos un sistema<br />
de coordenadas cartesianas OXYZ en el espacio y en el plano OXY represen-<br />
tamos el dominio D. Para cada (x, y) ∈ D, dibujamos en el espacio el punto<br />
de coordenadas (x, y, f(x, y)). El conjunto formado por todos los puntos de<br />
la forma (x, y, f(x, y)), con (x, y) ∈ D, es una superficie. Se dirá que es la<br />
representación gráfica de la función f o que la superficie tiene por ecuación<br />
z = f(x, y).<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
0<br />
1<br />
2<br />
Eje OY<br />
3<br />
4<br />
4<br />
3<br />
2<br />
Eje =X<br />
Ejemplos 1.1.2. a) f(x, y) = ax + by tiene por representación gráfica un<br />
plano.<br />
b) f(x, y) = x 2 + y 2 tiene por representación gráfica un paraboloide de<br />
revolución con vértice el punto (0, 0, 0).<br />
3<br />
1<br />
0
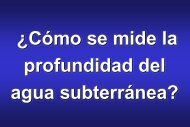
c) f(x, y) = x 2 tiene por gráfica otro tipo de paraboloide (cilíndrico).<br />
En muchos casos, puede ayudar a la visualización de una función de dos<br />
variables el conocer la forma que tienen las curvas de nivel. Dada f : D ⊂<br />
R 2 → R, la curva de nivel que pasa por (x0, y0) ∈ D es el conjunto de<br />
puntos (x, y) ∈ D tales que f(x, y) = f(x0, y0). Se trata, pues, de una curva<br />
que pasa por el punto (x0, y0) y que se caracteriza porque f tiene un valor<br />
constante a lo largo de ella. La familia de todas las curvas de nivel tiene por<br />
ecuación f(x, y) = c, donde c es una constante arbitraria. La curva de nivel<br />
f(x, y) = c es la proyección sobre el plano OXY de la curva C que determina<br />
el plano z = c al cortar a la superficie de ecuación z = f(x, y). En la figura<br />
siguiente puede verse como cada punto (x, y, c) de esta curva (en rojo) se<br />
proyecta en el punto (x, y, 0) de la curva de nivel f(x, y) = c (en negro).<br />
−1<br />
−0.5<br />
0<br />
0.5<br />
Eje OY<br />
1<br />
1.5<br />
4<br />
Eje OZ<br />
2<br />
2<br />
1.5<br />
z=c<br />
1<br />
C<br />
curva de nivel f(x,y)=c<br />
0.5<br />
0<br />
Eje OX<br />
−0.5<br />
−1<br />
−1.5<br />
−2
Es decir, las coordenadas de ambos puntos sólo se diferencian en la co-<br />
ordenada z que es igual a 0 en la curva de nivel e igual a c en la curva<br />
intersección C.<br />
Estas ideas nos pueden ayudar a la hora de representar gráficamente una<br />
función.<br />
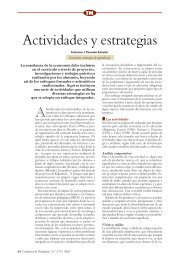
Ejemplos 1.1.3. a) z = x 2 + y 2 . Al cortar la superficie con los planos de la<br />
forma z = c (c ≥ 0) resulta una curva plana C cuyas ecuaciones son<br />
z = c<br />
x 2 + y 2 = c<br />
(1.1)<br />
La curva de nivel x 2 + y 2 = c no es otra cosa que la circunferencia de centro<br />
el origen y radio √ c en el plano OXY. La curva C tiene la forma de esta<br />
misma circunferencia, pero colocada en el plano z = 0. Cuando c = 0 el corte<br />
se reduce a un punto: (0, 0, 0). En los demás casos, se trata de circunferencias<br />
cuyos radios √ c aumentan con c (ver la figura siguiente).<br />
5
Intuimos que la superficie puede ser un paraboloide o un cono de vértice el<br />
origen. Finalmente, podemos cortar la superficie con el plano y = 0 y resulta<br />
una curva en el plano OXZ que tiene por ecuación z = x 2 . Esto nos confirma<br />
que se trata de un paraboloide.<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−2<br />
−1<br />
b) f(x, y) = x 2 + y 2 .<br />
0<br />
Eje OX<br />
1<br />
2<br />
Eje OZ<br />
2<br />
1<br />
Eje OY<br />
0<br />
Las curvas de nivel son las circunferencias con centro el origen x 2 + y 2 =<br />
c 2 . Como en el ejemplo anterior, al cortar la superficie con un plano de<br />
la forma z = c (c > 0) se obtiene una circunferencia con centro en el eje<br />
OZ y radio c cuya proyección sobre el plano z = 0 es la curva de nivel<br />
x 2 + y 2 = c 2 . Al aumentar c, el plano z = c cada vez se aleja más de<br />
z = 0 y la circunferencia interceptada tiene mayor radio, como en el ejemplo<br />
anterior.<br />
La diferencia ahora radica en que al cortar la superficie con el plano y = 0,<br />
resulta z = |x| que es la ecuación de un par de rectas en el plano OXZ. Por<br />
tanto, la superficie es un cono de revolución con vértice (0, 0, 0) y eje OZ.<br />
6<br />
−1<br />
−2
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−2<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
−4<br />
−1<br />
−2<br />
0<br />
0<br />
Eje OX<br />
2<br />
Eje OZ<br />
Gráfica de z = x 2<br />
Eje OX<br />
1<br />
Eje OZ<br />
7<br />
2<br />
4<br />
4<br />
3<br />
Eje OY<br />
0<br />
2<br />
2<br />
Eje OY<br />
−2<br />
0<br />
−4<br />
−2
c) Si T (x, y) representa la temperatura en cada punto (x, y) de cierta<br />
región D del plano, entonces las curvas de nivel T (x, y) = c son las isotermas<br />
(curvas de temperatura constante).<br />
Para una función de más de dos variables no es posible una representación<br />
gráfica, pero puede ser muy útil conocer qué forma tienen las superficies de<br />
nivel. Si f : D ⊂ R 3 → R es una función de tres variables, se llaman<br />
superficies de nivel a las que tienen por ecuación f(x, y, z) = c.<br />
Ejemplos 1.1.4. a) Si V (x, y, z) es el potencial eléctrico creado en el espacio<br />
por una determinada distribución de cargas eléctricas, las superficies de nivel<br />
son las superficies equipotenciales.<br />
b) Si f(x, y, z) = x 2 + y 2 + z 2 , las superficies de nivel son superficies<br />
esféricas de centro el origen.<br />
1.2. Superficies<br />
Algunas superficies, que nos encontraremos en las aplicaciones, no se ob-<br />
tienen como representación gráfica de una función de dos variables; es decir,<br />
no responden a una ecuación de la forma z = f(x, y). Basta pensar en una<br />
superficie cilíndrica de eje OZ y radio R. Nótese que, si (x0, y0) es un pun-<br />
to de la circunferencia x 2 + y 2 = R 2 , los puntos de coordenadas (x0, y0, z)<br />
(al variar z) describen la generatriz que pasa por (x0, y0, 0). Por tanto, todos<br />
pertenecen a la superficie. Por ello, es imposible que una ecuación de la forma<br />
z = f(x, y) pueda describir la superficie en cuestión (fijado (x0, y0), sólo el<br />
punto (x0, y0, f(x0, y0)) pertenece a la superficie de ecuación z = f(x, y)). Su-<br />
perficies como la anterior se describen matemáticamente mediante ecuaciones<br />
de la forma f(x, y, z) = 0. Más precisamente, adoptaremos la siguiente defini-<br />
ción. El lugar geométrico de los puntos del espacio que verifican la ecuación<br />
f(x, y, z) = 0<br />
8
es ( en general) una superficie S, pues se trata de un conjunto de puntos<br />
con dos grados de libertad. En efecto, pueden escogerse los valores de x e y<br />
libremente y el valor de z queda determinado por la ecuación. Ésta recibe el<br />
nombre de ecuación implícita de la superficie.<br />
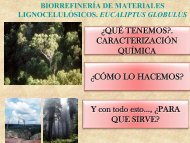
Terminamos el apartado deduciendo de forma razonada la ecuación de<br />
una superficie cilíndrica. Denotemos por S la superficie cilíndrica de eje OZ<br />
y radio R. Vamos a probar que su ecuación en forma implícita es x 2 +y 2 = R 2 .<br />
−1<br />
−0.5<br />
0<br />
Eje OX<br />
0.5<br />
Eje OZ<br />
1<br />
Con la ayuda de la figura, vemos que, si (x0, y0, z0) es un punto cualquiera<br />
de la superficie S, su proyección sobre el plano z = 0 es el punto (x0, y0, 0), que<br />
pertenece a la circunferencia C de centro el origen, radio R y contenida en el<br />
plano OXY. Esta circunferencia tiene por ecuación x 2 + y 2 = R 2 (en el plano<br />
OXY). Por tanto, debe ser también x 2 0 + y 2 0 = R 2 . Es decir, hemos probado<br />
que, si (x0, y0, z0) es cualquier punto de S, entonces necesariamente se verifica<br />
9<br />
1.5<br />
(x0,y0,0)<br />
2<br />
2.5<br />
2.5<br />
2<br />
1.5<br />
1<br />
Eje OY<br />
0<br />
0.5<br />
−0.5<br />
−1<br />
−1.5
x 2 0 + y 2 0 = R 2 . Para poder asegurar que la ecuación de S es x 2 + y 2 = R 2 ,<br />
debemos probar también que, si el punto (x0, y0, z0) es tal que x 2 0 + y 2 0 = R 2 ,<br />
entonces dicho punto pertenece a S. Esto es obvio pues (x0, y0, 0) pertenece<br />
a C y (x0, y0, z0) pertenece a la generatriz que pasa por (x0, y0, 0).<br />
Ejemplos 1.2.1. a) x 2 + z 2 = R 2 es la ecuación de la superficie cilíndrica<br />
de radio R y eje OY.<br />
Eje OZ<br />
2<br />
1<br />
0<br />
−1<br />
−2<br />
4<br />
2<br />
Eje OY<br />
0<br />
−2<br />
−2<br />
−1<br />
0<br />
Ejee OX<br />
b) z 2 = x 2 + y 2 es la ecuación implícita de la superficie cónica siguiente<br />
10<br />
1<br />
2
6<br />
4<br />
2<br />
0<br />
−2<br />
−4<br />
−4<br />
−2<br />
0<br />
Eje OX<br />
2<br />
4<br />
4<br />
Eje OZ<br />
2<br />
Eje OY<br />
1.3. Derivadas parciales de primer orden.<br />
Sean f : D ⊂ R 2 → R y (x0, y0) ∈ D. Si existe y es finito<br />
su valor se denota por<br />
o<br />
lím<br />
x→x0<br />
0<br />
−2<br />
−4<br />
f(x, y0) − f(x0, y0)<br />
, (1.2)<br />
x − x0<br />
∂f<br />
∂x (x0, y0)<br />
f ′ x(x0, y0)<br />
y recibe el nombre de derivada parcial de f con respecto a x en el punto<br />
(x0, y0). De forma similar se define la derivada parcial con respecto a y:<br />
11
∂f<br />
∂y (x0, y0) = lím<br />
y→y0<br />
que se denota también por f ′ y(x0, y0).<br />
f(x0, y) − f(x0, y0)<br />
,<br />
y − y0<br />
Ejemplo 1.3.1. Sea f(x, y) = xy2<br />
x 2 +y 2 , si (x, y) = (0, 0), y f(0, 0) = 0. Las<br />
derivadas parciales en el origen se obtienen de la siguiente forma:<br />
∂f<br />
f(x, 0) − f(0, 0)<br />
(0, 0) = lím<br />
∂x x→0 x − 0<br />
= lím<br />
x→0<br />
0<br />
x2 − 0<br />
x<br />
0<br />
= lím<br />
x→0 x<br />
=<br />
= lím 0 = 0<br />
x→0<br />
∂f<br />
f(0, y) − f(0, 0)<br />
(0, 0) = lím<br />
∂y y→0 y − 0<br />
= lím<br />
y→0<br />
0<br />
y2 − 0<br />
y<br />
0<br />
= lím<br />
y→0 y<br />
=<br />
= lím 0 = 0.<br />
x→0<br />
De (1.1) se sigue que, para x cercano a x0, el cociente incremental<br />
f(x, y0) − f(x0, y0)<br />
x − x0<br />
estará muy próximo a su límite. Por tanto, la derivada parcial ∂f<br />
∂x (x0, y0)<br />
representa la velocidad con que varía f en el punto (x0, y0) y a lo largo de<br />
la recta y = y0, ya que haciendo el producto ∆x ∂f<br />
∂x (x0, y0) se obtiene una<br />
aproximación del incremento<br />
f(x0 + ∆x, y0) − f(x0, y0),<br />
y la aproximación es tanto mejor en cuanto que el incremento ∆x es más<br />
pequeño.<br />
Análogamente, la derivada parcial ∂f<br />
∂y (x0, y0) representa la velocidad con<br />
que varía la función en el punto (x0, y0) a lo largo de la recta x = x0.<br />
12
Debe notarse que la derivada parcial ∂f<br />
∂x (x0, y0) no es otra cosa que la<br />
derivada con respecto a x, en el punto x0, de la función de x que resulta<br />
cuando hacemos y = y0 en f(x, y). Es decir, es la derivada de f(x, y0) con<br />
respecto a x.<br />
Las funciones más simples, como las que son el resultado de realizar las<br />
operaciones habituales entre funciones derivables elementales, poseen las dos<br />
derivadas parciales en cada punto (x, y), En estos casos, ∂f<br />
∂x<br />
y ∂f<br />
∂y<br />
se obtienen<br />
derivando f respecto de x e y, respectivamente, y suponiendo constante la<br />
otra variable.<br />
Ejemplos 1.3.2. a) f(x, y) = x sen(xy).<br />
b) f(x, y) = xy<br />
1+y 2 .<br />
∂f<br />
(x, y) = sen(xy) + xy cos(xy)<br />
∂x<br />
∂f<br />
∂y (x, y) = x2 cos(xy).<br />
∂f y<br />
(x, y) =<br />
∂x 1 + y2 ∂f<br />
∂y = x1 + y2 − y2y<br />
(1 + y2 ) 2<br />
x(1 − y<br />
= 2 )<br />
(1 + y2 .<br />
) 2<br />
1.4. Derivadas de orden superior.<br />
Sea f una función que posee derivadas parciales de primer orden en cada<br />
punto de cierto conjunto D ⊂ R 2 . Las funciones<br />
y<br />
(x, y) ∈ D → f ′ x(x, y) ∈ R<br />
(x, y) ∈ D → f ′ y(x, y) ∈ R<br />
13
se denotan por f ′ x y f ′ y, respectivamente, y reciben el nombre de funciones<br />
derivadas parciales de primer orden de f. Sus derivadas parciales de primer<br />
orden se denominan derivadas parciales de segundo orden de f. Así, por<br />
ejemplo, el siguiente límite<br />
f<br />
lím<br />
x→x0<br />
′ x(x, y0) − f ′ x(x0, y0)<br />
x − x0<br />
es la derivada parcial de primer orden con respecto a x de la función f ′ x en<br />
el punto (x0, y0).<br />
Se denota por f ′′<br />
xx(x0, y0) (derivada parcial de segundo orden de f<br />
con respecto a x dos veces).<br />
Las derivadas parciales cruzadas, f ′′<br />
xy(x0, y0) y f ′′<br />
yx(x0, y0), en general son<br />
diferentes. Sus definiciones precisas son<br />
f ′′<br />
f<br />
yx(x0, y0) = lím<br />
x→x0<br />
′ y(x, y0) − f ′ y(x0, y0)<br />
x − x0<br />
f ′′<br />
xy(x0, y0) = lím<br />
y→y0<br />
f ′ x(x0, y) − f ′ x(x0, y0)<br />
.<br />
y − y0<br />
Nótese que f ′′<br />
yx(x0, y0) es la derivada parcial de f ′ y con respecto a x en<br />
el punto (x0, y0). Esta notación para las derivadas de orden superior es más<br />
cómoda que la notación clásica siguiente<br />
∂2f ∂x∂y (x0, y0) = ∂ ∂f <br />
(x0, y0),<br />
∂x ∂y<br />
Vamos a ver un ejemplo de una función f para la que f ′ xy(0, 0) = −1 y<br />
f ′ yx(0, 0) = 1.<br />
Ejemplo 1.4.1. Calcular las derivadas cruzadas en el origen de la función<br />
y f(0, 0) = 0.<br />
f(x, y) = xy x2 − y2 x2 + y2 <br />
, si (x, y) = (0, 0)<br />
14
Derivando respecto de x, considerando y constante, obtenemos<br />
para (x, y) = (0, 0).<br />
f ′ x(x, y) = (3x2 y − y 3 )(x 2 + y 2 ) − (x 3 y − xy 3 )2x<br />
(x 2 + y 2 ) 2<br />
= y(x4 + 4x2y2 − y4 )<br />
(x2 + y2 ) 2 ,<br />
Derivando ahora respecto de y, considerando x constante, resulta<br />
para (x, y) = (0, 0).<br />
f ′ y(x, y) = (x3 − 3xy 2 )(x 2 + y 2 ) − (x 3 y − xy 3 )2y<br />
(x 2 + y 2 ) 2<br />
= x(x4 − 4x2y2 − y4 )<br />
(x2 + y2 ) 2 ,<br />
Para calcular las derivadas parciales en el origen debemos acudir a la<br />
definición:<br />
f ′ f(x, 0) − f(0, 0)<br />
x(0, 0) = lím<br />
x→0 x − 0<br />
0<br />
= lím<br />
x→0 x<br />
= lím 0 = 0<br />
x→0<br />
f ′ f(0, y) − f(0, 0)<br />
y(0, 0) = lím<br />
x→0 y − 0<br />
0<br />
= lím<br />
y→0 y<br />
= lím 0 = 0.<br />
y→0<br />
= lím<br />
x→0<br />
= lím<br />
y→0<br />
0<br />
x2 − 0<br />
x − 0 =<br />
0<br />
y2 − 0<br />
y − 0 =<br />
Ahora estamos en condiciones de proceder a calcular las derivadas par-<br />
ciales de segundo orden en el origen:<br />
f ′′<br />
f<br />
yx(0, 0) = lím<br />
x→0<br />
′ y(x, 0) − f ′ y(0, 0)<br />
x − 0<br />
x − 0<br />
= lím<br />
x→0 x − 0<br />
15<br />
= 1<br />
=<br />
=<br />
=
f ′′<br />
f<br />
xy(0, 0) = lím<br />
y→0<br />
′ x(0, y) − f ′ x(0, 0)<br />
= lím<br />
y→0<br />
−y − 0<br />
y − 0<br />
y − 0<br />
= −1.<br />
Definición 1.4.2. Sean D un subconjunto abierto de R 2 y k un número<br />
natural mayor o igual que 1. Diremos que una función f es de clase k en D<br />
si f posee todas las derivadas parciales hasta las de orden k y son continuas<br />
en D (se denota f ∈ C k (D)).<br />
Se demuestra que, si f es una función de clase k ≥ 2 en un<br />
abierto D y de cualquier número de variables, la derivada parcial<br />
de orden k, f k x1x2..xk no cambia su valor si sustituimos x1, x2, ..., xk por<br />
una permutación cualquiera. Por ejemplo, si f ∈ C 3 (D), entonces<br />
las derivadas de tercer orden f ′′′<br />
xxy, f ′′′<br />
xyx y f ′′′<br />
yxx son iguales en cada<br />
punto de D.<br />
1.5. La derivada direccional.<br />
Ninguna de las derivadas parciales<br />
∂f<br />
∂x (x0, y0), ∂f<br />
∂y (x0, y0)<br />
nos sirve cuando necesitamos un valor aproximado del incremento<br />
f(x, y) − f(x0, y0),<br />
si x = x0 e y = y0, simultáneamente. Necesitamos un tipo de derivada más<br />
adecuado para esta situación y que recibe el nombre de derivada direccional.<br />
Dado un vector cualquiera v = (v1, v2) y un punto (x0, y0), la ecuación de<br />
la recta que pasa por (x0, y0) y es paralela a v tiene por ecuaciones paramétri-<br />
cas <br />
x = x0 + tv1<br />
y = y0 + tv2<br />
16<br />
=
O<br />
y o<br />
Y<br />
x o<br />
r<br />
v<br />
x = x<br />
o<br />
+ t v<br />
1<br />
y = y + t v<br />
o 2<br />
Si v = (v1, v2) es unitario (v 2 1 + v 2 2 = 1), se define la derivada de f en<br />
el punto (x0, y0) y en la dirección del vector v como el valor del límite<br />
siguiente<br />
y se denota por<br />
X<br />
f(x0 + tv1, y0 + tv2) − f(x0, y0)<br />
lím<br />
t→0<br />
t<br />
Dvf(x0, y0).<br />
Ahora podemos dar respuesta a la cuestión anterior; si queremos un valor<br />
aproximado del incremento<br />
f(x, y) − f(x0, y0),<br />
siendo x = x0 e y = y0, podemos usar la derivada direccional Dvf(x0, y0) con<br />
v un vector unitario paralelo a<br />
Entonces existe t ∈ R tal que<br />
(x − x0, y − y0).<br />
(x − x0, y − y0) = tv;<br />
17
es decir,<br />
por<br />
(x, y) = (x0, y0) + tv.<br />
Si (x, y) es cercano a (x0, y0), t será próximo a 0 y podemos aproximar<br />
f(x, y) − f(x0, y0)<br />
tDvf(x0, y0).<br />
Por tanto, el significado de Dvf(x0, y0) es claro: se trata de la velocidad<br />
con que varía la función f en (x0, y0) a lo largo de la recta r que pasa por<br />
(x0, y0) y lleva la dirección de v. Nótese que las derivadas parciales ∂f ∂f<br />
y ∂x ∂y son<br />
casos particulares de derivada direccional. Concretamente, son las derivadas<br />
de f en las direcciones de e1 y e2, respectivamente.<br />
En un apartado posterior, veremos una forma muy simple de calcular las<br />
derivadas direccionales, válida para las funciones diferenciables.<br />
Terminamos este apartado mencionando una interpretación gráfica de la<br />
derivada direccional: la derivada direccional Dvf(x0, y0) es la pendiente de la<br />
recta tangente en el punto (x0, y0, f(x0, y0)) a la curva que resulta de cortar<br />
la superficie de ecuación z = f(x, y) con el plano que contiene la recta r y es<br />
perpendicular al plano z = 0.<br />
18
1.6. La diferencial total.<br />
Las diferenciales parciales<br />
∂f<br />
∂x (x0, y0) · ∆x<br />
19
y<br />
∂f<br />
∂y (x0, y0) · ∆y<br />
nos ofrecen una buena aproximación del incremento de la función cuando se<br />
pasa del punto (x0, y0) a un punto de la forma (x0 + ∆x, y0) o (x0, y0 + ∆y),<br />
respectivamente.<br />
Para tener una buena aproximación del incremento<br />
se ocurre usar la suma<br />
f(x0 + ∆x, y0 + ∆y) − f(x0, y0)<br />
f ′ x(x0, y0)∆x + f ′ y(x0, y0)∆y<br />
Esta expresión recibe el nombre de diferencial total de f en el punto<br />
(x0, y0), respecto de los incrementos ∆x y ∆y, y se denota por<br />
df(x0, y0; ∆x, ∆y)<br />
o más brevemente por df(x0, y0), si no hay peligro de confusión.<br />
La diferencial puede escribirse de una forma más cómoda usando el gra-<br />
diente de f.<br />
∂f<br />
∂x (x0, y0), ∂f<br />
∂y (x0, y0) <br />
se llama gradiente de f en el punto (x0, y0) y se denota por ∇f(x0, y0).<br />
Una vez introducido el gradiente, podemos escribir la diferencial en la forma<br />
df(x0, y0; ∆x, ∆y) = ∇f(x0, y0) · (∆x, ∆y).<br />
Volviendo al problema de aproximar el incremento<br />
f(x0 + ∆x, y0 + ∆y) − f(x0, y0)<br />
mediante la diferencial df(x0, y0), nos falta establecer qué grado de aproxi-<br />
mación vamos a exigir para considerar aceptable la aproximación de<br />
20
f(x0 + ∆x, y0 + ∆y) − f(x0, y0)<br />
por df(x0, y0). Parece conveniente recordar el caso de funciones de una vari-<br />
able y exigir un grado de aproximación análogo.<br />
Si f es una función de una variable derivable en x0, hemos visto que<br />
Es decir, la diferencia<br />
f(x) − f(x0) − f<br />
lím<br />
x→x0<br />
′ (x0)(x − x0)<br />
x − x0<br />
f(x) − f(x0) − df(x0)<br />
= 0.<br />
es un infinitésimo de orden superior a (x − x0). En el caso de varias variables<br />
exigiremos análogamente que la diferencia<br />
f(x, y) − f(x0, y0) − df(x0, y0)<br />
sea un infinitésimo de orden superior al tamaño del incremento de la variable<br />
(vectorial) independiente:<br />
(x − x0) 2 + (y − y0) 2 .<br />
Por todo ello, diremos quef es diferenciable en (x0, y0) si existe ∇f(x0, y0)<br />
y se verifica<br />
f(x, y) − f(x0, y0) − df(x0, y0)<br />
lím <br />
(x,y)→(x0,y0) (x − x0) 2 + (y − y0) 2<br />
= 0. (1.3)<br />
Destacamos seguidamente las tres características más importantes de las<br />
funciones diferenciables:<br />
mento<br />
a) La diferencial total df(x0, y0; ∆x, ∆y) es una aproximación del incre-<br />
f(x0 + ∆x, y0 + ∆y) − f(x0, y0)<br />
tanto mejor en cuanto que ∆x y ∆y sean pequeños.<br />
21
) Por complicada que sea f(x, y), la función afín<br />
p(x, y) =<br />
= f(x0, y0) + ∂f<br />
∂x (x0, y0) · (x − x0)+<br />
+ ∂f<br />
∂y (x0, y0) · (y − y0)<br />
es una buena aproximación de f(x, y), en las cercanías de (x0, y0), en el<br />
sentido de que el error es un infinitésimo de mayor orden que el tamaño del<br />
incremento de la variable (vectorial) independiente<br />
(x − x0) 2 + (y − y0) 2 .<br />
c) Recordamos que si un plano tiene por ecuación<br />
Ax + By + Cz + D = 0,<br />
entonces el vector de coordenadas (A, B, C) es perpendicular a dicho plano.<br />
Por (1.2) el plano de ecuación<br />
z = f(x0, y0) + ∂f<br />
∂x (x0, y0) · (x − x0)+<br />
+ ∂f<br />
∂y (x0, y0) · (y − y0)<br />
y la superficie de ecuación z = f(x, y) son casi coincidentes en las proximi-<br />
dades del punto (x0, y0, f(x0, y0)).<br />
Este plano se tomará como plano tangente a la superficie en el punto<br />
(x0, y0, f(x0, y0)).<br />
Ejemplo 1.6.1. Plano tangente a z = x 2 +y 2 en el punto (2, 2, 8). Calculamos<br />
las derivadas parciales de primer orden:<br />
z ′ x = 2x, z ′ y = 2y.<br />
22
Particularizando al punto (2, 2), resulta<br />
z ′ x(2, 2) = z ′ y(2, 2) = 4.<br />
Por tanto, la ecuación del plano tangente viene dada por z = 8 + 4(x − 2) +<br />
4(y − 2), que se reduce a z = 4x + 4y − 8.<br />
Más adelante, veremos que dicho plano tiene la propiedad de que contiene<br />
al vector tangente (en dicho punto) a toda curva contenida en la superficie.<br />
23
1.7. Condición suficiente de diferenciabili-<br />
dad.<br />
En el caso de funciones de una variable, hemos visto que la derivabilidad<br />
de f en un punto x0 implica que se verifica<br />
f(x) − f(x0) − f<br />
lím<br />
x→x0<br />
′ (x0) · (x − x0)<br />
x − x0<br />
= 0.<br />
Es decir, para funciones de una variable no hay diferencia alguna entre deriv-<br />
able y diferenciable.<br />
Sin embargo, es importante señalar que, para funciones de varias variables,<br />
el hecho de que una función tenga derivadas parciales de primer orden en un<br />
punto no implica que la función sea diferenciable en dicho punto. El ejemplo<br />
siguiente muestra que pueden existir todas las derivadas direccionales en un<br />
punto y, sin embargo, la función no es diferenciable.<br />
Ejemplo 1.7.1. Sea f(x, y) = xy2<br />
x 2 +y 4 , si (x, y) = (0, 0), y f(0, 0) = 0. Comprobar<br />
que f no es diferenciable en el origen, pero existen todas las derivadas<br />
direccionales.<br />
Consideremos un vector unitario v = (v1, v2); la derivada direccional<br />
Dvf(0, 0) viene dada por<br />
f(tv1, tv2) − f(0, 0)<br />
Dvf(0, 0) = lím<br />
t→0 t<br />
= lím<br />
t→0<br />
t 3 v1v 2 2<br />
t 2 v 2 1 +t4 v 4 2<br />
t<br />
− 0<br />
= lím<br />
t→0<br />
v1v 2 2<br />
v 2 1 + t 2 v 4 2<br />
=<br />
= v2 2<br />
.<br />
v1<br />
El resultado obtenido es válido si v1 = 0. Si v1 = 0, la derivada direccional<br />
Dv(0, 0) no es otra cosa que la derivada parcial f ′ y(0, 0), que procedemos a<br />
calcular<br />
f ′ f(0, y) − f(0, 0)<br />
y(0, 0) = lím<br />
y→0 y − 0<br />
24<br />
=
= lím<br />
y→0<br />
0<br />
y4 − 0<br />
y<br />
0<br />
= lím<br />
y→0 y<br />
= lím 0 = 0.<br />
y→0<br />
Por tanto, hemos probado que existen todas las derivadas direccionales de<br />
f en (0, 0) y ∇f(0, 0) = (0, 0).<br />
existe<br />
Sin embargo, f no es diferenciable en (0, 0), pues el límite siguiente no<br />
f(x, y) − f(0, 0) − ∇f(0, 0) · (x, y)<br />
lím<br />
<br />
(x,y)→(0,0)<br />
x2 + y2 xy<br />
= lím<br />
(x,y)→(0,0)<br />
2<br />
,<br />
x2 + y2 (x2 + y4 )<br />
pues los límites a través de las rectas que pasan por el origen, y = mx,<br />
dependen del valor de m.<br />
El teorema siguiente nos ofrece una condición suficiente y de fácil apli-<br />
cación para que una función de dos variables que tiene gradiente en un punto<br />
sea diferenciable en dicho punto.<br />
Teorema 1.7.2. (Condición suficiente de diferenciabilidad). Sean f : D ⊂<br />
R 2 → R y (x0, y0) un punto interior de D. Si existe ∇f(x0, y0) y, además,<br />
existe una de las dos derivadas parciales, ∂f<br />
∂x<br />
=<br />
∂f<br />
o , en cada punto de un<br />
∂y<br />
entorno Er(x0, y0) y es continua en (x0, y0), entonces f es diferenciable en<br />
(x0, y0).<br />
Sigue del teorema anterior que toda función de clase uno en un abierto<br />
D (f ∈ C 1 (D)) es diferenciable en cada punto de D.<br />
Ejemplo 1.7.3. Las funciones f(x, y) = x 2 + y 2 y g(x, y) = e x sen y son<br />
diferenciables en cada punto de R 2 , pues sus derivadas parciales de primer<br />
orden son obviamente continuas en R 2 .<br />
25
1.8. Propiedades de las funciones diferencia-<br />
bles.<br />
a) Si f es diferenciable en (x0, y0), entonces f es continua en dicho punto.<br />
Para demostrar esta afirmación, definimos r(x, y) como el cociente<br />
f(x, y) − f(x0, y0) − ∇f(x0, y0) · (x − x0, y − y0)<br />
<br />
(x − x0) 2 + (y − y0) 2<br />
.<br />
Entonces podemos expresar la diferencia<br />
en la forma<br />
f(x, y) − f(x0, y0)<br />
f(x, y) − f(x0, y0) = ∂f<br />
∂x (x0, y0) · (x − x0)+<br />
+ ∂f<br />
∂y (x0, y0) · (y − y0)+<br />
+r(x, y) · (x − x0) 2 + (y − y0) 2 .<br />
Ahora basta observar que el segundo miembro tiene por límite 0 cuando<br />
(x, y) → (x0, y0).Nótese que sabemos que<br />
lím r(x, y) = 0.<br />
(x,y)→(x0,y0)<br />
26
Por tanto, resulta<br />
<br />
lím f(x, y) − f(x0, y0)<br />
(x,y)→(x0,y0)<br />
= 0.<br />
b) La suma, producto y cociente de funciones diferenciables es diferencia-<br />
ble (si el divisor no se anula en el punto en cuestión, en el caso del cociente),<br />
y el gradiente verifica las siguientes relaciones que son consecuencia directa<br />
de las propiedades de la derivada parcial:<br />
1) ∇(f + g)(x0, y0) =<br />
2) ∇(f · g)(x0, y0) =<br />
3) ∇(f/g)(x0, y0) =<br />
= ∇f(x0, y0) + ∇g(x0, y0).<br />
= g(x0, y0) · ∇f(x0, y0) + f(x0, y0) · ∇g(x0, y0).<br />
= g(x0, y0) · ∇f(x0, y0) − f(x0, y0) · ∇g(x0, y0)<br />
g(x0, y0) 2<br />
.<br />
c) Si f es diferenciable en (x0, y0), entonces existe cualquier derivada di-<br />
reccional de f en (x0, y0) y se verifica<br />
si v = (cos α, sen α).<br />
Dvf(x0, y0) = ∇f(x0, y0) · v =<br />
cos α ∂f<br />
∂x f(x0, y0) + sen α ∂f<br />
∂y (x0, y0),<br />
La demostración es muy simple. Sabemos que el límite doble (1.2) es 0.<br />
Entonces también vale 0 el límite a través de la recta (x, y) = (x0, y0) + tv.<br />
Es decir, se tiene que es nulo el límite cuando t → 0 del cociente<br />
f(x0 + tv1, y0 + tv2 − f(x0, y0) − ∇f(x0, y0) · tv<br />
,<br />
|t|<br />
lo que implica que también es nulo el límite cuando t → 0 + de<br />
27
f(x0 + tv1, y0 + tv2) − f(x0, y0)<br />
− ∇f(x0, y0) · v.<br />
t<br />
De forma similar se prueba que existe el otro límite lateral, cuando t → 0− ,<br />
y tiene el mismo valor.<br />
d) Si f es diferenciable en (x0, y0) con gradiente no nulo, entonces ∇f(x0, y0)<br />
apunta en la dirección de máximo crecimiento de f en el punto (x0, y0).<br />
Acabamos de ver que Dvf(x0, y0) = ∇f(x0, y0) · v. Por tanto, se verifica<br />
la desigualdad<br />
|Dvf(x0, y0)| ≤ |∇f(x0, y0)| · |v| = |∇f(x0, y0)|,<br />
ya que |v| = 1. Es decir, cada derivada direccional está comprendida entre<br />
dos valores extremos<br />
−|∇f(x0, y0)| ≤ Dvf(x0, y0) ≤ |∇f(x0, y0)|.<br />
Ahora probamos que se alcanzan dichos valores extremos. Basta tomar<br />
En efecto, se tiene<br />
v1 =<br />
1<br />
|∇f(x0, y0)| ∇f(x0, y0), v2 = −v1.<br />
Dv1f(x0, y0) = ∇f(x0, y0) · v1 =<br />
= ∇f(x0, y0) ·<br />
De donde sigue finalmente que<br />
1<br />
|∇f(x0, y0)| ∇f(x0, y0) =<br />
= |∇f(x0, y0)|.<br />
Dv2f(x0, y0) = ∇f(x0, y0) · (−v1) =<br />
= −|∇f(x0, y0)|<br />
Existen dos direcciones de crecimiento nulo: la direcciones perpendiculares<br />
al gradiente. En efecto, si v3 es un vector unitario perpendicular a ∇f(x0, y0),<br />
entonces Dv3 = ∇f(x0, y0) · v3 = 0.<br />
28
Ejemplo 1.8.1. Sea f(x, y) = x 2 + y 2 , vamos a determinar las direcciones<br />
de crecimiento máximo y mínimo de f en un punto arbitrario (x0, y0).<br />
Calculamos el gradiente:<br />
∇f(x0, y0) = (2x0, 2y0).<br />
Vemos que, salvo en el origen, es no nulo. Debemos asegurarnos de que la<br />
función es diferenciable. Para ello, aplicamos la condición suficiente de dife-<br />
renciabilidad, que en nuestro caso se cumple de sobra pues f tiene derivadas<br />
parciales de primer orden continuas en todo R 2 . Entonces la dirección de<br />
máximo crecimiento de f en el punto (x0, y0) viene dada por el vector unitario<br />
en la dirección y sentido del gradiente<br />
v1 =<br />
1<br />
4(x 2 0 + y 2 0) (2x0, 2y0) =<br />
1<br />
<br />
2 x0 + y2 (x0, y0).<br />
0<br />
Por tanto, si estamos en el punto (x0, y0) (distinto del origen) y queremos<br />
pasar a un punto cercano pero con el mayor crecimiento de f posible, deber-<br />
emos movernos en dirección radial y alejándonos del origen. Sin embargo, si<br />
nos movemos en dirección radial y hacia el origen, entonces f experimenta<br />
el mayor decrecimiento.<br />
Las direcciones de crecimiento nulo vienen dadas por los vectores de la<br />
√ x 2 0 +y 2 o<br />
forma v = ± 1<br />
(−y0, x0). Nótese que la recta que pasa por (x0, y0) y<br />
es paralela a v es tangente a la curva de nivel x 2 + y 2 = x 2 0 + y 2 0 en el<br />
punto (x0, y0). Por tanto, no es sorprendente que ésta sea la dirección de<br />
crecimiento nulo, pues a lo largo de la curva de nivel f permanece constante<br />
y esta curva y su tangente en (x0, y0) casi son idénticas en las proximidades<br />
de ese punto.<br />
29
2 2<br />
2 2<br />
0 0<br />
x + y = x + y<br />
y 0<br />
O<br />
Y<br />
x 0<br />
PROBLEMAS RESUELTOS<br />
v<br />
P<br />
P(x ,y )<br />
0 0<br />
1. Usando la definición, probar que la función f(x, y) = xy √ , si (x, y) =<br />
x2 +y2 0, y f(0, 0) = 0 no es diferenciable en el origen.<br />
Tenemos que calcular las derivadas parciales de primer orden en (0, 0):<br />
f ′ f(x, 0) − f(0, 0)<br />
x(0, 0) = lím<br />
x→0 x − 0<br />
0 − 0<br />
= lím<br />
x→0 x − 0<br />
= 0.<br />
f ′ f(0, y) − f(0, 0)<br />
y(0, 0) = lím<br />
y→0 y − 0<br />
0<br />
= lím<br />
y→0 y − 0<br />
30<br />
= 0.<br />
-v<br />
=<br />
=<br />
X
Por tanto, la diferencial vale 0, por lo que f es diferenciable en (0, 0) si el<br />
límite siguiente existe y vale 0<br />
f(x, y) − f(0, 0) − df(0, 0; x, y)<br />
lím <br />
(x,y)→(0,0) (x − 0) 2 + (y − 0) 2<br />
= lím<br />
(x,y)→(0,0)<br />
xy<br />
x2 .<br />
+ y2 Pero este límite doble no existe, basta calcular los límites a través de las<br />
rectas y = mx y comprobar que dependen de la pendiente m:<br />
lím<br />
(x, y) → (0, 0)<br />
y = mx<br />
=<br />
xy<br />
x2 mx<br />
= lím<br />
+ y2 x→0<br />
2<br />
x2 =<br />
(1 + m2 = m<br />
.<br />
1 + m2 2. Una lámina metálica de forma triangiular tiene 12 cm de base y 9 cm de<br />
altura. Se calienta en un horno durante un tiempo. Al extraerla del horno<br />
su base se ha incrementado en 0.15 cm y su altura en 0.2 cm. Usar la<br />
diferencial para determinar un valor aproximado del incremento de área.<br />
El área de un triángulo de base x cm y altura y cm es igual a A(x, y) = 1<br />
2 xy.<br />
El incremento de área, A(12 + ∆x, 9 + ∆y) − A(12, 9), puede aproximarse<br />
por la diferencial<br />
dA = ∂A<br />
∂x<br />
∂A<br />
(12, 9)∆x + (12, 9)∆y.<br />
∂y<br />
En nuestro caso ∆x = 0.15 y ∆y = 0.2. Calculamos, pues, las derivadas<br />
parciales de primer orden de A(x, y):<br />
∂A<br />
∂x<br />
1 ∂A<br />
= y ,<br />
2 ∂y<br />
= 1<br />
2 x.<br />
En particular, las derivadas parciales en el punto (12, 9) vienen dadas por<br />
∂A 1<br />
(12, 9) = · 9 = 4.5<br />
∂x 2<br />
31
∂A 1<br />
(12, 9) = · 12 = 6.<br />
∂y 2<br />
Por tanto, el valor aproximado del incremento de área que nos ofrece la<br />
diferencial es<br />
∆A ≈ 4.5 · 0.15 + 6 · 0.2 = 1.875 cm 2 .<br />
Si se hace el cálculo exacto, el incremento de área vale ∆A = 1.890,<br />
luego, el error cometido al aproximar con la diferencial es igual a 0.015.<br />
Señalamos que el cálculo de la derivada direccional mediante la expresión<br />
Dnf(x0, y0) = ∇f(x0, y0) · n,<br />
sólo es posible si la función f es diferenciable en el punto (x0, y0). Lo que<br />
en este caso es obvio, pues f tiene derivadas parciales de primer orden<br />
continuas en todo el plano.<br />
3. Se considera la superficie de ecuación z = Rx/y (y > 0), siendo R una<br />
constante positiva.<br />
a) Determinar la curva de máxima pendiente que pasa por el punto (x0, y0, z(x0, y0)).<br />
b) La presión de un mol de un gas ideal viene dada por P = RT/V .<br />
Interpretar el resultado obtenido en el apartado anterior, considerando<br />
que el gas ocupa un volumen V0 y su temperatura absoluta es T0.<br />
a) Buscamos una curva y = y(x) con la propiedad de que, en cada uno de<br />
sus puntos, el vector tangente (1, y ′ (x)) es paralelo a ∇z = (R/y, −Rx/y 2 ).<br />
Por tanto, se tiene<br />
Simplificando, obtenemos<br />
R/y<br />
1<br />
−Rx/y2<br />
=<br />
y ′ .<br />
(x)<br />
1 = −x<br />
,<br />
yy ′<br />
lo que conduce a la ecuación diferencial yy ′ = −x. Integrando respecto de<br />
x ambos miembros, resulta<br />
y 2 = −x 2 + c.<br />
32
Vemos que es una circunferencia de centro el origen y radio √ c. Para que<br />
pase por el punto pedido, el valor de la constante c debe ser c = x 2 0 + y 2 0.<br />
Por tanto la curva de máxima pendiente sobre nuestra superficie es<br />
<br />
z = Rx/y<br />
x 2 + y 2 = x 2 0 + y 2 0<br />
b) El estado actual del gas se representa en el plano OT V por el punto<br />
(T0, V0). El apartado anterior nos dice que, si queremos reducir la presión,<br />
la forma más conveniente consiste en modificar la temperatura T y el<br />
volumen V de modo que T 2 + V 2 = T 2 0 + V 2<br />
0 .<br />
4. La temperatura en cada punto de una cierta región del plano OXY viene<br />
dada por T (x, y) = 2x 2 − 4y 2 + 40. Si estamos en el punto (−1, 2), de-<br />
terminar la trayectoria más conveniente que debe seguirse para acceder a<br />
zonas de menor temperatura.<br />
La curva ideal y = y(x) es aquella que, pasando por el punto (−1, 2),<br />
tiene la propiedad de que el vector tangente (en cada punto) apunta en la<br />
dirección y sentido opuesto del gradiente. Es decir, si (x0, y0) es un punto<br />
cualquiera de la curva, deben ser paralelos el vector tangente (1, y ′ (x0)) y<br />
∇T (x0, y0) = (4x0, −8y0). Por tanto, se verifica<br />
para cada x0. Es decir,<br />
4x0<br />
1<br />
= −8y0<br />
y ′ ,<br />
x0y ′ (x0) = −2y0.<br />
Hemos encontrado una ecuación diferencial de primer orden que debe ver-<br />
ificar la curva buscada:<br />
xy ′ = −2y.<br />
Se trata de una ecuación de variables separables que se resuelve fácilmente<br />
si se expresa en la forma<br />
y ′ /y = −2/x.<br />
33
Nótese que el primer miembro es la derivada de log |y|. Si se escribe la<br />
ecuación diferencial en la forma<br />
′<br />
log |y| = − 2<br />
x ,<br />
se puede ahora integrar miembro a miembro respecto de x y resulta<br />
log |y| = −2 log |x| + c.<br />
Si dejamos la constante de integración sola en el segundo miembro, obten-<br />
emos<br />
o lo que es lo mismo<br />
log |y| + 2 log |x| = c<br />
log x 2 |y| = c.<br />
Entonces x 2 |y| = k. Hemos obtenido, pues, que la curva tiene la forma<br />
y = a/x 2 , donde a es una constante arbitraria. Ahora debemos obligar a<br />
la curva a pasar por el pùnto (−1, 2) y obtenemos que a = 2. La curva<br />
buscada es y = 2x −2 .<br />
5. Probar que la derivada direccional de f(x, y) = x 2 + y 2 en cada punto de<br />
la circunferencia x 2 + y 2 = 1 y en la dirección normal a ésta es constan-<br />
temente igual a −2.<br />
Sea (x0, yo) un punto cualquiera de la circunferencia. Vamos a calcular<br />
el vector unitario normal en dicho punto. A partir de la expresión y =<br />
√<br />
1 − x2 ′ , encontramos y (x0) = −x0 √<br />
1−x2 0<br />
. Entonces la ecuación de la recta<br />
tangente a la circunferencia n el punto (x0, y0) viene dada por<br />
y = y0 + −x0<br />
(x − x0).<br />
2 1 − x0 Recordemos que el vector unitario normal a una recta de ecuación Ax +<br />
By + C = 0 viene dado por<br />
n =<br />
1<br />
√ (A, B).<br />
A2 + B2 34
En nuestro caso, tiene la forma<br />
<br />
n = 1 − x2 0(<br />
−x0<br />
, −1) =<br />
2 1 − x0 <br />
= (−x0, − 1 − x2 0).<br />
Ahora necsitamos calcular el gradiente de f(x, y) en el punto (x0, y0):<br />
∇f(x0, y0) = (2x0, 2y0).<br />
Finalmente, obtenemos la derivada direccional pedida<br />
Dnf(x0, y0) = ∇f(x0, y0) · n =<br />
<br />
= (2x0, 2y0) · (−x0, − 1 − x2 0) =<br />
<br />
1 − x2 0.<br />
= −2x 2 0 − 2y0<br />
Ahora basta tener en cuenta que x 2 0 + y 2 0 = 1, o lo que es lo mismo, y0 =<br />
1 − x 2 0, para deducir que Dnf(x0, y0) = −2. De nuevo señalamos que<br />
el cálculo de la derivada direccional mediante la expresión Dnf(x0, y0) =<br />
∇f(x0, y0) · n, sólo es posible si la función f es diferenciable en el punto<br />
(x0, y0). Lo que en este caso es obvio, pues f tiene derivadas parciales de<br />
primer orden continuas en todo el plano.<br />
6. Sea u(x, y, z) =<br />
√ 1 . Demostrar que se verifica la identidad<br />
x2 +y2 +z2 ∂ 2 T<br />
∂x 2 + ∂2 u<br />
∂y2 + ∂2u = 0.<br />
∂z2 Para la derivación, escribimos u en la forma más conveniente siguiente:<br />
u(x, y, z) = (x2 + y2 + z2 1<br />
− ) 2 . Calculamos la derivada parcial de u respecto<br />
de x<br />
∂u<br />
∂x<br />
= −1<br />
2 (x2 + y 2 + z 2 3<br />
−<br />
) 2 2x =<br />
= −x(x 2 + y 2 + z 2 3<br />
−<br />
) 2 .<br />
35
Por la simetría de la función u(x, y, z), copiamos adecuadamente la deriva-<br />
da anterior para obtener las otras dos:<br />
∂u<br />
∂y = −y(x2 + y 2 + z 2 3<br />
−<br />
) 2<br />
∂u<br />
∂z = −z(x2 + y 2 + z 2 3<br />
−<br />
) 2 .<br />
Procedemos ahora a calcular las derivadas parciales segundas:<br />
<br />
= − (x 2 + y 2 + z 2 3<br />
−<br />
)<br />
∂2T =<br />
∂x2 2 + x − 3<br />
2<br />
2 2 2 −<br />
(x + y + z ) 5<br />
<br />
2 2x =<br />
= −(x 2 + y 2 + z 2 3<br />
−<br />
) 2 + 3x 2 (x 2 + y 2 + z 2 5<br />
−<br />
) 2 .<br />
Como antes, por simetría, encontramos las otras dos derivadas de segundo<br />
orden:<br />
∂2u ∂y2 = −(x2 + y 2 + z 2 3<br />
−<br />
) 2 + 3x 2 (x 2 + y 2 + z 2 5<br />
−<br />
) 2 .<br />
∂ 2 u<br />
∂z2 = −(x2 + y 2 + z 2 3<br />
−<br />
) 2 + 3x 2 (x 2 + y 2 + z 2 5<br />
−<br />
) 2 .<br />
Sumando las tres derivadas de segundo orden, resulta<br />
∂2T ∂x2 + ∂2u ∂y2 + ∂2u =<br />
∂z2 = −(x 2 + y 2 + z 2 ) −3<br />
2 + 3x 2 (x 2 + y 2 + z 2 ) −5<br />
2 −<br />
−(x 2 + y 2 + z 2 ) −3<br />
2 + 3y 2 (x 2 + y 2 + z 2 ) −5<br />
2 −<br />
−(x 2 + y 2 + z 2 ) −3<br />
2 + 3z 2 (x 2 + y 2 + z 2 ) −5<br />
2 =<br />
−3(x 2 + y 2 + z 2 ) −3<br />
2 + 3(x 2 + y 2 + z 2 ) −5<br />
2 (x 2 + y 2 + z 2 ) =<br />
= −3(x 2 + y 2 + z 2 ) −3<br />
2 +<br />
+3(x 2 + y 2 + z 2 ) −3<br />
2 = 0.<br />
36
PROBLEMAS PROPUESTOS<br />
1. Determinar las curvas de nivel de la función<br />
a)f(x, y) = x2 + y2 , b)f(x, y) = xy.<br />
x + y<br />
2. Comprobar que las rectas y = mx son curvas de nivel de la función<br />
f(x, y) = xy<br />
x2 .<br />
+ y2 Deducir que no existe el límite doble en el origen de la función f.<br />
3. Comprobar que las parábolas x = y 2 son curvas de nivel de la función<br />
f(x, y) = xy2<br />
x2 .<br />
+ y4 Deducir que no existe el límite doble en el origen de la función f.<br />
4. Determinar las curvas de nivel de f(x, y) = xy<br />
x+y 2 . Deducir que no existe el<br />
límite doble en el origen.<br />
5. Calcular el límite doble en el origen de<br />
a)f(x, y) = x3<br />
x2 + y2 , b)f(x, y) = sen x2y2 x2 + y<br />
6. Calcular las derivadas parciales de segundo orden de las funciones sigu-<br />
ientes:<br />
a) f(x, y) = x 2 +y 2 cos(xy), b) f(x, y) = log<br />
2 .<br />
<br />
x+y<br />
, c) f(x, y) =<br />
x−y<br />
√x<br />
x<br />
2 +y2 .<br />
Soluciones: a) f ′′<br />
xx(x, y) = 2 − y4 cos xy, f ′′<br />
yy(x, y) = 2 cos xy − 4xy sen xy −<br />
x2y2 cos xy, f ′′<br />
xy(x, y) = −3y2 sen xy − y3x cos xy. b) f ′′<br />
xx(x, y) = 4xy/(x2 −<br />
y2 ) 2 = f ′′<br />
yy(x, y) y f ′′<br />
xy(x, y) = −2(x2 + y2 )/(x2 − y2 ) 2 . c) f ′′<br />
xx(x, y) =<br />
−3y 2 x/(x 2 + y 2 ) (5/2) , f ′′<br />
yy(x, y) = x(x 2 + y 2 ) −(3/2) − 3xy 2 (x 2 + y 2 ) −(5/2)<br />
yf ′′<br />
xy(x, y) = 2y(x 2 + y 2 ) −(3/2) − 3y 3 (x 2 + y 2 ) −(5/2) .<br />
37
7. Estudiar si la funciones siguientes son diferenciables en el origen:<br />
a) f(x, y) = x3 +y 3<br />
x 2 +y 2 si (x, y) = (0, 0)y f(0, 0) = 0 b) f(x, y) = xy2<br />
x 2 +y 2 si<br />
(x, y) = (0, 0) y f(0, 0) = 0.<br />
Solución: No son diferenciables en el origen.<br />
8. Comprobar que cada una de las funciones siguientes verifica la ecuación<br />
que se indica:<br />
a) f(x, y) = e xy + sen(x + y), xf ′ x − yf ′ y = (x − y) cos(x + y).<br />
b) f(x, y, z) = cos<br />
<br />
x+y<br />
, xf 2z<br />
′ x + yf ′ y + zf ′ z = 0.<br />
9. Calcular las derivadas parciales de segundo orden de la función f(x, y) =<br />
y2 cos( x)<br />
si y = 0 y f(x, y) = 0 en otro caso.<br />
y<br />
Solución: f ′′<br />
xx(x, y) = − cos x ′′ , f y yy(x, y) = 2 cos x<br />
y<br />
f ′′<br />
xy(x, y) = − sen x<br />
+ 2x<br />
y<br />
sen x<br />
y<br />
− x2<br />
y 2 cos x<br />
y y<br />
x x<br />
′′<br />
+ cos si y = 0. f y y y xx(x, 0) = 0. f ′′<br />
yy(x, 0) no existe si<br />
x = 0, pero f ′′<br />
yy(0, 0) = 2. f ′′<br />
xy(x, 0) no existe si x = 0, pero f ′′<br />
xy(0, 0) = 0.<br />
10. La ecuación de Van der Waals de los gases reales establece que la presión<br />
P , el volumen V y la temperatura T están relacionados de forma que se<br />
verifica: P + a<br />
V 2<br />
<br />
(V − b) = RT (a, b y R son constantes positivas). a)<br />
Calcular ∂P<br />
∂V y ∂2P ∂V 2 . b) Si Pc, Vc y Tc son los valores críticos de un sistema<br />
de una sóla componente, se sabe que las dos derivadas parciales anteriores<br />
se anulan en el punto crítico. Expresar Pc, Vc y Tc en función de a, b y R.<br />
Solución: P ′ V = −RT/(V − b)2 + 2a/V 3 y P ′′<br />
V V<br />
= 2RT<br />
(V −b) 3 − 6a<br />
V 4 .<br />
11. Demostrar que la función f(x, y) = a log(x 2 + y 2 ) + b cumple la ecuación<br />
de Laplace: ∆f = f ′′<br />
Solución: f ′′<br />
xx(x, y) = a<br />
xx + f ′′<br />
<br />
2y2−2x2 yy = 0.<br />
<br />
(x 2 +y 2 ) 2<br />
y f ′′<br />
<br />
2x2−2y2 yy(x, y) = a (x2 +y2 ) 2<br />
<br />
.<br />
12. Usar el cálculo diferencial para probar que el plano tangente a una esfera<br />
es perpendicular al radio que pasa por el punto de contacto.<br />
38
Solución: Si el sistema de coordenadas tiene su origen en el centro de<br />
la esfera, entonces su ecuación es z = R 2 − x 2 − y 2 , siendo R el ra-<br />
dio. Un vector perpendicular al plano tangente en el punto (x0, y0, z0) es<br />
(z ′ x(x0, y0), z ′ −x0<br />
y(x0, y0), −1) = ( √<br />
R2−x02−y 2 0<br />
,<br />
−y0 √<br />
R2−x2−y 2 , −1) y (x0, y0, z0) es<br />
el radio vector que pasa por el punto de contacto. Nótese que son propor-<br />
cionales, pues z0 = R 2 − x 2 0 − y 2 0<br />
13. Calcular aproximadamente:<br />
a) (0.92) 3 + (2.09) 3<br />
b) log(0.09 3 + 0.99 3 ).<br />
Soluciones: a) (0.92) 3 + (2.09) 3 ≈ 3.14. b) log(0.09 3 + 0.99 3 ) ≈ −0.03.<br />
14. Para medir el área de un triángulo ABC se usa la expresión:<br />
Área =<br />
bc sen A.<br />
(a) Mediante el cálculo diferencial, determinar un valor aproximado<br />
2<br />
del error absoluto que se comete en la medición del área, si ∆b, ∆c y<br />
∆A son los errores absolutos en las medidas de b, c y A. (b) Usar el<br />
resultado obtenido en el apartado anterior para determinar el error relativo<br />
en la medida del área en función de los errores relativos de b, c y A. (c)<br />
Suponiendo que A es casi un ángulo recto, deducir razonadamente, a partir<br />
de la expresión encontrada en (b), que el error relativo en la medida del<br />
área depende fundamentalmente de los errores en las medidas de b y c.<br />
15. El periodo de un péndulo simple viene dado por T = 2π ℓ/g. Si ∆ℓ y<br />
∆g son los errores absolutos en las medidas de ℓ y g, usar la diferencial<br />
para determinar los errores absoluto y relativo cometidos en la medida de<br />
T .<br />
16. Se considera un rectángulo de dimensiones 12 cm y 16 cm. Si el la-<br />
do menor se incrementa en 2 mm y el mayor se reduce 1.5 mm, usar<br />
la diferencial para calcular aproximadamente la variación en el área del<br />
rectángulo.<br />
Solución: El área aumenta aproximadamente 1.4cm 2 .<br />
39
17. Un insecto está en un medio tóxico. El nivel de toxicidad viene dado por<br />
T (x, y) = 50 + 2x 2 + 3y 2 . Si el insecto se encuentra en el punto (1, 2),<br />
encontrar la trayectoria más conveniente que deberá tomar.<br />
Solución: Debe seguir la dirección contraria al gradiente de T (x, y) a lo<br />
largo de la curva y = 2 |x| 3 .<br />
18. La ladera de una montaña tiene la forma de la superficie z = xy (x, y ≥<br />
0). Si estamos en el punto (10, 20, 200), determinar la trayectoria más<br />
conveniente para descender de la montaña.<br />
Solución: La trayectoria está determinada por el sistema y = √ 300 + x 2<br />
y z = xy, recorrida desde el punto de coordenadas (10, 20, 200) hasta<br />
(0, 10 √ 3, 0).<br />
19. La forma de una montaña está dada por la superficie z = h 2 − (x 2 + y 2 ).<br />
Si nos encontramos en el punto ( h h , 2 2 , h √ ), encontrar la trayectoria más<br />
2<br />
conveniente que debería tomarse para bajar de la montaña.<br />
Solución: Sea f(x, y) = h 2 − (x 2 + y 2 ). Para que z = f(x, y) decrezca<br />
más rápidamente en el punto en cuestión, debemos seguir la dirección con-<br />
traria a ∇f. La trayectoria es una curva sobre la montaña cuya proyecciób<br />
sobre OXY es la curva xy = h 2 /4. La trayectoria está determinada por el<br />
sistema z 2 = h 2 − x 2 − y 2 e 4xy = h 2 .<br />
20. Calcular el plano tangente en un punto arbitrario de la superficie de<br />
ecuación z = x 2 + y 2 y comprobar que dicho plano contiene la generatriz<br />
que pasa por el punto de contacto.<br />
Solución: La ecuación del plano tangente en el punto (x0, y0, x 2 0 + y 2 0)<br />
tiene la forma z = (xx0 + yy0)/ x 2 0 + y 2 0. Para probar que se cortan<br />
superficie y plano según una recta, se estudia el sistema formado por las<br />
ecuaciones respectivas. Igualando las expresiones de z, obtenemos (xy0 −<br />
yx0) 2 = 0. xy0 − yx0 = 0 es la ecuación de un plano vertical que, al<br />
cortar al plano tangente determina una recta que también pertenece a la<br />
superficie.<br />
40
21. Si el potencial de un campo de fuerzas plano viene dado por V (x, y) =<br />
log(x 2 + y 2 ), determinar las líneas de fuerza.<br />
Solución: y(c + (3/2) log x) = 1.<br />
22. Consideramos la función f(x, y, z) = x 2 −y 2 +z 2 y la curva de ecuaciones<br />
paramétricas<br />
x = cos(t), y = sen(t), z = t (t ∈ [0, π]).<br />
Calcular la derivada de f en cada punto de la curva y en la dirección de<br />
la tangente. Determinar su valor máximo.<br />
Solución: La derivada direccional vale 2(t − sen 2t) y su valor máximo es<br />
5π/3 + √ 3 que lo alcanza para t = 5π/6.<br />
41