Introducción al Sistema de Posicionamiento Global ... - El Agrimensor
Introducción al Sistema de Posicionamiento Global ... - El Agrimensor
Introducción al Sistema de Posicionamiento Global ... - El Agrimensor

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
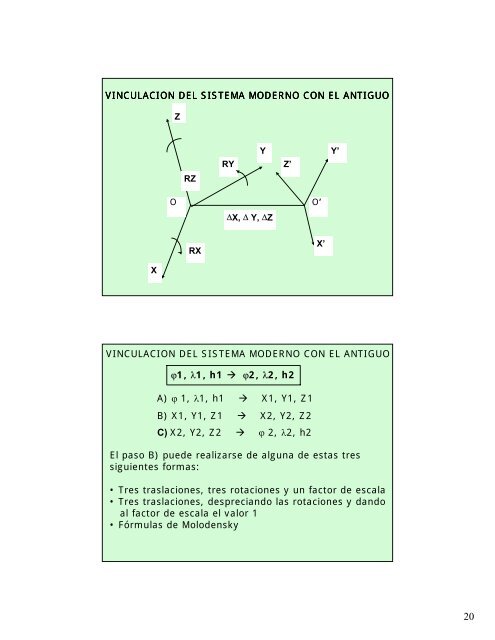
VINCULACION DEL SISTEMA MODERNO CON EL ANTIGUO<br />
X<br />
O<br />
Z<br />
RZ<br />
RX<br />
RY<br />
∆X, ∆ Y, ∆Z<br />
Y Y’<br />
VINCULACION DEL SISTEMA MODERNO CON EL ANTIGUO<br />
Z’<br />
ϕ1, λ1, h1 ϕ2, λ2, h2<br />
A) ϕ 1, λ1, h1 X1, Y1, Z1<br />
B) X1, Y1, Z1 X2, Y2, Z2<br />
C) X2, Y2, Z2 ϕ 2, λ2, h2<br />
<strong>El</strong> paso B) pue<strong>de</strong> re<strong>al</strong>izarse <strong>de</strong> <strong>al</strong>guna <strong>de</strong> estas tres<br />
siguientes formas:<br />
• Tres traslaciones, tres rotaciones y un factor <strong>de</strong> esc<strong>al</strong>a<br />
• Tres traslaciones, <strong>de</strong>spreciando las rotaciones y dando<br />
<strong>al</strong> factor <strong>de</strong> esc<strong>al</strong>a el v<strong>al</strong>or 1<br />
•Fórmulas <strong>de</strong> Molo<strong>de</strong>nsky<br />
O’<br />
X’<br />
20