Control Avanzado de Máquinas de Inducción
Control Avanzado de Máquinas de Inducción
Control Avanzado de Máquinas de Inducción

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
UNIVERSIDAD PONTIFICIA COMILLAS DE MADRIDEscuela Técnica Superior <strong>de</strong> Ingeniería (ICAI)Departamento <strong>de</strong> Electrónica y Automática<strong>Control</strong> <strong>Avanzado</strong> <strong>de</strong> Máquinas <strong>de</strong> InducciónJosé Daniel Muñoz FríasTesis DoctoralMadrid 2002
III
A mis padres, porque sin ellos nada <strong>de</strong> lo quehay aquí escrito hubiera visto la luz.V
VIIEvery gun that is ma<strong>de</strong>, every warship launched, every rocket fired signifiesin the final sense, a theft from those who hunger and are not fed,those who are cold and are not clothed. This world in arms is not spendingmoney alone. It is spending the sweat of its laborers, the genius ofits scientists, the hopes of its children. This is not a way of life at allin any true sense. Un<strong>de</strong>r the clouds of war, it is humanity hanging on across of iron.– Dwight Eisenhower, April 16, 1953Cuando veo que 866.000 millones <strong>de</strong> dólares se van en armas mientras1.300 millones <strong>de</strong> personas viven con menos <strong>de</strong> un dólar al día en laTierra, no lo entiendo.– Fe<strong>de</strong>rico Mayor Zaragoza
VIII
Agra<strong>de</strong>cimientosAhora que termina esta tesis, es momento <strong>de</strong> parar, echar la vista atrás, y darse cuenta<strong>de</strong> que este largo camino no hubiera sido posible recorrerlo sin la ayuda <strong>de</strong> muchaspersonas e instituciones. Es por tanto necesario rendir un tributo a todas ellas en estasúltimas páginas que escribo.En primer lugar tengo que agra<strong>de</strong>cer a mi director <strong>de</strong> tesis, Aurelio García Cerrada,todo el apoyo que me ha prestado, todo el tiempo que me ha <strong>de</strong>dicado y, sobre todo, laamistad que me ha brindado.En segundo lugar tengo que agra<strong>de</strong>cer a los <strong>de</strong>más miembros <strong>de</strong>l LAE su compañerismoy su amistad. A lo largo <strong>de</strong> estos años hemos compartido trabajo, ilusiones y, por quéno <strong>de</strong>cirlo, alguna que otra explosión. La ayuda <strong>de</strong> Juan Luis Zamora ha sido fundamentala la hora <strong>de</strong> poner en marcha los estimadores <strong>de</strong> flujo y <strong>de</strong> resistencia <strong>de</strong> rotor.Andrew Robertson montó la bancada y el sistema <strong>de</strong> adquisición <strong>de</strong> datos con los que sehan realizado los ensayos <strong>de</strong> esta tesis. Christine Heller siempre tuvo palabras <strong>de</strong> apoyocuanto todo salía mal. Por último Pablo García y Fi<strong>de</strong>l Fernán<strong>de</strong>z han tenido siempre lapaciencia suficiente para esperar a que tuviese tiempo <strong>de</strong> solucionar los problemas quehan surgido con la FPGA <strong>de</strong> modulación.La ayuda <strong>de</strong> los alumnos Ismael Sanz y Jordi Catalán ha sido fundamental. El primerodiseñó la placa <strong>de</strong> circuito impreso <strong>de</strong> la tarjeta <strong>de</strong> modulación e interfaz con el enco<strong>de</strong>r,mientras que el segundo aplicó por primera vez las estrategias <strong>de</strong> minimización <strong>de</strong> pérdidasal motor <strong>de</strong> inducción.La construcción <strong>de</strong>l LAE no hubiese sido posible sin la perseverancia <strong>de</strong> Aurelio, eltrabajo <strong>de</strong> Ramón Rodriguez Vigo, Roberto Faure y Manuel Navajas y el apoyo económico<strong>de</strong> la Fundación Universitaria Comillas-ICAI (antiguo Patronato <strong>de</strong>l ICAI) y <strong>de</strong> laEscuela Técnica Superior <strong>de</strong> Ingeniería ICAI. A<strong>de</strong>más, la Comisión Interministerial <strong>de</strong>Ciencia y Tecnología realizó una ayuda (ref: PB91-0216-C20-00) para la adquisición <strong>de</strong>parte <strong>de</strong> la instrumentación <strong>de</strong>l LAE.También tengo que agra<strong>de</strong>cer a todos los miembros <strong>de</strong>l Departamento <strong>de</strong> Electrónicay Automática su amistad y ayuda a lo largo <strong>de</strong> estos años. Nombrarlos a todos seríalargo y, dado mi <strong>de</strong>spiste habitual, es posible que me olvidase <strong>de</strong> alguien. Sin embargo,merecen una mención especial los miembros <strong>de</strong>l taller <strong>de</strong> mantenimiento, Antonio Martíny José María Bautista, cuya ayuda en el montaje <strong>de</strong>l banco ha sido fundamental.También merecen estar aquí todos los que <strong>de</strong> una manera u otra han sufrido esta tesisconmigo. Luiso, Pablete, Cloti y Jorge compartieron piso conmigo y ahí estaban cuandonecesitaba su apoyo. Nieves y Luis han compartido conmigo unas cuantas maratones yalguna que otra carrera popular a lo largo <strong>de</strong> estos años y siempre han tenido palabras <strong>de</strong>aliento durante esta carrera <strong>de</strong> fondo que es realizar una tesis.
XAgra<strong>de</strong>cimientosComo se verá más a<strong>de</strong>lante, la mayor parte <strong>de</strong> esta tesis se ha <strong>de</strong>sarrollado usandosoftware libre. Es pues necesario agra<strong>de</strong>cer el esfuerzo <strong>de</strong> todos los programadores quehan diseñado el software usado en esta tesis sin esperar nada a cambio. Richard Stallman,a<strong>de</strong>más <strong>de</strong> fundar el proyecto GNU, es el autor inicial <strong>de</strong> GNU Emacs y <strong>de</strong> GNU CCompiler (gcc), que han sido el editor <strong>de</strong> texto y el compilador <strong>de</strong> C usados a lo largo <strong>de</strong>este trabajo. Como sistema operativo se ha usado Linux, por lo que es necesario ofrecermi gratitud a Linus Torvalds y a toda la comunidad <strong>de</strong> hackers que han contribuido a su<strong>de</strong>sarrollo; especialmente a Michael Barabanov y Victor Yodaiken que <strong>de</strong>sarrollaron lavariante <strong>de</strong> tiempo real Real-Time Linux. Las simulaciones llevadas a cabo se han realizadoutilizando el paquete Gnans, <strong>de</strong>sarrollado por Bengt Mårtensson. Para realizar eldiseño <strong>de</strong> los controladores y para visualizar los resultados se ha usado Octave, <strong>de</strong>sarrolladopor John W. Eaton. Las figuras <strong>de</strong> la tesis se han dibujado con Xfig, escrito porSupoj Sutanthavibul. Por último la tesis se ha compuesto usando LATEX, <strong>de</strong>sarrollado porLeslie Lamport, el cual está basado en TEX, que ha sido <strong>de</strong>sarrollado por Donald Knuth.Por último, quiero <strong>de</strong>s<strong>de</strong> aquí agra<strong>de</strong>cer a mis padres todo el apoyo que me han prestado.Ellos siempre han confiado en mí y se han sacrificado para darme lo mejor. Sin dudason ellos los que han dado sentido a todo el trabajo que a continuación se <strong>de</strong>scribe.
Agra<strong>de</strong>cimientosXI
XIIÍndice General
Índice general1. Introducción 11.1. Motivación y antece<strong>de</strong>ntes . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Organización <strong>de</strong> la exposición . . . . . . . . . . . . . . . . . . . . . . . 42. <strong>Control</strong> mediante linealización exacta 72.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. Linealización exacta entrada-salida mediante realimentación. . . . . . . . . 82.3. Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . . . . . 92.3.1. Diseño <strong>de</strong>l controlador lineal . . . . . . . . . . . . . . . . . . . . 122.3.2. Detalles <strong>de</strong> implementación . . . . . . . . . . . . . . . . . . . . 122.3.3. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 132.4. Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . . . . . 182.4.1. Diseño <strong>de</strong>l controlador lineal . . . . . . . . . . . . . . . . . . . . 202.4.2. Detalles <strong>de</strong> implementación . . . . . . . . . . . . . . . . . . . . 212.4.3. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 222.5. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243. <strong>Control</strong> <strong>de</strong> Lyapunov 273.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2. Fundamentos <strong>de</strong>l <strong>Control</strong> <strong>de</strong> Lyapunov . . . . . . . . . . . . . . . . . . . 273.2.1. Ecuaciones <strong>de</strong>l controlador . . . . . . . . . . . . . . . . . . . . . 293.2.2. Influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en el controlador <strong>de</strong> Lyapunov. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.3. <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator . . . . 313.3.1. <strong>Control</strong> <strong>de</strong> la máquina <strong>de</strong> inducción en modo corriente . . . . . . 323.3.2. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 343.4. <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> flujo. . . . . . 433.4.1. <strong>Control</strong> <strong>de</strong>l inversor en modo corriente en ejes <strong>de</strong> flujo . . . . . . 453.4.2. Detalles <strong>de</strong> implementación . . . . . . . . . . . . . . . . . . . . 463.4.3. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 473.5. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494. <strong>Control</strong> Lyapunov-Integral 514.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.2. Fundamentos <strong>de</strong> control Lyapunov-Integral . . . . . . . . . . . . . . . . 514.2.1. Ecuaciones <strong>de</strong>l controlador . . . . . . . . . . . . . . . . . . . . . 53
XIVÍndice General4.2.2. Influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en el controlador Lyapunov-Integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 534.2.3. <strong>Control</strong> Lyapunov-Integral bajo saturación <strong>de</strong> la salida . . . . . . 554.3. <strong>Control</strong> Lyapunov-Integral <strong>de</strong> la máquina <strong>de</strong> inducción en ejes. . . . . . . . 564.3.1. Mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes <strong>de</strong> rotor . . . . . . . . . . 564.3.2. Ecuaciones <strong>de</strong>l controlador . . . . . . . . . . . . . . . . . . . . . 574.3.3. Efecto <strong>de</strong> las perturbaciones <strong>de</strong> la carga sobre el controlador . . . 584.4. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . . . . . 594.4.1. Simulación en tiempo continuo con inversor fuente <strong>de</strong> corriente . 604.4.2. Simulación en tiempo discreto con inversor fuente <strong>de</strong> tensióncontrolado por corriente . . . . . . . . . . . . . . . . . . . . . . 614.4.3. Respuesta dinámica frente a un escalón en la referencia <strong>de</strong> velocidad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.5. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655. <strong>Control</strong> vectorial directo 675.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.2. Diseño <strong>de</strong>l controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.2.1. Diseño <strong>de</strong>l control <strong>de</strong> flujo . . . . . . . . . . . . . . . . . . . . . 695.2.2. Diseño <strong>de</strong>l controlador <strong>de</strong> velocidad . . . . . . . . . . . . . . . . 705.3. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . . . . . 715.4. Comparación con el controlador Lyapunov-Integral . . . . . . . . . . . . 725.4.1. <strong>Control</strong>adores <strong>de</strong> corriente . . . . . . . . . . . . . . . . . . . . . 735.4.2. <strong>Control</strong>adores <strong>de</strong> flujo y <strong>de</strong> velocidad . . . . . . . . . . . . . . . 735.5. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766. Estimación <strong>de</strong>l flujo <strong>de</strong> rotor 776.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 776.2. Estimadores <strong>de</strong> or<strong>de</strong>n reducido en lazo abierto . . . . . . . . . . . . . . . 786.2.1. Estimador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> flujo . . . . . . . . . . . 786.2.2. Estimador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator . . . . . . . . . . 796.2.3. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 806.3. Estimador <strong>de</strong> la resistencia <strong>de</strong>l rotor . . . . . . . . . . . . . . . . . . . . 826.3.1. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 846.4. Estimador <strong>de</strong> flujo <strong>de</strong> rotor integrado con un controlador Lyapunov. . . . . 866.4.1. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 896.5. Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator . . . . . . . . . . . . . . 906.5.1. Diseño <strong>de</strong>l observador . . . . . . . . . . . . . . . . . . . . . . . 906.5.2. Aplicación <strong>de</strong>l observador . . . . . . . . . . . . . . . . . . . . . 926.5.3. Implantación <strong>de</strong>l observador en tiempo discreto. . . . . . . . . . 946.5.4. Implantación <strong>de</strong>l observador en tiempo discreto sin cambio <strong>de</strong>variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.5.5. Resultados <strong>de</strong> simulación . . . . . . . . . . . . . . . . . . . . . . 966.6. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Índice GeneralXV7. Plataforma experimental 1017.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1017.2. Descripción <strong>de</strong>l banco <strong>de</strong> ensayos . . . . . . . . . . . . . . . . . . . . . 1017.3. <strong>Control</strong> <strong>de</strong>l inversor mediante modulación vectorial . . . . . . . . . . . . 1037.3.1. Tensiones generadas por un inversor trifásico en ejes d-q. . . . . . 1037.3.2. Generación <strong>de</strong> un vector espacial <strong>de</strong> tensión arbitrario. . . . . . . 1057.4. Circuito coprocesador para la temporización <strong>de</strong>l inversor. . . . . . . . . . 1067.4.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l circuito . . . . . . . . . . . . . . . . . 1077.5. Medida <strong>de</strong> la velocidad con un enco<strong>de</strong>r incremental . . . . . . . . . . . . 1087.5.1. Funcionamiento <strong>de</strong> un enco<strong>de</strong>r incremental . . . . . . . . . . . . 1087.5.2. Métodos <strong>de</strong> medida <strong>de</strong> velocidad a partir <strong>de</strong> un enco<strong>de</strong>r incremental1097.5.3. Errores cometidos en la medida <strong>de</strong> velocidad . . . . . . . . . . . 1107.5.4. Circuito basado en FPGA para medida <strong>de</strong> los pulsos <strong>de</strong>l enco<strong>de</strong>r . 1107.6. Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo real . . . . . . . . . . . 1117.6.1. El sistema operativo RT-Linux . . . . . . . . . . . . . . . . . . . 1127.6.2. Metodología <strong>de</strong> programación en RT-Linux . . . . . . . . . . . . 1147.6.3. Estructura <strong>de</strong>l programa <strong>de</strong> control . . . . . . . . . . . . . . . . . 1147.7. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1188. Resultados 1218.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1218.2. <strong>Control</strong>ador Lyapunov-Integral . . . . . . . . . . . . . . . . . . . . . . . 1218.2.1. Estimación <strong>de</strong> la resistencia <strong>de</strong> rotor . . . . . . . . . . . . . . . . 1248.3. <strong>Control</strong> vectorial directo . . . . . . . . . . . . . . . . . . . . . . . . . . 1258.4. <strong>Control</strong> vectorial indirecto . . . . . . . . . . . . . . . . . . . . . . . . . 1268.5. <strong>Control</strong>ador Lyapunov-Integral en modo generador . . . . . . . . . . . . 1308.6. <strong>Control</strong>ador Lyapunov-Integral con minimización <strong>de</strong> pérdidas . . . . . . 1318.7. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1339. Conclusiones, aportaciones y sugerencias 1359.1. Resumen y conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . 1359.2. Aportaciones originales . . . . . . . . . . . . . . . . . . . . . . . . . . . 1409.3. Sugerencias para futuros trabajos . . . . . . . . . . . . . . . . . . . . . . 141A. Mo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong> inducción. 143A.1. Transformación <strong>de</strong> Park . . . . . . . . . . . . . . . . . . . . . . . . . . . 143A.2. Mo<strong>de</strong>lo en variables <strong>de</strong> estado . . . . . . . . . . . . . . . . . . . . . . . 144A.2.1. Mo<strong>de</strong>lo en ejes genéricos . . . . . . . . . . . . . . . . . . . . . . 145A.2.2. Mo<strong>de</strong>lo en ejes <strong>de</strong> estator. . . . . . . . . . . . . . . . . . . . . . 145A.2.3. Mo<strong>de</strong>lo en ejes <strong>de</strong> flujo <strong>de</strong> rotor . . . . . . . . . . . . . . . . . . 146A.3. Mo<strong>de</strong>lo basado en vectores espaciales . . . . . . . . . . . . . . . . . . . 146A.3.1. Mo<strong>de</strong>lo en ejes genéricos . . . . . . . . . . . . . . . . . . . . . . 146A.3.2. Mo<strong>de</strong>lo usado para la estimación <strong>de</strong> la resistencia <strong>de</strong> rotor . . . . 147A.4. Mo<strong>de</strong>lo basado en circuito equivalente . . . . . . . . . . . . . . . . . . . 148
XVIÍndice GeneralB. Parámetros <strong>de</strong>l motor 151B.1. Motor Indar <strong>de</strong> 15 kW . . . . . . . . . . . . . . . . . . . . . . . . . . . 151B.2. Motor AEG <strong>de</strong> 250 W . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151C. Herramientas matemáticas 153C.1. Herramientas <strong>de</strong> geometría diferencial . . . . . . . . . . . . . . . . . . . 153D. Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutación <strong>de</strong> las ramas <strong>de</strong>l inversor 155D.1. Localización <strong>de</strong>l vector u S en una <strong>de</strong> las seis regiones <strong>de</strong>l inversor . . . . 156D.2. Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutación . . . . . . . . . . . . . . . . . . 157E. Implantación <strong>de</strong>l controlador cuando existe un retardo en la aplicación. . . 159E.1. Diseño <strong>de</strong>l controlador <strong>de</strong> corriente con retardo en la aplicación. . . . . . . 160F. <strong>Control</strong> vectorial indirecto 161F.1. Orientación al campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161F.2. Cálculo <strong>de</strong> las referencias <strong>de</strong> las corrientes . . . . . . . . . . . . . . . . . 161F.3. <strong>Control</strong> <strong>de</strong> velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162G. <strong>Control</strong> con minimización <strong>de</strong> pérdidas 163G.1. Minimización <strong>de</strong> pérdidas óhmicas . . . . . . . . . . . . . . . . . . . . . 163G.2. Detalles <strong>de</strong> implementación . . . . . . . . . . . . . . . . . . . . . . . . . 164
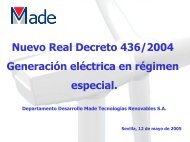
Índice <strong>de</strong> figuras1.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l controlador mediante linealización entrada-salida.Los valores <strong>de</strong> referencia se han <strong>de</strong>notado mediante el subíndice r. . . . . 22.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento . . . . . . . . . . . . . . . . . . 132.2. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor con el controlador implantado en tiempocontinuo. Eje x en seg. Ejes y en W b 2 y rad el s. . . . . . . . . . . . . . . 142.3. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 1ms. Eje x en seg. Ejes y en W b 2 y rad el s. . . . . . . . . . . . . . . . 142.4. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 0¢ 1ms. Eje x en seg. Ejes y en W b 2 y rad el s. . . . . . . . . . . . . . . 152.5. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s. Eje x en seg. Ejesy en W b 2 y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.6. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s e inercia igual a1kgr¤ m 2 . Eje x en seg. Ejes y en Wb 2 y rad 0¢ el s. . . . . . . . . . . . . . . 172.7. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s 1ms pero con inercia igual a 0¢ 1kgr¤ m 2 . Eje x en seg. Ejes y en Wb 2¡y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.8. Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento . . . . . . . . . . . . . . . . . . 212.9. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor con el controlador implantado en tiempocontinuo. Eje x en seg. Ejes y en W b y rad el s. . . . . . . . . . . . . . . . 222.10. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 1ms. Eje x en seg. Ejes y en W b y rad el s. . . . . . . . . . . . . . . . . 232.11. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 0¢ 1ms. Eje x en seg. Ejes y en W b y rad el s. . . . . . . . . . . . . . . . 242.12. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto conT s ¡ 1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s. Eje x en seg. Ejesy en W b y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.1. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov en tiempo continuo . . . . . 343.2. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente<strong>de</strong> corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto conperiodo <strong>de</strong> muestreo <strong>de</strong> 1ms . . . . . . . . . . . . . . . . . . . . . . . . 35
XVIIIÍndice <strong>de</strong> Figuras3.3. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente<strong>de</strong> corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto conperiodo <strong>de</strong> muestreo <strong>de</strong> 0¢ 1ms . . . . . . . . . . . . . . . . . . . . . . . 363.4. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente<strong>de</strong> corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto conperiodo <strong>de</strong> muestreo <strong>de</strong> 1ms suponiendo m l ¡ 0 . . . . . . . . . . . . . . 373.5. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov <strong>de</strong> alta ganancia implantadoen tiempo discreto con T s ¡ 1ms suponiendo m l ¡ 0 . . . . . . . . . . . . 373.6. Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov <strong>de</strong> alta ganancia implantadoen tiempo discreto con T s ¡ 1ms suponiendo m l ¡ 0. Accionamiento conJ ¡ 0¢ 1kgr¤ m 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.7. Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente en régimen permanente (– i s Sd – – is Sd r ).La constante <strong>de</strong> tiempo en lazo cerrado es igual a 4 ms. . . . . . . . . . . 403.8. Evolución <strong>de</strong> las salidas. <strong>Control</strong>ador <strong>de</strong> corriente con 4ms <strong>de</strong> constante<strong>de</strong> tiempo en lazo cerrado . . . . . . . . . . . . . . . . . . . . . . . . . . 403.9. Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente en régimen permanente (– i s Sd – – is Sd r ).La constante <strong>de</strong> tiempo en lazo cerrado es igual a 0¢ 5 ms. . . . . . . . . . 413.10. Evolución <strong>de</strong> las salidas. <strong>Control</strong>ador <strong>de</strong> corriente con 0¢ 5ms <strong>de</strong> constante<strong>de</strong> tiempo en lazo cerrado . . . . . . . . . . . . . . . . . . . . . . 423.11. Evolución <strong>de</strong> las salidas con el controlador <strong>de</strong> Lyapunov <strong>de</strong> alta ganancia 423.12. Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente digital en régimen permanente (–i s Sd – – is Sdr). La constante <strong>de</strong> tiempo en lazo cerrado es igual a 4 ms y lafrecuencia <strong>de</strong> muestreo es <strong>de</strong> 1 kHz. . . . . . . . . . . . . . . . . . . . . 433.13. Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento . . . . . . . . . . . . . . . . . . 463.14. Evolución <strong>de</strong> las salidas con los controladores implantados en ejes <strong>de</strong>flujo <strong>de</strong> rotor (– salidas, - - referencias) . . . . . . . . . . . . . . . . . . . 473.15. Evolución <strong>de</strong> las salidas <strong>de</strong>l accionamiento con inercia elevada (– salidas,- - referencias) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.1. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -) con anti-windup. Eje xen seg. Eje y en W b y en rad el s. . . . . . . . . . . . . . . . . . . . . . . . 614.2. Evolución <strong>de</strong> las salidas. Eje x en seg. Eje y en Wb y rad el s. . . . . . . . . . 624.3. Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg.Eje y en Wb y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 634.4. Respuesta a un escalón en la referencia <strong>de</strong> velocidad. (–) respuesta real,(- -) respuesta teórica. (a) Accionamiento con un inversor fuente <strong>de</strong>corriente. (b) í<strong>de</strong>m. (a) pero con error en el mo<strong>de</strong>lado <strong>de</strong> la inercia. (c)Accionamiento con un inversor fuente <strong>de</strong> tensión. (d) í<strong>de</strong>m. (c) pero concontrolador implantado con T s ¡ 0¢ 5 ms. Eje x en seg. Eje y en rad el s. . . . 644.5. Evolución <strong>de</strong> las salidas. Eje x en seg. Eje y en Wb y rad el s. . . . . . . . . . 644.6. Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg.Eje y en Wb y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.1. Evolución <strong>de</strong> las salidas <strong>de</strong>l sistema. Eje x en seg. Eje y en Wb y rad el s. . . 72
Índice <strong>de</strong> FigurasXIX5.2. Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg.Eje y en Wb y rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 726.1. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes<strong>de</strong> rotor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 806.2. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes<strong>de</strong> estator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.3. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes<strong>de</strong> flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> corriente. . . . . . . . . . . . . . 826.4. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes<strong>de</strong> flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> tensión y T s ¡ 0¢ 5 ms. . . . . . . . 836.5. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador enejes <strong>de</strong> flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> tensión, estimador <strong>de</strong> R R yT s ¡ 0¢ 5 ms. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 856.6. Evolución <strong>de</strong> la estimación <strong>de</strong> R R , <strong>de</strong> su factor <strong>de</strong> correlación y <strong>de</strong> laactualización <strong>de</strong> los parámetros. . . . . . . . . . . . . . . . . . . . . . . 866.7. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador integradocon el controlador Lyapunov-Integral. T s ¡ 0¢ 5 ms. . . . . . . . . . 896.8. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador concambio <strong>de</strong> variable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 976.9. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador concambio <strong>de</strong> variable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 986.10. Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador sincambio <strong>de</strong> variable. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 997.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l banco <strong>de</strong> ensayos . . . . . . . . . . . . . . . . 1027.2. Inversor trifásico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.3. Conexión <strong>de</strong> la carga al inversor. . . . . . . . . . . . . . . . . . . . . . . 1047.4. Tensiones generadas en ejes d-q. . . . . . . . . . . . . . . . . . . . . . . 1057.5. Diagrama <strong>de</strong> bloques <strong>de</strong>l circuito. . . . . . . . . . . . . . . . . . . . . . 1077.6. Salidas <strong>de</strong> un enco<strong>de</strong>r incremental. . . . . . . . . . . . . . . . . . . . . . 1097.7. Diagrama <strong>de</strong> bloques <strong>de</strong>l circuito <strong>de</strong> interfaz con el enco<strong>de</strong>r incremental. . 1117.8. Diagrama <strong>de</strong> bloques <strong>de</strong>l sistema operativo RT-Linux. . . . . . . . . . . . 1137.9. Diagrama <strong>de</strong> bloques <strong>de</strong>l programa <strong>de</strong> control. . . . . . . . . . . . . . . . 1157.10. Diagrama <strong>de</strong> flujo <strong>de</strong>l programa <strong>de</strong> control. . . . . . . . . . . . . . . . . 1157.11. Diagrama <strong>de</strong> flujo <strong>de</strong> la función <strong>de</strong> control no lineal. . . . . . . . . . . . . 1167.12. Diagrama <strong>de</strong> flujo <strong>de</strong>l estimador <strong>de</strong> flujo. . . . . . . . . . . . . . . . . . . 1177.13. Diagrama <strong>de</strong> flujo <strong>de</strong>l estimador <strong>de</strong> resistencia <strong>de</strong> rotor. . . . . . . . . . . 1188.1. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral. Eje x en seg. Eje y en W b y en rad el s. . . . . . . . . . . . . . . . . 1228.2. Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador Lyapunov-Integral. Eje x enseg. Eje y en A y en rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . 1228.3. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral diseñado para J ¡ 0¢ 005kgr¤ m 2 Eje x en seg. Eje y en W b y en rad el s.123
XXÍndice <strong>de</strong> Figuras¡ 0¢ 005kgr¤¡ 0¢ 005kgr¤¡ 0¢ 005kgr¤8.4. Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador Lyapunov-Integral diseñadopara J m 2 . Eje x en seg. Eje y en A y en rad el s. . . . . . . . . 1238.5. Evolución <strong>de</strong> la estimación <strong>de</strong> R R y <strong>de</strong> su factor <strong>de</strong> correlación. . . . . . . 1248.6. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialdirecto. Eje x en seg. Eje y en W b y en rad el s. . . . . . . . . . . . . . . . . 1268.7. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialdirecto diseñado para J m 2 Eje x en seg. Eje y en W b y en rad el s.1278.8. Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial directo diseñadopara J m 2 . Eje x en seg. Eje y en A y en rad el s. . . . . . . . . 1278.9. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialindirecto. Eje x en seg. Eje y en W b y en rad el s. . . . . . . . . . . . . . . . 1288.10. Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial indirecto. Eje x enseg. Eje y en A y en rad el s. . . . . . . . . . . . . . . . . . . . . . . . . . 1298.11. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialindirecto diseñado para J ¡ 0¢ 005kgr ¤ m 2 . Eje x en seg. Eje y en W b y enrad el s. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1298.12. Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial indirecto diseñadopara J ¡ 0¢ 005kgr¤ m 2 . Eje x en seg. Eje y en A y en rad el s. . . . . . . . . 1308.13. Potencia consumida por la máquina <strong>de</strong> inducción. Eje x en seg. Eje y en W . . 1318.14. Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral con minimización <strong>de</strong> pérdidas. Eje x en seg. Eje y en Wb y en rad el s.132A.1. Transformación <strong>de</strong> Park . . . . . . . . . . . . . . . . . . . . . . . . . . . 144A.2. Circuito equivalente en régimen permanente <strong>de</strong>l motor <strong>de</strong> inducción . . . 148A.3. Circuito equivalente en régimen permanente simplificado <strong>de</strong>l motor <strong>de</strong>inducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149D.1. Tensiones generadas en ejes d-q. . . . . . . . . . . . . . . . . . . . . . . 155D.2. Selección <strong>de</strong> la región <strong>de</strong> u S . Conexión en estrella . . . . . . . . . . . . . 156D.3. Selección <strong>de</strong> la región <strong>de</strong> u S . Conexión en triángulo . . . . . . . . . . . . 156G.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l controlador con estrategia <strong>de</strong> minimización <strong>de</strong>pérdidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164G.2. Diagrama <strong>de</strong> bloques <strong>de</strong>l cálculo <strong>de</strong> i r Sd r . . . . . . . . . . . . . . . . . . . 165
Nomenclaturaα Ángulo <strong>de</strong>l vector <strong>de</strong> flujo radỹ iˆxλError <strong>de</strong> seguimiento <strong>de</strong> la salida iValor estimado <strong>de</strong> xFactor <strong>de</strong> olvidoψ Módulo <strong>de</strong>l vector <strong>de</strong> flujo Wbψ r Referencia <strong>de</strong>l módulo <strong>de</strong>l vector <strong>de</strong> flujo WbABFGMatriz <strong>de</strong> estado en tiempo continuoMatriz <strong>de</strong> estado en tiempo continuoMatriz <strong>de</strong> estado en tiempo discretoMatriz <strong>de</strong> estado en tiempo discretox¢ Matriz <strong>de</strong> <strong>de</strong>sacoploE¡K Matriz <strong>de</strong> ganancias <strong>de</strong>l observadorX£££ Norma-2 <strong>de</strong>l vector X£££ω C Velocidad <strong>de</strong> giro genérica <strong>de</strong> los ejes d-q rad el£ sω R Velocidad mecánica rad el£ sω S Velocidad síncrona rad el£ sψ r RdFlujo <strong>de</strong> rotor en eje d <strong>de</strong> flujo <strong>de</strong> rotor Wbψ s RdFlujo <strong>de</strong> rotor en eje d <strong>de</strong> estator Wbψ r Rq Flujo <strong>de</strong> rotor en eje q <strong>de</strong> flujo <strong>de</strong> rotor Wbψ s Rq Flujo <strong>de</strong> rotor en eje q <strong>de</strong> estator Wbψ c RdFlujo <strong>de</strong> rotor en eje d genérico Wbψ c Rq Flujo <strong>de</strong> rotor en eje q genérico Wby rVector <strong>de</strong> los valores <strong>de</strong> referencia
σ Factor <strong>de</strong> dispersión 1¡MXXIINomenclatura2L S L R¢ỹa TuxyVector <strong>de</strong> los errores <strong>de</strong> seguimientoTranspuesta <strong>de</strong>l vector aVector <strong>de</strong> entradasVector <strong>de</strong> estadoVector <strong>de</strong> salidasABC DE F G Elementos <strong>de</strong> las matrices <strong>de</strong>l mo<strong>de</strong>lo en variables <strong>de</strong> estado <strong>de</strong> la máquina<strong>de</strong> inducciónB 1 Rozamiento viscoso N£ m£ s£ radI iGanancia <strong>de</strong>l controlador Lyapunov-Integralkgr£kgr£i c SdCorriente <strong>de</strong> estator en eje d genérico Ai r SdCorriente <strong>de</strong> estator en eje d <strong>de</strong> flujo <strong>de</strong> rotor Ai s SdCorriente <strong>de</strong> estator en eje d <strong>de</strong> estator Ai c SqCorriente <strong>de</strong> estator en eje q genérico Ai r SqCorriente <strong>de</strong> estator en eje q <strong>de</strong> flujo <strong>de</strong> rotor Ai s SqCorriente <strong>de</strong> estator en eje q <strong>de</strong> estator AJ Inercia <strong>de</strong>l accionamiento m 2J mod Inercia <strong>de</strong>l mo<strong>de</strong>lo <strong>de</strong>l accionamiento m 2K Ik iK Pk awiK IωK IψK PωK PψL r f hGanancia <strong>de</strong> la acción integral <strong>de</strong>l control <strong>de</strong> corrienteGanancia <strong>de</strong>l controlador <strong>de</strong> Lyapunov para la salida iGanancia <strong>de</strong> la acción proporcional <strong>de</strong>l control <strong>de</strong> corrienteGanancia <strong>de</strong> anti-windup para la salida iGanancia <strong>de</strong> la acción integral <strong>de</strong>l control <strong>de</strong> velocidad <strong>de</strong>l controlador vectorialdirectoGanancia <strong>de</strong> la acción integral <strong>de</strong>l control <strong>de</strong> flujo <strong>de</strong>l controlador vectorial directoGanancia <strong>de</strong> la acción proporcional <strong>de</strong>l control <strong>de</strong> velocidad <strong>de</strong>l controlador vectorialdirectoGanancia <strong>de</strong> la acción proporcional <strong>de</strong>l control <strong>de</strong> flujo <strong>de</strong>l controlador vectorialdirectoDerivada <strong>de</strong> Lie <strong>de</strong> or<strong>de</strong>n r <strong>de</strong> la función h con respecto al campo vectorial f
y r¡NomenclaturaXXIIIL R Inductancia <strong>de</strong> rotor HL S Inductancia <strong>de</strong> estator HM Inductancia mutua rotor-estator HN£N£m e Par electromagnético mm l Par <strong>de</strong> carga mP Número <strong>de</strong> polos <strong>de</strong> la máquinaP cu Pérdidas óhmicas en la máquina WrGrado relativo total <strong>de</strong>l sistemar iGrado relativo <strong>de</strong> la salida y iR R Resistencia <strong>de</strong> rotor ΩR S Resistencia <strong>de</strong> estator ΩT s Periodo <strong>de</strong> muestreo su jValor <strong>de</strong> la entrada ju c SdTensión <strong>de</strong> alimentación en eje d genérico Vu r SdTensión <strong>de</strong> alimentación en eje d <strong>de</strong> flujo <strong>de</strong> rotor Vu s SdTensión <strong>de</strong> alimentación en eje d <strong>de</strong> estator Vu c SqTensión <strong>de</strong> alimentación en eje q genérico Vu r Sq Tensión <strong>de</strong> alimentación en eje q <strong>de</strong> flujo <strong>de</strong> rotor Vu s SqTensión <strong>de</strong> alimentación en eje q <strong>de</strong> estator Vv iV tx rx sEntrada i al sistema lineal resultante <strong>de</strong> la linealización exactaFunción <strong>de</strong> LyapunovMagnitud en coor<strong>de</strong>nadas <strong>de</strong> flujo <strong>de</strong> rotorMagnitud en coor<strong>de</strong>nadas <strong>de</strong> estatorDerivada <strong>de</strong> or<strong>de</strong>n r <strong>de</strong> yy iValor <strong>de</strong> la salida iω Rr Referencia <strong>de</strong> la velocidad <strong>de</strong> rotor rad el£ si r SxrReferencia <strong>de</strong> la corriente i r SxAy irValor <strong>de</strong> referencia <strong>de</strong> la salida i
XXIVNomenclatura
Capítulo 1IntroducciónEn esta tesis se estudia la aplicación <strong>de</strong> técnicas <strong>de</strong> control no lineal para el control<strong>de</strong> flujo y velocidad <strong>de</strong> una máquina <strong>de</strong> inducción. Se <strong>de</strong>muestra que si bien estas técnicasdan buenos resultados cuando se simulan en tiempo continuo, su aplicación prácticaen tiempo discreto pue<strong>de</strong> ser problemática. Para conseguir un buen comportamiento entiempo discreto se ha <strong>de</strong>sarrollado un controlador no lineal basado en una función <strong>de</strong>Lyapunov <strong>de</strong> los errores <strong>de</strong> seguimiento y sus integrales, mostrándose su buen comportamientoen el banco <strong>de</strong> ensayos <strong>de</strong>l Laboratorio <strong>de</strong> Accionamientos Eléctricos. Por últimose ha <strong>de</strong>mostrado que el controlador vectorial directo es en realidad un controladorno lineal ad-hoc, con un comportamiento similar al controlador no lineal <strong>de</strong>sarrollado enesta tesis. En el trabajo realizado han quedado claras las diferencias y similitu<strong>de</strong>s entrelos controladores no lineales propuestos y el control vectorial directo.1.1. Motivación y antece<strong>de</strong>ntesEl control <strong>de</strong>l motor <strong>de</strong> inducción es un problema complejo <strong>de</strong>bido a varios motivos.En primer lugar la planta es un sistema no lineal. En segundo lugar el sistema es multivariabley dos <strong>de</strong> sus variables <strong>de</strong> estado son difíciles <strong>de</strong> medir, por lo que han <strong>de</strong> serestimadas. Por último, algunos <strong>de</strong> sus parámetros (principalmente la resistencia <strong>de</strong>l rotor)varían durante la operación <strong>de</strong> la máquina. Estas características, junto con la indudableimportancia <strong>de</strong> este tipo <strong>de</strong> máquinas en la industria, han originado un importante esfuerzoinvestigador en estos últimos años. Un campo muy activo recientemente ha sidola aplicación <strong>de</strong> técnicas <strong>de</strong> control no lineal (Isidori, 1995) (Slotine y Li, 1991) (Khalil,1996) para intentar conseguir accionamientos <strong>de</strong> altas prestaciones (Taylor, 1994) (Dawsonet al., 1998). En esta tesis se realiza un estudio comparativo entre varias técnicas <strong>de</strong>control no lineal cuando se aplican a la máquina <strong>de</strong> inducción y se aportan solucionespara su implantación práctica en tiempo discreto.Una <strong>de</strong> las primeras técnicas <strong>de</strong> control no lineal aplicadas al motor <strong>de</strong> inducciónfue la linealización entrada-salida. Esta técnica se basa en la aplicación <strong>de</strong> una realimentaciónno lineal para transformar la planta original en un sistema lineal que pue<strong>de</strong>ser controlado mediante técnicas <strong>de</strong> control clásico, tal como se pue<strong>de</strong> apreciar en el diagrama<strong>de</strong> bloques <strong>de</strong> la figura 1.1. Sin embargo, en las ecuaciones <strong>de</strong> la realimentaciónno lineal intervienen tanto los parámetros <strong>de</strong> la máquina como sus variables <strong>de</strong> estado.
2 IntroducciónTransformación no linealSistema linealv 1y 1L r 1h 1¡ x¢ u ẋ ¡ f ¡ x¢¢f¡ h¡ x¢ yG¡ x¢ uyv mE¡ x¢¡ 1y mL r mh f m x¢ ¡xPIy mrPIy 1rFigura 1.1: Diagrama <strong>de</strong> bloques <strong>de</strong>l controlador mediante linealización entrada-salida.Los valores <strong>de</strong> referencia se han <strong>de</strong>notado mediante el subíndice r.Por ello, en (Marino et al., 1993), don<strong>de</strong> se presenta un controlador basado en esta técnicaaplicado a un motor <strong>de</strong> inducción mo<strong>de</strong>lado en ejes <strong>de</strong> estator, ha <strong>de</strong> adaptarse laresistencia <strong>de</strong> rotor para mantener las prestaciones <strong>de</strong>l controlador cuando ésta varía. Noobstante, conviene <strong>de</strong>stacar que, aunque los resultados mostrados en dicho artículo sonexcelentes, éstos se han obtenido mediante simulación en tiempo continuo. Como punto<strong>de</strong> partida, en esta tesis se ha <strong>de</strong>sarrollado un controlador como el <strong>de</strong>scrito en (Marinoet al., 1993) y se ha implantado en tiempo discreto con un periodo <strong>de</strong> muestreo <strong>de</strong> 1 ms.Los resultados obtenidos han sido <strong>de</strong>cepcionantes, ya que el sistema presenta gran<strong>de</strong>serrores en régimen permanente y existe un fuerte acoplamiento entre el control <strong>de</strong> flujo yel <strong>de</strong> velocidad. Este funcionamiento anómalo se <strong>de</strong>be a que la realimentación no linealusada para transformar la planta original en un sistema lineal <strong>de</strong>pen<strong>de</strong> <strong>de</strong> las variables<strong>de</strong> estado <strong>de</strong> la máquina y éstas varían incluso en régimen permanente. Recuér<strong>de</strong>se queestas variables son magnitu<strong>de</strong>s senoidales <strong>de</strong> frecuencia igual a la <strong>de</strong> la alimentación <strong>de</strong>la máquina. Como dicha realimentación no lineal permanece constante durante todo elperiodo <strong>de</strong> muestreo, la cancelación <strong>de</strong> las nolinealida<strong>de</strong>s <strong>de</strong> la planta <strong>de</strong>ja <strong>de</strong> ser váliday con ello la aplicación <strong>de</strong>l controlador.Uno <strong>de</strong> los pocos trabajos en los que se realiza una aplicación experimental <strong>de</strong> estatécnica es (Raumer et al., 1994), en don<strong>de</strong> para conseguir una implantación aceptableen tiempo discreto <strong>de</strong>l controlador, se realiza un compensación adicional para tener encuenta el giro <strong>de</strong>l vector <strong>de</strong> flujo durante el periodo <strong>de</strong> muestreo, obteniéndose resultadosaceptables 1 para periodos <strong>de</strong> muestreo <strong>de</strong> 1 ms.1 Prácticamente iguales a los obtenidos con un controlador vectorial indirecto, según se muestra en dicho
1.1 Motivación y antece<strong>de</strong>ntes 3En esta tesis se plantea un método alternativo, consistente en la aplicación <strong>de</strong>l controladormediante linealización entrada-salida mo<strong>de</strong>lando el motor <strong>de</strong> inducción en ejes<strong>de</strong> flujo <strong>de</strong> rotor. En este sistema <strong>de</strong> referencia las variables <strong>de</strong> estado <strong>de</strong> la máquina sonmagnitu<strong>de</strong>s continuas en régimen permanente 2 y el resultado <strong>de</strong> la transformación nolineal no cambia excesivamente durante el periodo <strong>de</strong> muestreo. Por tanto, es previsibleque el error producido sea ahora mucho menor en la implantación en tiempo discreto. Sinembargo en las simulaciones realizadas se ha observado que aún se produce un error <strong>de</strong>seguimiento en régimen permanente y un acoplamiento entre los lazos <strong>de</strong> control <strong>de</strong> flujoy <strong>de</strong> velocidad. Estos errores se reducen al aumentar la frecuencia <strong>de</strong> muestreo, <strong>de</strong>bidoa que dicho aumento conlleva un menor error en la transformación no lineal durante elperiodo <strong>de</strong> muestreo.Para mejorar las prestaciones <strong>de</strong>l accionamiento se ha estudiado otra técnica <strong>de</strong> controlno lineal presentada en (Marino et al., 1996) con la que los autores obtienen unasbuenas prestaciones en la aplicación en tiempo discreto. Esta técnica se basa en la <strong>de</strong>finición<strong>de</strong> una función <strong>de</strong> Lyapunov <strong>de</strong> los errores <strong>de</strong> seguimiento que el controlador haceten<strong>de</strong>r a cero con una dinámica conocida. En teoría, el uso <strong>de</strong> la función <strong>de</strong> Lyapunovhace al sistema más robusto frente a perturbaciones, efectos <strong>de</strong>l muestreo y errores <strong>de</strong>mo<strong>de</strong>lado. Sin embargo en el capítulo 3 se <strong>de</strong>muestra que cuando existen errores en laestimación <strong>de</strong>l par <strong>de</strong> carga, el error <strong>de</strong> seguimiento <strong>de</strong> la velocidad es inversamenteproporcional a la inercia <strong>de</strong>l accionamiento, mostrándose mediante simulación que enaccionamientos <strong>de</strong> baja inercia el error producido es significativo. Conviene <strong>de</strong>stacar quepara po<strong>de</strong>r implantar este controlador, es necesario utilizar un inversor fuente <strong>de</strong> tensióncontrolado en corriente. Esto hace que al eliminar la dinámica <strong>de</strong>l estator <strong>de</strong>l controladorno lineal, éste sea más simple. De hecho se <strong>de</strong>muestra que el controlador diseñado esprácticamente igual a un controlador mediante linealización entrada-salida diseñado parauna máquina controlada en corriente. Por tanto el buen comportamiento <strong>de</strong>l controladorse <strong>de</strong>be, aparte <strong>de</strong> al uso <strong>de</strong> una función <strong>de</strong> Lyapunov, a esta simplificación <strong>de</strong>l sistemano lineal a controlar.Con el objetivo <strong>de</strong> hacer el sistema <strong>de</strong> control más robusto frente a los parámetros <strong>de</strong>la carga, en esta tesis se propone, inspirado en las técnicas <strong>de</strong> control lineal clásico, lamodificación <strong>de</strong> la función <strong>de</strong> Lyapunov para incluir un término <strong>de</strong>pendiente <strong>de</strong> la integral<strong>de</strong> los errores <strong>de</strong> seguimiento <strong>de</strong> las salidas. Con esta técnica, que se <strong>de</strong>nominará en estetrabajo control “Lyapunov-Integral”, se consigue un accionamiento con una excelenterespuesta dinámica y robusto frente a las variaciones <strong>de</strong> los parámetros <strong>de</strong> la carga, lo cualse muestra tanto con resultados <strong>de</strong> simulación en tiempo discreto como con resultadosexperimentales obtenidos en un banco <strong>de</strong> ensayos.Por último, con el fin <strong>de</strong> po<strong>de</strong>r comparar las técnicas no lineales propuestas con lassoluciones tradicionales para el control <strong>de</strong> máquinas <strong>de</strong> inducción, se han implantadodos controladores vectoriales, uno directo y otro indirecto. En el primero, propuesto por(Blaschke, 1972), se realiza un cambio <strong>de</strong> coor<strong>de</strong>nadas a ejes <strong>de</strong> flujo <strong>de</strong> rotor y se aplicauna realimentación no lineal diseñada ad-hoc para linealizar el sistema. Este controladorse pue<strong>de</strong> ver por tanto como una aplicación no sistemática <strong>de</strong> las técnicas <strong>de</strong> linealizaciónartículo.2 En un sistema <strong>de</strong> referencia solidario al flujo <strong>de</strong> rotor, la máquina <strong>de</strong> inducción se comporta <strong>de</strong> una maneraparecida a la máquina continua, tal como se <strong>de</strong>muestra en (Blaschke, 1972). En este trabajo se usará el término<strong>de</strong> magnitud continua para <strong>de</strong>signar a este tipo <strong>de</strong> variables en contraposición al concepto <strong>de</strong> magnitud alterna.
4 Introducciónexacta. Sin embargo, al contrario que en la aplicación sistemática, en la que la transformaciónno lineal empleada para linealizar el sistema cancela todos los términos, linealesy no lineales, convirtiendo el sistema en un sistema lineal en forma normal (Isidori,1995); en el controlador vectorial se cancelan sólo los términos no lineales, con lo quela transformación resultante es más sencilla y resulta ser menos sensible a los efectos <strong>de</strong>lmuestreo. El resultado es un comportamiento igual o marginalmente mejor que el ofrecidopor el controlador Lyapunov-Integral. El controlador indirecto, sin embargo, aunquees muy usado en la práctica <strong>de</strong>bido a su facilidad <strong>de</strong> implantación (Murphy y Turnbull,1988), presenta un comportamiento dinámico mucho peor, ya que tanto el flujo <strong>de</strong> rotorcomo el par se controlan en bucle abierto. Debido a esto, el uso <strong>de</strong> este controlador noes aconsejable cuando se requiere un buen comportamiento dinámico <strong>de</strong>l accionamiento,sobretodo si la inercia <strong>de</strong>l accionamiento es baja y se producen transitorios con una granaceleración.1.2. Organización <strong>de</strong> la exposiciónEn el capítulo 2 se exponen las técnicas <strong>de</strong> linealización entrada-salida y se aplicana una máquina <strong>de</strong> inducción, tanto en ejes <strong>de</strong> estator como en ejes <strong>de</strong> flujo <strong>de</strong> rotor. Mediantesimulación se muestra que si bien en ambos casos el comportamiento <strong>de</strong>l sistemaimplantado en tiempo continuo es totalmente satisfactorio, consiguiéndose un control<strong>de</strong>sacoplado <strong>de</strong>l flujo <strong>de</strong> rotor y <strong>de</strong> la velocidad; la implantación en tiempo discreto esproblemática.En el capítulo 3 se presenta un controlador basado en una función <strong>de</strong> Lyapunov <strong>de</strong> loserrores <strong>de</strong> seguimiento <strong>de</strong>l flujo y <strong>de</strong> la velocidad. El controlador se aplica a una máquina<strong>de</strong> inducción mo<strong>de</strong>lada en ejes <strong>de</strong> estator y en ejes <strong>de</strong> flujo <strong>de</strong> rotor. En ambos casoses necesario usar una máquina controlada en corriente. A<strong>de</strong>más se <strong>de</strong>muestra mediantesimulación que la implantación en ejes <strong>de</strong> flujo <strong>de</strong> rotor es más ventajosa al requerir unamenor velocidad <strong>de</strong> los reguladores <strong>de</strong> corriente.En el capítulo 4 se <strong>de</strong>sarrolla una mejora al controlador presentado en el capítulo 3consistente en añadir una integral <strong>de</strong> los errores <strong>de</strong> seguimiento a la función <strong>de</strong> Lyapunov.El controlador resultante es robusto frente a cambios en los parámetros <strong>de</strong> la carga, lo cualse muestra mediante simulación.En el capítulo 5 se expone un controlador vectorial directo. Dicho controlador seaplica a una máquina alimentada con un inversor fuente <strong>de</strong> tensión controlado en corrientepara po<strong>de</strong>r compararlo con el controlador Lyapunov-Integral <strong>de</strong>sarrollado en elcapítulo 4. Se muestra que los comportamientos <strong>de</strong> ambos controladores son prácticamenteiguales, justificándose este resultado mediante una comparación entre las ecuaciones<strong>de</strong> ambos controladores. Se concluye que, aunque las estructuras <strong>de</strong> ambos controladoresson parecidas, el controlador Lyapunov-Integral se basa en cancelar medianterealimentación exacta una serie <strong>de</strong> términos, lineales y no lineales, <strong>de</strong> las ecuaciones <strong>de</strong>la máquina. De esta forma se consigue <strong>de</strong>sacoplar el control <strong>de</strong> flujo <strong>de</strong>l <strong>de</strong> velocidad yse hace evolucionar el sistema en lazo cerrado según una dinámica preestablecida. Por elcontrario, en el controlador vectorial sólo se cancelan los términos no lineales y se diseñaun regulador lineal en tiempo discreto mediante asignación <strong>de</strong> polos para controlarel sistema lineal resultante, lo que lo hace un poco más robusto frente a errores en los
1.2 Organización <strong>de</strong> la exposición 5parámetros y a los efectos <strong>de</strong>l muestreo.En el capítulo 6 se presentan una serie <strong>de</strong> estimadores <strong>de</strong>l flujo <strong>de</strong> rotor, necesariospara la aplicación <strong>de</strong> los controladores expuestos en los capítulos 2, 3, 4 y 5. Se comienzapor los estimadores más sencillos en lazo abierto, los cuales presentan como inconvenienteuna velocidad <strong>de</strong> convergencia limitada y una gran sensibilidad frente a errores enlos parámetros. Para mejorar las prestaciones <strong>de</strong> estos estimadores se propone el uso <strong>de</strong>un estimador <strong>de</strong> resistencia <strong>de</strong> rotor. Otra alternativa investigada es el diseño conjunto<strong>de</strong> un controlador Lyapunov-Integral junto con un estimador, <strong>de</strong> forma que la función <strong>de</strong>Lyapunov garantice la convergencia a cero tanto <strong>de</strong> los errores <strong>de</strong> seguimiento como <strong>de</strong>los <strong>de</strong> estimación (Marino et al., 1996). Sin embargo se muestra mediante simulación queel controlador diseñado es inestable, salvo que se <strong>de</strong>sprecie el efecto <strong>de</strong>l estimador en elcontrolador <strong>de</strong> Lyapunov, que es lo que se hace, aunque no se dice claramente, en (Marinoet al., 1996). Por último se presenta un observador <strong>de</strong> or<strong>de</strong>n reducido <strong>de</strong>l flujo <strong>de</strong> rotormuy común en la literatura. Se muestra que <strong>de</strong>bido a que en su <strong>de</strong>sarrollo se supone quela velocidad <strong>de</strong> giro <strong>de</strong> la máquina es constante durante el periodo <strong>de</strong> muestreo, su comportamientoes inestable en accionamientos <strong>de</strong> baja inercia durante los transitorios conuna gran aceleración. Para solucionar este problema se propone una formulación alternativaen tiempo discreto en la que no es necesario realizar dicha suposición, mostrándosemediante simulación el buen comportamiento <strong>de</strong>l estimador propuesto.En el capítulo 7 se <strong>de</strong>scribe la plataforma experimental usada para validar los resultadosprincipales <strong>de</strong> esta tesis, haciendo especial énfasis en la tarjeta <strong>de</strong> modulación PWMy <strong>de</strong> medida <strong>de</strong> velocidad <strong>de</strong>sarrollada por el autor.En el capítulo 8 se presentan los resultados experimentales obtenidos en el banco <strong>de</strong>ensayos. Se ha evaluado el efecto <strong>de</strong> los errores en la inercia <strong>de</strong>l accionamiento tanto enel controlador Lyapunov-Integral como en el controlador vectorial directo, mostrándoseque ambos controladores presentan prácticamente el mismo comportamiento, si bien paragran<strong>de</strong>s variaciones <strong>de</strong> la inercia el accionamiento con el controlador Lyapunov-Integralse hace inestable mientras que el controlador vectorial directo es capaz <strong>de</strong> controlar elsistema. También se ha ensayado un controlador vectorial indirecto, mostrándose que sucomportamiento dinámico es mucho peor que el <strong>de</strong> los otros dos controladores, llegandoa hacerse inestable en los transitorios con aceleración gran<strong>de</strong> al per<strong>de</strong>r la orientación alcampo. En estas circunstancias merece la pena la implantación <strong>de</strong> las otras alternativasanalizadas, aunque dicha implantación sea más compleja. Por último se ha realizado unensayo con la máquina <strong>de</strong> inducción funcionando como generador y otro en el que seha aplicado una estrategia <strong>de</strong> minimización <strong>de</strong> pérdidas óhmicas, <strong>de</strong>mostrándose que elcontrolador Lyapunov-Integral es estable en ambos modos <strong>de</strong> funcionamiento.Por último, en el capítulo 9 se exponen las conclusiones <strong>de</strong> este trabajo, se resaltanlas aportaciones originales y se proponen las posibles líneas <strong>de</strong> trabajo futuras.Cierran la tesis una serie <strong>de</strong> apéndices en los que se ha incluido información adicionalque si bien no es imprescindible para la lectura <strong>de</strong> la tesis, si es importante para realizarun estudio en profundidad <strong>de</strong> ciertos aspectos. En el apéndice A se presentan los distintosmo<strong>de</strong>los <strong>de</strong>l motor <strong>de</strong> inducción usados a lo largo <strong>de</strong> esta tesis. En el apéndice B semuestran los parámetros <strong>de</strong> los motores usados en la tesis. Las herramientas matemáticasempleadas en el <strong>de</strong>sarrollo <strong>de</strong> los controladores no lineales se exponen en el apéndice C.En el apéndice D se <strong>de</strong>sarrolla el algoritmo para calcular los tiempos <strong>de</strong> conmutación <strong>de</strong>
6 Introduccióncada una <strong>de</strong> las ramas <strong>de</strong>l inversor para generar una tensión <strong>de</strong>terminada. En el apéndice Ese <strong>de</strong>talla el diseño <strong>de</strong> los reguladores <strong>de</strong> corriente cuando se consi<strong>de</strong>ra el retraso <strong>de</strong> unperiodo <strong>de</strong> muestreo originado por la velocidad finita <strong>de</strong>l or<strong>de</strong>nador para realizar los cálculos<strong>de</strong>l controlador. En el apéndice F se explica el <strong>de</strong>sarrollo <strong>de</strong>l controlador vectorialindirecto aplicado en el capítulo 8. Por último, en el apéndice G se expone el control conminimización <strong>de</strong> pérdidas aplicado en el capítulo 8.
Capítulo 2<strong>Control</strong> mediante linealizaciónexacta2.1. IntroducciónSi se tiene en cuenta que el motor <strong>de</strong> inducción es un sistema no lineal, parece naturalinvestigar la aplicación <strong>de</strong> técnicas <strong>de</strong> control no lineal con el objetivo <strong>de</strong> obtener lasmejores prestaciones <strong>de</strong>l accionamiento.Una <strong>de</strong> las técnicas <strong>de</strong> control no lineal más estudiadas en la literatura es la linealizaciónexacta mediante realimentación no lineal (Isidori, 1995) (Khalil, 1996) (Slotiney Li, 1991). Un controlador basado en esta metodología consta <strong>de</strong> dos lazos <strong>de</strong> realimentación:(a) un lazo interno que transforma el sistema original en un sistema linealmediante una realimentación no lineal <strong>de</strong> las variables <strong>de</strong> estado, y (b) un lazo externoque controla el sistema lineal resultante (véase la figura 1.1).En (Isidori, 1995) se presentan dos técnicas sistemáticas para conseguir linealizarexactamente un sistema. La primera <strong>de</strong> ellas consiste en una linealización entre las entradasy las variables <strong>de</strong> estado (linealización entrada-estado). La segunda realiza unalinealización entre las entradas y las salidas (linealización entrada-salida), entendiendopor salida cualquier función, lineal o no, <strong>de</strong> las variables <strong>de</strong> estado. El primer método esmás complejo y menos intuitivo <strong>de</strong> aplicar, pero presenta la ventaja <strong>de</strong> imponer menoresrestricciones al sistema para su aplicación. El segundo en cambio es más fácil <strong>de</strong> aplicarpero sólo es válido para sistemas <strong>de</strong> fase mínima (aquellos que tienen dinámicas <strong>de</strong> cero 1estables) (Taylor, 1994). Mediante ambos métodos es posible obtener, en <strong>de</strong>terminadascircunstancias, una transformación no lineal para linealizar al sistema.La linealización también pue<strong>de</strong> hacerse ad hoc a partir <strong>de</strong>l conocimiento <strong>de</strong>l sistema.Un ejemplo <strong>de</strong> este tipo <strong>de</strong> aplicación es el control vectorial clásico cuando se consi<strong>de</strong>rancomo salidas el flujo y la corriente <strong>de</strong> par. En (Leonhard, 1990) se <strong>de</strong>scompone el mo<strong>de</strong>loelectromagnético <strong>de</strong>l motor <strong>de</strong> inducción en dos subsistemas: flujo <strong>de</strong> rotor y corriente <strong>de</strong>par, que pue<strong>de</strong>n ser controlados <strong>de</strong> forma <strong>de</strong>sacoplada incluso cuando se usa un inversorfuente <strong>de</strong> tensión. Si se <strong>de</strong>sea controlar la velocidad o el par <strong>de</strong>l motor, este método sólopermite un control <strong>de</strong>sacoplado si se mantiene el flujo constante (Marino et al., 1993).1 Las dinámicas <strong>de</strong> cero (zero-dynamics en inglés) se <strong>de</strong>finen como la dinámica interna <strong>de</strong>l sistema cuandosus salidas se mantienen a cero por la acción <strong>de</strong> sus entradas (Slotine y Li, 1991).
8 <strong>Control</strong> mediante linealización exactaSin embargo los métodos sistemáticos presentados en (Isidori, 1995) permiten linealizarun mo<strong>de</strong>lo completo <strong>de</strong>l motor que incluya la ecuación mecánica, controlando elflujo y la velocidad (o el par) <strong>de</strong> forma <strong>de</strong>sacoplada, tal como se mostrará en este capítulo.En la Sección 2.2 se expone la técnica <strong>de</strong> linealización entrada-salida en un casogeneral y se establecen las condiciones que ha <strong>de</strong> cumplir un sistema para que dichatécnica <strong>de</strong> control sea aplicable. En la Sección 2.3 se aplica un controlador mediantelinealización entrada-salida a un motor <strong>de</strong> inducción mo<strong>de</strong>lado en ejes d-q <strong>de</strong> estator yse muestra mediante simulación que si bien su comportamiento en una implantación entiempo continuo es satisfactorio, su comportamiento cuando se implanta en tiempo discretoes inaceptable. Por último, en la Sección 2.4, se aplica un controlador mediante linealizaciónentrada-salida a un motor <strong>de</strong> inducción mo<strong>de</strong>lado en ejes d-q <strong>de</strong> flujo <strong>de</strong> rotor,mostrándose mediante simulación que el comportamiento en la implantación en tiempodiscreto mejora notablemente respecto al proporcionado por la implantación en ejes <strong>de</strong>estator, aunque el sistema necesita altas frecuencias <strong>de</strong> muestreo (10 kHz) para obtenerun control <strong>de</strong>sacoplado <strong>de</strong>l flujo y <strong>de</strong> la velocidad y errores <strong>de</strong> seguimiento pequeños.Debido precisamente a la alta frecuencia <strong>de</strong> muestreo necesaria, el controlador propuestono se ha implantado en el banco experimental. En sucesivos capítulos se presentan otrastécnicas alternativas <strong>de</strong> control no lineal que ofrecen un mejor comportamiento cuandose implantan en tiempo discreto con bajas frecuencias <strong>de</strong> muestreo.2.2. Linealización exacta entrada-salida mediante realimentación<strong>de</strong> sistemas con varias entradas y variassalidasConsidérese un sistema no lineal con el mismo número <strong>de</strong> entradas que <strong>de</strong> salidaspara simplificar el <strong>de</strong>sarrollo 2 :ddt x ¡ f¡ x¢¢G¡ x¢ u (2.1)y ¡ h¡ x¢ (2.2)don<strong>de</strong> x es el vector <strong>de</strong> las variables <strong>de</strong> estado ¡ n£ 1¢ , u es el vector <strong>de</strong> entrada ¡ m£ 1¢ ,y es el vector <strong>de</strong> salida ¡ m£ 1¢ , f y h son dos campos vectoriales 3 “suaves” 4 y G es unamatriz <strong>de</strong> ¡ n£ m¢ cuyas columnas son campos vectoriales “suaves” g i .Como primer paso para la linealización entrada-salida se <strong>de</strong>riva cada una <strong>de</strong> las salidasy i hasta que aparezca al menos una <strong>de</strong> las entradas u j . Si esto ocurre para la <strong>de</strong>rivada<strong>de</strong> or<strong>de</strong>n r i , entonces la <strong>de</strong>rivada y ir i ¡ vendrá dada por (Slotine y Li, 1991):y ir i ¡ ¡ L r if h i¡ x¢¢m∑j 1L g jL r i ¡ 1fh i ¡ x¢ u j (2.3)en don<strong>de</strong> L r h¡ x¢fes la <strong>de</strong>rivada <strong>de</strong> Lie5 <strong>de</strong>or<strong>de</strong>n r <strong>de</strong> la función h¡ x¢ con respecto al2 En (Isidori, 1995) se muestra como exten<strong>de</strong>r la metodología a sistemas con distinto número <strong>de</strong> entradasque <strong>de</strong> salidas.3 La <strong>de</strong>finición <strong>de</strong> campo vectorial se encuentra en el apéndice C4 Por función “suave” se entien<strong>de</strong> que la función y sus <strong>de</strong>rivadas parciales hasta un or<strong>de</strong>n suficientementeelevado son continuas.5 Véase el Apéndice C
¡¡¢¡¡¢£¥¤¤¡¡¢¡¡¢¡¡¢¤ £¤¡¡¢£¥¤¤¦¢£¥¤¤¤2.3 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 9campo vectorial f. Se dice entonces que y i presenta un grado relativo r i respecto a lasentradas u j .Repitiendo el proceso para cada una <strong>de</strong> las salidas se obtiene:yr 1 1 ¡.y mr m ¡¦¡L r 1fh 1 ¡ x¢.L r mfh m ¡ x¢don<strong>de</strong> la matriz E¡ x¢ , <strong>de</strong> dimensión m£ m, viene dada porL g1 L r 1 1fh 1 L g2 L r 1 1fh 1 ¡ ¡ §¨§©§ L gm L r 1 1fh 1.¡..¡ §¨§©§ L g1 L r m 1fh m L g2 L r m 1fh m L gm L r m 1Si E¡ x¢ es invertible, se pue<strong>de</strong> tomar como entrada para el sistema:u ¡ E¡ x¢¡ 1con lo cual el sistema original se convierte en:yr 1 1 ¡.y mr m ¡.v 1¡ L r 1fh 1 ¡ x¢.v m¡ L r mfh m ¡ x¢¦¡E¡ x¢ u (2.4)£ ¤.(2.5)¦fh m¦(2.6)£ ¤¤v 1.(2.7)¦v mComo la salida y i sólo se ve afectada por la entrada v i , a (2.6) se <strong>de</strong>nomina control <strong>de</strong><strong>de</strong>sacoplo, y a la E¡ x¢ matriz se le llama matriz <strong>de</strong> <strong>de</strong>sacoplo.El sistema (2.1–2.2) se dice que tiene un grado ¡ relativo r 1 §©§©§ ¢r 1¢¤ ¤ ¤¢r m se le <strong>de</strong>nomina grado relativo total. Si el grado relativo total <strong>de</strong>l sistema (2.1–r ¢ m y al escalar r ¡ ¢2.2) es igual al or<strong>de</strong>n <strong>de</strong>l sistema n, entonces la transformación (2.6) permite controlarel sistema completamente. Si en cambio el grado relativo total r es menor que n, existendinámicas ocultas (“zero dinamics”) que no se pue<strong>de</strong>n controlar. En este caso, aunqueel controlador mediante linealización entrada-salida garantiza la estabilidad <strong>de</strong> la partecontrolable <strong>de</strong>l sistema, no se pue<strong>de</strong> garantizar la estabilidad <strong>de</strong>l sistema completo sin unanálisis <strong>de</strong> las dinámicas ocultas que muestre su estabilidad (Slotine y Li, 1991).2.3. Aplicación <strong>de</strong> la linealización entrada-salida por realimentacióna la máquina <strong>de</strong> inducciónEn (Marino et al., 1993) se aplica un controlador mediante entrada-salida a la máquina<strong>de</strong> inducción y, aunque los resultados mostrados son muy buenos, estos sólo se hanobtenido mediante simulación en tiempo continuo. A continuación se <strong>de</strong>scribe la aplicación<strong>de</strong> esta técnica <strong>de</strong> control a la máquina <strong>de</strong> inducción, tal como se realiza en (Marinoet al., 1993), pero con vistas a su implantación en tiempo discreto en un banco <strong>de</strong>ensayos.En el Apéndice A se muestra que el mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes d-q fijosal estator, tomando como variables <strong>de</strong> estado las corrientes <strong>de</strong> estator i s Sd e is Sq, el flujo <strong>de</strong>
¡¡¡¢¤ £¤¤¡¡¡¢¢¤ £¤¦¢¢¤¡¡¡¢¤ £¤¦¤¢¡¡¡¢¢¤ £¤¦¤10 <strong>Control</strong> mediante linealización exactarotor ψ s Rd y ψs Rq y la velocidad mecánica expresada en radianes eléctricos por segundoω R , viene dado por las ecuaciones:A¤ ¡£¢x¤ ¡¥¢B¤ ¡£¢ddti s Sdi s Sqψ s Rdψ s Rq¦¡dω Rdt¡¡A 0 B Cω R0 A Cω R B¡ D 0 E ω R0 D ω R Ei s Sdi s Sqψ s Rdψ s RqF 00 F0 00 0u¦u s Sdu s (2.8)¡£¢ ¤Sq§¡ e¡ ¢G¡ Sq¡ ¡ Sd¢P2J m m l (2.9)m e ψ s Rd is ψ s Rq is (2.10)en don<strong>de</strong> A, B, C, D, E, F y G son funciones <strong>de</strong> los parámetros <strong>de</strong> la máquina, <strong>de</strong>finidosen (A.9), u s Sd y us Sqson las tensiones <strong>de</strong> alimentación en ejes d-q <strong>de</strong> estator, P es el número<strong>de</strong> pares <strong>de</strong> polos, J la inercia <strong>de</strong>l accionamiento y m l el par <strong>de</strong> carga.En la sección 2.2 se ha aplicado la linealización entrada-salida a sistemas con elmismo número <strong>de</strong> entradas que <strong>de</strong> salidas con el objetivo <strong>de</strong> reducir el sistema no linealoriginal a un conjunto <strong>de</strong> sistemas lineales con una entrada y una salida que no interactúanentre sí. El mo<strong>de</strong>lo <strong>de</strong>l motor consta <strong>de</strong> dos entradas u s Sd y us Sq. Por tanto es necesario<strong>de</strong>finir dos salidas que podrán ser controladas in<strong>de</strong>pendientemente por cada una <strong>de</strong> lasentradas. En un controlador <strong>de</strong> velocidad, aparte <strong>de</strong> <strong>de</strong>finir como salida esta variable, esconveniente elegir como segunda salida a controlar el módulo <strong>de</strong> flujo para:Mantenerlo a su valor nominal y así conseguir una mejor respuesta dinámica <strong>de</strong>laccionamiento (Leonhard, 1985).Po<strong>de</strong>r variar su valor y conseguir una mayor eficiencia energética <strong>de</strong>l accionamiento(Fernán<strong>de</strong>z Bernal, 2000).Mantener el control en la zona <strong>de</strong> <strong>de</strong>bilitamiento <strong>de</strong>l campo.Así, las salidas <strong>de</strong>l sistema se <strong>de</strong>finen como:y 1 ¡ ψ 2 ¡ ψ s Rd 2 ¢ψ s Rq 2 (2.11)y 2 ¡ ω R (2.12)don<strong>de</strong>, para evitar el realizar una raíz cuadrada, se ha tomado como salida el cuadrado<strong>de</strong>l módulo <strong>de</strong>l flujo.La <strong>de</strong>rivada <strong>de</strong>l cuadrado <strong>de</strong>l flujo, aplicando (2.3) a (2.11) y teniendo en cuenta (2.8),vendrá dada por:con:ddt y 1 ¡ddtψ 2 ¡ L f ψ 2 ¢ m∑j 1L g jψ 2 u j (2.13)L f ψ 2 ¡ 2ψ s Rd¨Di s SdEψ s Rd¡ ω R ψ s Rq©m∑j 12ψ s Rq¨Di s ¢Sqω R ψ s RdEψ s Rq©¡L g jψ 2 u j ¡2D¨ψ s Rd is Sd ψ s Rqi s Sq©¢2E ψ 2 (2.14)0 (2.15)
L f ω R ¡¢¢¢¢¢¢¢¢¢¢¢¢¢Cω R ψ sAi s Sq¡ CωRq©R ψ s Rd©¢¢¢¢2Di s Sd¢2Di s Sq©2.3 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 11Como no aparece la entrada u en la primera <strong>de</strong>rivada, es necesario volver a <strong>de</strong>rivar elcuadrado <strong>de</strong>l flujo:d 2dt 2 ψ 2 L 2 f ψ 2 m¢¡ L g jL f ψ 2 u j (2.16)con:∑j 1L 2 f ψ 2 ¡ 2Dψ s Rd¨Bψ s RdAi s Sd2Dψ s Rq¨Bψ s ¢Rq¨Eψ s RdDi s Sd¡ ω R ψ s Rq© ¡ 4Eψ s Rd¨Eψ s ¢RqDi s ¢Sqω R ψ s Rd©¨4Eψ s ¢Rq¡ ¡ 2AD ¢ 6DE¢¨ψ s Rd is Sdψ s Rq is Sq©¢2Dω R¨ψ s Rd is Sq¡ i s Sd ψs Rq©¢m∑j 1¨2BD 4E ψ 2©¢L g jL f ψ 2 u j ¡ 2DFψ s Rd us Sd2 ¢con lo cual el grado relativo <strong>de</strong> la salida ψ s R<strong>de</strong>s <strong>de</strong> dos.2D 2¨i 2 Sdi 2 Sq© (2.17)2DFψ s Rq us Sq (2.18)Repitiendo el proceso para la salida ω R se obtiene:ddt y 2 ¡ddt ω R ¡ L f ω R¢m∑j 1L g jω R u j (2.19)con:que usando (2.10) se transforma en:L f ω R ¡P2J ¡ m e¡ m l ¢ (2.20)P2J ¡ G¡ ψs Rd is Sq¡ ψ s Rq is Sd¢ ¡m l ¢ (2.21)y con:m∑j 1L g jω R u j ¡ 0 (2.22)Por tanto, al no aparecer la entrada u en la <strong>de</strong>rivada <strong>de</strong> la velocidad, hay que volver a<strong>de</strong>rivar, obteniendo:con:L 2 f ω R ¡d 2dt 2 ω R L 2 mf ω ¡ R ∑ L g jL f ω R u j (2.23)j 1¢PG ¡ i s2JSd¨Eψ s ¢Rq¡i s Sq¨Eψ s RdDi s ¢SqDi s Sd¡ ω R ψ s Rq©ω R ψ s Rd©ψ s Rd¨Bψ s ¢Rq¡ ψ s Rq¨Bψ s RdAi s Cω Sq¡ R ψ sAi s Sd CωRd©R ψ s ¢ Rq©¡ L f m l¢ (2.24)m∑j 1L g jω R u j ¡P2J FG¨ψ s Rd us Sq¡ ψ s Rqu s Sd© (2.25)
¦ψ¦ω¡P0 0§ψ¦ω¦x 1¤ ¡¥¢12 <strong>Control</strong> mediante linealización exactaPor tanto el grado relativo <strong>de</strong> la salida ω R es <strong>de</strong> dos, el grado relativo <strong>de</strong>l sistema (2.8-2.10) es <strong>de</strong> ¡ 2¢ 2¢ y su grado relativo total es r ¡ 4, que es menor <strong>de</strong>l or<strong>de</strong>n <strong>de</strong>l sistema¡ n ¡ 5¢ . Por tanto existen dinámicas ocultas (zero dinamics) que pue<strong>de</strong>n ser inestables,con lo que la estabilidad <strong>de</strong>l sistema completo no está garantizada.La matriz E¡ x¢ viene dada porE¡ x¢ ¡¦2DFψs Rd2DFψ s Rq2JFGψ s RqP(2.26)2J FGψs Rd§que es invertible salvo para flujo nulo. Por tanto, teniendo en cuenta (2.6), se pue<strong>de</strong> usarla transformación:u ¡ E¡ x¢¡ 1¦v 1¡ L 2 fψ 2v 2¡ L 2 f ω R§(2.27)Para transformar el sistema original (2.8–2.9) en el sistema lineal <strong>de</strong>sacoplado:ddt¦ddtψ 2ddt ω R§¦v 1v¡ (2.28)2§En don<strong>de</strong> con la entrada v 1 se podrá controlar el cuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo y con laentrada v 2 la velocidad, estando <strong>de</strong>sacoplados ambos subsistemas.2.3.1. Diseño <strong>de</strong>l controlador linealEl sistema resultante <strong>de</strong> la linealización entrada-salida por realimentación (2.28) secontrola mediante un regulador lineal. Como las variables a controlar son el flujo y lavelocidad, no sus <strong>de</strong>rivadas, y a<strong>de</strong>más ambos subsistemas están <strong>de</strong>sacoplados, la ecuación(2.28) se pue<strong>de</strong> transformar en:A 1¦0 1¤¡£¢B 1¦0¡£¢¤ddt2ddtψ¡ 2§2ddtψ 2§¢1 (2.29)ddtRddt ω R§¡¦0 1¤¡£¢0 0§Rddt ω ¡£¢ ¤R§¢¦0v¡£¢¤ 1§v1§2 (2.30)Para controlar cada uno <strong>de</strong> los subsistemas lineales pue<strong>de</strong> usarse un control proporcional,v i ¡ k T i e i con e i ¡ x i¡ ¡ x i ¢ r , siendo ¡ x i¢ r el valor <strong>de</strong> referencia <strong>de</strong> x i. k i se calculapara que el sistema:ddt e ¢i A ¡ isea estable. Por tanto el controlador completo se expresa:u ¡ E¡ x¢¡ 1¦B i k T e i¢ i (2.31)k T 1 e 1¡ L f2ψ 2k T 2 e 2¡ L f 2 ω R§(2.32)A 2x 2B 22.3.2. Detalles <strong>de</strong> implementaciónEn la figura 2.1 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong>l sistema <strong>de</strong> control <strong>de</strong>scritoen esta sección y que se ha implantado en un simulador durante el trabajo realizado paraesta tesis.
2.3 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 13ψ 2 rddtψ 2 rk 1v 1¡L 2 f ψ 2xx ¤ E¡ x¢¡ 1u s du s qdq/rstω Rrddt ω R rk 2xv 2L 2 f ω R ¡xxi s di s qdq/rsti Ri Sω Rψ s RFigura 2.1: Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamientoLos bloques “dq/rst” representan los cambios <strong>de</strong> coor<strong>de</strong>nadas <strong>de</strong> las magnitu<strong>de</strong>strifásicas a magnitu<strong>de</strong>s en ejes d-q <strong>de</strong> estator según se muestra en la sección A.1. Los bloques“k 1 ” y “k 2 ” representan los controladores lineales <strong>de</strong>sarrollados en la Sección 2.3.1,que como se pue<strong>de</strong> observar tienen como entradas el estado <strong>de</strong>l sistema x y los valores<strong>de</strong> referencia 6 <strong>de</strong>l cuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo ψ 2 r y la velocidad ω Rr junto con sus<strong>de</strong>rivadas. Los bloques “L 2 fψ ”, “L 2 f ω R” y “E¡ x¢¡ 1 ” representan la transformación nolineal. A<strong>de</strong>más se ha supuesto que se pue<strong>de</strong>n medir las corrientes <strong>de</strong> estator, la velocidadmecánica y el flujo <strong>de</strong> rotor.Por último, cabe <strong>de</strong>stacar que en el cálculo <strong>de</strong> L 2 f ω R según (2.24) interviene el términoL f m l , el cual, salvo que se conozca la dinámica <strong>de</strong> la carga, será <strong>de</strong>sconocido. Sinembargo, dado que dicha <strong>de</strong>rivada <strong>de</strong> Lie <strong>de</strong>l par <strong>de</strong> carga normalmente valdrá cero enrégimen permanente, en las simulaciones realizadas en la sección 2.3.3 se ha <strong>de</strong>spreciadoeste término en el cálculo <strong>de</strong>l controlador sin apreciar un comportamiento anómalo. Enlas referencias consultadas no se dice nada acerca <strong>de</strong>l tratamiento <strong>de</strong> este término en laaplicación práctica <strong>de</strong>l controlador.2.3.3. Resultados <strong>de</strong> simulaciónDebido a la existencia <strong>de</strong> dinámicas ocultas en el sistema, complejas <strong>de</strong> estudiaranalíticamente, la estabilidad <strong>de</strong>l sistema en bucle cerrado pue<strong>de</strong> investigarse por simulación.7 A<strong>de</strong>más no existen en la literatura propuestas analíticas para el análisis <strong>de</strong> estetipo <strong>de</strong> sistemas <strong>de</strong> control en tiempo discreto, por lo que la influencia <strong>de</strong>l periodo <strong>de</strong>muestreo también ha <strong>de</strong> investigarse mediante simulación.En las figuras 2.2, 2.3, 2.4 y 2.5 se muestran los resultados <strong>de</strong> la simulación <strong>de</strong>l motor<strong>de</strong>scrito según el mo<strong>de</strong>lo (2.8–2.9) con el controlador (2.32). El motor elegido para lasimulación es el que se ha usado en el banco experimental. Su potencia es <strong>de</strong> 250 Wy sus parámetros se muestran en el Apéndice B. Los controladores para los sistemas6 Los valores <strong>de</strong> referencia se <strong>de</strong>notan en este trabajo mediante el subíndice r.7 En (Isidori, 1995) se pue<strong>de</strong> ver algún procedimiento analítico para estudiar las zero dynamics <strong>de</strong>l sistema.
14 <strong>Control</strong> mediante linealización exacta1.2ψ0.80.4005101520254002000-200-4000510ω R152025Figura 2.2: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor con el controlador implantado en tiempocontinuo. Eje x en seg. Ejes y en W b 2 y rad el s.ψ1.61.20.80.40051015202550250-25-50-750510ω R152025Figura 2.3: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms. Eje x en seg. Ejes y en W b 2 y rad el s.situando los polosen el eje real <strong>de</strong> forma que las constantes <strong>de</strong> tiempo en bucle cerrado <strong>de</strong>l controlador<strong>de</strong> velocidad sean iguales a 1s y 0¢ 1s y las <strong>de</strong>l controlador <strong>de</strong> flujo a 0¢ 1s y 0¢ 01s. Lasrespuestas <strong>de</strong> ambos subsistemas se aproximarán por tanto a las <strong>de</strong> un sistema <strong>de</strong> primeror<strong>de</strong>n con constante <strong>de</strong> tiempo <strong>de</strong> 1s y 0¢ 1s respectivamente.lineales resultantes se han diseñado mediante asignación <strong>de</strong> polos, 88 Se ha usado para ello la función place <strong>de</strong>sarrollada por el autor para la toolbox <strong>de</strong> control <strong>de</strong> Octave.
2.3 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 15ψ2.421.61.20.80.400510152025225150750-75-150-2250510ω R152025Figura 2.4: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms. Eje x en seg. Ejes y en Wb 2 y rad 0¢ el s.Inicialmente se sitúa la referencia <strong>de</strong>l cuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo 9 1¢ en 1Wb 2 yla referencia <strong>de</strong> la velocidad en 300rad el£ s. 10 Las referencias <strong>de</strong> las <strong>de</strong>rivadas se hanpuesto a cero durante toda la simulación. El par <strong>de</strong> carga es proporcional a la velocidad0¢ con 001 Nmrad el scomo constante <strong>de</strong> proporcionalidad. A los 7 segundos se invierte lareferencia <strong>de</strong> velocidad provocando un cambio <strong>de</strong> sentido <strong>de</strong> giro en la máquina. A los14 segundos se da un escalón <strong>de</strong> par haciendo que la constante <strong>de</strong> proporcionalidad sea003 Nm 0¢rad el sen 0¢Nmlugar <strong>de</strong> 001rad el s . Por último en t 20s se disminuye la referencia ¡ <strong>de</strong>lcuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo a la mitad.En la Figura 2.2 se muestra la simulación <strong>de</strong>l sistema en tiempo continuo. Comopue<strong>de</strong> apreciarse, las salidas se estabilizan en sus valores <strong>de</strong> referencia en aproximadamentecinco constantes <strong>de</strong> tiempo, <strong>de</strong> acuerdo con el diseño propuesto para los controladores,estando perfectamente <strong>de</strong>sacoplados el control <strong>de</strong> flujo <strong>de</strong>l <strong>de</strong> velocidad. A<strong>de</strong>másel controlador <strong>de</strong> velocidad es muy robusto frente a variaciones en el par <strong>de</strong> carga, puesen t ¡ 14s, aunque el par varía un 200%, la perturbación <strong>de</strong> la velocidad es tan solo <strong>de</strong>l2¢ 9 %, que no se aprecia bien en la figura.Ahora bien, un controlador como el propuesto no pue<strong>de</strong> implantarse <strong>de</strong> forma analógica.Para implantar el controlador <strong>de</strong> forma digital, se ha discretizado el sistema lineal 11y se han diseñado los controladores discretos mediante asignación <strong>de</strong> polos, situándolosen un lugar equivalente al caso continuo. La ecuación <strong>de</strong> <strong>de</strong>sacoplo (2.27), en cambio, se<strong>de</strong>ja igual que en el caso continuo. Este controlador presenta un funcionamiento inaceptablepara periodos <strong>de</strong> muestreo <strong>de</strong>l or<strong>de</strong>n <strong>de</strong> T s ¡ 1ms tal como se muestra en la Figura2.3, don<strong>de</strong> se pue<strong>de</strong> apreciar que el error <strong>de</strong> seguimiento <strong>de</strong> la velocidad es <strong>de</strong> un 85%,9 El flujo nominal <strong>de</strong> la máquina es <strong>de</strong> 1¡ 05W b.10 El motor usado tiene 4 polos, con lo que 300rad el¢ s equivalen a 150rad¢ s (1432 r.p.m.).11 Para convertir el sistema continuo en su equivalente en tiempo discreto se ha usado una transformacióninvariante con retenedor <strong>de</strong> or<strong>de</strong>n cero en las entradas (Åström y Wittenmark, 1984).
16 <strong>Control</strong> mediante linealización exacta1.2ψ0.80.400510152025-100510ω R1520251050-5Figura 2.5: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s. Eje x en seg. Ejes y en W b 2 y rad el s.que existe un fuerte acoplamiento entre el controlador <strong>de</strong> velocidad y el <strong>de</strong> flujo y queel controlador <strong>de</strong> velocidad es menos robusto frente a variaciones <strong>de</strong>l par <strong>de</strong> carga. Si sebaja T s hasta 0¢ 1ms, el comportamiento <strong>de</strong>l controlador sigue siendo anómalo, tal comose pue<strong>de</strong> apreciar en la Figura 2.4, aunque ahora el error <strong>de</strong> seguimiento <strong>de</strong> la velocidadbaja hasta un 39%. En la Figura 2.5 se muestra la respuesta <strong>de</strong>l sistema cuando se sitúala referencia <strong>de</strong> velocidad en 30rad el£ s (143 r.p.m.) y el periodo <strong>de</strong> muestreo es <strong>de</strong> 1ms.La respuesta <strong>de</strong>l controlador <strong>de</strong> flujo es aceptable, aunque existe aun un gran error <strong>de</strong>seguimiento en régimen permanente <strong>de</strong> la velocidad.El comportamiento anómalo <strong>de</strong>l controlador en tiempo discreto se <strong>de</strong>be a que laecuación <strong>de</strong> <strong>de</strong>sacoplo (2.27) se mantiene constante durante todo el periodo <strong>de</strong> muestreo.Sin embargo, los elementos <strong>de</strong> dicha ecuación <strong>de</strong> E¡ x¢ <strong>de</strong>sacoplo, , L 2 fψ 2 y L 2 f ω R, <strong>de</strong>pen<strong>de</strong>n<strong>de</strong> las variables <strong>de</strong> estado <strong>de</strong> la máquina, tal como se pue<strong>de</strong> observar en las ecuaciones(2.26), (2.17) y (2.24). Por tanto si la variación <strong>de</strong> las variables <strong>de</strong> estado durante el periodo<strong>de</strong> muestreo es significativa, la aplicación <strong>de</strong> la transformación no lineal (2.27) enel sistema (2.8–2.9) no será equivalente al sistema lineal <strong>de</strong>sacoplado (2.28). Por ello aldisminuir el periodo <strong>de</strong> muestreo o la velocidad mecánica el comportamiento <strong>de</strong>l controladormejora notablemente, aunque no lo suficiente para que su aplicación práctica seaposible.Por último conviene <strong>de</strong>stacar que si se aumenta la inercia <strong>de</strong>l accionamiento, el comportamiento<strong>de</strong>l controlador <strong>de</strong> velocidad mejora apreciablemente. Por ejemplo si realizala misma simulación que la mostrada en la figura 2.5 pero aumentando la inercia <strong>de</strong>s<strong>de</strong>0¢ 01kgr¤ m 2 a 0¢ 1kgr¤ m 2 , se obtienen los resultados mostrados en la figura 2.6, don<strong>de</strong> lamejora <strong>de</strong>l comportamiento <strong>de</strong>l controlador es apreciable. Para explicar esta mejora bastacon observar que la última fila <strong>de</strong> E¡ x¢ (2.26) y la ecuación <strong>de</strong> L 2 f ω R (2.24) son inversamenteproporcionales a la inercia, con lo que si la inercia es pequeña, la influencia <strong>de</strong>estos términos <strong>de</strong> <strong>de</strong>sacoplo en el controlador será elevada. Por tanto, el error cometido al
2.3 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 171.2ψ0.80.4005101520253020100-10-20-300510ω R152025Figura 2.6: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s e inercia igual 0¢ a ¤ 1kgr m 2 . Eje x enseg. Ejes y en W b 2 y rad el s.ψ654321005101520253002001000-100-200-3000510ω R152025Figura 2.7: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms pero con inercia igual a 0¢ 1kgr¤ m 2 . Eje x en seg. Ejes y en W b 2 y rad el s.mantenerlos constantes durante el todo el periodo <strong>de</strong> muestreo será también muy elevado,provocando el funcionamiento anómalo <strong>de</strong>l controlador. No obstante conviene <strong>de</strong>stacarque aún cuando la inercia es elevada, el comportamiento <strong>de</strong>l controlador con periodos <strong>de</strong>muestreo elevados (T s ¡ 1ms) a altas velocida<strong>de</strong>s no es aceptable, tal como se muestraen la simulación <strong>de</strong> la figura 2.7, que se ha realizado en las mismas condiciones que lamostrada en la figura 2.3, pero con una inercia igual a 0¢ 1kgr¤ m 2 .
¡¢¡¢¦¡¢¦¢¡¢¦18 <strong>Control</strong> mediante linealización exacta2.4. Aplicación <strong>de</strong> la linealización entrada-salida por realimentacióna la máquina <strong>de</strong> inducción en ejes <strong>de</strong>flujo <strong>de</strong> rotorEn la sección 2.3.3 se ha visto que aplicación <strong>de</strong> la linealización entrada-salida a lamáquina <strong>de</strong> inducción en ejes <strong>de</strong> estator no proporciona resultados satisfactorios en tiempodiscreto <strong>de</strong>bido a que la transformación no lineal (2.27) varía apreciablemente a lolargo <strong>de</strong>l periodo <strong>de</strong> muestreo T s si las variables <strong>de</strong> estado <strong>de</strong> las que <strong>de</strong>pen<strong>de</strong> la transformacióntambién lo hacen. Para solucionar este problema en (Raumer et al., 1994) se avanzael vector <strong>de</strong> flujo en un ángulo igual a ω ST s2para compensar el efecto <strong>de</strong>l muestreo en lamatriz 12 E¡ x¢ . Los autores aplican el controlador obtenido a un accionamiento <strong>de</strong> 37 kWcon una inercia <strong>de</strong> 0¢ 41kgr¤ m 2 obteniendo unos resultados marginalmente mejores quelos obtenidos mediante un control vectorial indirecto. En (Bodson et al., 1994) se aplicaun método ad-hoc para diseñar un control mediante linealización entrada salida a partir<strong>de</strong> un control vectorial clásico en ejes <strong>de</strong> flujo <strong>de</strong> rotor. Se presenta un control <strong>de</strong> posicióncon un motor <strong>de</strong> 62 W con una inercia igual a 0¢ 00011kgr ¤ m 2 , con el que obtienenbuenos resultados, aunque usando una frecuencia <strong>de</strong> muestreo <strong>de</strong> 4 kHz.En esta sección se va a aplicar la formulación sistemática presentada en la sección2.2 al mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes <strong>de</strong> flujo <strong>de</strong> rotor. Dado que en este sistema<strong>de</strong> referencia las variables <strong>de</strong> estado varían lentamente, es <strong>de</strong> esperar que el controladormediante linealización entrada-salida se comporte mejor en tiempo discreto.En el apéndice A se muestra que el mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes d-q quegiran solidarios al flujo <strong>de</strong> rotor viene dado por las ecuaciones:A¤ ¡¥¢x¤ ¡¥¢B¤ ¡¥¢ddti r Sdi r Sqψ r Rd£¥¤¦ ¡ψ r Rq ¡ 0d ω Rdt¡A ω S B¡ ¡ ω S A Cω RD 0 E£¥¤i r Sdi r Sqψ r Rd£¥¤F 00 F0 0£¥¤u¦u r Sdu r (2.33)¡£¢ ¤Sq§¡ e¡ ¢¡P2J m m l (2.34)m e Gψ r Rd ir Sq (2.35)en don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes y viene dada por:ω S ¡ ω R¢Di r Sqψ r Rd(2.36)Como el sistema tiene dos entradas u r Sd y ur Sq , es necesario <strong>de</strong>finir dos salidas, eligiéndoseel flujo <strong>de</strong> rotor en eje d, que coinci<strong>de</strong> con su módulo en este sistema <strong>de</strong> referencia,y la velocidad:y 1 ¡ ψ r Rd (2.37)y 2 ¡ ω R (2.38)12 ω S es la velocidad <strong>de</strong> giro <strong>de</strong>l vector <strong>de</strong> flujo.
¢¢¢¢Eψ r Rd¢© ¡¢¢2.4 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 19La <strong>de</strong>rivada <strong>de</strong> la primera salida, aplicando (2.3) y teniendo en cuenta (2.33), vendrádada por:ddt y d1dt ψr ¡ Rd L ¡f ψ r m¢Rd L g jψ r Rd u j (2.39)con:m∑j 1L f ψ r Rd ¡ Di r Sd∑j 1Eψ r Rd (2.40)L g jψ 2 u j ¡ 0 (2.41)Como no aparece la entrada u en la primera <strong>de</strong>rivada, es necesario volver a <strong>de</strong>rivar:con:d 2dt 2 ψr ¡ Rd L 2 f ψr ¢Rdm∑j 1L g jL f ψ r Rd u j (2.42)m∑j 1L 2 f ψr Rd ¡ D¨Ai r Sd¡ D¡ A ¢ E¢ i r Sdω S i r ¢SqBψ r Rd©¢Dω S i r ¢SqE ¡ Di r SdEψ r Rd¢¨DB ¢ E 2©ψ r Rd (2.43)L g jL f ψ r Rd u j ¡ DFu r Sd (2.44)con lo cual el grado relativo <strong>de</strong> la salida ψ r R<strong>de</strong>s <strong>de</strong> dos.con:Repitiendo el proceso para la salida ω R se obtiene:ddt y 2 ¡que usando (2.35) se transforma en:ddt ω R ¡ L f ω R¢L f ω R ¡m∑j 1L g jω R u j (2.45)P2J ¡ m e¡ m l ¢ (2.46)con:L f ω R ¡m∑j 1P2J¨Gψ s Rd is m (2.47)l© Sq¡L g jω R u j ¡ 0 (2.48)Por tanto, al no aparecer la entrada u en la <strong>de</strong>rivada <strong>de</strong> la velocidad, hay que volver a<strong>de</strong>rivar, obteniendo:con:L 2 f ω R ¡d 2dt 2 ω R L 2 mf ω ¡ R ∑ L g jL f ω R u j (2.49)j 1¢PG ψ r Rd¨¡ ω S i r ¢Sd2J¡Ai r Sq¡ Cω R ψ r Rd©i r Sq ¡ Di r SdL f m l¢ (2.50)m∑j 1L g jL f ω R u j ¡P2J FGψr Rd ur Sq (2.51)
ψ¦ω¦0 0§ψ¦ω¦x 1¤ ¡£¢20 <strong>Control</strong> mediante linealización exactaPor tanto el grado relativo <strong>de</strong> la salida ω R es <strong>de</strong> dos, el grado relativo <strong>de</strong>l sistema(2.33-2.35) es <strong>de</strong> ¡ 2¢ 2¢ y su grado relativo total es r ¡ 4, que es igual al or<strong>de</strong>n <strong>de</strong>l sistema¡ n ¡ 4¢ . Por tanto en este sistema <strong>de</strong> referencia no existen dinámicas ocultas (zerodinamics), con lo que el controlador mediante linealización entrada-salida garantizará laestabilidad <strong>de</strong>l sistema completo.La matriz <strong>de</strong> <strong>de</strong>sacoplo E¡ x¢ viene dada porx¢¦DF 0P0E¡ (2.52)¡2J FGψr Rd§que es invertible salvo para flujo nulo. Por tanto, teniendo en cuenta (2.6), se pue<strong>de</strong> usarla transformación:u ¡ E¡ x¢¡1¦v 1¡ L 2 f ψr Rdv 2¡ L 2 f ω (2.53)R§Para transformar el sistema original (2.33–2.34) en el sistema lineal <strong>de</strong>sacoplado:ddt¦ddtψ r Rdddt ω R§¦v 1v¡ (2.54)2§En don<strong>de</strong> la entrada v 1 controla el cuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo y la entrada v 2 la velocidad,estando <strong>de</strong>sacoplados ambos subsistemas.2.4.1. Diseño <strong>de</strong>l controlador linealEl sistema resultante <strong>de</strong> la linealización entrada-salida por realimentación (2.54) secontrola mediante un regulador lineal. Como las variables a controlar son el flujo y lavelocidad, no sus <strong>de</strong>rivadas, y a<strong>de</strong>más ambos subsistemas están <strong>de</strong>sacoplados, la ecuación(2.54) se pue<strong>de</strong> transformar en:A 1¦0 1¤¡£¢B 1¦0¡£¢¤ddtr Rdddt ψr ¡Rd§r Rdddt ψr ¢Rd§1 (2.55)ddtRddt ω R§¡¦0 1¤¡£¢0 0§Rddt ω ¡£¢ ¤R§¢¦0v¡£¢¤ 1§v1§2 (2.56)Para controlar cada uno <strong>de</strong> los subsistemas lineales pue<strong>de</strong> usarse un control proporcional,v i ¡ k T i e i con e i ¡ x i¡ ¡ x i ¢ r , siendo ¡ x i¢ r el valor <strong>de</strong> referencia <strong>de</strong> x i. k i se calculapara que el sistema:ddt e ¢i A ¡ isea estable. Por tanto el controlador completo se expresa:B i k T e i¢ i (2.57)A 2x 2B 2T1 e 1¡ L f 2 ψ r Rdk T 2 e 2¡ L f 2 ω R§¡ x¢¡ ku (2.58)E¡Nótese que los sistemas lineales <strong>de</strong>sacoplados obtenidos <strong>de</strong>spués <strong>de</strong> la linealizaciónentrada-salida son análogos a los obtenidos en la aplicación en ejes <strong>de</strong> estator (sección2.3.1), por lo que se pue<strong>de</strong>n usar las mismas ganancias tanto para el controlador en1¦ejes<strong>de</strong> estator como en ejes <strong>de</strong> flujo <strong>de</strong> rotor; es <strong>de</strong>cir, en ambos controladores lo único quecambia es la transformación no lineal.
2.4 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 21ψ r Rdrddt ψr Rdrk 1xv 1L 2 f ψr Rd¡x¤ E¡ x¢¡ 1u r du r qdq/rstω Rrddt ω Rrv 2k 2xL 2 f ω R ¡xxgiroejesi r di r q∆ααdq/rsti Ri Sω Rψ r Rdαpol/carψ s RFigura 2.8: Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento2.4.2. Detalles <strong>de</strong> implementaciónEn la figura 2.8 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong>l sistema <strong>de</strong> control, en el quese indican los cambios <strong>de</strong> coor<strong>de</strong>nadas realizados antes <strong>de</strong> aplicar el controlador (2.58).En primer lugar, en el bloque “pol/car”, se calcula el módulo y el ángulo <strong>de</strong>l vector<strong>de</strong> flujo medido (o estimado) en ejes <strong>de</strong> estator según las ecuaciones:ψ r Rd ¡ ψ s Rd 2 ¢ ψ s Rq 2 (2.59)α ¡ arctan ψs Rqψ s Rd(2.60)El módulo coinci<strong>de</strong> con la componente ψ r R<strong>de</strong>n ejes <strong>de</strong> flujo <strong>de</strong> rotor y su ángulo α es elángulo formado entre los ejes <strong>de</strong> estator y los ejes <strong>de</strong> flujo <strong>de</strong> rotor.En los bloques “dq/rst” se realizan las transformaciones <strong>de</strong> Park para convertir entremagnitu<strong>de</strong>s trifásicas y vectores en ejes d-q <strong>de</strong> flujo <strong>de</strong> rotor. Para convertir las corrientesse usa el ángulo <strong>de</strong>l flujo <strong>de</strong> rotor α, pero para convertir las tensiones obtenidas porel controlador a magnitu<strong>de</strong>s trifásicas, es necesario tener en cuenta el giro <strong>de</strong> los ejesdurante el periodo <strong>de</strong> muestreo en la implantación digital (García Cerrada, 1991). Paraello se suma al ángulo α el ángulo recorrido por los ejes <strong>de</strong> flujo <strong>de</strong> rotor en medioperiodo <strong>de</strong> muestreo, el cual se obtiene en el bloque “giro ejes” mediante:∆α ¡ ω ST s2(2.61)En don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes <strong>de</strong> flujo <strong>de</strong> rotor, que viene dada por laecuación (2.36)El resto <strong>de</strong> bloques son análogos a los mostrados en la implantación en ejes <strong>de</strong> estator(sección 2.3.2), y al igual que entonces se ha <strong>de</strong>spreciado el término L f m l en el cálculo<strong>de</strong> L 2 f ω R (ecuación 2.50) sin que se aprecien resultados anómalos en las simulaciones.
22 <strong>Control</strong> mediante linealización exactaψ r Rd1.210.80.60.40.200510153002001000-100-200-3000510ω R1520252025Figura 2.9: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor con el controlador implantado en tiempocontinuo. Eje x en seg. Ejes y en W b y rad el s.2.4.3. Resultados <strong>de</strong> simulaciónPara comparar las prestaciones <strong>de</strong>l controlador en ejes <strong>de</strong> flujo <strong>de</strong> rotor con respectoal implantado en ejes <strong>de</strong> estator, se han realizado una serie <strong>de</strong> simulaciones análogas alas realizadas con el controlador en ejes <strong>de</strong> estator.En las figuras 2.9, 2.10, 2.11 y 2.12 se muestran los resultados <strong>de</strong> la simulación <strong>de</strong>lmotor <strong>de</strong>scrito según el mo<strong>de</strong>lo (2.33–2.34) con el controlador (2.58). El motor elegidopara la simulación ha sido el mismo <strong>de</strong>l apartado 2.3.3, que tiene una potencia <strong>de</strong> 250 Wy cuyos parámetros se muestran en el apéndice B. Los controladores para los sistemaslineales resultantes se han diseñado mediante asignación <strong>de</strong> polos, situando los polosen el eje real <strong>de</strong> forma que las constantes <strong>de</strong> tiempo en lazo cerrado <strong>de</strong>l controlador <strong>de</strong>velocidad sean igual a 1s y 0¢ 1s y las <strong>de</strong>l controlador <strong>de</strong> flujo a 0¢ 1s y 0¢ 01s, con loque sus respuestas se aproximarán a las <strong>de</strong> un sistema <strong>de</strong> primer or<strong>de</strong>n con constante <strong>de</strong>tiempo <strong>de</strong> 1s y 0¢ 1s respectivamente.Inicialmente se sitúa la referencia <strong>de</strong>l módulo <strong>de</strong>l flujo 1¢ en 05Wb y la referencia<strong>de</strong> la velocidad en 300rad el£ s (1432 r.p.m.). Las referencias <strong>de</strong> las <strong>de</strong>rivadas se hanpuesto a cero durante toda la simulación. El par <strong>de</strong> carga es proporcional a la velocidad0¢ con 001 Nmrad el scomo constante <strong>de</strong> proporcionalidad. A los 7 segundos se invierte lareferencia <strong>de</strong> velocidad provocando un cambio <strong>de</strong> sentido <strong>de</strong> giro en la máquina. A los14 segundos se da un escalón <strong>de</strong> par haciendo que la constante <strong>de</strong> proporcionalidad sea003 Nm 0¢rad el sen 0¢Nmlugar <strong>de</strong> 001rad el s . Por último en t 20s se disminuye la referencia ¡ <strong>de</strong>lmódulo <strong>de</strong>l flujo a la mitad.En la figura 2.9 se muestra la simulación <strong>de</strong>l sistema en tiempo continuo. Como pue<strong>de</strong>apreciarse el comportamiento es idéntico al obtenido con el controlador implantado enejes <strong>de</strong> estator: las salidas se estabilizan en sus valores <strong>de</strong> referencia en aproximadamentecinco constantes <strong>de</strong> tiempo, <strong>de</strong> acuerdo con el diseño propuesto para los controladores.
2.4 Aplicación <strong>de</strong> la linealización entrada-salida por realimentación. . . 23ψ r Rd1.210.80.60.40.200510152025150100500-50-100-150-2000510ω R152025Figura 2.10: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms. Eje x en seg. Ejes y en W b y rad el s.A<strong>de</strong>más los controladores <strong>de</strong> flujo y <strong>de</strong> velocidad están perfectamente <strong>de</strong>sacoplados y elcontrolador <strong>de</strong> velocidad es muy robusto frente a variaciones en el par <strong>de</strong> carga, pues ent ¡ 14s, aunque el par varía un 200%, la perturbación <strong>de</strong> la velocidad es tan solo <strong>de</strong>l2¢ 9%.Para la implantación digital <strong>de</strong>l sistema <strong>de</strong> control se ha procedido <strong>de</strong> una maneraanáloga al controlador en ejes <strong>de</strong> estator: se ha discretizado el sistema lineal y se handiseñado los controladores discretos mediante asignación <strong>de</strong> polos, situándolos en unlugar equivalente al caso continuo. La ecuación <strong>de</strong> <strong>de</strong>sacoplo (2.58) se ha <strong>de</strong>jado igualque en la aplicación en tiempo continuo.En la figura 2.10 se muestra la simulación <strong>de</strong>l sistema en tiempo discreto con un periodo<strong>de</strong> muestreo <strong>de</strong> T s ¡ 1ms con la consigna <strong>de</strong> velocidad igual a 150rad el£ s (716 r.p.m.),observándose que el sistema presenta errores <strong>de</strong> seguimiento apreciables en régimen permanente(un 5% en la velocidad) y un acoplamiento entre los subsistemas <strong>de</strong> flujo y<strong>de</strong> par, aunque su comportamiento es mucho mejor que el observado en la implantaciónen ejes <strong>de</strong> estator (figura 2.3). Sin embargo si se aumenta la consigna <strong>de</strong> velocidad porencima <strong>de</strong> 150rad el£ s, el sistema se vuelve inestable. Esta inestabilidad no se produceen accionamientos <strong>de</strong> mayor potencia e inercia elevada. Si se repite la simulación anteriorcon un motor <strong>de</strong> 15 kW, cuyos parámetros se muestran en el apéndice B, el sistemano se vuelve inestable cuando la consigna <strong>de</strong> velocidad se sitúa en 300rad el£ s, aunqueel comportamiento <strong>de</strong>l controlador <strong>de</strong>ja bastante que <strong>de</strong>sear, produciéndose un error <strong>de</strong>seguimiento <strong>de</strong> la velocidad <strong>de</strong> un 33% y un gran acoplamiento entre los controladores<strong>de</strong> flujo y <strong>de</strong> par. También conviene <strong>de</strong>stacar que si se elimina la compensación <strong>de</strong>l giro<strong>de</strong> los ejes (ecuación 2.61) el controlador presenta un error en régimen permanente <strong>de</strong> lavelocidad <strong>de</strong> un 80%, que es <strong>de</strong>l mismo or<strong>de</strong>n que el producido en la implantación enejes <strong>de</strong> estator.En la figura 2.11 se muestra la evolución <strong>de</strong> la velocidad y el flujo <strong>de</strong> rotor <strong>de</strong>l motor
24 <strong>Control</strong> mediante linealización exactaψ r Rd1.210.80.60.40.2005101520254503001500-150-300-4500510ω R152025Figura 2.11: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms. Eje x en seg. Ejes y en Wb y rad 0¢ el s.<strong>de</strong> 250 W cuando se implanta el controlador con T s ¡ 0¢ 1ms <strong>de</strong> periodo <strong>de</strong> muestreo, observándoseque el comportamiento <strong>de</strong>l sistema es totalmente satisfactorio, incluso cuandola consigna <strong>de</strong> velocidad se sitúa en 300rad el£ s (1432 r.p.m.), al igual que en el caso continuo.Nuevamente la evolución <strong>de</strong> las salidas es acor<strong>de</strong> con el diseño <strong>de</strong> los controladoreslineales propuesto, estando <strong>de</strong>sacoplados los subsistemas <strong>de</strong> flujo y <strong>de</strong> velocidad. El error<strong>de</strong> seguimiento <strong>de</strong> la velocidad es <strong>de</strong> un 0¢ 2% y cuando se produce un escalón en el par<strong>de</strong> carga <strong>de</strong>l 200%, la perturbación en la velocidad es <strong>de</strong> un 3¢ 4%, que es <strong>de</strong>l mismoor<strong>de</strong>n que la producida en la implantación en tiempo continuo.Por último en la figura 2.12 se muestra una simulación con un periodo <strong>de</strong> muestreo<strong>de</strong> T s 1ms en la que la consigna <strong>de</strong> velocidad se ha bajado a 30rad el£ s (143 r.p.m.),¡apreciándose que el comportamiento <strong>de</strong>l sistema a bajas velocida<strong>de</strong>s tampoco es satisfactorio13 cuando el accionamiento es <strong>de</strong> baja potencia y baja inercia, aunque muchomejor que el obtenido con el controlador implantado en ejes <strong>de</strong> estator (figura 2.5). Aligual que en el controlador en ejes <strong>de</strong> estator, si la inercia <strong>de</strong>l accionamiento es igual0¢ 1kgr¤ a m 2 , el comportamiento <strong>de</strong>l controlador mejora apreciablemente, obteniéndoseunos resultados marginalmente mejores que los ofrecidos por el controlador implantadoen ejes <strong>de</strong> estator (figura 2.6).2.5. ConclusionesEn este capítulo se ha presentado un controlador mediante linealización exacta entradasalida,implantándose en ejes <strong>de</strong> estator y <strong>de</strong> flujo <strong>de</strong> rotor. Mediante simulación se ha<strong>de</strong>mostrado que, si bien ambas implantaciones tienen un comportamiento a<strong>de</strong>cuado entiempo continuo; el comportamiento en tiempo discreto no es <strong>de</strong>l todo satisfactorio, es-13 El error <strong>de</strong> seguimiento <strong>de</strong> la velocidad es igual a un 20¡ 3%.
2.5 Conclusiones 25ψ r Rd1.210.80.60.40.2005101520253020100-10-20-300510ω R152025Figura 2.12: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor. <strong>Control</strong>ador en tiempo discreto con T s ¡1ms pero con referencia <strong>de</strong> velocidad a 30rad el£ s. Eje x en seg. Ejes y en W b y rad el s.pecialmente la implantación en ejes <strong>de</strong> estator, que necesita altas frecuencias <strong>de</strong> muestreo( f s ¡ 10kHz) para obtener un comportamiento razonable. En cambio con la implantaciónen ejes <strong>de</strong> flujo <strong>de</strong> rotor se obtienen resultados satisfactorios con altas frecuencias <strong>de</strong>muestreo, aunque con bajas frecuencias <strong>de</strong> muestreo ( f s ¡ 1kHz) el controlador es inestablesi el accionamiento es <strong>de</strong> baja potencia (250 W) o tiene una inercia baja (menor<strong>de</strong> 4kgr¤ m 2 en el accionamiento <strong>de</strong> 15 kW que se ha simulado).Conviene <strong>de</strong>stacar que en la mayoría <strong>de</strong> la literatura consultada sólo se muestranresultados <strong>de</strong> simulación en tiempo continuo, sin llegar a realizar una implantación entiempo discreto como se ha realizado en esta tesis, la cual ha puesto <strong>de</strong> manifiesto laslimitaciones <strong>de</strong> este tipo <strong>de</strong> controladores cuando se aplican a la máquina <strong>de</strong> inducción.A<strong>de</strong>más, la comparación entre las prestaciones <strong>de</strong>l controlador mediante linealizaciónexacta cuando se aplica a la máquina mo<strong>de</strong>lada en ejes <strong>de</strong> estator o en ejes <strong>de</strong> flujo <strong>de</strong>rotor es novedosa y ha servido para poner una vez más <strong>de</strong> manifiesto que la implantación<strong>de</strong> los controladores en ejes <strong>de</strong> flujo <strong>de</strong> rotor es mucho más ventajosa que en ejes <strong>de</strong>estator.
26 <strong>Control</strong> mediante linealización exacta
Capítulo 3<strong>Control</strong> <strong>de</strong> Lyapunov3.1. IntroducciónEn el capítulo 2 se ha aplicado un controlador mediante linealización exacta entradasalidaal motor <strong>de</strong> inducción, mostrándose que su comportamiento en tiempo discretoa bajas frecuencias <strong>de</strong> muestreo no es satisfactorio. En este capítulo, siguiendo elplanteamiento mostrado en (Marino et al., 1996), se presenta una estrategia <strong>de</strong> controlno lineal basada en una función <strong>de</strong> Lyapunov <strong>de</strong> los errores <strong>de</strong> seguimiento. La aplicación<strong>de</strong> este controlador en tiempo discreto a bajas frecuencias <strong>de</strong> muestreo (1 kHz) haproporcionado resultados satisfactorios.En la sección 3.2 se exponen los fundamentos <strong>de</strong>l control <strong>de</strong> Lyapunov 1 , analizándosela influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en su comportamiento. En la sección 3.3 seaplica el control <strong>de</strong> Lyapunov a una máquina <strong>de</strong> inducción mo<strong>de</strong>lada en ejes <strong>de</strong> estator,mostrándose mediante simulación que los errores <strong>de</strong> seguimiento en régimen permanenteobtenidos cuando el controlador se implanta en tiempo discreto son elevados. Por último,en la sección 3.4 se muestra la aplicación <strong>de</strong>l control <strong>de</strong> Lyapunov al motor <strong>de</strong> induccióncuando éste se mo<strong>de</strong>la en ejes <strong>de</strong> flujo <strong>de</strong> rotor, pudiéndose observar que los errores <strong>de</strong>seguimiento en régimen permanente son ahora mucho menores que en la aplicación enejes <strong>de</strong> estator.3.2. Fundamentos <strong>de</strong>l <strong>Control</strong> <strong>de</strong> LyapunovSi se consi<strong>de</strong>ra un sistema <strong>de</strong> la forma:ddt x ¡ f¡ x¢¢G¡ x¢ u (3.1)y ¡ h¡ x¢ (3.2)en don<strong>de</strong> x es el vector <strong>de</strong> estado (n£ 1), u es el vector <strong>de</strong> entrada (m£ 1), f y h son doscampos vectoriales “suaves” <strong>de</strong> R n R n y R n R m , respectivamente y G es un vector1 En la literatura no hay un consenso para nombrar a este tipo <strong>de</strong> controladores. Algunos autores (Marinoet al., 1996) lo llaman simplemente output-feedback sin hacer énfasis en que están basados en el uso <strong>de</strong> unafunción <strong>de</strong> Lyapunov para garantizar la estabilidad <strong>de</strong>l sistema. En (San<strong>de</strong>rs y Verghese, 1992) se usa el nombremás apropiado Lyapunov based control en el contexto <strong>de</strong> convertidores cc/cc. En este trabajo se ha preferidousar “controlador <strong>de</strong> Lyapunov” para <strong>de</strong>signar a este tipo <strong>de</strong> controladores.
28 <strong>Control</strong> <strong>de</strong> Lyapunovfila £ (1 m) <strong>de</strong> campos vectoriales “suaves” <strong>de</strong> R nseguimiento como:R n . Si se <strong>de</strong>finen los errores <strong>de</strong>ỹ ¡ y¡ y r (3.3)don<strong>de</strong> y r es la referencia <strong>de</strong>l vector <strong>de</strong> salida, se pue<strong>de</strong> establecer como candidata a función<strong>de</strong> Lyapunov para garantizar la estabilidad <strong>de</strong>l sistema en bucle cerrado:12 ∑ iV t ¡La <strong>de</strong>rivada <strong>de</strong> V t en (3.4) pue<strong>de</strong> expresarse mediante:ddt V t ¡ ∑iỹ 2 i (3.4)ỹ i ¤ddt ỹi¡ (3.5)Si se consigue diseñar un controlador que fuerce la <strong>de</strong>rivada <strong>de</strong> cada uno <strong>de</strong> los errores<strong>de</strong> seguimiento a:ddt ỹi ¡ ¡ k i ỹ i (3.6)La <strong>de</strong>rivada <strong>de</strong> V t vendrá dada por:ddt V t ¡ ∑i¡Como la función V t (3.4) es <strong>de</strong>finida positiva y su <strong>de</strong>rivada (3.7) es una función <strong>de</strong>finidanegativa, la aplicación <strong>de</strong>l método directo <strong>de</strong> Lyapunov (Khalil, 1996) <strong>de</strong>muestra que elorigen <strong>de</strong>l sistema (3.1-3.3), ỹ ¡ 0, es un punto <strong>de</strong> equilibrio asintóticamente estable si sepue<strong>de</strong> diseñar un controlador que fuerce (3.6). A<strong>de</strong>más, dado que:k i ỹ 2 i (3.7)V t ∞ cuando ¢ ỹ¢ ∞ (3.8)según el teorema <strong>de</strong> Barbashin-Krasovskii (Khalil, 1996) el origen es globalmente asintóticamenteestable.La <strong>de</strong>rivada <strong>de</strong> cada una <strong>de</strong> las salidas se pue<strong>de</strong> expresar como (Slotine y Li, 1991):ddt y i ¡ L f h i ¡ x¢¢m∑j 1L g jh i ¡ x¢ u j (3.9)en don<strong>de</strong> L f h¡ x¢ es la <strong>de</strong>rivada <strong>de</strong> Lie <strong>de</strong> la función h¡ x¢ con respecto al campo vectorial f.Si el grado relativo <strong>de</strong> todas las salidas es uno, para cada salida y i al menos uno <strong>de</strong> lostérminos L g jh i ¡ x¢ será distinto <strong>de</strong> cero y la entrada u j aparecerá en la <strong>de</strong>rivada <strong>de</strong> dichasalida y i . Será posible entonces diseñar un controlador que fuerce la entrada u <strong>de</strong> formaque se cumpla la ecuación (3.6) para cada una <strong>de</strong> las salidas. En este caso la respuestadinámica <strong>de</strong> los errores <strong>de</strong> seguimiento <strong>de</strong>l sistema en bucle cerrado vendrá dada por laecuación (3.6), que es una ecuación diferencial <strong>de</strong> primer or<strong>de</strong>n cuya solución es:ỹ i ¡ c i ¤ e ¡k i t(3.10)Siendo c i una constante <strong>de</strong> integración. Nótese que según esto los errores <strong>de</strong> seguimientoen bucle cerrado <strong>de</strong> cada una <strong>de</strong> las salidas <strong>de</strong>crecerán exponencialmente con constante<strong>de</strong> tiempo 1£ k i .
¡¡¢¡¡¢¡¡¢£¥¤¤¦¡¡¢¢¦¡¤¡¡¢¡¡¢£¥¤¤¦¡¡¡¢¦¡¤¡¡¢£¥¤¤¦¡¦¡¢¤¡¡¢¡¡¡¢¡¡¢£¥¤¤3.2 Fundamentos <strong>de</strong>l <strong>Control</strong> <strong>de</strong> Lyapunov 293.2.1. Ecuaciones <strong>de</strong>l controladorA partir <strong>de</strong> (3.9) la <strong>de</strong>rivada <strong>de</strong> las salidas se pue<strong>de</strong> escribir en forma vectorial como:ddty 1£¥¤¤.y m¦¡L f h 1 x¢ ¡.L f h m ¡ x¢E¡ x¢ u (3.11)En don<strong>de</strong> los elementos <strong>de</strong> la matriz E¡ x¢ <strong>de</strong> ¡ m£ m¢ se pue<strong>de</strong>n <strong>de</strong>ducir fácilmente apartir <strong>de</strong> (3.9).La ecuación (3.6) se pue<strong>de</strong> expresar en forma vectorial como:ddt£¥¤y 1.y mddt£¥¤y 1r.y mr£¥¤¤k 1 ỹ 1.(3.12)¦k m ỹ mSustituyendo (3.11) en (3.12) se obtiene:L f h 1 x¢ ¡.L f h m ¡ x¢E¡ x¢ u¡ddt£¥¤y 1r.y mr£¥¤¤k 1 ỹ 1.(3.13)¦k m ỹ mSi E¡ x¢ no es singular en el dominio <strong>de</strong> interés, la ecuación anterior se pue<strong>de</strong> transformaren:u ¡ E¡ x¢¡ 1Que es la ecuación <strong>de</strong>l controlador <strong>de</strong> Lyapunov.k ¡¢ d1 ỹ 1¡ L f h 1 dt y £¥¤¡ x¢¤1r.(3.14)¦¢¡dk m ỹ m¡ L f h m dt y mr x¢ ¡Comparación entre el controlador <strong>de</strong> Lyapunov y el control mediante linealizaciónentrada-salidaSi en el controlador mediante linealización entrada-salida <strong>de</strong>scrito en la sección 2.2se usa un controlador proporcional (v i ¡ ¡ k i ỹ i ) y el sistema tiene un grado relativo r i ¡ 1para cada una <strong>de</strong> sus salidas, la ecuación <strong>de</strong>l controlador será, teniendo en cuenta (2.6):u ¡ E¡ x¢¡ 1v 1¡ L r 1fh 1 x¢ ¡..v m¡ L r mfh m x¢ ¡E¡ x¢¡ 1k ¡ 1 ỹ 1¡ L f h 1 x¢ ¡..¡ k m ỹ m¡ L f h m ¡ x¢¦(3.15)Que como se pue<strong>de</strong> apreciar es igual a la ecuación <strong>de</strong>l controlador <strong>de</strong> Lyapunov (3.14)cuando las <strong>de</strong>rivadas <strong>de</strong> las referencias son iguales a cero. Por tanto en este caso el comportamiento<strong>de</strong> ambos controladores en régimen permanente será idéntico.3.2.2. Influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en el controlador <strong>de</strong>LyapunovLas prestaciones <strong>de</strong>l controlador empeorarán si el mo<strong>de</strong>lo <strong>de</strong> la planta no es correcto.En concreto, si existen errores en el mo<strong>de</strong>lado <strong>de</strong>l valor <strong>de</strong> L f h i ¡ x¢ , <strong>de</strong> forma que el valor
32 <strong>Control</strong> <strong>de</strong> LyapunovSin embargo, si se usa un inversor fuente <strong>de</strong> corriente o un inversor fuente <strong>de</strong> tensióncontrolado por corriente, las entradas al sistema serán las corrientes <strong>de</strong> estator i s S, con respectoa las cuales las salidas <strong>de</strong>l sistema tienen un grado relativo <strong>de</strong> uno, siendo aplicabledirectamente el control <strong>de</strong> Lyapunov.Si se toman como entradas las corrientes <strong>de</strong> estator, las <strong>de</strong>rivadas <strong>de</strong> Lie <strong>de</strong> las salidasrespecto a estas nuevas entradas son:Por tanto la matriz E¡ x¢ será igual a:L f h 1 ¡ x¢ ¡ 2E ψ 2 (3.34)L g1 h 1 ¡ x¢ ¡ 2Dψ s Rd (3.35)L g2 h 1 ¡ x¢ ¡ 2Dψ s Rq (3.36)L f h 2 ¡ x¢ ¡ ¡P2J m l (3.37)L g1 h 2 ¡ x¢ ¡ ¡PE¡ x¢ ¡¦2DψL g2 h 2 ¡ x¢ ¡2J Gψs Rq (3.38)P2J Gψs Rd (3.39)sRd2Dψ s Rq¡P2J Gψs RqY la ecuación <strong>de</strong>l controlador, aplicando (3.14):¦i s Sdi s Sq§¡ E¡ x¢¡ 1¦¡Si se calcula la inversa <strong>de</strong> E¡ x¢ , (3.41) queda:¦i s Sdi s Sq§¡12¦11ψ2Dψ s Rd2D ψs RqP(3.40)2J Gψs Rd§k 1 ỹ 1¡ 2E ψ 2 ¢ ddtψ 2 r¢2JPG ψs Rq¡2J¡PG ψs Rd§¦¡ k 1 ỹ 1¡ 2E ψ 2 ¢ ddtψ 2 r¢¡ k 2 ỹ 2¢ P2Jm l¢ ddtω Rr §¡ k 2 ỹ 2¢ P2Jm l¢ ddtω Rr §(3.41)que es la expresión <strong>de</strong>l controlador <strong>de</strong> Lyapunov en ejes <strong>de</strong> estator. Tal como pue<strong>de</strong>apreciarse, E¡ x¢ es singular sólo para flujo <strong>de</strong> rotor nulo.(3.42)3.3.1. <strong>Control</strong> <strong>de</strong> la máquina <strong>de</strong> inducción en modo corrienteEn la sección 3.3 se ha mostrado que para que sea aplicable el controlador <strong>de</strong> Lyapunova la máquina <strong>de</strong> inducción, han <strong>de</strong> controlarse las corrientes <strong>de</strong> alimentación <strong>de</strong> lamáquina en lugar <strong>de</strong> las tensiones. La solución más inmediata es el uso <strong>de</strong> un inversorfuente <strong>de</strong> corriente, con el que se obtendrán las mejores prestaciones <strong>de</strong>l controlador <strong>de</strong>Lyapunov. Sin embargo este tipo <strong>de</strong> inversores presentan varios inconvenientes cuandose comparan con los fuente <strong>de</strong> tensión (Leonhard, 1990), (Mohan et al., 1995), (GarcíaCerrada, 1991). En primer lugar necesitan una bobina en el circuito intermedio que ha <strong>de</strong>tener una inductancia varias veces mayor que la inductancia <strong>de</strong> dispersión <strong>de</strong>l motor, locual hace que estos inversores sean mucho más pesados y costosos que los fuente <strong>de</strong> tensión.A<strong>de</strong>más el proceso <strong>de</strong> conmutación es más complejo que en un fuente <strong>de</strong> tensión,lo que limita la frecuencia máxima <strong>de</strong> conmutación. Por ello es mucho más atractivo eluso <strong>de</strong> un inversor fuente <strong>de</strong> tensión controlado por corriente, que es la ten<strong>de</strong>ncia actualen la práctica industrial.
0 A§¦B0 F§3.3 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator 33<strong>Control</strong> <strong>de</strong> la máquina <strong>de</strong> inducción con un inversor fuente <strong>de</strong> corrienteSi se usa un inversor fuente <strong>de</strong> corriente, la dinámica <strong>de</strong>l estator <strong>de</strong>saparece, conlo que, eliminando las ecuaciones <strong>de</strong>l estator <strong>de</strong> (3.24) se obtiene el mo<strong>de</strong>lo <strong>de</strong>l motorcuando está alimentado por una fuente <strong>de</strong> corriente:ddt¦ψ s Rdψ s Rq§¡dω Rdt¡A¤ ¡£¢¦E ¡ ω Rω R E§x¤ ¡¥¢¦ψ s Rdψ s ¢Rq§B¦D 0¤¡£¢0 D§i¦i s Sdi s (3.43)¡£¢¤Sq§¡ e¡ ¢G¡ Sq¡ ¡ Sd¢P2J m m l (3.44)m e ψ s Rd is ψ s Rqi s (3.45)Éste será el mo<strong>de</strong>lo usado para simular la máquina <strong>de</strong> inducción en este caso.<strong>Control</strong> <strong>de</strong> la máquina <strong>de</strong> inducción con un inversor fuente <strong>de</strong> tensión controladopor corriente.Existen varios métodos para implementar un inversor fuente <strong>de</strong> tensión controladopor corriente. Por ejemplo, se pue<strong>de</strong> usar un controlador <strong>de</strong> corriente <strong>de</strong> alta ganancia yalta velocidad <strong>de</strong> respuesta que garantice que la corriente <strong>de</strong> estator sigue exactamente ala referencia, pudiéndose usar controladores PWM o controladores con histéresis (Vas,1998). En ambos casos, <strong>de</strong>bido a la alta frecuencia <strong>de</strong> muestreo necesaria, la implantaciónmediante un microprocesador es problemática, pudiendo ser necesario recurrir a un circuitoadicional para su implantación analógica. Como alternativa, en este trabajo se implementael controlador <strong>de</strong> corriente teniendo en cuenta la dinámica <strong>de</strong>l estator en elcontrolador, lo que permite su implantación digital a bajas frecuencias <strong>de</strong> muestreo.De (3.24) se <strong>de</strong>duce que la dinámica <strong>de</strong>l estator <strong>de</strong>l motor viene dada por:ddt¦i s Sdi s Sq§¡A¦A 0¤¡£¢0 A§x¦i s Sdi s Sq§¢¡£¢¤B¦F 0¤¡¥¢0 F§u¦u s Sdu s Sq§¢¤ ¡¥¢Cω RP¤ ¡£¢p¤¡¥¢¡ Cω R B§¦ψ s Rdψ s Rq§(3.46)que es un sistema con las corrientes <strong>de</strong> estator como variables <strong>de</strong> estado, las tensiones <strong>de</strong>estator como entradas y el flujo se pue<strong>de</strong> consi<strong>de</strong>rar como una perturbación al sistema. Sise realiza la transformación:¦u s Sdu s Sq§¡¦v s Sdv s Sq§¡0 F§¦F 0¡ 1¤¦BCω R¦ψ s Rdψ s Rq§(3.47)el sistema a controlar, sustituyendo (3.47) en (3.46), se reduce a:¡ Cω R B§ddt¦i s Sdi s Sq§¡i s Sq§¢x¦i s Sd¡¥¢¤B¦F 0¤¡¥¢v¦v s Sdv s (3.48)¡£¢ ¤Sq§A¦A 0¤¡¥¢resultando dos sistemas una entrada - una salida totalmente <strong>de</strong>sacoplados <strong>de</strong> la forma:ddt is ¡ Sx Ai s ¢SxFv s Sx (3.49)
34 <strong>Control</strong> <strong>de</strong> Lyapunovψ 2 251.41.210.80.60.40.20051015203002001000-100-200-3000510ω R152025Figura 3.1: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov en tiempo continuoSi se aumenta el sistema para incluir una integración se obtiene:ddt¦i s Sxi s Sx§¡¦A 01 0§¦i s Sxi s Sx§¢¦F0§v s Sx (3.50)Siendo posible diseñar un controlador en variables <strong>de</strong> estado mediante asignación <strong>de</strong> polospara este sistema. En este trabajo se ha usado para ello la función place <strong>de</strong>sarrolladapor el autor para la toolbox <strong>de</strong> control <strong>de</strong> Octave.3.3.2. Resultados <strong>de</strong> simulaciónPara evaluar las prestaciones <strong>de</strong>l controlador propuesto y po<strong>de</strong>r compararlas con lasobtenidas en la sección 2.3.3 para el controlador mediante linealización entrada-salida, sehan realizado una serie <strong>de</strong> simulaciones usando la misma máquina y el mismo transitoriopara las referencias. En primer lugar se realizan una serie <strong>de</strong> simulaciones suponiendo queel motor está alimentado con un inversor fuente <strong>de</strong> corriente y con un controlador funcionandoen tiempo continuo para realizar <strong>de</strong>spués la misma simulación con el controladorimplantado en tiempo discreto. A continuación se realizan las mismas simulaciones peroalimentando al motor con un inversor fuente <strong>de</strong> tensión controlado por corriente, mostrandodistintas alternativas, tanto para el regulador <strong>de</strong> corriente como para el regulador <strong>de</strong>Lyapunov.Simulación con un inversor fuente <strong>de</strong> corriente i<strong>de</strong>alEn este apartado se muestra la simulación <strong>de</strong>l controlador <strong>de</strong> Lyapunov junto con unamáquina alimentada por un inversor fuente <strong>de</strong> corriente i<strong>de</strong>al.
3.3 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator 35ψ 2 251.41.210.80.60.40.20051015203002001000-100-200-3000510ω R152025Figura 3.2: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto con periodo <strong>de</strong> muestreo<strong>de</strong> 1msEn las figuras 3.1–3.5 se muestran los resultados <strong>de</strong> la simulación <strong>de</strong>l motor <strong>de</strong>scritosegún el mo<strong>de</strong>lo (3.43–3.45) con el controlador (3.42). El motor elegido para la simulaciónes el mismo que se usó en la sección 2.3.3 (250 W, Apéndice B). Las ganancias<strong>de</strong>l controlador <strong>de</strong> Lyapunov se han elegido <strong>de</strong> forma que las constantes <strong>de</strong> tiempo en lazocerrado sean las mismas que las <strong>de</strong>l controlador mediante linealización entrada salida.Como estas constantes <strong>de</strong> tiempo se eligieron iguales a 0¢ 1 s para el flujo y <strong>de</strong> 1 s para lavelocidad, teniendo en cuenta que, según (3.10), las constantes <strong>de</strong> tiempo en lazo cerrado<strong>de</strong>l controlador <strong>de</strong> Lyapunov son iguales al inverso <strong>de</strong> sus ganancias, se tiene que:k 1 ¡ 10 (3.51)k 2 ¡ 1 (3.52)Inicialmente se sitúa la referencia <strong>de</strong>l cuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo en 1¢ 1Wb 2 y lareferencia <strong>de</strong> la velocidad en 300rad el£ s (1432 r.p.m.). El par <strong>de</strong> carga es proporcional ala velocidad 0¢ con 001 Nmrad el scomo constante <strong>de</strong> proporcionalidad. A los 7 segundos seinvierte la referencia <strong>de</strong> velocidad provocando un cambio <strong>de</strong> giro en la máquina. A los14 segundos se da un escalón <strong>de</strong> par haciendo que la constante <strong>de</strong> proporcionalidad sea0¢ 003 Nmrad el sen lugar <strong>de</strong> 0¢ 001Nmrad el s . Por último en t ¡ 20s se disminuye la referencia <strong>de</strong>lcuadrado <strong>de</strong>l módulo <strong>de</strong>l flujo a la mitad.En la Figura 3.1 se muestra la simulación <strong>de</strong>l sistema en tiempo continuo. Comopue<strong>de</strong> apreciarse, las salidas se estabilizan en sus valores <strong>de</strong> referencia en aproximadamentecinco constantes <strong>de</strong> tiempo, <strong>de</strong> acuerdo con el diseño propuesto para los controladores,estando perfectamente <strong>de</strong>sacoplados el control <strong>de</strong> flujo <strong>de</strong>l <strong>de</strong> velocidad.Sin embargo, al igual que el controlador mediante linealización entrada-salida, elcontrolador <strong>de</strong> Lyapunov propuesto no pue<strong>de</strong> implantarse <strong>de</strong> forma analógica. A<strong>de</strong>más,
36 <strong>Control</strong> <strong>de</strong> Lyapunovψ 2 251.210.80.60.40.20051015203002001000-100-200-3000510ω R152025Figura 3.3: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto con periodo <strong>de</strong> muestreo<strong>de</strong> 0¢ 1msal ser un controlador no-lineal, no es posible realizar una discretización exacta, con locual la implantación digital <strong>de</strong>l controlador se reduce a añadir un retenedor <strong>de</strong> or<strong>de</strong>ncero en su salida. Por lo tanto, el efecto <strong>de</strong>l muestreo se traducirá en una perturbación<strong>de</strong>l controlador que mermará sus prestaciones, tal como pue<strong>de</strong> apreciarse en la figura3.2, don<strong>de</strong> se muestra una simulación <strong>de</strong>l controlador <strong>de</strong> Lyapunov cuando se implantaen tiempo discreto con periodo <strong>de</strong> muestreo <strong>de</strong> 1ms. Como se pue<strong>de</strong> observar existeun acoplamiento notable entre el controlador <strong>de</strong> flujo y el <strong>de</strong> velocidad y se produce ungran error <strong>de</strong> seguimiento <strong>de</strong> la velocidad en régimen permanente, igual a 45¢ 6rad el£ s(15¢ 2%), aunque mucho menor que el producido por el controlador mediante linealizaciónentrada-salida. Si se aumenta la frecuencia <strong>de</strong> muestreo a 10kHz se obtiene elresultado mostrado en la figura 3.3, en el que el acoplamiento disminuye notablemente yel error <strong>de</strong> seguimiento <strong>de</strong> la velocidad en régimen permanente baja a 5¢ 4rad el£ s (1¢ 8%).Cabe <strong>de</strong>stacar que en ambas simulaciones se ha supuesto conocido el par <strong>de</strong> cargaen las ecuaciones <strong>de</strong>l controlador (3.42). Sin embargo, en la mayoría <strong>de</strong> las aplicacionesprácticas dicho parámetro será <strong>de</strong>sconocido. Según se ha expuesto en la sección 3.2.2,los errores en el mo<strong>de</strong>lado <strong>de</strong> los términos L f h i ¡ x¢ <strong>de</strong> la planta se traducen en errores <strong>de</strong>seguimiento, según la ecuación (3.19). En este caso, si se <strong>de</strong>sprecia el par <strong>de</strong> carga en elcontrolador, es <strong>de</strong>cir, si se supone que éste vale cero, se producirá un error <strong>de</strong> seguimiento<strong>de</strong> la velocidad en régimen permanente que vendrá dado por:ỹ¡ ∆L f h 2 ¡ x¢2 ¡k 2¡¡P2Jm lk 2(3.53)En don<strong>de</strong> m l es el par <strong>de</strong> carga aplicado a la máquina. Nótese que este error <strong>de</strong> seguimientoen régimen permanente es inversamente proporcional a la inercia J <strong>de</strong>l accionamiento,por lo que será más notable en accionamientos <strong>de</strong> baja inercia, pudiendo ser <strong>de</strong>spreciable
3.3 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator 37ψ 2 251.41.210.80.60.40.20051015203002001000-100-200-3000510ω R152025Figura 3.4: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong>corriente y con un controlador <strong>de</strong> Lyapunov en tiempo discreto con periodo <strong>de</strong> muestreo<strong>de</strong> 1ms suponiendo m l ¡ 01.20.90.60.300510ψ 2 2515203002001000-100-200-3000510ω R152025Figura 3.5: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong> corrientey con un controlador <strong>de</strong> Lyapunov <strong>de</strong> alta ganancia implantado en tiempo discretocon T s ¡ 1ms suponiendo m l ¡ 0en accionamientos con inercia gran<strong>de</strong>.En la figura 3.4 se muestra una simulación en las mismas condiciones que la mostradaen la figura 3.2 pero <strong>de</strong>spreciando el par <strong>de</strong> carga en el controlador. Como se pue<strong>de</strong> apre-
38 <strong>Control</strong> <strong>de</strong> Lyapunovψ 2 2543.532.521.510.50051015203002001000-100-200-3000510ω R152025Figura 3.6: Evolución <strong>de</strong> las salidas <strong>de</strong>l motor alimentado con un inversor fuente <strong>de</strong> corrientey con un controlador <strong>de</strong> Lyapunov <strong>de</strong> alta ganancia implantado en tiempo discretocon T s ¡ 1ms suponiendo m l ¡ 0. Accionamiento con J ¡ 0¢ 1kgr ¤ m 2ciar el error en régimen permanente es ahora mayor que antes, siendo igual a 81¢ 9 rad el£ s3%) en t ¡ 7 s. Dicho error está producido por los efectos <strong>de</strong>l muestreo y por el error(27¢en el mo<strong>de</strong>lo. Según la ecuación (3.53), el error <strong>de</strong> seguimiento <strong>de</strong> la velocidad <strong>de</strong>bido alerror en el mo<strong>de</strong>lo es igual 43¢ a 6 rad el£ (14¢ s 5%) en ¡ t 7 s. Dado que tanto el motor<strong>de</strong> inducción como el controlador son sistemas no lineales, no tiene sentido aplicar aquíel principio <strong>de</strong> superposición. Sin embargo, se pue<strong>de</strong> observar que la ecuación (3.53)predice aproximadamente el incremento en el error <strong>de</strong> seguimiento producido al <strong>de</strong>spreciarseel valor <strong>de</strong>l par <strong>de</strong> carga en el controlador, ya que el incremento en el error <strong>de</strong>seguimiento entre la simulación realizada teniendo en cuenta el par <strong>de</strong> carga y la realizadaal <strong>de</strong>spreciar éste ha sido 36¢ <strong>de</strong> 3 rad el£ s. Conviene <strong>de</strong>stacar que si se simula el sistemaen tiempo continuo, el error <strong>de</strong> seguimiento producido concuerda con el predicho por laecuación (3.53).Para disminuir los errores en régimen permanente se pue<strong>de</strong>n aumentar los valores<strong>de</strong> las ganancias <strong>de</strong> los controladores k 1 y k 2 , aunque ahora el sistema evolucionará muchomás rápidamente pudiendo ocasionar saturaciones en el mando. Así, si se eligen lasganancias:k 1 ¡ 500 (3.54)k 2 ¡ 10 (3.55)Los errores <strong>de</strong> seguimiento <strong>de</strong>l flujo y <strong>de</strong> la velocidad disminuirán 50 y 10 veces respectivamentecon relación a la simulación anterior. A<strong>de</strong>más los controladores serán ahoramás rápidos, evolucionando el módulo <strong>de</strong>l flujo según una constante <strong>de</strong> tiempo <strong>de</strong> 2 ms yla velocidad lo hará con 100 ms.En la figura 3.5 pue<strong>de</strong> apreciarse que aunque el acoplamiento entre el flujo y la ve-
3.3 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator 39m l ¡ 0¢ 001 Nmrad el s¤ ω Rω R ¡ 289¢ 5J m 2 ỹ 2 ¡ 10¢¡ 0¢ 01kgr¤5ỹ 2e ¡ 5¢ 8ỹ 2¡ ỹ 2e 7 4¢ ¡ω R ¡ 298¢ 9J m 2 ỹ 2 ¡ 1¢¡ 0¢ 1kgr¤08ỹ 2e ¡ 0¢ 6ỹ 2¡ ỹ 2e 48 0¢ ¡m l 003 Nmrad ¡ ¤ 0¢el sω Rω R 7 ¡ 278¢ỹ 2 3 ¡ 21¢ỹ 2e 7 ¡ 16¢ỹ 2¡ ỹ 2e 6 4¢ ¡ω R ¡ 297¢ 7ỹ 2 ¡ 2¢ 27ỹ 2e ¡ 1¢ 78ỹ 2¡ ỹ 2e ¡ 0¢ 48Cuadro 3.1: Error <strong>de</strong> seguimiento <strong>de</strong> la velocidad en función <strong>de</strong> la inercia y <strong>de</strong>l par <strong>de</strong>carga.locidad sigue siendo apreciable, los errores <strong>de</strong> seguimiento son ahora aceptables, aunquesigue existiendo una fuerte <strong>de</strong>pen<strong>de</strong>ncia <strong>de</strong>l par <strong>de</strong> carga en el controlador <strong>de</strong> velocidad.Si se realiza la misma simulación, pero con un accionamiento en el que la inercia es iguala J ¡ 0¢ 1kgr¤ m 2 , se obtienen los resultados mostrados en la figura 3.6, en la que se pue<strong>de</strong>apreciar una disminución <strong>de</strong> los errores <strong>de</strong> seguimiento <strong>de</strong> la velocidad, aunque aumentala perturbación <strong>de</strong>l flujo durante los transitorios <strong>de</strong> velocidad.En la tabla 3.1 se resumen los errores <strong>de</strong> seguimiento <strong>de</strong> la velocidad, calculadosmediante simulación (ỹ 2 ) y mediante la expresión (3.53) (ỹ 2e ), en función <strong>de</strong>l par <strong>de</strong>carga (ml) y <strong>de</strong> la inercia (J) <strong>de</strong>l accionamiento. Nótese que la diferencia entre el error<strong>de</strong> seguimiento obtenido mediante simulación y el calculado con la expresión (3.53) esprácticamente in<strong>de</strong>pendiente <strong>de</strong>l par <strong>de</strong> carga. Esto justifica la utilidad <strong>de</strong> (3.53) parapre<strong>de</strong>cir el error <strong>de</strong> seguimiento <strong>de</strong>bido a no tener en cuenta el valor <strong>de</strong>l par <strong>de</strong> cargaen las ecuaciones <strong>de</strong>l controlador. Sin embargo, no conviene olvidar que este error <strong>de</strong>seguimiento es sólo una parte <strong>de</strong>l error <strong>de</strong> seguimiento total, que es <strong>de</strong>bido tanto al hecho<strong>de</strong> <strong>de</strong>spreciar el par <strong>de</strong> carga como a los efectos <strong>de</strong>l muestreo.Simulación con un inversor fuente <strong>de</strong> tensión controlado por corriente.Tal como se ha discutido en la sección 3.3.1, es mucho más ventajoso en la práctica eluso <strong>de</strong> un inversor fuente <strong>de</strong> tensión controlado por corriente frente a un inversor fuente<strong>de</strong> corriente. Sin embargo el uso <strong>de</strong> este tipo <strong>de</strong> inversores plantea una serie <strong>de</strong> problemasal existir siempre un cierto error entre la referencia <strong>de</strong> corriente y la corriente obtenida enla máquina. En este apartado se analiza mediante simulación el impacto <strong>de</strong> la velocidad<strong>de</strong> los controladores <strong>de</strong> corriente en el regulador <strong>de</strong> Lyapunov.En las figuras 3.7–3.12 se muestran los resultados <strong>de</strong> simulación <strong>de</strong> la máquina <strong>de</strong>inducción <strong>de</strong> 250 W simulada en el apartado anterior pero mo<strong>de</strong>lada ahora según (3.24–3.26), alimentada mediante un inversor <strong>de</strong> tensión con el controlador <strong>de</strong> corriente (3.50)y usando el controlador <strong>de</strong> Lyapunov (3.42) con las ganancias k 1 ¡ 10 y k 2 ¡ 1. Eltransitorio realizado es el mismo que en el apartado anterior.i s SdrEn la figura 3.7 se muestra la evolución <strong>de</strong> la corriente en eje d i s Sdy <strong>de</strong> su referenciacuando el controlador funciona en tiempo continuo con sus polos situados según una
40 <strong>Control</strong> <strong>de</strong> Lyapunov10.80.60.40.20-0.2-0.4-0.6-0.8-124.7524.824.8524.924.9525Figura 3.7: Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente en régimen permanente (– i s Sd – – is Sdr ).La constante <strong>de</strong> tiempo en lazo cerrado es igual a 4 ms.ψ 2 252.11.81.51.20.90.60.30051015209060300-30-60-900510ω R152025Figura 3.8: Evolución <strong>de</strong> las salidas. <strong>Control</strong>ador <strong>de</strong> corriente con 4ms <strong>de</strong> constante <strong>de</strong>tiempo en lazo cerradoconfiguración <strong>de</strong> Butterworth 2 <strong>de</strong> forma que la respuesta sea la <strong>de</strong> un sistema <strong>de</strong> segundoor<strong>de</strong>n con una pulsación natural no amortiguada <strong>de</strong> 250rad£ s . 3 Ahora bien, como se2 Amortiguamiento igual a 1¢¡ 23 Se ha elegido esta pulsación para que el mismo sistema <strong>de</strong> control funcione a<strong>de</strong>cuadamente en una implantaciónen tiempo discreto con un inversor funcionando a una frecuencia <strong>de</strong> muestreo <strong>de</strong> 1kHz.
3.3 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> estator 4110.80.60.40.20-0.2-0.4-0.6-0.8-124.9224.9324.9424.9524.9624.9724.9824.9925Figura 3.9: Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente en régimen permanente (– i s Sd – – is Sd r ).La constante <strong>de</strong> tiempo en lazo cerrado es igual a 0¢ 5 ms.pue<strong>de</strong> apreciar el controlador no sigue a la referencia, con lo que es <strong>de</strong> esperar que el sistemano se comporte a<strong>de</strong>cuadamente, tal como se pue<strong>de</strong> ver en la figura 3.8, en la que semuestra la evolución <strong>de</strong> las salidas <strong>de</strong>l sistema y en las que se pue<strong>de</strong> apreciar que aunqueel sistema es estable, presenta un gran error <strong>de</strong> seguimiento en régimen permanente. Enconcreto, el error <strong>de</strong> seguimiento <strong>de</strong> la velocidad es <strong>de</strong> 222¢ 7rad el£ s¡ 74¢ 2%¢ .Si se aumenta la velocidad <strong>de</strong>l controlador <strong>de</strong> corriente colocando la pulsación naturalno amortiguada en 2000rad£ s, el seguimiento <strong>de</strong> la referencia <strong>de</strong> corriente es bastantemejor, tal como se aprecia en la figura 3.9, con lo que mejora el comportamiento <strong>de</strong>lcontrolador <strong>de</strong> Lyapunov, aunque, tal como se muestra en la figura 3.10 no lo bastantecomo para evitar un cierto acoplamiento entre el flujo <strong>de</strong> rotor y la velocidad y pequeñoserrores <strong>de</strong> seguimiento en régimen permanente. En concreto, el error <strong>de</strong> seguimiento <strong>de</strong>la velocidad es ahora <strong>de</strong> 9¢ 1rad el£ s¡ 3¢ 03%¢ . Conviene <strong>de</strong>satacar que la aplicación entiempo discreto <strong>de</strong> este controlador exigiría una frecuencia <strong>de</strong> conmutación <strong>de</strong> al menos6 kHz, 4 la cual podría ser excesiva en una aplicación a motores <strong>de</strong> más potencia y exigiráuna gran rapi<strong>de</strong>z <strong>de</strong> cálculo al microprocesador.Para disminuir los errores <strong>de</strong> seguimiento producidos por los errores <strong>de</strong>l controlador<strong>de</strong> corriente se pue<strong>de</strong>n aumentar las ganancias <strong>de</strong>l controlador <strong>de</strong> Lyapunov. En las figuras3.11 y 3.12 se muestran los resultados <strong>de</strong> simulación <strong>de</strong>l sistema en el que se han elegidocomo ganancias <strong>de</strong>l controlador <strong>de</strong> Lyapunov 5 k 1 ¡ 300 y k 2 ¡ 10. A<strong>de</strong>más tanto el4 Valores razonables <strong>de</strong> la relación entre las constantes <strong>de</strong> tiempo en lazo cerrado y el periodo <strong>de</strong> muestreovarían en el rango <strong>de</strong> 3 a 10 (Pagola, 1994). Mayores periodos <strong>de</strong> muestreo son problemáticos <strong>de</strong>bidos a lanaturaleza no i<strong>de</strong>al <strong>de</strong> los retenedores y muestreadores. Periodos menores no producen una mejora <strong>de</strong>l comportamientosino todo lo contrario, pues hacen al controlador más sensible frente a los errores <strong>de</strong> cálculo <strong>de</strong>bidosa la precisión finita <strong>de</strong>l microprocesador.5 En el apartado anterior se eligió k 1 500, obteniéndose resultados satisfactorios. Sin embargo la constante<strong>de</strong> tiempo <strong>de</strong>l controlador <strong>de</strong> Lyapunov con esa ganancia es <strong>de</strong> 2ms, mucho mayor que la constante <strong>de</strong> tiempo<strong>de</strong>l regulador <strong>de</strong> velocidad, lo cual hace que el controlador sea inestable en este caso.
42 <strong>Control</strong> <strong>de</strong> Lyapunovψ 2 251.41.210.80.60.40.20051015203002001000-100-200-3000510ω R152025Figura 3.10: Evolución <strong>de</strong> las salidas. <strong>Control</strong>ador <strong>de</strong> corriente con 0¢ 5ms <strong>de</strong> constante<strong>de</strong> tiempo en lazo cerradoψ 2 2543210051015203752501250-125-250-3750510ω R152025Figura 3.11: Evolución <strong>de</strong> las salidas con el controlador <strong>de</strong> Lyapunov <strong>de</strong> alta gananciacontrolador <strong>de</strong> Lyapunov como el regulador <strong>de</strong> corriente se han implantado digitalmentecon una frecuencia <strong>de</strong> muestreo <strong>de</strong> 1 ms y se ha supuesto m l ¡ 0 en las ecuaciones <strong>de</strong>lcontrolador <strong>de</strong> Lyapunov.En la figura 3.11 se aprecia que si bien sigue existiendo un cierto acoplamiento entreel flujo y la velocidad, los errores <strong>de</strong> seguimiento son ahora mucho menores (28¢ 9rad el£ s¡ 9¢ 6%¢para la velocidad), a pesar <strong>de</strong>l error que se produce en el controlador <strong>de</strong> corriente, que se
3.4 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> flujo. . . 431.510.50-0.5-1-1.524.9124.9224.9324.9424.9524.9624.9724.9824.992525.01Figura 3.12: Respuesta <strong>de</strong>l regulador <strong>de</strong> corriente digital en régimen permanente (– i s Sd– – i s Sdr). La constante <strong>de</strong> tiempo en lazo cerrado es igual a 4 ms y la frecuencia <strong>de</strong>muestreo es <strong>de</strong> 1 kHz.pue<strong>de</strong> ver en la figura 3.12, lo cual ilustra la robustez <strong>de</strong>l controlador propuesto. Nótesesin embargo el acoplamiento intolerable entre el flujo y la velocidad en el cambio <strong>de</strong> sentido<strong>de</strong> giro <strong>de</strong> la máquina. Si se hubiese mo<strong>de</strong>lado la saturación <strong>de</strong>l hierro en la máquina,los resultados <strong>de</strong> la figura 3.11 merecerían una mayor atención.3.4. <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción enejes <strong>de</strong> flujo <strong>de</strong> rotorEn la sección 3.3 se ha mostrado que el control <strong>de</strong> Lyapunov implantado en ejes<strong>de</strong> estator presenta un acoplamiento notable entre el módulo <strong>de</strong>l flujo y la velocidadcuando se emplea como actuador un inversor fuente <strong>de</strong> tensión controlado por corrientey dicho controlador <strong>de</strong> corriente no es lo suficientemente rápido. Esto es <strong>de</strong>bido a que lascorrientes <strong>de</strong>l motor en un sistema <strong>de</strong> referencia fijo al estator pue<strong>de</strong>n tener frecuencias<strong>de</strong> 50 Hz o más, lo cual obliga al uso <strong>de</strong> controladores <strong>de</strong> corriente lo suficientementerápidos para seguir correctamente a las referencias. Por ejemplo en (Marino et al., 1996)se implanta un controlador <strong>de</strong> Lyapunov similar al <strong>de</strong>sarrollado en la sección 3.3 con unafrecuencia <strong>de</strong> muestreo <strong>de</strong>l controlador <strong>de</strong> tan solo 2 kHz. Sin embargo, aunque no estáclara cual es la frecuencia <strong>de</strong> muestreo <strong>de</strong> los controladores <strong>de</strong> corriente, el inversor tieneuna frecuencia <strong>de</strong> conmutación <strong>de</strong> 15 kHz.En esta sección se muestra que la implantación <strong>de</strong> los controladores en ejes <strong>de</strong> flujo<strong>de</strong> rotor es muy ventajosa ya que en este sistema <strong>de</strong> referencia las variables <strong>de</strong> estado soncontinuas o <strong>de</strong> variación lenta, con lo que la exigencia <strong>de</strong> velocidad a los controladoreses mucho menor, pudiéndose implantar todo el sistema con una frecuencia <strong>de</strong> muestreo
¡¢¡¢¦¡¢¦¢¡¢¦44 <strong>Control</strong> <strong>de</strong> Lyapunov<strong>de</strong> 1 kHz sin per<strong>de</strong>r prestaciones (Briz <strong>de</strong>l Blanco, 1995).El mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes <strong>de</strong> flujo <strong>de</strong> rotor se muestra en el apéndice A,y viene dado por:A¤ ¡¥¢x¤ ¡¥¢B¤ ¡¥¢ddti r Sdi r Sqψ r Rd£¥¤¦ ¡ψ r Rq ¡ 0dω Rdt¡A ω S BD 0 E¡ ω S A ¡ Cω R£¥¤i r Sdi r Sqψ r Rd£¥¤F 00 F0 0£¥¤u¦u r Sdu r (3.56)¡£¢ ¤Sq§¡ e¡ ¢¡P2J m m l (3.57)m e Gψ r Rd ir Sq (3.58)En don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes y viene dada por:ω S ¡ ω R¢Di r Sqψ r Rd(3.59)Si se <strong>de</strong>finen como salidas <strong>de</strong>l sistema el flujo en eje d (que coincidirá con su módulo)y la velocidad <strong>de</strong> giro <strong>de</strong>l rotor:y 1 ¡ ψ r Rdy 2 ¡ ω RLos errores <strong>de</strong> seguimiento vendrán dados por:ỹ 1 ¡ y 1¡ y 1r ¡ ψ r Rd¡ ψ r Rdr(3.60)ỹ 2 ¡ y 2¡ y 2r ¡ ω R¡ ω Rr (3.61)y se pue<strong>de</strong> establecer como candidata a función <strong>de</strong> Lyapunov para garantizar la estabilidad<strong>de</strong>l sistema en bucle cerrado:V t ¡122∑i 12 1 2ỹ i y 12¨˜¢¡y˜2 (3.62)2©El grado relativo <strong>de</strong> las salidas con respecto a las tensiones es <strong>de</strong> dos, tal como semuestra en la sección 2.4, pero respecto <strong>de</strong> las corrientes es <strong>de</strong> uno. Las <strong>de</strong>rivadas <strong>de</strong> Lie<strong>de</strong> las salidas respecto a las corrientes son:La matriz E¡ x¢ será igual a:L f h 1 ¡ x¢ ¡ Eψ r Rd (3.63)L g1 h 1 ¡ x¢ ¡ D (3.64)L g2 h 1 ¡ x¢ ¡ 0 (3.65)¡ x¢ ¡ ¡¡ x¢ ¡PL f h 22J m l (3.66)L g1 h 2 0 (3.67)L g2 h 2 ¡ x¢ ¡P2J Gψr Rd (3.68)x¢¦D 0P0E¡ ¡2JGψ r (3.69)Rd§
¦A¢¢¡¡¢£3.4 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> flujo. . . 45Y la ecuación <strong>de</strong>l controlador, aplicando (3.14):¦i r Sdi r Sq§¡¦1D002JPGψ r Rd§¦¡ k 1 ỹ 1¡ Eψ r Rd¢ ddtψ r Rdr¡ k 2 ỹ 2¢ P2Jm l¢ ddtω Rr§(3.70)Que pue<strong>de</strong> expresarse como:¦i r Sdi r Sq§¡¢k ¡ 1 y˜¡ 1 Eψ r Rd¡Dk ¡ 2 ˜ddt ψr Rd rRr¢ y 2ddt ω 2JP m lGψ r Rd¦(3.71)Nótese que en la ecuación anterior interviene el par <strong>de</strong> carga m l en el cálculo <strong>de</strong> lacorriente i r Sq . Si k 2J2y˜2 Pes mucho mayor que el par <strong>de</strong> carga, éste podrá <strong>de</strong>spreciarse endicha ecuación y por tanto no tendrá que ser medido ni estimado; pero para accionamientos<strong>de</strong> baja inercia, y con medida ruidosa <strong>de</strong> la velocidad que no permiten usar una k 2<strong>de</strong>masiado elevada para no amplificar el ruido, el par <strong>de</strong> carga no podrá ser <strong>de</strong>spreciadosi no se quiere tener un error apreciable en régimen permanente.3.4.1. <strong>Control</strong> <strong>de</strong>l inversor en modo corriente en ejes <strong>de</strong> flujoEn la ecuación (3.71) se pue<strong>de</strong> observar que las salidas <strong>de</strong>l controlador <strong>de</strong> Lyapunovson las corrientes en ejes <strong>de</strong> rotor i r Sd e ir Sq . Es por tanto necesario alimentar al motorcon un inversor fuente <strong>de</strong> corriente o con un inversor fuente <strong>de</strong> tensión controlado porcorriente. Esta última alternativa presenta numerosas ventajas, tal como se ha discutidoen la sección 3.3.1 y va a ser la única estudiada en esta sección.La dinámica <strong>de</strong>l estator <strong>de</strong> la máquina se obtiene <strong>de</strong> la ecuación (3.56):ddt¦i r Sdi r Sq§¡ω SA¤ ¡¥¢¡ ω S A§x¦i r ¢ Sdi¡¥¢¤rSq§B¦F 0¤¡¥¢0 F§u¦u r Sdu r ¢¡¥¢ ¤Sq§¦Bp¡£¢¤ψ r Rd (3.72)P¤ ¡£¢Cω R§ ¡Don<strong>de</strong> se pue<strong>de</strong> apreciar que están acopladas ambas corrientes. Si se quiere controlar cadacorriente por separado es necesario incluir una realimentación no lineal para conseguir<strong>de</strong>sacoplar el sistema:Fv r ¡ Sd ω S i r ¢SqFv r Sq ¡ ¡ ω S i r SdFu r SdBψ r RdFu r Sq¡ Cω R ψ r Rdu r Sd v r ω S i r ¢SqF¡ Sd¡Con lo que el sistema original (3.72) se transforma en:Bψ r Rdu r Sq v r ¢ ω S i r ¢Sd¡ SqCω R ψ r RdF(3.73)(3.74)ddt¦i r Sdi r Sq§¡A¦A 0¤¡¥¢0 A§x¦i r ¢ Sdi¡¥¢¤rSq§B¦F 0¤¡¥¢0 F§v¦v r Sdv r (3.75)¡£¢ ¤Sq§Que como se pue<strong>de</strong> apreciar forman dos sistemas una entrada - una salida totalmente<strong>de</strong>sacoplados <strong>de</strong> la forma:ddt ir ¡ Sx Ai r Sx Fv r Sx (3.76)Si se aumenta el sistema para incluir una integración se obtiene:ddt¦i r Sxi r Sx§¡¦A 01 0§¦i r Sxi r Sx§¢¦F0§v r Sx (3.77)
46 <strong>Control</strong> <strong>de</strong> Lyapunovψ r Rdrω Rr<strong>Control</strong>adorLyapunovi r Sdri r Sq rInversor fuente <strong>de</strong> tensióncontroladov r por corrienteSdu r SdPIv r Des.Sq u r SqPIDes.dq/rstgiroejes∆αi r Sdi r Sqαdq/rsti Ri Sαψ r Rdpol/carω Rψ s RFigura 3.13: Diagrama <strong>de</strong> bloques <strong>de</strong>l accionamientoSiendo posible diseñar un controlador en variables <strong>de</strong> estado mediante asignación <strong>de</strong>polos para este sistema. La ecuación <strong>de</strong>l controlador será entonces:v r Sx ¡ K pK I¡¦ir Sx¡ i r Sxr¨i r Sx¡ i r Sxr©§(3.78)En don<strong>de</strong> i r Sxr es la referencia <strong>de</strong> corriente y K p y K I son las ganancias <strong>de</strong> la acciónproporcional e integral respectivamente.3.4.2. Detalles <strong>de</strong> implementaciónEn la figura 3.13 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento que comopue<strong>de</strong> observarse es similar al mostrado para el control mediante linealización entradasalidaen ejes <strong>de</strong> flujo <strong>de</strong> rotor (figura 2.8).En primer lugar, en el bloque “pol/car”, se calcula el módulo y el ángulo <strong>de</strong>l vector<strong>de</strong> flujo medido (o estimado) en ejes <strong>de</strong> estator según las ecuaciones:ψ r Rd ¡ ψ s Rd 2 ¢ ψ s Rq 2 (3.79)α ¡ arctan ψs Rqψ s Rd(3.80)El módulo coinci<strong>de</strong> con la componente ψ r R<strong>de</strong>n ejes <strong>de</strong> flujo <strong>de</strong> rotor y su ángulo α es elángulo formado entre los ejes <strong>de</strong> estator y los ejes <strong>de</strong> flujo <strong>de</strong> rotor.En los bloques “dq/rst” se realizan las transformaciones <strong>de</strong> Park para convertir entremagnitu<strong>de</strong>s trifásicas y vectores en ejes d-q <strong>de</strong> flujo <strong>de</strong> rotor. Para convertir las corrientesse usa el ángulo <strong>de</strong>l flujo <strong>de</strong> rotor α, pero para convertir las tensiones obtenidas porel controlador a magnitu<strong>de</strong>s trifásicas, es necesario tener en cuenta el giro <strong>de</strong> los ejesdurante el periodo <strong>de</strong> muestreo en la implantación digital (García Cerrada, 1991). Paraello se suma al ángulo α el ángulo recorrido por los ejes <strong>de</strong> flujo <strong>de</strong> rotor en medioperiodo <strong>de</strong> muestreo, el cual se obtiene en el bloque “giro ejes” mediante:∆α ¡ ω ST s2(3.81)
3.4 <strong>Control</strong> <strong>de</strong> Lyapunov <strong>de</strong> la máquina <strong>de</strong> inducción en ejes <strong>de</strong> flujo. . . 471.210.80.60.40.200510ψ r Rd1520253002001000-100-200-3000510ω R152025Figura 3.14: Evolución <strong>de</strong> las salidas con los controladores implantados en ejes <strong>de</strong> flujo<strong>de</strong> rotor (– salidas, - - referencias)En don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes <strong>de</strong> flujo <strong>de</strong> rotor, que viene dada por laecuación (3.59).En el bloque “<strong>Control</strong>ador Lyapunov” se implanta el controlador <strong>de</strong> Lyapunov <strong>de</strong>finidopor la ecuación (3.71), que a partir <strong>de</strong> las medidas <strong>de</strong> flujo y velocidad y <strong>de</strong> sus referenciascalcula las corrientes <strong>de</strong> estator en ejes <strong>de</strong> flujo. Estas corrientes son las referencias <strong>de</strong>los controladores <strong>de</strong> corriente <strong>de</strong>l inversor, los cuales constan <strong>de</strong> un control PI (ecuación3.78) más las ecuaciones <strong>de</strong> <strong>de</strong>sacoplo (3.73) y (3.74). Las salidas <strong>de</strong> los controladores<strong>de</strong> corriente son las tensiones en ejes <strong>de</strong> flujo <strong>de</strong> rotor, que <strong>de</strong>spués <strong>de</strong> convertirse a ejes<strong>de</strong> estator sirven <strong>de</strong> referencia para el inversor fuente <strong>de</strong> tensión.Por último, conviene <strong>de</strong>stacar que en la aplicación final tanto el controlador <strong>de</strong> Lyapunovcomo los reguladores PI se implantarán digitalmente en un microprocesador. Portanto será necesario tener en cuenta que se produce un retraso adicional <strong>de</strong> un periodo <strong>de</strong>muestreo <strong>de</strong>bido al tiempo <strong>de</strong> cálculo <strong>de</strong> microprocesador. En el apéndice E se muestranlas modificaciones realizadas al controlador diseñado en la sección 3.4.1 para tener encuenta este retraso.3.4.3. Resultados <strong>de</strong> simulaciónPara ilustrar el funcionamiento <strong>de</strong>l controlador propuesto, comparándolo con el implantadoen ejes <strong>de</strong> estator, se ha realizado una simulación <strong>de</strong>l motor <strong>de</strong> 250 W, la cual semuestra en la figura 3.14. El motor se ha mo<strong>de</strong>lado en ejes <strong>de</strong> estator según (3.24–3.26) yse le ha aplicado el controlador <strong>de</strong> Lyapunov en ejes <strong>de</strong> flujo <strong>de</strong> rotor (3.71), teniendo encuenta los <strong>de</strong>talles <strong>de</strong> implementación discutidos en el apartado 3.4.2. Las ganancias <strong>de</strong>lcontrolador <strong>de</strong> Lyapunov son k 1 ¡ 500 y k 2 ¡ 10 y se ha <strong>de</strong>spreciado el término m l en lasecuaciones <strong>de</strong>l controlador. El controlador <strong>de</strong> corriente se ha diseñado con una pulsaciónnatural no amortiguada <strong>de</strong> 250rad£ s y un amortiguamiento <strong>de</strong> 1£¡ 2. Ambos reguladoresse implantan en tiempo discreto con un periodo <strong>de</strong> muestreo <strong>de</strong> 1 ms. El transitorio usado
48 <strong>Control</strong> <strong>de</strong> Lyapunov1.210.80.60.40.200510ψ r Rd152025ω R 253002001000-100-200-30005101520Figura 3.15: Evolución <strong>de</strong> las salidas <strong>de</strong>l accionamiento con inercia elevada (– salidas, -- referencias)para la simulación es el mismo que se ha utilizado para el controlador en ejes <strong>de</strong> estatorsalvo que inicialmente se establece el flujo <strong>de</strong> rotor antes <strong>de</strong> que la máquina comience agirar, pues <strong>de</strong> lo contrario la simulación no converge.Tal como se pue<strong>de</strong> apreciar en la figura 3.14, el acoplamiento entre el flujo <strong>de</strong> rotor yla velocidad es ahora <strong>de</strong>spreciable frente al obtenido con el controlador en ejes <strong>de</strong> estator(figura 3.11). A<strong>de</strong>más los errores <strong>de</strong> seguimiento también son mucho menores, aunque la<strong>de</strong>pen<strong>de</strong>ncia con el par <strong>de</strong> carga es notable.Según se ha mostrado en la sección 3.4, el error <strong>de</strong> seguimiento <strong>de</strong> la velocidad producidoal <strong>de</strong>spreciar el par <strong>de</strong> carga en las ecuaciones <strong>de</strong>l controlador es inversamenteproporcional a la inercia <strong>de</strong>l accionamiento. Si se repite la simulación anterior para un accionamientocon una inercia 10 veces mayor (J ¡ 0¢ 1kgr¤ m 2 ), se obtienen los resultadosmostrados en la figura 3.15, en don<strong>de</strong> se pue<strong>de</strong> apreciar que los errores <strong>de</strong> seguimientodisminuyen a valores aceptables. Nótese que las referencias cambian ahora según rampas<strong>de</strong> pendiente limitada para evitar que se produzca un acoplamiento excesivo entre el flujoy la velocidad durante los transitorios que llegan a hacer inestable al controlador.En la tabla 3.2 se muestran los errores <strong>de</strong> seguimiento <strong>de</strong> la velocidad, calculados mediantesimulación (ỹ 2 ) y mediante la expresión (3.53) (ỹ 2e ), en función <strong>de</strong>l par <strong>de</strong> carga(ml) y <strong>de</strong> la inercia (J) <strong>de</strong>l accionamiento. Si se comparan con los obtenidos mediante elcontrolador en ejes <strong>de</strong> estator, mostrados en la tabla 3.1, se pue<strong>de</strong> concluir que en la implantaciónen ejes <strong>de</strong> flujo, el error <strong>de</strong> seguimiento producido es causado principalmentepor el hecho <strong>de</strong> <strong>de</strong>spreciar el par <strong>de</strong> carga en el controlador. Otros problemas no parecenahora tan significativos como en la implantación en ejes <strong>de</strong> estator.
3.5 Conclusiones 49m l ¡ 0¢ 001 Nmrad el s¤ ω Rω R ¡ 294¢ 3J m 2 ỹ 2 ¡ 5¢¡ 0¢ 01kgr¤71ỹ 2e ¡ 5¢ 89ỹ 2¡ ỹ 2e 18 0¢ ¡ ¡ω R ¡ 299¢ 42J 1kgr m 2 ỹ 2 ¡ 0¢¡ 0¢581¤ỹ 2e ¡ 0¢ 599ỹ 2¡ ỹ 2e 018 0¢ ¡ ¡m l ¡ 0¢ 003 Nmrad el s¤ ω Rω R ¡ 283¢ 1ỹ 2 ¡ 16¢ 89ỹ 2e ¡ 16¢ 99ỹ 2¡ ỹ 2e ¡ ¡ 0¢ 1ω R ¡ 298¢ 22ỹ 2 ¡ 1¢ 781ỹ 2e ¡ 1¢ 789ỹ 2¡ ỹ 2e ¡ ¡ 0¢ 008Cuadro 3.2: Error <strong>de</strong> seguimiento <strong>de</strong> la velocidad en función <strong>de</strong> la inercia y <strong>de</strong>l par <strong>de</strong>carga.3.5. ConclusionesEn este capítulo se ha presentado una técnica <strong>de</strong> control no lineal basada en unafunción <strong>de</strong> Lyapunov que hace ten<strong>de</strong>r a cero los errores <strong>de</strong> seguimiento. Se ha implantadodicha técnica a un motor <strong>de</strong> inducción mo<strong>de</strong>lado en ejes <strong>de</strong> estator y en ejes <strong>de</strong> flujo <strong>de</strong>rotor, mostrándose que en este último caso se produce un menor acoplamiento entre elflujo <strong>de</strong> rotor y la velocidad y que los errores <strong>de</strong> seguimiento son aceptables. Sin embargoen una aplicación práctica en la que el par <strong>de</strong> carga es <strong>de</strong>sconocido, el regulador presentauna gran <strong>de</strong>pen<strong>de</strong>ncia frente a dicho par <strong>de</strong> carga cuando la inercia <strong>de</strong>l accionamiento esbaja, lo que hace que su comportamiento en este caso no sea <strong>de</strong>l todo satisfactorio.Para evitar la <strong>de</strong>pen<strong>de</strong>ncia <strong>de</strong>l controlador con respecto al par <strong>de</strong> carga, en (Marinoet al., 1996) se estima dicho par <strong>de</strong> carga, <strong>de</strong>mostrandose mediante una función <strong>de</strong>Lyapunov que el sistema es estable y experimentalmente que el error en régimen permanentees <strong>de</strong>spreciable. En esta tesis, según se expone en el capítulo 4, se ha seguido unaaproximación distinta, consistente en añadir a la función <strong>de</strong> Lyapunov una integral <strong>de</strong> loserrores <strong>de</strong> seguimiento, con lo que se consigue un controlador robusto, no solo frente avariaciones <strong>de</strong>l par <strong>de</strong> carga, sino también frente a variaciones en los <strong>de</strong>más parámetros<strong>de</strong> la máquina.
50 <strong>Control</strong> <strong>de</strong> Lyapunov
Capítulo 4<strong>Control</strong> Lyapunov-Integral4.1. IntroducciónSegún se ha mostrado en los capítulos 2 y 3, tanto el control mediante linealizaciónentrada-salida como el control <strong>de</strong> Lyapunov son muy sensibles a errores en los parámetros<strong>de</strong> la máquina, a las perturbaciones en el par <strong>de</strong> carga y a los efectos <strong>de</strong>l muestreo en susimplantaciones en tiempo discreto. En este capítulo se propone un método <strong>de</strong> control másrobusto en el que, basándose en las i<strong>de</strong>as <strong>de</strong> control lineal, se ha añadido una integral <strong>de</strong>los errores <strong>de</strong> seguimiento a una función <strong>de</strong> Lyapunov. Por este motivo a este controladorse le llama aquí control Lyapunov-Integral. Ésta es una <strong>de</strong> las aportaciones principales<strong>de</strong> esta tesis y se mostrará en este capítulo como el comportamiento <strong>de</strong>l controlador essatisfactorio, incluso cuando se implanta en tiempo discreto y no se conoce el par <strong>de</strong>carga <strong>de</strong>l accionamiento.En la sección 4.2 se presentan los fundamentos <strong>de</strong>l controlador Lyapunov-Integral,analizándose la influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en el controlador y diseñándoseuna estrategia <strong>de</strong> anti-windup para el término integral. A continuación, en la sección 4.3,se presenta la aplicación <strong>de</strong> un controlador Lyapunov-Integral a una máquina <strong>de</strong> inducciónmo<strong>de</strong>lada en ejes <strong>de</strong> flujo <strong>de</strong> rotor, analizándose el efecto <strong>de</strong> las variaciones <strong>de</strong> lainercia y <strong>de</strong>l par <strong>de</strong> carga sobre el controlador. Por último, se presentan unos resultados<strong>de</strong> simulación que permiten validar el comportamiento <strong>de</strong>l controlador propuesto.4.2. Fundamentos <strong>de</strong> control Lyapunov-IntegralConsidérese un sistema <strong>de</strong> la forma:ddt x ¡ f¡ x¢¢G¡ x¢ u (4.1)y ¡ h¡ x¢ (4.2)en don<strong>de</strong> x es el vector <strong>de</strong> estado £ (n 1), u es el vector <strong>de</strong> entrada £ (m 1), f y h sondos campos vectoriales “suaves” <strong>de</strong> R n R n y R n R m , respectivamente y G es unvector (1£ fila m) <strong>de</strong> campos vectoriales “suaves” <strong>de</strong> R n R n . Se <strong>de</strong>finen los errores <strong>de</strong>seguimiento como:ỹ ¡ y¡ y r (4.3)
V t ¡52 <strong>Control</strong> Lyapunov-Integraldon<strong>de</strong> y r es la referencia <strong>de</strong>l vector <strong>de</strong> salida. Para garantizar que los errores <strong>de</strong> seguimientotien<strong>de</strong>n a cero, incluso cuando existen errores en los parámetros, se pue<strong>de</strong> establecercomo candidata a función <strong>de</strong> Lyapunov:12 ∑ iỹ i¢I i ỹ i dt¡2(4.4)que es una función semi<strong>de</strong>finida positiva <strong>de</strong> los errores <strong>de</strong> seguimiento ỹ i y <strong>de</strong> sus integralesỹ i , ya que V t 0 si: ¡y también si:ỹ i ¡ 0 y ỹ i ¡ 0 (4.5)ỹ i¢I i ỹ i dt ¡ 0 (4.6)La ecuación (4.6) se cumple cuando los errores <strong>de</strong> seguimiento siguen las trayectorias:ỹ i ¡ c i ¤ e ¡I i t(4.7)en don<strong>de</strong> c i es una constante <strong>de</strong> integración.La <strong>de</strong>rivada <strong>de</strong> V t en (4.4) es:ddt V t ¡ ∑iỹ i¢I iỹ i dt¡ ¤ddt ỹi ¢ I i ỹ i¡ (4.8)Si es posible diseñar un controlador que haga que las <strong>de</strong>rivadas <strong>de</strong> los errores <strong>de</strong> seguimientovalgan:La <strong>de</strong>rivada <strong>de</strong> V t vendrá dada por:ddt ỹi ¡ ¡ k i ỹ i¢ddt V t ¡ ∑i¡k i ỹ i¢I i ỹ i dt¡ ¡ I i ỹ i (4.9)I i ỹ i dt¡2(4.10)Que es una función semi<strong>de</strong>finida negativa.A la vista <strong>de</strong> estos resultados no es posible aplicar el teorema <strong>de</strong> estabilidad <strong>de</strong> Lyapunovya que V t es una función semi<strong>de</strong>finida positiva. Sin embargo se ha mostrado que elconjunto E en el cual V t y su <strong>de</strong>rivada es cero consiste en el origen (4.5) y las trayectoriasỹ i ¡ c i eI¤ i t . Este conjunto es un conjunto invariante, con lo que aplicando el principio<strong>de</strong> invarianza <strong>de</strong> La Salle (Khalil, 1996) se pue<strong>de</strong> concluir que cualquier solución <strong>de</strong>l¡sistema (4.1-4.3) convergerá al conjunto E. A<strong>de</strong>más, dado que todas las trayectorias <strong>de</strong>lconjunto E tien<strong>de</strong>n a cero cuando t ∞, el sistema en lazo cerrado tendrá un punto <strong>de</strong>equilibrio asintóticamente estable en ỹ i ¡ 0.Al igual que en el controlador <strong>de</strong> Lyapunov, la <strong>de</strong>rivada <strong>de</strong> las salidas se pue<strong>de</strong> expresarcomo (Slotine y Li, 1991):ddt y i ¡ L f h i ¡ x¢¢m∑j 1L gj h i ¡ x¢ u j (4.11)en don<strong>de</strong> L f h¡ x¢ es la <strong>de</strong>rivada <strong>de</strong> Lie <strong>de</strong> la función h¡ x¢ con respecto al campo vectorialf¡ x¢ .Si el grado relativo <strong>de</strong> todas las salidas es uno, para cada salida y i al menos uno <strong>de</strong> lostérminos L gj h i ¡ x¢ será distinto <strong>de</strong> cero y la entrada u j aparecerá en la <strong>de</strong>rivada <strong>de</strong> dicha
¡¡¢£¥¤¤¦¢¡¡¢¡¡¢¡¡¢¦¡¤¡¡¢¦¡¤¡¡¢¡¡¢¡¡¡¢£¥¤¤¦¢£¥¤¤4.2 Fundamentos <strong>de</strong> control Lyapunov-Integral 53salida y i . En esta situación será posible diseñar un controlador que fuerce la entrada u <strong>de</strong>forma que se verifique (4.9) para cada una <strong>de</strong> las salidas. En este caso la dinámica <strong>de</strong> loserrores <strong>de</strong> seguimiento <strong>de</strong>l sistema en bucle cerrado vendrá dada por (4.9), que es unaecuación diferencial <strong>de</strong> segundo or<strong>de</strong>n cuya solución es:ỹ i ¡ c 1i e ¡ I i t ¢ c 2i e ¡ k i t(4.12)Pudiéndose <strong>de</strong>mostrar que si en t ¡ 0 tanto las salidas <strong>de</strong>l sistema como las integrales <strong>de</strong>los errores <strong>de</strong> seguimiento valen cero, las constantes <strong>de</strong> integración c 1i y c 2i vienen dadaspor:4.2.1. Ecuaciones <strong>de</strong>l controladorc 1i ¡ ¡ c 2iI ik ic 2i ¡ ¡ y rik ik i¡ I i(4.13)A partir <strong>de</strong> (4.11), la <strong>de</strong>rivada <strong>de</strong> las salidas se pue<strong>de</strong> escribir en forma vectorial como:ddty 1£¥¤¤.y m¦¡L f h 1 x¢ ¡.L f h m ¡ x¢E¡ x¢ u (4.14)En don<strong>de</strong> los elementos <strong>de</strong> la matriz E¡ x¢ <strong>de</strong> ¡ m£ m¢ se pue<strong>de</strong>n <strong>de</strong>ducir fácilmente apartir <strong>de</strong> (4.11).La ecuación (4.9) se pue<strong>de</strong> escribir en forma vectorial como:ddt£ ¤y 1¡ y 1r..y m¡ y mr¡k 1 ¡ ỹ 1¢k m ¡ ỹ m¢¢I 1 ỹ 1 dt¢..¢I m ỹ m dt¢£ ¤¤I 1 ỹ 1I m ỹ mteniendo en cuenta (4.14), la ecuación (4.15) se pue<strong>de</strong> escribir como:¦(4.15)L f h 1 x¢ ¡.L f h m ¡ x¢E¡ x¢ u¡ddt£¥¤y 1r.y mrk 1 ¡ ỹ 1¢k m ¡ ỹ m¢I 1 ỹ 1 dt¢¢.I m ỹ m dt¢¢£¥¤¤I 1 ỹ 1I m ỹ m¦(4.16)Si la matriz E¡ x¢ no es singular en el dominio <strong>de</strong> interés, la ecuación <strong>de</strong>l controladorLyapunov-Integral vendrá dada por:u ¡ E¡ x¢¡ 1¤k ¡ 1 ỹ ¡¢1k ¡ m ỹ ¡¢mI 1 ỹ 1 dt¢ ¡ I 1 ỹ 1¡ L f h 1 ¡ x¢¢ ddt y 1r..I m ỹ m dt¢ ¡ I m ỹ m¡ L f h m ¡ x¢¢ ddt y mr¦(4.17)4.2.2. Influencia <strong>de</strong> los errores <strong>de</strong> mo<strong>de</strong>lado en el controlador Lyapunov-IntegralLas prestaciones <strong>de</strong>l controlador empeorarán si el mo<strong>de</strong>lo <strong>de</strong> la planta no es correcto.Si existen errores en el mo<strong>de</strong>lado <strong>de</strong>l valor <strong>de</strong> L f h i ¡ x¢ , <strong>de</strong> forma que el valor <strong>de</strong>l mo<strong>de</strong>loes igual a:L f h i ¡ x¢¢∆L f h i ¡ x¢ (4.18)Valor real¡¥¢ ¤Error¤¡¥¢
¡¡¢¡¡¢¡¡¢¢£¥¤¤2¡¡¢¦¤¤¢¡¡¢¤ £¤£¥¤¤54 <strong>Control</strong> Lyapunov-Integralla ecuación <strong>de</strong>l controlador (4.17) vendrá dada ahora por:u ¡ E¡ x¢¡ 1¤k ¡ 1 ỹ ¡¢1k ¡ m ỹ ¡¢mI 1 ỹ 1 dt¢ ¡ I 1 ỹ 1¡ L f h 1 ¡ x¢ ¡ ∆L f h 1 ¡ x¢¢ ddt y 1r..I m ỹ m dt¢ ¡ I m ỹ m¡ L f h m ¡ x¢ ¡ ∆L f h m ¡ x¢¢ ddt y mr¦(4.19)En esta situación, la aplicación <strong>de</strong>l controlador (4.19) al sistema, no dará lugar a ladinámica en bucle cerrado expresada por la ecuación (4.9). Sustituyendo (4.19) en (4.14),la dinámica <strong>de</strong> los errores <strong>de</strong> seguimiento <strong>de</strong>l sistema sometido a errores <strong>de</strong> mo<strong>de</strong>lado sepue<strong>de</strong> expresar como:ddtỹ 1£ ¤¤.ỹ m¦¡k ¡ 1 ỹ ¡¢1k ¡ m ỹ ¡¢m£ ¤I 1 ỹ 1 dt¢ ¡ I 1 ỹ 1.I m ỹ m dt¢ ¡ I m ỹ m.∆L ¡ f h 1 x¢ ¡∆L ¡ f h m x¢ ¡¦(4.20)Los puntos <strong>de</strong> equilibrio <strong>de</strong> este sistema en lazo cerrado son aquellos en los que los errores<strong>de</strong> seguimiento y sus <strong>de</strong>rivadas valen cero, <strong>de</strong> forma que las integrales permanezcanconstantes. Por tanto:¡¡ỹ 1 dt∆L ¡ f h 1 x¡k 1 I 1£¥¤. ¦ .(4.21)¦¡¡∆Lỹ m dtf h m x¡k m I mPara estudiar la estabilidad <strong>de</strong>l sistema cuando existen errores en el mo<strong>de</strong>lado, se pue<strong>de</strong><strong>de</strong>finir como candidata a función <strong>de</strong> Lyapunov la función:V t ¡12 ∑ iỹ i¢I i ỹ i dt ∆L fh i ¡ x¢k ¢ i¡2(4.22)que es una función semi<strong>de</strong>finida positiva, ya que es igual a cero si ỹ i ¡ 0 mientras secumple (4.21) y también cuando ỹ i sigue las trayectorias:La <strong>de</strong>rivada <strong>de</strong> V t en (4.22) es:ddt V t ¡ ∑iỹ iI¡ c i e ¤ i t Ie i¤ ¡t d ∆L f h i ¡ x¢dt¢ ¡ k ¡ i¡ỹ i¢∆L f h iI¡ x¢i ỹ i dt ¢ k ique teniendo en cuenta (4.20) se pue<strong>de</strong> transformar en:ddt V t ¡ ∑i¡k i ỹ i¢I i ỹ i dt ∆L fh i ¡ x¢k ¢ i¡ỹ i¢¤d d ∆Ldt ỹi¢ f h i ¡Ix¢i ỹ idt¢ k i¡ ¡¢I i ỹ i dt ∆L fh i ¡ x¢k ¢ ie ¡ I i t dt (4.23)(4.24)¤d ∆L f h i ¡ x¢(4.25)dt k i¡d ∆LSi f h i x¡dt ¡ k i0, la <strong>de</strong>rivada <strong>de</strong> V t será semi<strong>de</strong>finida negativa, pudiéndose aplicar entoncesel principio <strong>de</strong> invarianza <strong>de</strong> La Salle para establecer que el punto <strong>de</strong> equilibrio:ỹ i 0 y∆L ¡ f h i ¡ x¢¡ ỹ i ¡ dt (4.26)k i I ies estable. Sin embargo, la estabilidad <strong>de</strong>l sistema no se pue<strong>de</strong> garantizar mediante lafunción (4.22) en un caso general.Aunque este resultado es muy débil, será aplicable al estudio <strong>de</strong> la estabilidad <strong>de</strong>lcontrolador Lyapunov-Integral aplicado a un motor <strong>de</strong> inducción cuando existen erroresen el mo<strong>de</strong>lado <strong>de</strong>l par <strong>de</strong> carga.
¤¢4.2 Fundamentos <strong>de</strong> control Lyapunov-Integral 554.2.3. <strong>Control</strong> Lyapunov-Integral bajo saturación <strong>de</strong> la salidaTodos los sistemas <strong>de</strong> control aplicados en la práctica están sometidos a restricciones.Por ejemplo, en el caso <strong>de</strong> un motor <strong>de</strong> inducción tanto la tensión como la corriente quepue<strong>de</strong> generar el inversor está limitada. Así pues, si se tiene en cuenta la limitación <strong>de</strong>lactuador, cada una <strong>de</strong> las entradas al sistema será:¢ £û i ¡u iminu isi u i ¥ u imin¥ ¥¦si u imin u i u imax(4.27)u imax si u i u imaxSi alguna <strong>de</strong> las salidas <strong>de</strong>l controlador <strong>de</strong>sarrollado (4.17) se saturase, el error <strong>de</strong> seguimientoỹ i no podría ser cero. Esto haría que la integral <strong>de</strong>l controlador (4.17) acumulase elerror, haciendo que la salida <strong>de</strong>l controlador aumentase aún más. La saturación no <strong>de</strong>sapareceríahasta que el error <strong>de</strong> seguimiento ỹ i se volviese negativo y permaneciese enesta situación durante un periodo <strong>de</strong> tiempo suficientemente largo para conseguir que elvalor <strong>de</strong> la integral disminuyese. El resultado <strong>de</strong> este fenómeno, cuando se produce enun regulador PID lineal <strong>de</strong> una entrada y una salida (SISO), es una <strong>de</strong>gradación en lasprestaciones <strong>de</strong>l controlador, que se manifiesta como un gran sobrepaso inicial, seguido<strong>de</strong> una oscilación amortiguada, aunque en algunos casos este fenómeno pue<strong>de</strong> dar lugara la inestabilidad <strong>de</strong>l sistema (Åström y Hägglund, 1995).En un sistema con varias entradas y varias salidas (MIMO), la saturación <strong>de</strong> unacomponente <strong>de</strong>l vector <strong>de</strong> entradas pue<strong>de</strong> obligar a saturar en la misma medida las <strong>de</strong>máscomponentes <strong>de</strong>l vector <strong>de</strong> forma que se disminuya su módulo sin alterar su ángulo. 1 Eneste caso la saturación se manifiesta como un acoplamiento entre los lazos <strong>de</strong> control,que pue<strong>de</strong> <strong>de</strong>gradar en gran medida el comportamiento <strong>de</strong>l sistema.Por tanto es necesario incluir en el controlador un sistema para manejar eficientementela saturación <strong>de</strong>l actuador, evitando que el valor <strong>de</strong> la integral aumente <strong>de</strong>masiadocuando se produzca una saturación (anti-windup). En la literatura se proponen distintosmétodos para evitar el aumento <strong>de</strong> la integral (Åström y Hägglund, 1995) aunque todos sepue<strong>de</strong>n reducir a una misma estructura generalizada, tal como se <strong>de</strong>muestra en (Kothareet al., 1994). El más simple <strong>de</strong> todos los métodos es la integración condicional, que consistesimplemente en <strong>de</strong>jar <strong>de</strong> integrar cuando se <strong>de</strong>tecta una saturación en el actuador.La principal ventaja, aparte <strong>de</strong> la simplicidad <strong>de</strong> implementación, es que no se aña<strong>de</strong>ninguna dinámica adicional al sistema, por lo que no pue<strong>de</strong> dar lugar a inestabilida<strong>de</strong>s.Sin embargo en sistemas MIMO este procedimiento no evita el acoplamiento entre loslazos <strong>de</strong> control, ya que en los periodos <strong>de</strong> saturación la diferencia entre la salida i<strong>de</strong>al<strong>de</strong>l actuador y la salida real pue<strong>de</strong> ser muy elevada, lo que hace que la reducción <strong>de</strong>lmódulo <strong>de</strong>l vector <strong>de</strong> salidas (y por tanto <strong>de</strong> todas sus componentes) sea significativa,produciéndose un acoplamiento entre los distintos lazos <strong>de</strong> control.Para evitar que la diferencia entre la salida <strong>de</strong>l controlador y la <strong>de</strong>l actuador sea elevadase ha usado en este trabajo un método basado en el <strong>de</strong>nominado back-calculation andtracking (Åström y Hägglund, 1995), conocido también como anti-reset windup (Campoy Morari, 1990). Estos métodos consisten en añadir a la integral <strong>de</strong>l regulador PID linealun término adicional que realimenta la diferencia entre la salida i<strong>de</strong>al <strong>de</strong>l actuador u i y1 Este es el caso en la saturación <strong>de</strong> la tensión <strong>de</strong> salida <strong>de</strong>l inversor en un controlador orientado al campo,en el que es necesario limitar el módulo <strong>de</strong>l vector espacial <strong>de</strong> tensión, pero sin variar su ángulo para no per<strong>de</strong>rla orientación al campo.
¡ E¡ x¢¡ 1¤ u¡¡¡¡¡¢¦¤¤¤¤56 <strong>Control</strong> Lyapunov-Integralsu salida real teniendo en cuenta la saturación û i . En el controlador <strong>de</strong>sarrollado en estetrabajo se ha añadido un término similar al propuesto en (Åström y Hägglund, 1995) a laintegral <strong>de</strong>l controlador (4.17), transformándose éste en:¡¢¡¢k 1 ỹ 1k m ỹ mI 1¡I m¤ỹ 1¢ỹ m¢k aw1 u 1¡ û ¡ 1 ¢£¢ dt¡£¥¤¢¡ I 1 ỹ 1¡ L f h 1 dt y x¢ 1r ¡ .k awm ¡ u m¡ û m ¢£¢ dt¡¢¡dI m ỹ m¡ L f h m ¡ x¢ dty mrd(4.28)Como se pue<strong>de</strong> apreciar cuando el actuador no está saturado, el controlador se reduce alpropuesto en (4.17). Sin embargo cuando se produce la saturación <strong>de</strong>l actuador, el sistemaevolucionará en lazo abierto y los términos <strong>de</strong> las integrales vendrán dados por:ỹ i¢k awi ¡ u i¡ û i ¢ (4.29)Por tanto cuando se alcance el régimen permanente se cumplirá que:u i ¡ û i¡ỹ ik awi(4.30)Eligiendo un valor elevado para las ganancias <strong>de</strong> anti-windup k awi , la diferencia entre lasalida <strong>de</strong>l controlador u i y la salida <strong>de</strong>l actuador û i será pequeña, con lo que en el caso<strong>de</strong> tener un actuador vectorial la saturación <strong>de</strong> una componente <strong>de</strong>l vector no influiráapreciablemente en las <strong>de</strong>más componentes, al no ser necesario reducir en gran medidael módulo <strong>de</strong>l vector <strong>de</strong> entrada al actuador.4.3. <strong>Control</strong> Lyapunov-Integral <strong>de</strong> la máquina <strong>de</strong> inducciónen ejes <strong>de</strong> flujo <strong>de</strong> rotorEn el capítulo 3 se ha mostrado que la aplicación <strong>de</strong> los controladores en ejes <strong>de</strong> flujorotor es ventajosa con respecto a su implantación en ejes <strong>de</strong> estator, ya que en ejes <strong>de</strong> flujo<strong>de</strong> rotor las variables <strong>de</strong> estado varían lentamente, lo que impone una menor exigencia <strong>de</strong>velocidad a los controladores. Por tanto en esta sección sólo se va a discutir la aplicación<strong>de</strong>l controlador Lyapunov-Integral en ejes <strong>de</strong> flujo <strong>de</strong> rotor.4.3.1. Mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes <strong>de</strong> rotorUn mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción expresado en ejes <strong>de</strong> flujo <strong>de</strong> rotor y tomandolas corrientes <strong>de</strong> estator, el flujo <strong>de</strong> rotor y la velocidad mecánica (expresada en radianes
¡¢¡¢¦¡¢¦¢¡¢¦4.3 <strong>Control</strong> Lyapunov-Integral <strong>de</strong> la máquina <strong>de</strong> inducción en ejes. . . 57eléctricos por segundo) como variables <strong>de</strong> estado se muestra en el apéndice A:A¤ ¡£¢x¤ ¡£¢B¤ ¡£¢ddti r Sdi r Sqψ r Rd£¥¤¦ ¡ψ r Rq ¡ 0dω Rdt¡A ω S B¡ ¡ ω S A Cω RD 0 E£¥¤i r Sdi r Sqψ r Rd£¥¤F 00 F0 0£¥¤u¦u r Sdu r (4.31)¡¥¢ ¤Sq§¡ e¡ ¢¡P2J m m l (4.32)m e Gψ r Rd ir Sq (4.33)En don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes y viene dada por:ω S ¡ ω R¢4.3.2. Ecuaciones <strong>de</strong>l controladorDi r Sqψ r Rd(4.34)Se <strong>de</strong>finen como salidas <strong>de</strong>l sistema el flujo en eje d (que coincidirá con su módulo)y la velocidad <strong>de</strong> giro <strong>de</strong>l rotor:y 1 ¡ ψ r Rdy 2 ¡ ω RSi se consi<strong>de</strong>ran como entradas al sistema las tensiones <strong>de</strong> estator uS r , se pue<strong>de</strong> <strong>de</strong>mostrarque el grado relativo <strong>de</strong> las salidas y con respecto a dichas entradas es mayor que uno,con lo que no se pue<strong>de</strong> aplicar el controlador Lyapunov-Integral <strong>de</strong>sarrollado en la sección4.2. Sin embargo si se usa un inversor fuente <strong>de</strong> corriente (o un inversor fuente <strong>de</strong>tensión controlado por corriente), las entradas al sistema serán ahora las corrientes <strong>de</strong> estatoriS r , resultando en un grado relativo <strong>de</strong> las salidas y con respecto a las nuevas entradas<strong>de</strong> uno. Las <strong>de</strong>rivadas <strong>de</strong> Lie en este caso son:La matriz E¡ x¢ vendrá dada por:L f h 1 ¡ x¢ ¡ Eψ r Rd (4.35)L g1 h 1 ¡ x¢ ¡ D (4.36)L g2 h 1 ¡ x¢ ¡ 0 (4.37)¡ x¢ ¡ ¡¡ x¢ ¡PL f h 22J m l (4.38)L g1 h 2 0 (4.39)L g2 h 2 ¡ x¢ ¡P2J Gψr Rd (4.40)Y las ecuaciones <strong>de</strong>l controlador, teniendo en cuenta (4.17):x¢¦D 0P0E¡ ¡2JGψ r (4.41)Rd§¦i r Sdi r Sq§¡¦1D02J0PGψ r ¤¦¡Rd§k 1 ¡ ỹ 1¢¡ k 2 ¡ ỹ 2¢I 1ỹ 1 dt¢ ¡ I 1 ỹ 1¡ Eψ r Rd¢ ddt ψr RdrI 2 ỹ 2 dt¢ ¡ I 2 ỹ 2¢ P2Jm l¢ ddtω Rr§(4.42)
58 <strong>Control</strong> Lyapunov-IntegralNótese que la aplicación <strong>de</strong>l controlador (4.42) requiere el conocimiento <strong>de</strong> las variables<strong>de</strong> estado <strong>de</strong> la máquina así como algunos <strong>de</strong> sus parámetros y las perturbacionesa las que está sometido el accionamiento. De las variables <strong>de</strong> estado <strong>de</strong> la máquina, lascorrientes <strong>de</strong> estator pue<strong>de</strong>n medirse, pero el flujo <strong>de</strong> rotor ha <strong>de</strong> ser estimado, tal comose muestra en el Capítulo 6. En cuanto a los parámetros <strong>de</strong> la máquina merece especialatención la resistencia <strong>de</strong> rotor, cuyo valor pue<strong>de</strong> variar durante la operación <strong>de</strong>l accionamiento.En la literatura existen una gran cantidad <strong>de</strong> trabajos acerca <strong>de</strong> la estimación<strong>de</strong>l valor <strong>de</strong> la resistencia, aunque según algunos autores (Tzou, 1996), su estimación noes necesaria en motores <strong>de</strong> pequeña potencia (en el rango <strong>de</strong> un C.V.). En este trabajo laresistencia <strong>de</strong> rotor se estimará on-line, según se <strong>de</strong>scribe en la Sección 6.3.4.3.3. Efecto <strong>de</strong> las perturbaciones <strong>de</strong> la carga sobre el controladorComo se pue<strong>de</strong> apreciar en la ecuación <strong>de</strong>l controlador (4.42), es necesario conocerel valor <strong>de</strong> la inercia <strong>de</strong>l accionamiento y el par <strong>de</strong> carga. El valor <strong>de</strong> la inercia no esnecesario conocerlo con gran precisión salvo que sea necesario garantizar la respuestadinámica <strong>de</strong>l accionamiento, ya que un error en el valor <strong>de</strong> la inercia sólo modifica ladinámica <strong>de</strong>l error <strong>de</strong> seguimiento <strong>de</strong> la velocidad, pero no afecta a la estabilidad <strong>de</strong>lsistema.Si se supone que la inercia <strong>de</strong>l mo<strong>de</strong>lo usado para diseñar el controlador es J mod y sesustituye la ecuación <strong>de</strong>l controlador <strong>de</strong> i r Sq(4.42) en el mo<strong>de</strong>lo <strong>de</strong> la máquina (4.32) y(4.33), se obtiene la ecuación dinámica <strong>de</strong>l error <strong>de</strong> seguimiento <strong>de</strong> la velocidad:J d 2J mod dt 2 ỹ2¢k ¡ 2 ¢I 2 ¢ddt ỹ2 ¢ k 2 I 2 ỹ 2 ¡ 0 (4.43)que es una ecuación diferencial lineal <strong>de</strong> segundo or<strong>de</strong>n cuya solución viene dada por:ỹ i ¡ c 1 e P 1t ¢c 2 e P 2t(4.44)don<strong>de</strong>:P 1 ¡¡ a¡ k 2¢I 2 ¢ ¢¡a 2 ¡ k 2¢2I 2 ¢ 2¡ 4ak 2 I 2(4.45)P 2 ¡¡ a¡ k 2¢I 2 ¢ ¡ a 2 ¡ k 2¢2I 2 ¢ 2¡ 4ak 2 I 2(4.46)siendo ¡Ja modJ. Como se pue<strong>de</strong> apreciar, la parte real <strong>de</strong> P 1 y P 2 es menor que cero paratodos los valores posibles 2 <strong>de</strong> a, siempre y cuando k 2 e I 2 se elijan mayores que cero.Por tanto, la estabilidad <strong>de</strong>l sistema en presencia <strong>de</strong> errores en el mo<strong>de</strong>lado <strong>de</strong> la inerciaestá garantizada.Se pue<strong>de</strong> <strong>de</strong>mostrar que si en t ¡ 0 tanto las salidas <strong>de</strong>l sistema como las integrales<strong>de</strong> los errores <strong>de</strong> seguimiento valen cero y en dicho instante se somete al sistema a unescalón en la referencia <strong>de</strong> velocidad, las constantes <strong>de</strong> integración c 1 y c 2 vienen dadaspor:c 1 ¡ ¡ c 2P 1P 2c 2 ¡ ¡ ω RrP 2P 2¡ P 1(4.47)2 a será siempre mayor que cero salvo que se elija J mod 0.
¢4.4 Resultados <strong>de</strong> simulación 59Par <strong>de</strong> cargaEl par <strong>de</strong> carga (m l ) se pue<strong>de</strong> consi<strong>de</strong>rar como una perturbación <strong>de</strong>l sistema y, talcomo se muestra a continuación, pue<strong>de</strong> ser ignorado (i.e. m l ¡ 0). En esta situación seproducirá un error en el mo<strong>de</strong>lado <strong>de</strong> L f h 2 ¡ x¢ <strong>de</strong> forma que:∆L f h 2 ¡ x¢ ¡P2J m l (4.48)La estabilidad <strong>de</strong>l controlador en esta situación ha sido brevemente discutida en la Sección4.2.2. Pue<strong>de</strong>n analizarse dos situaciones muy comunes en la práctica:Par <strong>de</strong> carga constante: en este caso, la <strong>de</strong>rivada <strong>de</strong> ∆L f h 2 ¡ x¢ valdrá cero y entonces,tal como se ha <strong>de</strong>mostrado en la sección 4.2.2, el sistema será estable.Par <strong>de</strong> carga proporcional a la velocidad: En este caso el par <strong>de</strong> carga vendrádado por:m l ¡ B 1 ω R (4.49)En don<strong>de</strong> B 1 es el coeficiente <strong>de</strong> rozamiento viscoso <strong>de</strong>l accionamiento. La <strong>de</strong>rivada<strong>de</strong> ∆L f h 2 ¡ x¢ será:ddt ∆L fh 2 ¡P2J B d1dt ω R (4.50)¡ x¢Por tanto, la función <strong>de</strong> Lyapunov mostrada en (4.22) no pue<strong>de</strong> garantizar la estabilidad<strong>de</strong>l sistema en esta situación. Sin embargo, la dinámica <strong>de</strong>l error <strong>de</strong> velocida<strong>de</strong>n este caso se pue<strong>de</strong> expresar, teniendo en cuenta (4.20), (4.48) y (4.49),como:ddt ỹ2 ¡ ¡ k 2 ỹ 2¢I 2ỹ 2 dt¡ ¡ I 2 ỹ 2¡P2J B 1 ¡ ỹ 2¢ω Rr ¢ (4.51)Si la velocidad <strong>de</strong> referencia ω Rr es constante, esta ecuación se pue<strong>de</strong> transformaren:d 2dt 2 ỹ2¢ P ¢k 2 I 22J B ddt ỹ2 k 2 I 2 ỹ 2 0 (4.52)¢ ¢ ¡ 1¡que es una ecuación diferencial lineal <strong>de</strong> segundo or<strong>de</strong>n. Las soluciones <strong>de</strong> supolinomio característico son:p ¡¡¨k 2¢I 2¢ P2JB 1©¡k 2¡2I 2 PB 1¡ 2 ¢ 2J ¢ ¢2¢2¡ k 2¢I 2 ¢PB 12J(4.53)De don<strong>de</strong> se <strong>de</strong>duce que ỹ 2 ¡ 0 es un punto <strong>de</strong> equilibrio estable <strong>de</strong> (4.52) siempreque k 2 e I 2 se elijan mayores que cero.¢ PNótese también que si k 2 I 2£ 2J B 1 la respuesta dinámica <strong>de</strong>l sistema será aproximadamenteigual a la que tendría el sistema si se conociese exactamente el par <strong>de</strong>carga. 34.4. Resultados <strong>de</strong> simulaciónPara evaluar las prestaciones <strong>de</strong>l controlador se presentan a continuación una serie<strong>de</strong> simulaciones realizadas con el <strong>de</strong>l motor <strong>de</strong> 250 W cuyos parámetros se muestran en3 Compárese para ello la ecuación (4.52) con (4.43) cuando J mod J
î Sd ¡î Sq ¡60 <strong>Control</strong> Lyapunov-Integralel Apéndice B. En primer lugar se muestra una simulación en tiempo continuo usandoun inversor fuente <strong>de</strong> corriente con saturación en la salida, con el objetivo <strong>de</strong> mostrar lasprestaciones <strong>de</strong>l esquema anti-windup <strong>de</strong>sarrollado en la Sección 4.2.3.En segundo lugar, con el objetivo <strong>de</strong> comparar las prestaciones <strong>de</strong>l controlador propuestoen este capítulo con el controlador <strong>de</strong> Lyapunov presentado en el capítulo 3, semuestran los resultados <strong>de</strong> simulación <strong>de</strong>l sistema cuando el controlador se implementaen tiempo discreto usando un inversor fuente <strong>de</strong> tensión controlado por corriente. Elcontrolador <strong>de</strong> corriente <strong>de</strong>l inversor es el mismo que se ha usado para el controlador <strong>de</strong>Lyapunov (sección 3.4.1) y la implantación es idéntica a la realizada para el controlador<strong>de</strong> Lyapunov, la cual se ha mostrado en la sección 3.4.2.Por último se evalúa la respuesta dinámica <strong>de</strong>l sistema cuando se somete a un escalón<strong>de</strong> pequeña señal 4 en la referencia <strong>de</strong> la velocidad. Se comparan las respuestas obtenidasen simulación con respecto a las predichas teóricamente en la Sección 4.3.3.4.4.1. Simulación en tiempo continuo con inversor fuente <strong>de</strong> corrienteEn la figura 4.1 se muestra la evolución <strong>de</strong> las salidas <strong>de</strong>l sistema cuando se usa elcontrolador propuesto en (4.17) incluyendo la compensación propuesta en (4.28) paraevitar el incremento <strong>de</strong> las integrales cuando se produce una saturación en el actuador.La salida <strong>de</strong>l inversor se ha limitado según la ecuación:£¤i Sdi Si Sd si i S¡i Smax(4.54)¤ i Smax si i S ¦ i Smax£¤i Sqi Si Sq si i S¡i Smax(4.55)¤ i Smax si i S ¦ i SmaxSiendo el valor <strong>de</strong> i Smax <strong>de</strong> 2 A. Como se pue<strong>de</strong> apreciar, cuando se produzca unasaturación se reducirá el módulo <strong>de</strong>l vector hasta su valor máximo, pero dado que sereducen en la misma proporción las dos componentes <strong>de</strong>l vector, no se modificará suángulo.Las ganancias <strong>de</strong>l controlador elegidas son: k 1 ¡ 500, I 1 ¡ 4, k 2 ¡ 100 e I 2 ¡ 40 y lasganancias <strong>de</strong> anti-windup se han elegido k aw1 ¡ 0¢ 05 y k aw2 ¡ 500.Como se pue<strong>de</strong> apreciar en la figura 4.1, el comportamiento <strong>de</strong>l controlador bajosaturación es satisfactorio. Durante el transitorio <strong>de</strong> velocidad se produce una saturaciónen el bucle <strong>de</strong> velocidad que no perturba <strong>de</strong> manera apreciable el control <strong>de</strong> flujo. Sinembargo la saturación ocasionada por el incremento <strong>de</strong>l módulo <strong>de</strong>l flujo en t ¡ 15 s siprovoca una caída <strong>de</strong> la velocidad <strong>de</strong>bido a que la saturación <strong>de</strong> la corriente en el eje <strong>de</strong>flujo provoca una disminución <strong>de</strong> la corriente <strong>de</strong> par, que hace que baje la velocidad <strong>de</strong>la máquina al no po<strong>de</strong>r dar el par necesario.4 Para evitar que se produzca saturación en las salidas.
4.4 Resultados <strong>de</strong> simulación 61ψ R2532.521.510.50051015203002001000-100-200-3000510ω R152025Figura 4.1: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -) con anti-windup. Eje x enseg. Eje y en W b y en rad el s.4.4.2. Simulación en tiempo discreto con inversor fuente <strong>de</strong> tensióncontrolado por corrienteCon el objeto <strong>de</strong> comparar las prestaciones <strong>de</strong>l controlador Lyapunov-Integral conrespecto al controlador <strong>de</strong> Lyapunov presentado en el capítulo 3, se ha realizado una simulaciónusando un accionamiento <strong>de</strong> baja inercia con el motor <strong>de</strong> 250 W (apéndice B).Los controladores se han implantado sin tener en cuenta la saturación <strong>de</strong>l actuador paraevitar que las saturaciones en los transitorios enmascaren las prestaciones <strong>de</strong>l controladory <strong>de</strong>svirtúen la comparación con el controlador <strong>de</strong> Lyapunov. En el capítulo 8 semostrarán los resultados obtenidos cuando se tiene en cuenta la saturación en el inversor.Las ganancias <strong>de</strong> los controladores Lyapunov-Integral se han elegido: k 1 ¡ 250, I 1 ¡ 4,k 2 ¡ 50 e I 2 ¡ 8. Los controladores <strong>de</strong> corriente se han diseñado mediante asignación <strong>de</strong>polos <strong>de</strong> forma que su respuesta en lazo cerrado sea la <strong>de</strong> un sistema <strong>de</strong> segundo or<strong>de</strong>ncon una pulsación natural no amortiguada <strong>de</strong> 250rad£ s y 1£ 2 <strong>de</strong> amortiguamiento. Todoslos controladores se han implantado en tiempo discreto con un periodo <strong>de</strong> muestreo 5<strong>de</strong> T s ¡ 1msLa evolución <strong>de</strong> las salidas <strong>de</strong>l accionamiento con el controlador Lyapunov-Integralse muestra en la Figura 4.2 y en el <strong>de</strong>talle <strong>de</strong> la figura 4.3. Des<strong>de</strong> t ¡ 0 s hasta t ¡ 0¢ 5 sse aumenta el flujo <strong>de</strong> rotor hasta su valor nominal (1,1 Wb) mientras se mantiene lavelocidad a cero para evitar problemas <strong>de</strong> arranque en los controladores. Des<strong>de</strong> t ¡ 0¢ 7 shasta t ¡ 1¢ 4 s el motor se acelera hasta su velocidad nominal. A continuación se realizan5 Según se ha comentado en la sección 3.3.2, los valores razonables <strong>de</strong> la relación entre las constantes <strong>de</strong>tiempo en lazo cerrado y el periodo <strong>de</strong> muestreo sugeridas en la literatura varían entre un mínimo admisible <strong>de</strong>3 y un máximo <strong>de</strong> 10 (Pagola, 1994). En este trabajo, dado que la complejidad <strong>de</strong>l controlador es notable y quelos inversores <strong>de</strong> potencia no pue<strong>de</strong>n trabajar a elevadas frecuencias, se ha consi<strong>de</strong>rado conveniente trabajar conperiodos <strong>de</strong> muestreo gran<strong>de</strong>s. Por ello se elegido un valor <strong>de</strong> 4 para la relación entre la constante <strong>de</strong> tiempo enlazo cerrado más baja y el periodo <strong>de</strong> muestreo.
62 <strong>Control</strong> Lyapunov-Integralψ r Rd (–) y ψr Rdr (- -) 251.210.80.60.40.20051015ω R (–) y ω Rr (- -)204002000-200-4000510152025Figura 4.2: Evolución <strong>de</strong> las salidas. Eje x en seg. Eje y en Wb y rad el s.varios cambios <strong>de</strong> sentido <strong>de</strong> giro, seguidos <strong>de</strong> pequeños cambios en la referencia <strong>de</strong> lavelocidad, pudiéndose apreciar en la Figura 4.2 que estos transitorios <strong>de</strong> velocidad noprovocan un efecto apreciable en el control <strong>de</strong>l flujo. A<strong>de</strong>más los errores <strong>de</strong> seguimientoen régimen permanente tanto para el flujo como para la velocidad son iguales a cero.Para evaluar los efectos <strong>de</strong> los cambios <strong>de</strong> los parámetros <strong>de</strong> la carga, ¡ en t 12 s se divi<strong>de</strong>la inercia <strong>de</strong>l accionamiento por 5 y ¡ en t 17 s se hace igual a 5 veces su valornominal. A<strong>de</strong>más, ¡ en t 13 s el par <strong>de</strong> carga se 0¢ incrementa <strong>de</strong>s<strong>de</strong> 001 Nm ¤rad el sω R hasta003 Nm 0¢ ¤rad el sω R , ¡ en t 15 s se 0¢ <strong>de</strong>crementa a 0001 Nm ¤rad el sω R y ¡ en t 19 s se vuelve a0¢ incrementar a 003 Nm ¤rad el sω R . La variación <strong>de</strong> estos parámetros se muestra en la figura4.3, junto con un <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad. Como se pue<strong>de</strong> apreciar,el sistema es muy robusto frente a los cambios en los parámetros <strong>de</strong> la carga, pues losefectos <strong>de</strong> dichos cambios no afectan apreciablemente el comportamiento <strong>de</strong>l sistema.Los únicos efectos apreciables son en primer lugar una mayor perturbación en el flujodurante los transitorios <strong>de</strong> velocidad cuando el accionamiento tiene una inercia baja, talcomo se pue<strong>de</strong> observar comparando en la figura 4.2 la respuesta <strong>de</strong>l sistema en el transitorioproducido ¡ 10¢ en t 5 s con la obtenida ¡ entre t 12 s ¡ y t 17 s. El segundo efecto<strong>de</strong> la variación <strong>de</strong> los parámetros <strong>de</strong> la carga, apreciable también en el <strong>de</strong>talle <strong>de</strong> la figura4.3, es una respuesta transitoria distinta <strong>de</strong> la nominal según los valores reales <strong>de</strong>l par<strong>de</strong> carga y <strong>de</strong> la inercia. Para terminar la simulación, con el fin <strong>de</strong> ilustrar el <strong>de</strong>sacoploexistente entre el control <strong>de</strong> flujo y el <strong>de</strong> velocidad, ¡ en t 22 s el flujo <strong>de</strong> rotor se ha<strong>de</strong>crementado a la mitad <strong>de</strong> su valor nominal, pudiéndose observar que el efecto sobre elcontrol <strong>de</strong> la velocidad es inapreciable.Si se comparan estos resultados con los obtenidos con el controlador <strong>de</strong> Lyapunov(Figura 3.14) se aprecia que la mejora obtenida con el controlador propuesto es sustancial.
4.4 Resultados <strong>de</strong> simulación 63m l (- -) y ¤ J 10 (–)10.50-0.5-110121420222416 18ω R (–) y ω Rr (- -)3203002802601012141618202224Figura 4.3: Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg. Eje yen Wb y rad el s.4.4.3. Respuesta dinámica frente a un escalón en la referencia <strong>de</strong>velocidadSe han realizado una serie <strong>de</strong> simulaciones para verificar la respuesta dinámica <strong>de</strong>lsistema discutida en la Sección 4.3.3. Los resultados obtenidos se han comparado con larespuesta teórica dada por la ecuación (4.44), en la que se incluye el error <strong>de</strong> mo<strong>de</strong>ladoen la inercia <strong>de</strong>l sistema. En todas las simulaciones las ganancias <strong>de</strong> los controladores <strong>de</strong>Lyapunov han sido: k 1 ¡ 500, I 1 ¡ 4, k 2 ¡ 100 e I 2 ¡ 40.En primer lugar se ha realizado una simulación usando un inversor fuente <strong>de</strong> corrientecon un controlador implantado en tiempo discreto con un periodo <strong>de</strong> muestreo T s ¡ 1 ms.Como se pue<strong>de</strong> apreciar en la Figura 4.4.a, la respuesta <strong>de</strong>l sistema prácticamente coinci<strong>de</strong>con la ecuación (4.44), mostrada también en dicha figura. En la Figura 4.4.b semuestra una simulación similar a la anterior, salvo que la inercia <strong>de</strong>l mo<strong>de</strong>lo usado enel controlador es 5 veces mayor que la <strong>de</strong>l accionamiento. Como se pue<strong>de</strong> apreciar larespuesta <strong>de</strong>l sistema es más rápida que en el caso anterior, pero el resultado se sigueaproximando al predicho por la ecuación (4.44). En la Figura 4.4.c se muestra una simulaciónsin error en el mo<strong>de</strong>lado <strong>de</strong> la inercia, pero utilizando el inversor fuente <strong>de</strong> tensióncontrolado por corriente implantado en la Sección 4.4.2. Dicho inversor está implementadocon un periodo <strong>de</strong> muestreo <strong>de</strong> T s ¡ 1 ms y como regulador <strong>de</strong> corriente se ha implantadoun PI con una pulsación natural no amortiguada <strong>de</strong> 250rad£ s y un factor <strong>de</strong>amortiguamiento <strong>de</strong> 1 2. Como se pue<strong>de</strong> observar se produce una oscilación amortiguadaque es <strong>de</strong>bida a la interacción entre el controlador <strong>de</strong> Lyapunov y el controlador <strong>de</strong> corriente,ya que las constantes <strong>de</strong> tiempo <strong>de</strong> ambos controladores no están lo suficientementeseparadas. Si se aumenta la velocidad <strong>de</strong>l regulador <strong>de</strong> corriente, resultando en una pulsaciónnatural no amortiguada <strong>de</strong> 500rad£ s, para lo que es necesario disminuir el periodo
64 <strong>Control</strong> Lyapunov-Integralab4040303020201010000.040.08c0.12000.040.08d0.124040303020201010000.040.080.12000.040.080.12Figura 4.4: Respuesta a un escalón en la referencia <strong>de</strong> velocidad. (–) respuesta real, (- -)respuesta teórica. (a) Accionamiento con un inversor fuente <strong>de</strong> corriente. (b) í<strong>de</strong>m. (a)pero con error en el mo<strong>de</strong>lado <strong>de</strong> la inercia. (c) Accionamiento con un inversor fuente <strong>de</strong>tensión. (d) í<strong>de</strong>m. (c) pero con controlador implantado con T s ¡ 0¢ 5 ms. Eje x en seg. Ejey en rad el s.ψ r Rd (–) y ψr Rdr (- -) 251.210.80.60.40.20040051015ω R (–) y ω Rr (- -)202000-200-4000510152025Figura 4.5: Evolución <strong>de</strong> las salidas. Eje x en seg. Eje y en Wb y rad el s.<strong>de</strong> muestreo hasta T s ¡ 0¢ 5 ms, se obtiene el resultado mostrado en la Figura 4.4.d, en laque se pue<strong>de</strong> apreciar que la respuesta dinámica <strong>de</strong>l sistema se aproxima ahora muchomás a la respuesta teórica.
4.5 Conclusiones 651m l (- -) y J ¤ 10 (–)0.50-0.5-110121416 18ω R (–) y ω Rr (- -)2022243002802601012141618202224Figura 4.6: Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg. Eje yen Wb y rad el s.Conviene <strong>de</strong>stacar que el aumento <strong>de</strong> la velocidad en los controladores <strong>de</strong> corrientejunto con la disminución <strong>de</strong>l periodo <strong>de</strong> muestreo también acarrea un mejor <strong>de</strong>sacoploentre el flujo <strong>de</strong> rotor y la velocidad. En la Figura 4.5 se muestran los resultados <strong>de</strong>una simulación realizada en las mismas condiciones que la mostrada en la Figura 4.2,salvo que el regulador <strong>de</strong> corriente tiene ahora una pulsación natural no amortiguada<strong>de</strong> 500rad£ s y el periodo <strong>de</strong> muestreo es igual a T s ¡ 0¢ 5 ms. Como se pue<strong>de</strong> apreciarambos bucles <strong>de</strong> control están totalmente <strong>de</strong>sacoplados, lo cual se traduce en una mejorrespuesta dinámica, especialmente en la zona <strong>de</strong> t ¡ 12 s a t ¡ 15 s en la que la inercia<strong>de</strong>l accionamiento es baja, tal como se pue<strong>de</strong> apreciar en el <strong>de</strong>talle <strong>de</strong> la Figura 4.6.4.5. ConclusionesEn este capítulo se ha introducido una mejora al controlador <strong>de</strong> Lyapunov discutidoen el Capítulo 3 que permite eliminar los errores <strong>de</strong> seguimiento en régimen permanentecuando se <strong>de</strong>sconocen los parámetros <strong>de</strong> la carga. Esta mejora es una aportación original<strong>de</strong> la tesis y ha consistido, basándose en las i<strong>de</strong>as <strong>de</strong> control lineal, en la introducción <strong>de</strong>la integral <strong>de</strong> los errores <strong>de</strong> seguimiento en la función <strong>de</strong> Lyapunov. Se ha <strong>de</strong>mostradoque el sistema es estable en presencia <strong>de</strong> errores en el mo<strong>de</strong>lado <strong>de</strong>l sistema y se hadiscutido el comportamiento <strong>de</strong>l controlador en presencia <strong>de</strong> saturaciones en el actuador,proponiéndose un mecanismo para evitar que las integrales crezcan <strong>de</strong>masiado en estasituación y provoquen un mal comportamiento <strong>de</strong>l sistema.El controlador propuesto se ha aplicado a un motor <strong>de</strong> inducción y se ha <strong>de</strong>mostradoque dicho controlador es estable en presencia <strong>de</strong> errores en el mo<strong>de</strong>lado <strong>de</strong> la inercia<strong>de</strong>l accionamiento y en presencia <strong>de</strong> perturbaciones en el par <strong>de</strong> carga, analizándose la
66 <strong>Control</strong> Lyapunov-Integralrespuesta dinámica <strong>de</strong>l accionamiento en ambos casos.Por último las prestaciones <strong>de</strong>l controlador se han mostrado mediante simulación,obteniéndose una notable mejora con respecto a los resultados obtenidos con el controlador<strong>de</strong> Lyapunov propuesto en el Capítulo 3. En particular se obtiene error <strong>de</strong> seguimientonulo en régimen permanente, un control <strong>de</strong>sacoplado entre el flujo y la velocidad y unabuena robustez frente a los cambios en los parámetros <strong>de</strong> la carga.
Capítulo 5<strong>Control</strong> vectorial directo5.1. IntroducciónExisten dos soluciones tradicionales para controlar un motor <strong>de</strong> inducción con orientaciónal campo: el control vectorial indirecto y el control vectorial directo. El primero,discutido en el apéndice F, tiene la ventaja <strong>de</strong> ser muy fácil <strong>de</strong> implantar. Sin embargo,el hecho <strong>de</strong> ser un control en bucle abierto hace que sus prestaciones dinámicas no seanóptimas. En cambio, el controlador vectorial directo, aunque más complejo <strong>de</strong> implantarporque necesita una medida <strong>de</strong>l flujo, presenta un buen comportamiento dinámico. Aquíse <strong>de</strong>muestra que dicho comportamiento dinámico es similar al ofrecido por el controladorLyapunov-Integral.El control vectorial directo se basa en el mo<strong>de</strong>lo <strong>de</strong>l motor en ejes <strong>de</strong> flujo <strong>de</strong> rotorpresentado en el apéndice A. A través <strong>de</strong> un cambio <strong>de</strong> variable no lineal, las ecuaciones<strong>de</strong> estado <strong>de</strong> la máquina, que originalmente son no lineales y <strong>de</strong>pendientes <strong>de</strong>l tiempo, setransforman en lineales e in<strong>de</strong>pendientes <strong>de</strong>l tiempo. El sistema lineal resultante se controlautilizando técnicas <strong>de</strong> control lineal clásico (García Cerrada, 1991). Esta técnica esen realidad una linealización entrada-estado, pero realizada <strong>de</strong> una manera ad-hoc, en lugar<strong>de</strong> sistemáticamente como se ha presentado en el capítulo 2. Según se mostrará en estecapítulo, el comportamiento <strong>de</strong>l controlador vectorial directo es totalmente satisfactorio,todo lo contrario al obtenido con el controlador mediante linealización entrada-salida sistemático,el cual fue propuesto con posterioridad. Cabe preguntarse por tanto cuál es ladiferencia entre ambos controladores, pues en principio ambos usan la misma técnica <strong>de</strong>linealización mediante una realimentación no lineal. La diferencia estriba en que en elcontrolador vectorial directo sólo se incluyen en las ecuaciones <strong>de</strong> linealización los términosno lineales y <strong>de</strong>pendientes <strong>de</strong>l tiempo <strong>de</strong> las ecuaciones <strong>de</strong> estado <strong>de</strong> las variableseléctricas <strong>de</strong> la máquina, consi<strong>de</strong>rándose la velocidad mecánica como un parámetro. Dehecho la ecuación <strong>de</strong>l par, según se verá más a<strong>de</strong>lante, es una relación no lineal entre elflujo y la corriente <strong>de</strong> par <strong>de</strong> la máquina, por lo que para realizar un control <strong>de</strong>sacoplado<strong>de</strong>l par y <strong>de</strong>l flujo, es necesario mantener este último constante (Marino et al., 1993).Por el contrario, la linealización exacta sistemática realiza una transformación no lineal<strong>de</strong>l sistema completo reduciéndolo a un sistema lineal en forma normal (Isidori, 1995),es <strong>de</strong>cir, incluye tanto los términos lineales como los no lineales en las ecuaciones <strong>de</strong>transformación, resultando como sistema lineal equivalente una ca<strong>de</strong>na <strong>de</strong> integradores.
¡¢¡¢¦¡¢¦¢¡¢¦68 <strong>Control</strong> vectorial directoEste hecho hace que las ecuaciones <strong>de</strong> la transformación no lineal para linealizar exactamenteel sistema sean mucho más complejas que las utilizadas en el control vectorialdirecto. Esta complejidad hace que si en la implantación en tiempo discreto no se tienenen cuenta los efectos <strong>de</strong>l muestreo en dichas ecuaciones no lineales, el error cometido almantenerlas constantes durante todo el periodo <strong>de</strong> muestreo es mucho mayor en el caso<strong>de</strong> la linealización sistemática que en la ad-hoc <strong>de</strong>l controlador vectorial, dando lugar aun peor comportamiento <strong>de</strong>l sistema.En este capítulo, aparte <strong>de</strong> repasar la estrategia <strong>de</strong> diseño <strong>de</strong>l control vectorial directo,se preten<strong>de</strong> comparar sus prestaciones con las <strong>de</strong>l controlador Lyapunov-Integralpresentado en el capítulo 4. En la sección 5.2 se muestra el diseño <strong>de</strong>l controlador. Parapo<strong>de</strong>r comparar sus prestaciones con las <strong>de</strong>l controlador Lyapunov-Integral, el controladorvectorial directo se ha implantado usando un inversor fuente <strong>de</strong> tensión controladoen corriente. En la sección 5.3 se muestran los resultados <strong>de</strong> simulación <strong>de</strong>l controladorpropuesto. Con el fin <strong>de</strong> compararlo con el controlador Lyapunov-Integral, tanto las constantes<strong>de</strong> tiempo <strong>de</strong>l controlador como los transitorios <strong>de</strong> las referencias se han elegidoiguales a los usados en la simulación <strong>de</strong>l controlador Lyapunov-Integral. Por último, enla sección 5.4 se muestran las similitu<strong>de</strong>s y las diferencias entre el controlador vectorialdirecto y el Lyapunov-Integral.5.2. Diseño <strong>de</strong>l controladorSi se observa el mo<strong>de</strong>lo <strong>de</strong>l motor en ejes d-q <strong>de</strong> flujo <strong>de</strong> rotor <strong>de</strong>sarrollado en lasección A.2.3:A¤ ¡¥¢x¤ ¡¥¢B¤ ¡¥¢ddti r Sdi r Sqψ r Rdd£ ¤¦ ¡ψ r Rq ¡ 0dt ω R ¡A ω S B¡ ¡ ω S A Cω RD 0 E£ ¤i r Sdi r Sqψ r Rd£ ¤F 00 F0 0£ ¤u¦u r Sdu r (5.1)¡£¢ ¤Sq§¡ e¡ ¢¡P2J m m l (5.2)m e Gψ r Rd ir Sq (5.3)se pue<strong>de</strong> apreciar que existe un acoplamiento entre la corriente en eje q y el flujo <strong>de</strong> rotor.A<strong>de</strong>más el mo<strong>de</strong>lo <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la velocidad <strong>de</strong>l rotor y <strong>de</strong> ω S , por lo que no es invarianteen el tiempo.Si se <strong>de</strong>fine el siguiente cambio <strong>de</strong> variable no lineal en las entradas (García Cerrada,1991):v r Sd ¡ u r Sd¢ ω SF ir Sq (5.4)v r Sq ¡ u r Sq¡ω SF ir Sd¡Cω RF ψr Rd (5.5)
¡¢¡¢¦¡¢¦¢¡¢¦5.2 Diseño <strong>de</strong>l controlador 69el mo<strong>de</strong>lo <strong>de</strong>l motor se convierte en:A¤ ¡¥¢x¤ ¡£¢B¤ ¡£¢ddti r Sdi r Sqψ r Rdd£¥¤¦ ¡ψ r Rq ¡ 0dt ω R ¡A 0 B0 A 0D 0 E£¥¤i r Sdi r Sqψ r Rd£¥¤F 00 F0 0£¥¤v¦v r Sdv r (5.6)¡£¢ ¤Sq§¡ e¡ ¢¡P2J m m l (5.7)m e Gψ r Rd ir Sq (5.8)en don<strong>de</strong> se pue<strong>de</strong> apreciar que el sistema (5.6) es un sistema lineal e invariante en eltiempo y que a<strong>de</strong>más la ecuación <strong>de</strong> la corriente i r Sq está <strong>de</strong>sacoplada <strong>de</strong>l flujo ψr Rd y <strong>de</strong>la corriente i r Sd .1 Por tanto se pue<strong>de</strong>n aplicar técnicas <strong>de</strong> control lineal para diseñar loscontroladores que gobiernen a cada uno <strong>de</strong> los subsistemas por separado. No obstante,conviene <strong>de</strong>stacar que la ecuación <strong>de</strong> par (5.8) no es lineal, dando lugar a un acoplamientoentre el flujo <strong>de</strong> rotor y la corriente <strong>de</strong> par i r Sq. Por tanto, sólo pue<strong>de</strong> conseguirse un control<strong>de</strong>sacoplado entre flujo y par (o flujo y velocidad) si se mantiene constante el flujo <strong>de</strong>rotor (Marino et al., 1993).5.2.1. Diseño <strong>de</strong>l control <strong>de</strong> flujoLa dinámica <strong>de</strong>l flujo y la corriente en eje d vienen dadas por:ddt¦i r Sdψ r Rd§¡¦AD E§B¦i r Sdψ r Rd§¢¦F0§v r Sd (5.9)Una alternativa <strong>de</strong> diseño que permite comparar este controlador con el Lyapunov-Integral consiste en diseñar un controlador para el flujo, cuya salida será la referencia <strong>de</strong>la corriente i r Sdr, y un controlador para la corriente. La ecuación <strong>de</strong> flujo se reduce portanto a:ddt ψr ¡ Rd Eψ r ¢Rd Di r Sdr(5.10)Si se aña<strong>de</strong> una integración al controlador anterior para evitar errores en régimenpermanente, el sistema resultante es:ddt¦ψ r Rdψ r Rd§¡¦E 01 0§¦ψ r Rdψ r Rd§¢¦D0§i r Sdr(5.11)y la ecuación <strong>de</strong>l controlador será:i r Sdr ¡ K Iψ ¡ ψ r Rdr¡ ψ r Rd¢ dt ¢ K Pψ ¡ ψ r Rdr¡ ψ r Rd¢ (5.12)Siendo posible diseñar las ganancias K Iψ y K Pψ mediante asignación <strong>de</strong> polos, previaconversión <strong>de</strong>l sistema (5.11) a tiempo discreto. De nuevo, en este trabajo se ha usadopara ello la función place <strong>de</strong>sarrollada por el autor para la toolbox <strong>de</strong> control <strong>de</strong> Octave.1 Por esta razón a las ecuaciones (5.4) y (5.5) se les <strong>de</strong>nomina ecuaciones <strong>de</strong> <strong>de</strong>sacoplo.
¢70 <strong>Control</strong> vectorial directoDiseño <strong>de</strong>l controlador <strong>de</strong> corriente en eje dLa ecuación <strong>de</strong> la corriente i r Sdse pue<strong>de</strong> expresar:ddt ir ¡ Sd Ai r ¢SdSi se realiza el cambio <strong>de</strong> variable:Fv r SdBψ r Rd (5.13)t r Sd ¡ v r Sdla ecuación <strong>de</strong> la corriente en eje d se reduce a:¢ BF ψr Rd (5.14)ddt ir ¡ Sd Ai r ¢SdFt r Sd (5.15)Al igual que con el controlador <strong>de</strong> flujo, se pue<strong>de</strong> añadir una integración al controladoranterior para evitar errores en régimen permanente, con lo que el sistema seconvierte en:ddty la ecuación <strong>de</strong>l controlador será:¦i r Sdi r Sd§¡¦A 01 0§¦i r Sdi r Sd§¢¦F0§t r Sd (5.16)t r Sd ¡ K I¨i r Sdr¡ i r Sd©dt ¢ K P¨i r Sdr¡ i r Sd© (5.17)Siendo posible diseñar las ganancias K I y K P mediante asignación <strong>de</strong> polos al igual quecon el controlador <strong>de</strong> flujo.5.2.2. Diseño <strong>de</strong>l controlador <strong>de</strong> velocidadEl controlador <strong>de</strong> velocidad se implanta <strong>de</strong> la misma manera que el controlador <strong>de</strong>flujo, es <strong>de</strong>cir, un regulador PI genera la referencia para el regulador <strong>de</strong> la corriente eneje q.A partir <strong>de</strong> la ecuación (5.7) se pue<strong>de</strong> <strong>de</strong>ducir un mo<strong>de</strong>lo en variables <strong>de</strong> estado parala velocidad:ddt ω ¢ PR ω ¡ 0¤ R2J m P2J m l (5.18)e¡en don<strong>de</strong> se consi<strong>de</strong>ra al par motor m e como la entrada al sistema y al par resistente m lcomo una perturbación. Si se amplía el sistema para incluir una integración se obtiene:ddt¦ω Rω¡¦0 01 0§R§¦ω R ¢ω R§¦P2J0§m e¡¦P2J0§m l (5.19)La ecuación <strong>de</strong>l controlador será por tanto:m er ¡ K Iω ¡ ω Rr¡ ω R ¢ dt ¢ K Pω ¡ ω Rr¡ ω R ¢ (5.20)Siendo posible diseñar las ganancias K Iω y K Pω mediante asignación <strong>de</strong> polos.
5.3 Resultados <strong>de</strong> simulación 710¢Cte. dominante Cte. no dominante K P K I<strong>Control</strong> flujo 25 s 0,004 s 9,0539 38,6790<strong>Control</strong> velocidad 0,125 s 0,02 s 0,2827 1,9430Cuadro 5.1: Constantes <strong>de</strong> tiempo en bucle cerrado y ganancias <strong>de</strong>l controlador vectorialDiseño <strong>de</strong>l controlador <strong>de</strong> corriente en eje qLa salida <strong>de</strong>l controlador <strong>de</strong> velocidad es la referencia <strong>de</strong>l par motor que ha <strong>de</strong> generarla máquina. A partir <strong>de</strong> la ecuación (5.8) se pue<strong>de</strong> calcular la referencia <strong>de</strong> corriente eneje q como:m eri r Sq r Gψ r Rd¡La ecuación <strong>de</strong> la corriente en eje q se pue<strong>de</strong> <strong>de</strong>ducir <strong>de</strong> (5.6):ddt ir ¡ Sq Ai r ¢Sq(5.21)Fv r Sq (5.22)Para eliminar el error en régimen permanente se pue<strong>de</strong> añadir una integración, obteniéndoseel sistema:d¦i r Sqdti r ¢¦F0§v r Sq (5.23)Sq§¦i r Sqi r Sq§¡¦A 01 0§Que como se pue<strong>de</strong> observar es idéntico al <strong>de</strong> la corriente en eje d (5.16). Por tanto pue<strong>de</strong>usarse en este caso el mismo controlador:v r Sq K ¡ I i r Sq r¡ i r dt K ¢ Sq¢ P i r Sq r¡ i r (5.24)Sq¢Siendo posible diseñar las ganancias K I y K P mediante asignación <strong>de</strong> polos.5.3. Resultados <strong>de</strong> simulaciónCon el objetivo <strong>de</strong> comparar las prestaciones <strong>de</strong>l controlador vectorial directo propuestoen esta sección con el controlador Lyapunov-Integralmostrado en el capítulo 4 se harealizado una simulación en las mismas condiciones que la realizada en la sección 4.4.2.Las ganancias <strong>de</strong>l controlador vectorial se han calculado mediante asignación <strong>de</strong> polosusando la función place <strong>de</strong> Octave. Estas ganancias, junto con las constantes <strong>de</strong> tiempoen lazo cerrado, se muestran en la tabla 5.1. Nótese que las ganancias se han diseñadopara que el controlador vectorial y el Lyapunov integral tengan las mismas constantes <strong>de</strong>tiempo en lazo cerrado.En la figura 5.1 se muestra el comportamiento <strong>de</strong>l controlador cuando se somete almotor al mismo transitorio que el utilizado para la simulación <strong>de</strong>l controlador Lyapunov-Integral mostrado en la sección 4.4.2. Si se compara con el resultado obtenido para elcontrolador Lyapunov-Integral mostrado en la figura 4.2 se pue<strong>de</strong> apreciar que el comportamientoes el mismo. En la figura 5.2 se muestra un <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong>l sistemasometido a perturbaciones. Como se pue<strong>de</strong> apreciar si se compara con los resultados <strong>de</strong>lcontrolador Lyapunov-Integral mostrados en la figura 4.3, el comportamiento <strong>de</strong> amboscontroladores en esta situación es también prácticamente el mismo.
72 <strong>Control</strong> vectorial directoψ r Rd (- -) y ψr Rdr1.210.80.60.40.20051015ω R (–) y ω Rr (- -)20254002000-200-4000510152025Figura 5.1: Evolución <strong>de</strong> las salidas <strong>de</strong>l sistema. Eje x en seg. Eje y en Wb y rad el s.m l (- -) y J ¤ 10 (–)10.50-0.5-110121416 18ω R (–) y ω Rr (- -)2022243203002802601012141618202224Figura 5.2: Evolución <strong>de</strong> las perturbaciones y <strong>de</strong> la velocidad (<strong>de</strong>talle). Eje x en seg. Eje yen Wb y rad el s.5.4. Comparación con el controlador Lyapunov-IntegralComo se ha mostrado en la sección 5.3, el comportamiento i<strong>de</strong>al <strong>de</strong>l controladorvectorial es prácticamente igual al <strong>de</strong>l Lyapunov-Integral. En esta sección se muestranlas similitu<strong>de</strong>s y las diferencias entre ambos controladores.
5.4 Comparación con el controlador Lyapunov-Integral 735.4.1. <strong>Control</strong>adores <strong>de</strong> corrienteTanto el controlador vectorial como el Lyapunov-Integral se han diseñado usando uninversor fuente <strong>de</strong> tensión controlado en corriente. En ambos casos el sistema a controlartiene la misma representación en espacio <strong>de</strong> estado, tal como se pue<strong>de</strong> apreciar si secompara la ecuación (3.77) con las ecuaciones (5.16) y (5.23). A<strong>de</strong>más en ambos casosse han diseñado las ganancias <strong>de</strong>l controlador PI para que el sistema en lazo cerrado tenga250situados sus polos en 250 22 j.2La salida <strong>de</strong> los controladores <strong>de</strong> corriente es la tensión <strong>de</strong>sacoplada: v r Sd y vr Sq enel controlador Lyapunov-Integral y tSd r y vr Sqen el controlador vectorial. Comparando laecuación (5.5) con (3.74) se pue<strong>de</strong> observar que para el eje q la ecuación <strong>de</strong> <strong>de</strong>sacoplo esla misma en ambos controladores. Si se sustituye (5.4) en (5.14) se obtiene la ecuación<strong>de</strong> <strong>de</strong>sacoplo entre tSd r y ur Sd :t r Sd ¡ u r Sdω ¢ SF ir ¢ BSqF ψr Rd (5.25)que como se pue<strong>de</strong> observar es igual a la ecuación <strong>de</strong> <strong>de</strong>sacoplo utilizada en el controladorLyapunov-Integral (3.73).En consecuencia, tanto en el controlador vectorial como en el controlador Lyapunov-Integral los controladores <strong>de</strong> corriente son idénticos.5.4.2. <strong>Control</strong>adores <strong>de</strong> flujo y <strong>de</strong> velocidadTanto en el controlador vectorial como en el Lyapunov-Integral, los controladores <strong>de</strong>flujo y <strong>de</strong> velocidad proporcionan las referencias <strong>de</strong> corriente en eje d y en eje q respectivamente.3 Si se supone que los controladores <strong>de</strong> corriente son i<strong>de</strong>ales (infinitamemterápidos), se pue<strong>de</strong> <strong>de</strong>spreciar la dinámica <strong>de</strong>l estator en el mo<strong>de</strong>lo <strong>de</strong>l motor (5.1), con loque la dinámica <strong>de</strong>l flujo se reduce a:y la <strong>de</strong> la velocidad a:ddt ψr ¡ Rd Di r ¢Sdddt ω R ¡ 0¤ ω R¢Eψ r Rd (5.26)P2J m P2J m l (5.27)e¡m e Gψ r Rd ir Sq (5.28)¡En el caso <strong>de</strong>l control vectorial, las referencias <strong>de</strong> la corriente se calculan según:i r Sdr ¡ K Iψ ¡ ψ r Rdr¡ ψ r Rd¢ dt ¢ K Pψ ¡ ψ r Rdr¡ ψ r Rd¢ (5.29)i r Sq r ¡1Gψ r RdK Iω ω Rr¡ ¡ ω R dt K ¢ Pω ω ¢ Rr¡ ¡ ω R (5.30) ¢¡En don<strong>de</strong> la última ecuación se ha obtenido sustituyendo (5.20) en (5.21). Como se pue<strong>de</strong>apreciar, dado que la ecuación <strong>de</strong>l flujo <strong>de</strong> rotor es lineal, se aplica un controlador PI paracalcular la referencia <strong>de</strong> la corriente en eje d. Sin embargo, en el control <strong>de</strong> velocidad es2 Configuración <strong>de</strong> Butterworth con una pulsación natural no amortiguada <strong>de</strong> 250rad¢ s.3 En el controlador vectorial la generación <strong>de</strong> la referencia <strong>de</strong> corriente en eje q se realiza mediante unatransformación no lineal (5.21) a partir <strong>de</strong> la referencia <strong>de</strong> par proporcionada por el regulador <strong>de</strong> velocidad.
i r Sd r ¡74 <strong>Control</strong> vectorial directo1necesario realizar una operación adicional (Gψ r ) para eliminar el término no lineal <strong>de</strong>Rdla ecuación <strong>de</strong>l par y linealizar así el sistema. Al sistema lineal resultante se le aplica uncontrolador PI. Las ganancias <strong>de</strong> los reguladores se calculan mediante asignación <strong>de</strong> polos,<strong>de</strong> forma que las respuestas en lazo cerrado <strong>de</strong> los sistemas lineales sean las <strong>de</strong>seadas.Conviene <strong>de</strong>stacar que para calcular estas ganancias se ha obtenido previamente el sistemaequivalente en tiempo discreto <strong>de</strong> las ecuaciones (5.26) y (5.27) y se ha discretizadoel regulador.En el caso <strong>de</strong>l controlador Lyapunov-Integral, tal como se ha mostrado en la sección4.3.2, las referencias <strong>de</strong> la corriente vienen dadas por:i r Sd r ¡i r Sq r ¡1D k 1I 1 ¡ ψ r Rdr¡ ψ r Rd¢ dt ¢ ¡ k 1¢2JPGψ r Rdk 2 I 2 ¡ ω Rr¡ ω R ¢ dt ¢ ¡ k 2¢I 1 ¢ ¡ ψ r Rdr¡ ψ r Rd¢ ¡I 2 ¢ ¡ ω Rr¡ ω R ¢¢P2J m l ¢Eψ r Rd¢ ddt ψr Rdr¡(5.31)ddt ω Rr¡ (5.32)En la aplicación práctica no se han tenido en cuenta ni las <strong>de</strong>rivadas <strong>de</strong> las referencias niel par <strong>de</strong> carga, con lo que las ecuaciones (5.31) y (5.32) se reducen a:1D k 1I 1 ¡ ψ r Rdr¡ ψ r Rd¢ dt ¢ ¡ k 1¢2Jk 2 I 2 ¡ ω Rr¡ ω R ¢ dt ¢ ¡ k 2¢I 1 ¢ ¡ ψ r Rdr¡ ψ r Rd¢ ¡I 2 ¢ ¡ ω Rr¡ ω R ¢¡Eψ r (5.33)Rd¡(5.34)PGψ r Rdi r Sq r¡Como se pue<strong>de</strong> apreciar, cuando se aplica este controlador al sistema se produce unacancelación <strong>de</strong> los términos D y Eψ r Rd en el controlador <strong>de</strong> flujo y PGψr Rd2Jen el controlador<strong>de</strong> velocidad. Es <strong>de</strong>cir, en este controlador, al contrario que en el controlador vectorialdirecto, en don<strong>de</strong> sólo se cancela el término no lineal <strong>de</strong> la ecuación <strong>de</strong>l par; se cancelantodos los términos <strong>de</strong> las ecuaciones <strong>de</strong> la máquina, dando lugar al siguiente sistema enlazo cerrado:d¡ Rdr¡ ¡ ¡ ¡ Rd¢ Rd¢ Rdr¡ dt¡ ¡ Rdr¡ Rd¢ ¡ ¢¢¡ ¡ ¢ ¢ dt¡ ¡ Rr¡¢¡ ¢ ¡ Rr¡ ¡ ¢ Rr¡dt ψr ψ r k 1 I 1 ψ r ψ r k 1 I 1 ψ r ψ r (5.35)ddt ω ω R k 2 I 2 ω ω R k 2 I 2 ω ω R (5.36)que, como se ha mostrado en la sección 4.2, tiene por solución:c 21 e ¡k 1 t¡ Rdr¡ ¡ ¡¢Rd¢¢ ¡ ¢ ¡ Rr¡ ¡ ¡ψ r ψ r c 11 eI 1 tω ω R c 12 eI 2 tc 22 ek 2 t(5.37)(5.38)siendo c 11 , c 21 , c 12 y c 22 cuatro constantes <strong>de</strong> integración. En consecuencia el sistema enlazo cerrado tendrá sus en¡ polos k 1 I y¡ 1 para el control <strong>de</strong> flujo en¡ y k 2 I y¡ 2 parael control <strong>de</strong> velocidad.En la tabla 5.2 se resumen las ecuaciones <strong>de</strong> los dos controladores. Como se pue<strong>de</strong>apreciar, los controladores <strong>de</strong> velocidad serán idénticos si se cumple que:K Iω ¡ k 2 I 22JPK Pω ¡ ¡ k 2¢I 2 ¢2JP(5.39)(5.40)Si el diseño <strong>de</strong> los reguladores PI <strong>de</strong>l controlador vectorial se hubiese realizado a partir<strong>de</strong> las ecuaciones (5.26) y (5.27), en lugar <strong>de</strong> sus equivalentes en tiempo discreto, las
5.4 Comparación con el controlador Lyapunov-Integral 75Vec. i r Sdr ¡ K Iψ<strong>Control</strong> <strong>de</strong> flujo¨ψ r Rdr¡ ψ r Rd©dt ¢ K Pψ¨ψ r Rdr¡ ψ r Rd©Ly.-In. i r ¡1Sd r Dk 1 I 1 ¨ψ r ψ r Rd©dt ¡ kRdr¡¢1 I 1 ¢¨ψr ψ r ¢ ¡<strong>Control</strong> <strong>de</strong> velocidadRdr¡Rd©Vec. i r 1Sq r¡Ly.-In. i r Sq r¡2JPGψ r Rd ¢Gψ r K ¡ Iω ω Rr¡ ω ¡ R dt K ¢ ¢ Pω ω Rr¡ ω ¡ R ¢Rd¢k 2 I 2 ω Rr¡ ¡ ω R dt ¡ k ¢¢2 I 2 ¡ ω ¢ Rr¡ ¢ ω R ¢¤£Eψ r Rd¡Cuadro 5.2: Ecuaciones <strong>de</strong> los controladores vectorial directo y Lyapunov-Integralrelaciones (5.39) y (5.40) se cumplirían, ya que la solución al problema <strong>de</strong> la asignación<strong>de</strong> polos es única en este caso. Sin embargo, <strong>de</strong>bido a que el diseño <strong>de</strong> los reguladoresPI <strong>de</strong>l controlador vectorial se ha realizado a partir <strong>de</strong>l equivalente en tiempo discreto <strong>de</strong>las ecuaciones <strong>de</strong>l sistema, las ganancias obtenidas para la versión discreta <strong>de</strong>l reguladorserán distintas. Por ejemplo, en las simulaciones realizadas los valores <strong>de</strong> k 2 e I 2 han sido50 y 8 respectivamente. Por tanto, para que ambos controladores fuesen idénticos, K Iωtendría que ser igual a 2 y K Pω tendría que ser igual a 0¢ 29. Como se pue<strong>de</strong> comprobaren la tabla 5.1, los valores <strong>de</strong> K Iω y K Pω son 1¢ 9430 y 0¢ 2827 respectivamente. Por tanto,aunque la estructura <strong>de</strong> ambos controladores es la misma, sus ganancias, aunque aproximadamenteiguales, no son idénticas, con lo que los controladores, no evolucionarán <strong>de</strong>la misma manera. El controlador vectorial, <strong>de</strong>bido a que en su diseño se ha tenido encuenta que el sistema se va a implantar en tiempo discreto, se comportará <strong>de</strong> una maneramarginalmente más parecida al diseño original.Por otro lado, según se pue<strong>de</strong> apreciar en la tabla 5.2, los controladores <strong>de</strong> flujo notienen la misma estructura, ya que, aunque se cumplan las relaciones:K Iψ ¡ k 1 I 11DK Pψ ¡ ¡ k 1¢I 1 ¢1D(5.41)(5.42)en el controlador Lyapunov-Integral se produce la cancelación <strong>de</strong>l término Eψ r Rd, que enel controlador vectorial no se produce. A<strong>de</strong>más, al igual que en el controlador <strong>de</strong> velocidad,el hecho <strong>de</strong> diseñar las ganancias <strong>de</strong>l controlador vectorial a partir <strong>de</strong>l equivalenteen tiempo discreto <strong>de</strong> las ecuaciones <strong>de</strong> la máquina hace que las ganancias proporcionale integral sean distintas. Por ejemplo, en las simulaciones realizadas k 1 ¡ 250 y I 1 ¡ 4,con lo que se tendría que cumplir que K Iψ fuese igual a 43,41 y K Pψ fuese igual a 11,03.Aquí las diferencias son claras pues, como se pue<strong>de</strong> apreciar en la tabla 5.1, los valoresque se han usado para K Iψ y K Pψ han sido <strong>de</strong> 38,68 y 9,05 respectivamente.A la vista <strong>de</strong> estos resultados, si se implantasen ambos controladores en tiempo continuosin errores en los parámetros y si se eligen los polos <strong>de</strong>l controlador vectorial <strong>de</strong>forma que coincidiesen con los <strong>de</strong>l controlador Lyapunov-Integral, el comportamiento <strong>de</strong>ambos sistemas será idéntico. Sin embargo en la aplicación en tiempo discreto o cuandoexisten errores en los parámetros o en el flujo <strong>de</strong> rotor, la cancelación <strong>de</strong>l término Eψ r Rdy el hecho <strong>de</strong> no tener en cuenta que el sistema se va a implantar en tiempo discreto en elcontrolador Lyapunov-Integral (5.31-5.32) pue<strong>de</strong> provocar una <strong>de</strong>gradación en las prestaciones<strong>de</strong>l sistema o incluso hacerlo inestable. De hecho, si en las simulaciones realizadasen las secciones 4.4.2 y 5.3 se divi<strong>de</strong> la inercia <strong>de</strong>l accionamiento en t ¡ 12 s por 10 en
76 <strong>Control</strong> vectorial directolugar <strong>de</strong> por 5; el controlador Lyapunov-Integral presenta un comportamiento inestable,mientras que el vectorial directo es capaz <strong>de</strong> afrontar con éxito dicha perturbación en losparámetros <strong>de</strong> la carga.5.5. ConclusionesEn este capítulo se ha presentado un controlador vectorial directo para un motor <strong>de</strong> inducciónaccionado mediante un inversor fuente <strong>de</strong> tensión controlado por corriente. Se hamostrado que este controlador es una aproximación ad-hoc al problema <strong>de</strong> convertir unsistema no lineal y <strong>de</strong>pendiente <strong>de</strong>l tiempo, con dos lazos <strong>de</strong> control acoplados; en un sistemalineal e invariante en el tiempo con sus dos lazos <strong>de</strong> control <strong>de</strong>sacoplados. Para ellose realiza una realimentación no lineal diseñada ad-hoc en lugar <strong>de</strong> mediante un procesosistemático como el presentado en el capítulo 2. El diseño realizado se ha comparado conel controlador Lyapunov-Integral <strong>de</strong>sarrollado en el capítulo 4, el cual se basa en un procesosistemático mediante el que se hace que una función <strong>de</strong> los errores <strong>de</strong> seguimiento ysus integrales sea <strong>de</strong> Lyapunov. Se ha mostrado que las ecuaciones finales <strong>de</strong> ambos controladoresson muy parecidas, por lo que su comportamiento también es prácticamente elmismo. En <strong>de</strong>finitiva se llega a resultados parecidos, sólo que recorriendo dos caminostotalmente distintos. Conviene <strong>de</strong>stacar sin embargo que la transformación no lineal paralinealizar el sistema realizada en el controlador vectorial es más simple que la utilizada enel controlador Lyapunov-Integral, por lo que el comportamiento <strong>de</strong>l primero es un pocomejor cuando se implanta el sistema en tiempo discreto o cuando existen errores en losparámetros.
Capítulo 6Estimación <strong>de</strong>l flujo <strong>de</strong> rotor6.1. IntroducciónEn todos los controladores propuestos en los capítulos 2, 3 y 4 es necesario conocerla magnitud <strong>de</strong>l vector <strong>de</strong> flujo <strong>de</strong> rotor, ya que es una <strong>de</strong> las variables controladas porel sistema. A<strong>de</strong>más en las implantaciones en ejes <strong>de</strong> flujo <strong>de</strong> rotor es necesario conocertambién el ángulo <strong>de</strong>l vector <strong>de</strong> flujo para po<strong>de</strong>r realizar el control en estas coor<strong>de</strong>nadas.Sin embargo tanto el módulo como el ángulo <strong>de</strong>l vector <strong>de</strong> flujo <strong>de</strong> rotor son difíciles<strong>de</strong> medir, por lo que han <strong>de</strong> ser estimados. En este capítulo se revisan varias alternativaspara la estimación <strong>de</strong>l flujo <strong>de</strong> rotor, mostrándose sus prestaciones cuando se implantancon un controlador no lineal Lyapunov-Integral. En primer lugar, en la sección 6.2, sepresentan dos estimadores <strong>de</strong> or<strong>de</strong>n reducido en bucle abierto, uno en ejes <strong>de</strong> flujo <strong>de</strong>rotor y otro en ejes <strong>de</strong> estator. La ventaja <strong>de</strong>l primero es su simplicidad, pero al ser unestimador no lineal, su discretización no pue<strong>de</strong> realizarse <strong>de</strong> manera exacta. El estimadoren ejes <strong>de</strong> estator es más complejo computacionalmente, pero en cambio si pue<strong>de</strong> serdiscretizado exactamente en ciertas circunstancias. El hecho <strong>de</strong> que estos estimadoressean <strong>de</strong> lazo abierto los hace muy sensibles a los parámetros <strong>de</strong> la máquina. De éstosparámetros merece especial atención la resistencia <strong>de</strong> rotor, que pue<strong>de</strong> variar hasta un100 % <strong>de</strong> su valor nominal durante la operación <strong>de</strong> la máquina. Para evitar la <strong>de</strong>gradación<strong>de</strong> las prestaciones <strong>de</strong> estos estimadores cuando la resistencia <strong>de</strong> rotor varía, en la sección6.3 se explica un estimador para corregir su valor. En la sección 6.4 se estudia unestimador <strong>de</strong> flujo integrado con un controlador Lyapunov-Integral, en el que se <strong>de</strong>fineuna función <strong>de</strong> Lyapunov que hace ten<strong>de</strong>r a cero tanto los errores <strong>de</strong> seguimiento comolos errores <strong>de</strong> estimación. Sin embargo los resultados obtenidos con este controlador sonpeores que los obtenidos con los estimadores tradicionales más el controlador Lyapunov-Integral. Por último, en la sección 6.5 se presenta un observador <strong>de</strong> or<strong>de</strong>n reducido enejes <strong>de</strong> estator muy común en la literatura. Se <strong>de</strong>scubre sin embargo que para su implantaciónes necesario recurrir a un cambio <strong>de</strong> variable <strong>de</strong>pendiente <strong>de</strong> la velocidad, quehace que su aplicación sea problemática cuando se producen transitorios <strong>de</strong> velocidad conaceleración gran<strong>de</strong>. Para solucionar este problema se propone una nueva implantación entiempo discreto en la que no es necesario realizar ningún cambio <strong>de</strong> variable, mostrándosemediante simulación que se produce un buen comportamiento <strong>de</strong>l conjunto controladory observador, incluso durante los transitorios <strong>de</strong> velocidad con aceleración elevada.
¢78 Estimación <strong>de</strong>l flujo <strong>de</strong> rotor6.2. Estimadores <strong>de</strong> or<strong>de</strong>n reducido en lazo abiertoEstos estimadores consisten en un simulador <strong>de</strong> las ecuaciones dinámicas <strong>de</strong> la máquina;son simples y presentan una baja carga computacional. Su principal inconveniente radicaen una limitada (y no controlable) velocidad <strong>de</strong> convergencia y en una elevada sensibilidada errores en los parámetros <strong>de</strong> la máquina (Verghese y San<strong>de</strong>rs, 1988).En primer lugar se presenta un estimador en ejes <strong>de</strong> flujo <strong>de</strong> rotor. Esta podría parecerla solución natural cuando el controlador se implanta en estos ejes. Sin embargo al ser unestimador no lineal, su discretización no pue<strong>de</strong> realizarse <strong>de</strong> manera exacta, por lo quenecesita una frecuencia <strong>de</strong> muestreo elevada si no se pue<strong>de</strong> tolerar un error excesivo enla estimación. Una posible solución consiste en usar un estimador expresado en ejes <strong>de</strong>estator, siendo en este caso un sistema lineal 1 cuya discretización pue<strong>de</strong> realizarse <strong>de</strong>manera exacta.Ambos estimadores son muy sensibles a los errores en los parámetros <strong>de</strong> la máquina.De todos ellos merece especial atención la resistencia <strong>de</strong> rotor, que varía apreciablementedurante la operación <strong>de</strong>l accionamiento. Por ello se propone el uso en tiempo real <strong>de</strong>lestimador <strong>de</strong> resistencia <strong>de</strong> rotor presentado en la Sección 6.3. Sin embargo, conviene<strong>de</strong>stacar que según algunos autores (Tzou, 1996), la variación <strong>de</strong> la resistencia <strong>de</strong> rotorsólo es importante en motores <strong>de</strong> gran potencia, siendo insignificante en motores <strong>de</strong> bajapotencia (en el rango <strong>de</strong> un C.V.).6.2.1. Estimador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> flujoEste estimador se basa en el mo<strong>de</strong>lo <strong>de</strong>l motor en ejes <strong>de</strong> flujo presentado en la SecciónA.2.3. A partir <strong>de</strong> la última fila <strong>de</strong> la ecuación (A.14) se establece la ecuación <strong>de</strong>lestimador <strong>de</strong>l flujo en eje d (que en este sistema <strong>de</strong> referencia coinci<strong>de</strong> con su módulo)como:d ˆψ r Rd¡ Di r Sd E ˆψ r Rd (6.1)dtEn don<strong>de</strong> el valor estimado se ha distinguido mediante el símboloˆ(véase ˆψ r Rdpor ejemplo).La velocidad <strong>de</strong> giro <strong>de</strong>l flujo se estima a partir <strong>de</strong> (A.17) según:ˆω S ¡ ω R¢Di r Sqˆψ r Rd(6.2)Integrando ˆω S se obtiene el ángulo <strong>de</strong>l vector <strong>de</strong> flujo (que coinci<strong>de</strong> con el ángulo <strong>de</strong>l ejed en este sistema <strong>de</strong> referencia):ˆθ S ¡ ˆω S dt (6.3)La dinámica <strong>de</strong>l error <strong>de</strong> estimación se pue<strong>de</strong> obtener a partir <strong>de</strong> (A.14) y (6.1):ddt ¡ ˆψr Rd¡ ψ r Rd¢ ¡ E ¡ ˆψ r Rd¡ ψ r Rd¢ (6.4)Por tanto el error <strong>de</strong> estimación tien<strong>de</strong> a cero con una constante <strong>de</strong> tiempo igual 1£ a E,que según se muestra en el Apéndice A es igual ¡La RR R. A<strong>de</strong>más, se pue<strong>de</strong> <strong>de</strong>mostrar(García Cerrada, 1991) que la componente en eje q <strong>de</strong>l flujo <strong>de</strong> rotor ψ r Rq tien<strong>de</strong> a cero,lo que garantiza la orientación al campo <strong>de</strong>l controlador.1 El estimador se pue<strong>de</strong> consi<strong>de</strong>rar lineal si se supone que la velocidad no varía apreciablemente <strong>de</strong>ntro <strong>de</strong>lperiodo <strong>de</strong> muestreo, <strong>de</strong> forma que se pueda consi<strong>de</strong>rar como un parámetro.
6.2 Estimadores <strong>de</strong> or<strong>de</strong>n reducido en lazo abierto 79Implantación en tiempo discretoComo se pue<strong>de</strong> apreciar en la ecuación (6.2), el estimador propuesto no es lineal,por lo que no se pue<strong>de</strong> discretizar exactamente. En este trabajo se han realizado las integracionesnecesarias para calcular el flujo <strong>de</strong> rotor ˆψ r Rd y <strong>de</strong>l ángulo ˆθ S según la reglarectangular:¨ˆθ S©k1 ¡¨ˆθ S©k¡ ˆψ r Rd¢k 1 ¡ ¡ ˆψ r Rd¢kd ˆψ r Rd¢T s (6.5)dt k¡¢¡ ˆω S ¢ k T s (6.6)6.2.2. Estimador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estatorEste estimador está basado en el mo<strong>de</strong>lo <strong>de</strong>l motor en ejes <strong>de</strong> estator, presentado enla Sección A.2.2. Teniendo en cuenta las dos últimas filas <strong>de</strong>l mo<strong>de</strong>lo <strong>de</strong>l motor (A.10)se pue<strong>de</strong> establecer un estimador para el vector <strong>de</strong> flujo como:ddt¦ˆψ s Rdˆψ s Rq§¡¦Eω R E§¡ ω RRq§¢¦ˆψ s Rd¦D 0ˆψ s0 D§¦i s Sdi s Sq§(6.7)La ecuación (6.7) se pue<strong>de</strong> escribir <strong>de</strong> forma compleja según:ddtˆsRψ ¡a¤E jω ¡ˆsR Rψ ¢¢ ¢¡¥¢b¡£¢¤D ı s S (6.8)La dinámica <strong>de</strong>l error <strong>de</strong> estimación se pue<strong>de</strong> obtener a partir <strong>de</strong> (A.10) y (6.7):ddt¦ˆψ s ψ s Rdˆψ s Rq¡ ψ s Rq§¡¦ERd¡ω R E§¡ ω R¦ˆψ s Rd¡ ψ s Rdˆψ s Rq¡ ψ s Rq§(6.9)Por tanto el error <strong>de</strong> estimación ten<strong>de</strong>rá a cero también según la constante <strong>de</strong> tiempo 1£ E.Implantación en tiempo discretoComo se pue<strong>de</strong> apreciar en (6.7), si la velocidad <strong>de</strong>l rotor ω R es constante, el estimadorexpresado en ejes <strong>de</strong> estator se pue<strong>de</strong> consi<strong>de</strong>rar lineal e invariante en el tiempo.En este caso el estimador se pue<strong>de</strong> discretizar exactamente. Como las entradas <strong>de</strong>l estimadorson las corrientes y éstas cuando el motor se alimenta con un inversor fuente <strong>de</strong>tensión evolucionan siguiendo exponenciales, es más apropiado usar una discretizaciónque consi<strong>de</strong>re que las entradas evolucionan según un retenedor <strong>de</strong> primer or<strong>de</strong>n (ZamoraMacho, 1997). En este caso la ecuación (6.8) expresada en tiempo discreto es:Rψ¢ˆskEn don<strong>de</strong>:e aT s ˆsRψ¢ k ¡y T s es el periodo <strong>de</strong> muestreo.¢ b 11 a eaT saT1¡ ¢s ¡e aT s¡ e ET s¡ cos¡ ω R T s ¢¢¡ba 1 ¢ 1aT s1¡e aT ¡ ı s S¢k 1 ¡ ¡ s¢j sin¡ ω R T s ¢ ¢ (6.11)e aT ¡ ¡ ı s S¢k(6.10)s¢
80 Estimación <strong>de</strong>l flujo <strong>de</strong> rotorˆs1.61.20.80.40040024Rψ (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10122000-200-40002468101214Figura 6.1: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes <strong>de</strong>rotor.6.2.3. Resultados <strong>de</strong> simulaciónPara evaluar las prestaciones <strong>de</strong> los dos estimadores propuestos, se han realizadovarias simulaciones <strong>de</strong> los estimadores <strong>de</strong>sarrollados en esta sección junto con el controladorLyapunov-Integral <strong>de</strong>sarrollado en la Sección 4.3. Las simulaciones se han realizadosobre el mismo motor <strong>de</strong> 250 W usado en la Sección 4.4.2 y bajo las mismascondiciones. Las ganancias <strong>de</strong>l controlador Lyapunov-Integral se han elegido: k 1 ¡ 100,I 1 ¡ 4, k 2 ¡ 50 y I 2 ¡ 8.En primer lugar se ha realizado una simulación usando un inversor fuente <strong>de</strong> tensióncontrolado en corriente. Como regulador <strong>de</strong> corriente se ha implantado un PI con unapulsación natural no amortiguada <strong>de</strong> 250rad£ s y un factor <strong>de</strong> amortiguamiento <strong>de</strong> 1 2 . Elperiodo <strong>de</strong> muestreo <strong>de</strong>l controlador y <strong>de</strong>l estimador ha sido <strong>de</strong> 1 ms. En la figura 6.1 semuestran los resultados para el estimador implantado en ejes <strong>de</strong> rotor <strong>de</strong>sarrollado en laSección 6.2.1 y en la figura 6.2 se muestran los resultados obtenidos cuando se implantael estimador en ejes <strong>de</strong> estator <strong>de</strong>sarrollado en la Sección 6.2.2. Como se pue<strong>de</strong> apreciaren las figuras, la simulación ha consistido en un cambio <strong>de</strong> sentido <strong>de</strong> giro con bajaaceleración <strong>de</strong>s<strong>de</strong> t ¡ 3 s hasta t ¡ 6 s, seguido <strong>de</strong> otro cambio <strong>de</strong> sentido <strong>de</strong> giro con altaaceleración <strong>de</strong>s<strong>de</strong> t ¡ 7 s hasta t ¡ 7¢ 5 s. En ambos casos se produce error significativoen régimen permanente aún cuando no existen errores en los parámetros. Concretamenteel error cometido en el estimador en ejes <strong>de</strong> rotor es <strong>de</strong> 5,05 % y el cometido por elestimador en ejes <strong>de</strong> estator es <strong>de</strong> un 4,25 %. Por tanto, teniendo en cuenta que la mejorano es muy significativa, pue<strong>de</strong> no estar justificado en la mayoría <strong>de</strong> las aplicaciones eluso <strong>de</strong>l estimador en ejes <strong>de</strong> estator, pues su carga computacional es mucho más elevada.Para mostrar la sensibilidad <strong>de</strong> los estimadores con respecto a la resistencia <strong>de</strong> rotor,se ha variado ésta linealmente <strong>de</strong>s<strong>de</strong> su valor nominal en t ¡ 8 s hasta un 150 % <strong>de</strong> dicho
6.2 Estimadores <strong>de</strong> or<strong>de</strong>n reducido en lazo abierto 811.61.20.80.40024ˆs ψ R (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10124002000-200-40002468101214Figura 6.2: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes <strong>de</strong>estator.valor nominal en t ¡ 9¢ 5 s, produciéndose dos nuevos cambios <strong>de</strong> sentido <strong>de</strong> giro paramostrar la respuesta transitoria <strong>de</strong>l estimador cuando varía R R . El primer cambio <strong>de</strong> sentido<strong>de</strong> giro se ha producido en t ¡ 8¢ 5 s, cuando la resistencia está todavía incrementandosu valor y el segundo en t ¡ 10 s, cuando el valor <strong>de</strong> la resistencia es ya constante. Enambos casos el error cometido por el estimador es sólo apreciable en régimen transitorio<strong>de</strong> la velocidad, siendo a<strong>de</strong>más proporcional al error en R R .Por último en t ¡ 13 s se ha realizado un incremento el par <strong>de</strong> carga <strong>de</strong>s<strong>de</strong> 0¢ 001 Nmrad el s ω Rhasta 0¢ 003 Nmrad el s ω R, pudiéndose apreciar que dicho cambio produce también un errorsignificativo en la estimación <strong>de</strong>l flujo.Se ha comprobado que los errores que se producen en régimen permanente en losestimadores son <strong>de</strong>bidos principalmente al retraso introducido por los controladores <strong>de</strong>corriente <strong>de</strong>l inversor fuente <strong>de</strong> tensión controlado en corriente. En la figura 6.3 se muestrauna simulación <strong>de</strong>l controlador con el estimador en ejes <strong>de</strong> rotor, realizada en lasmismas condiciones que la <strong>de</strong> la figura 6.1 salvo que se ha usado un inversor fuente <strong>de</strong>corriente. Como se pue<strong>de</strong> apreciar el comportamiento mejora notablemente, siendo elerror en régimen permanente <strong>de</strong> un 0,46 % (0,31 % para el estimador en ejes <strong>de</strong> estator).Una alternativa al uso <strong>de</strong> un inversor fuente <strong>de</strong> corriente es el aumento <strong>de</strong> la velocidad<strong>de</strong> los reguladores <strong>de</strong> corriente <strong>de</strong>l inversor fuente <strong>de</strong> tensión controlado en corriente,lo cual sólo pue<strong>de</strong> realizarse con un aumento simultáneo <strong>de</strong> la frecuencia <strong>de</strong> muestreo.En la figura 6.4 se muestra una simulación <strong>de</strong>l accionamiento con el estimador en ejes<strong>de</strong> flujo <strong>de</strong> rotor realizada en las mismas condiciones que la <strong>de</strong> la figura 6.1, salvo quese ha usado un regulador <strong>de</strong> corriente PI con una pulsación natural no amortiguada <strong>de</strong>500rad£ 2 2 y que el periodo <strong>de</strong> muestreo es <strong>de</strong> 0,5 ms. Como se pue<strong>de</strong> apreciar el erroren régimen permanente no es muy elevado, concretamente un 1,3 % para el estimador en2 El factor <strong>de</strong> amortiguamiento sigue siendo igual a 1 2 .
82 Estimación <strong>de</strong>l flujo <strong>de</strong> rotorˆs1.61.20.80.40040024Rψ (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10122000-200-40002468101214Figura 6.3: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes <strong>de</strong>flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> corriente.ejes <strong>de</strong> flujo <strong>de</strong> rotor y un 1,1 % para el estimador en ejes <strong>de</strong> estator.6.3. Estimador <strong>de</strong> la resistencia <strong>de</strong>l rotorLos estimadores en lazo abierto <strong>de</strong>scritos en las secciones 6.2.1 y 6.2.2 son muysensibles a las variaciones en la resistencia <strong>de</strong>l rotor. En este trabajo, para mejorar larobustez <strong>de</strong>l controlador, se ha usado el estimador <strong>de</strong> resistencia <strong>de</strong> rotor presentadoen (García-Cerrada y Zamora, 1997), que se basa en un mo<strong>de</strong>lo <strong>de</strong> regresión lineal <strong>de</strong>lmotor. A continuación se muestran los pasos fundamentales <strong>de</strong>l algoritmo <strong>de</strong> estimación.Los <strong>de</strong>talles se pue<strong>de</strong>n estudiar mejor en (Zamora Macho, 1997), don<strong>de</strong> también se ofreceun estudio <strong>de</strong> la sensibilidad <strong>de</strong>l algoritmo.En la sección A.3.2 se <strong>de</strong>muestra que el mo<strong>de</strong>lo estándar <strong>de</strong>l motor <strong>de</strong> inducción encoor<strong>de</strong>nadas <strong>de</strong> estator se pue<strong>de</strong> escribir como:don<strong>de</strong>:¡£¢ 1¡ ¡¤ ¡¥¢ ¤yuv jω R v 1 dt R Rv 1 u s S¡ R ¡ S ı s σL S¡dSv 2 u s S¡ R ¡ S ı s S¡1L¡v 2 dt¡ (6.12)Rdt ıs S (6.13)dL Sdt ıs S (6.14)Este mo<strong>de</strong>lo formado por las ecuaciones (6.12)–(6.14) será el usado para la estimación <strong>de</strong>la resistencia <strong>de</strong> rotor. Claramente R R es un escalar que relaciona los números complejos
6.3 Estimador <strong>de</strong> la resistencia <strong>de</strong>l rotor 83ˆs1.61.20.80.40040024Rψ (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10122000-200-40002468101214Figura 6.4: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes <strong>de</strong>flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> tensión y T s ¡ 0¢ 5 ms.u e y, los cuales son in<strong>de</strong>pendientes <strong>de</strong> R R . Por tanto es posible calcular la resistencia <strong>de</strong>lrotor como el cociente <strong>de</strong> los módulos <strong>de</strong> ambos números complejos. Nótese que las integralesy las <strong>de</strong>rivadas necesarias en las ecuaciones (6.12)–(6.14) pue<strong>de</strong>n ser calculadasmediante filtros paso-banda en variables <strong>de</strong> estado. En (García-Cerrada et al., 1994) se<strong>de</strong>muestra que sólo es necesario tener en cuenta el primer armónico <strong>de</strong> las corrientes ytensiones <strong>de</strong>l motor, pues es el único que posee información significativa acerca <strong>de</strong> laresistencia <strong>de</strong>l rotor. Nótese también que ha <strong>de</strong> medirse la velocidad <strong>de</strong>l rotor ω R .El ruido presente en el cálculo directo <strong>de</strong> R R se pue<strong>de</strong> atenuar mediante un promediado<strong>de</strong> los valores calculados <strong>de</strong> R R . En (Zamora Macho, 1997) se propone el uso <strong>de</strong>un algoritmo <strong>de</strong> mínimos cuadrados totales (TLS) con este propósito. Como salida <strong>de</strong>lmo<strong>de</strong>lo <strong>de</strong> regresión se consi<strong>de</strong>ra el número complejo y y como regresor se consi<strong>de</strong>ra elcomplejo u. En cada periodo <strong>de</strong> muestreo se <strong>de</strong>finen dos vectores columna, que contienenlas muestras promediadas <strong>de</strong> los módulos <strong>de</strong> cada uno <strong>de</strong> estos números complejos:¡ ¡ λ¢ 1¡1¡ ¡ λ¢ ¡1 2U k u k λ 1 21 2Y k y k λ 1 2u k 1 ¤ ¤ ¤ λ i 2u ¡ k i ¤ ¤ ¤ ¡T¡y k 1 ¤ ¤ ¤ λ i 2y ¡ k i ¤ ¤ ¤ ¡T¡(6.15)(6.16)en don<strong>de</strong> i varía <strong>de</strong>s<strong>de</strong> 0 hasta k y λ es el factor <strong>de</strong> olvido, que es un número entre cero yuno. Un valor <strong>de</strong> λ igual a cero se correspon<strong>de</strong> con el cálculo directo <strong>de</strong> la resistencia <strong>de</strong>rotor en cada periodo <strong>de</strong> muestreo, mientras que el número <strong>de</strong> muestras tenidas en cuentaen el promediado se incrementa cuando λ se acerca a uno.Si la variación <strong>de</strong> R R se pue<strong>de</strong> <strong>de</strong>spreciar en la ventana <strong>de</strong> promediado, se pue<strong>de</strong><strong>de</strong>finir un mo<strong>de</strong>lo <strong>de</strong> regresión lineal para TLS como (Huffel y Van<strong>de</strong>walle, 1991):Y k¢EYk ¡ R Rk ¡ U k¢EUk¢ (6.17)
£££¢£ £££ Y k£££ £££ U k££££££££££84 Estimación <strong>de</strong>l flujo <strong>de</strong> rotoren don<strong>de</strong> EYk y E Ukson dos vectores que contienen los errores en el periodo <strong>de</strong> muestreok. Nótese que los errores se consi<strong>de</strong>ran tanto en las medidas <strong>de</strong> las entradas como <strong>de</strong>las salidas en la aplicación <strong>de</strong> TLS. La función <strong>de</strong> coste minimizada en TLS es el errorcuadrático pon<strong>de</strong>rado:£ ££ EUk22£ E££Y k22(6.18)don<strong>de</strong><strong>de</strong> la resistencia <strong>de</strong> rotor resulta:£ £U£££ k££ £££ Y k££X representa la norma-2 <strong>de</strong>l vector X. Si esta función se minimiza, la£££ estimación£££ˆR Rk ¡(6.19)Con el objeto <strong>de</strong> calcular la norma-2 <strong>de</strong> los vectores Y k y U k en tiempo real <strong>de</strong> formaeficiente, es necesario usar un método recursivo. Sin embargo sólo se pue<strong>de</strong> usar unaformulación recursiva para el cálculo <strong>de</strong> la norma-2 al cuadrado según:£ £££ U k£££ £££ Y k££22¡ λ¢ ¢ ££¡ £ ¡ 1¡ £££2u k λ U k21¡ ¡ 1¡ λ¢ y k2 ¢ λ£ Y k ¡ 12(6.20)(6.21)en don<strong>de</strong> se pue<strong>de</strong> apreciar que el factor <strong>de</strong> olvido λ <strong>de</strong>termina la constante <strong>de</strong> tiempo τ<strong>de</strong> la ventana exponencial aplicada a u 2 e y 2 según:τ ¡ ¡T slnλ(6.22)siendo T s el periodo <strong>de</strong> muestreo.Una medida útil <strong>de</strong> la exactitud <strong>de</strong> la estimación es el factor <strong>de</strong> correlación r k <strong>de</strong>finidocomo:r k ¡Y Tk U k(6.23)en don<strong>de</strong> Y Tk U k es el producto escalar entre U k y Y k , que se pue<strong>de</strong> calcular recursivamentesegún:Y Tk U k ¡ ¡ 1¡ λ¢ u k y k ¢ λY T k ¡ 1 U k ¡ 1 (6.24)£££ U k£ ££Este coeficiente <strong>de</strong> correlación no es más que el coseno <strong>de</strong>l ángulo formado por los vectoresU k y Y k . Este ángulo ha <strong>de</strong> ser cero si ambos vectores columna están relacionadosexactamente por un escalar: la resistencia <strong>de</strong> rotor. La estimación será mejor cuanto máscerca <strong>de</strong> la unidad esté el factor <strong>de</strong> correlación. Este factor se ha usado para <strong>de</strong>cidir si elvalor <strong>de</strong> la resistencia <strong>de</strong> rotor ha <strong>de</strong> ser actualizado en el periodo <strong>de</strong> muestreo k.6.3.1. Resultados <strong>de</strong> simulaciónPara validar las prestaciones <strong>de</strong>l estimador <strong>de</strong> resistencia <strong>de</strong> rotor se han realizadouna serie <strong>de</strong> simulaciones <strong>de</strong>l estimador junto con el controlador Lyapunov-Integral <strong>de</strong>sarrolladoen la Sección 4.3 con el estimador <strong>de</strong>l flujo <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> flujo<strong>de</strong> rotor mostrado en la Sección 6.2.1. Para ilustrar la mejora obtenida se ha realizado unasimulación en las mismas condiciones que la mostrada en la figura 6.4 <strong>de</strong> la sección 6.2.3,£££ Y k£ ££
6.3 Estimador <strong>de</strong> la resistencia <strong>de</strong>l rotor 851.61.20.80.40024ˆs ψ R (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10124002000-200-40002468101214Figura 6.5: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador en ejes <strong>de</strong>flujo <strong>de</strong> rotor con inversor fuente <strong>de</strong> tensión, estimador <strong>de</strong> R R y T s ¡ 0¢ 5 ms.pero incluyendo el estimador <strong>de</strong> resistencia <strong>de</strong> rotor <strong>de</strong>sarrollado en esta sección. El factor<strong>de</strong> olvido elegido ha sido λ ¡ 0¢ 995, lo que equivale a una constante <strong>de</strong> tiempo <strong>de</strong> laventana exponencial <strong>de</strong> τ ¡ 100 ms. A<strong>de</strong>más el valor estimado <strong>de</strong> R R sólo se ha actualizadocuando el factor <strong>de</strong> correlación r k ha sido mayor <strong>de</strong> 0,85. Conviene <strong>de</strong>stacar queesta es la primera vez que se simula el estimador <strong>de</strong> resistencia <strong>de</strong> rotor en lazo cerradojunto con un estimador <strong>de</strong> flujo y un controlador no lineal, ya que en (Zamora Macho,1997) sólo se ofrecen resultados <strong>de</strong> una ejecución en batch <strong>de</strong>l algoritmo.Como se pue<strong>de</strong> apreciar en la figura 6.5 la mejora <strong>de</strong> la estimación <strong>de</strong>l flujo conrespecto a la obtenida cuando no se estima la resistencia es notable. Compárese para ellola figura 6.5 con la figura 6.4. Sin embargo aún se produce un error durante el transitorio<strong>de</strong> velocidad producido en t ¡ 8¢ 5 s. Según se muestra en la figura 6.6, el estimador<strong>de</strong> resistencia <strong>de</strong> rotor sólo ofrece resultados aceptables durante el régimen permanente<strong>de</strong> la máquina. Debido a esto, durante los transitorios no se actualiza el valor <strong>de</strong> R R enlas ecuaciones <strong>de</strong>l estimador ni en las ecuaciones <strong>de</strong>l controlador, 3 tal como se pue<strong>de</strong>apreciar en la figura 6.6, en don<strong>de</strong> junto con el factor <strong>de</strong> correlación se muestra unavariable cuyo valor es uno cuando se actualizan los parámetros <strong>de</strong>l controlador y ceroen caso contrario. Conviene <strong>de</strong>stacar que, teniendo en cuenta que las variaciones <strong>de</strong> laresistencia <strong>de</strong>l rotor en una situación real son mucho más lentas que en la simulaciónrealizada, en la mayoría <strong>de</strong> las aplicaciones reales no se producirá un excesivo error en laestimación <strong>de</strong>l flujo.Por último, es necesario resaltar que el estimador presenta un error elevado cuandoel par <strong>de</strong> carga es pequeño. Este error es <strong>de</strong>bido a que a bajo par <strong>de</strong> carga el estimadores muy sensible a los errores en la medida <strong>de</strong> velocidad (Zamora Macho, 1997). En3 A<strong>de</strong>más durante los dos primeros segundos tampoco se usa el valor estimado <strong>de</strong> R R para evitar el transitorio<strong>de</strong> arranque.
86 Estimación <strong>de</strong>l flujo <strong>de</strong> rotor403020100010.50-0.5-10ˆR R (—) y R R (- -)24681012Factor <strong>de</strong> correlación (—) y actualización <strong>de</strong> parámetros (- -)246810121414Figura 6.6: Evolución <strong>de</strong> la estimación <strong>de</strong> R R , <strong>de</strong> su factor <strong>de</strong> correlación y <strong>de</strong> la actualización<strong>de</strong> los parámetros.la figura 6.6 se pue<strong>de</strong> apreciar que hasta t ¡ 13 s existe un pequeño error en R R , yaque durante todo ese tiempo el par <strong>de</strong> carga vale m l ¡ 0¢ 001 Nmrad el s ω R. Sin embargo apartir <strong>de</strong> t ¡ 13 s el par vale m l ¡ 0¢ 003 Nmrad el s ω R, con lo que la estimación <strong>de</strong> R R mejoranotablemente.6.4. Estimador <strong>de</strong> flujo <strong>de</strong> rotor integrado con un controladorLyapunov-Integral en ejes <strong>de</strong> flujoEl principio <strong>de</strong> separación (Kailath, 1980) no es aplicable a los sistemas no lineales.Por tanto pue<strong>de</strong> ser cuestionable la estabilidad <strong>de</strong> un controlador no lineal mediante realimentación<strong>de</strong>l estado cuando se usa un observador para obtener el valor <strong>de</strong> las variables<strong>de</strong> estado 4 . En (Marino et al., 1996) y en (Dawson et al., 1998) se propone el diseñoconjunto <strong>de</strong>l estimador y el controlador, <strong>de</strong>finiéndose una función <strong>de</strong> Lyapunov que asegureque tanto los errores <strong>de</strong> seguimiento como los errores <strong>de</strong> estimación tiendan a ceroexponencialmente.En (Marino et al., 1995) se utiliza un controlador <strong>de</strong> Lyapunov implantado en ejes<strong>de</strong> estator integrado con un estimador <strong>de</strong> flujo <strong>de</strong> rotor <strong>de</strong> or<strong>de</strong>n reducido implantadotambién en ejes <strong>de</strong> estator. En esta sección se presenta un diseño simular, pero integrandoel controlador Lyapunov-Integral presentado en el Capítulo 4 junto con un estimador<strong>de</strong> flujo <strong>de</strong> rotor <strong>de</strong> or<strong>de</strong>n reducido implantado en ejes <strong>de</strong> flujo basado en el que se hapresentado en la sección 6.2.1. Mediante una función <strong>de</strong> Lyapunov se asegura que tantolos errores <strong>de</strong> seguimiento <strong>de</strong>l flujo <strong>de</strong> rotor y <strong>de</strong> la velocidad como el error <strong>de</strong> estimación4 O <strong>de</strong> algunas <strong>de</strong> ellas en caso <strong>de</strong> usarse un observador <strong>de</strong> or<strong>de</strong>n reducido.
V t ¡¦ỹV t ¡¢¢¢¢6.4 Estimador <strong>de</strong> flujo <strong>de</strong> rotor integrado con un controlador Lyapunov. . . 87<strong>de</strong>l flujo <strong>de</strong> rotor tiendan a cero exponencialmente.Se <strong>de</strong>finen el error <strong>de</strong> seguimiento <strong>de</strong>l flujo estimado y el error <strong>de</strong> seguimiento <strong>de</strong> lavelocidad según:ỹ 1 ¡ ˆψ r Rd¡ ¡ ψ r Rd¢r(6.25)ỹ 2 ¡ ω R¡ ω Rr (6.26)Si se establece la misma candidata a función <strong>de</strong> Lyapunov <strong>de</strong> la sección 4.2 (eq. 4.4):122∑i 1ỹ i¢I i ỹ i dt¡2(6.27)y si se calcula su <strong>de</strong>rivada, aplicando (6.1), (4.32) y (4.33) se obtiene:ddt V t ¡ ỹ 1¢I 1ỹ 1 dt¡ Di r Sdỹ 2¢I 2E ˆψ r ddt ψr Rd¢¢r¡ Rd¡I 1 ỹ 1¡¢Pỹ 22J¨Gψ r Rd ir m dt¡ ¡ddt ω ¡ R¢ (6.28)r¡ Sq¡ l©Don<strong>de</strong> se aprecia que en el segundo término aparece el valor <strong>de</strong> flujo, <strong>de</strong>l cual sólo seposee una estimación. Si se <strong>de</strong>fine el error <strong>de</strong> estimación <strong>de</strong>l flujo ˘ψ Rd como:˘ψ Rd ¡ ˆψ Rd¡ ψ Rd (6.29)se pue<strong>de</strong> sustituir el valor <strong>de</strong>l flujo por ψ Rd ¡ ˆψ Rd¡ ˘ψ Rd en (6.28), obteniéndose:ddt V t ¡ ỹ 1¢I 1ỹ 2¢ỹ 1 dt¡ Di r SdI 2E ˆψ r ddt ψr Rd¢¢r¡ Rd¡I 1 ỹ 1¡¢Pỹ 2 ˆψ2J¨G r Rd ir m dt¡ ¡ddt ω ¡ R¢¢rSq¡ l©ỹ 2¢I 2I 2 y˜¡ 2¡ỹ 2 dt¡P2J G ˘ψr Rd ir Sq (6.30)En el Capítulo 4 se ha mostrado que mediante el uso <strong>de</strong> un inversor <strong>de</strong> corriente se pue<strong>de</strong>nforzar las corrientes i r Sd e ir Sq <strong>de</strong> forma que la <strong>de</strong>rivada <strong>de</strong> V t sea semi<strong>de</strong>finida negativa. Encambio en la ecuación (6.30) se pue<strong>de</strong> apreciar que el último término <strong>de</strong> la <strong>de</strong>rivada <strong>de</strong>V t contiene el error <strong>de</strong> estimación <strong>de</strong>l flujo <strong>de</strong> rotor ˘ψ r Rd, el cual es <strong>de</strong>sconocido, lo queimpi<strong>de</strong> garantizar quedt d V t sea semi<strong>de</strong>finida negativa. Para eliminar este último término<strong>de</strong> la ecuación (6.30) se pue<strong>de</strong> <strong>de</strong>finir un nuevo estimador <strong>de</strong> flujo <strong>de</strong> rotor:d ˆψ r Rddt¡ Di r SdE ˆψ r Rdλ ỹ 2¢I 2ỹ 2 dt¡P2J Gir Sq (6.31)en don<strong>de</strong> λ ¦ 0 es un parámetro que permite ajustar la influencia <strong>de</strong> la compensación. Sise <strong>de</strong>fine una candidata a función <strong>de</strong> Lyapunov que contenga el error <strong>de</strong> estimación <strong>de</strong>lflujo <strong>de</strong> rotor:121¢I 1 ỹ 1 dt¡2 ¢ỹ 2¢2 ¢ 1I 2 ỹ 2λ ˘ψr Rd¢ (6.32)2§ ¡ dt¡
¢¢¢¢¢¢¢¢¢¢88 Estimación <strong>de</strong>l flujo <strong>de</strong> rotorsu <strong>de</strong>rivada tiene por expresión:ddt V t ¡ ỹ 1¢Di r SdI 1 ỹ 1 dt¡ ¤E ˆψ r Rdλ ỹ 2¢I 2P dỹ 22J Gir dt ψr ¢RdrSq¡ dt¡I 1 ỹ 1¡¢¢ỹ 2¢I 2 ỹ 2 dt¡ ¤Pˆψ2J¨G r Rd ir m ¡ddt ω ¡ R¢¢rl© Sq¡¢ 1λ ˘ψr RdI 2 ỹ 2¡ ¡ ỹ 2¢E ˘ψ r Rdλ ỹ 2¢Don<strong>de</strong> se ha sustituido la <strong>de</strong>rivada <strong>de</strong> ˘ψ Rd por su valor:ddt ˘ψ ¡dRddt ˆψ ddt ψ Rd ¡Rd¡Di r Sd E ˆψ r Rd λ ỹ ¡¢2I 2I 2I 2Pỹ 22J G ˘ψ Rdi r ¢Sqdt¡ỹ 2 dt¡P2J Gir Sq¡ (6.33)ỹ 2 dt¡P2J Gir Sq¡ Di r Sd¡ Eψ r Rd ¡E ¡¢P¢˘ψ Rd λ ỹ 2 I 2 ỹ 22J Gir dt¡ Sq (6.34)Simplificando y agrupando términos en (6.33) se obtiene:ddt V t ¡ ỹ 1¢I 1ỹ 1 dt¡ Di r SdE ˆψ r ddt ψr ¢RdrRd¡I 1 ỹ 1¡¢¢ỹ 2¢I 2 ỹ 2 dt¡ ¤Pˆψ2J¨G r Rd ir m ¡ddt ω ¡ R¢¢rl© Sq¡I 2 ỹ 2¢λ ỹ 1¢I 1ỹ 1 dt¡P2J Gir Sq¡¢λ ˘ψr Rd¢2(6.35)Si se diseña un controlador que fuerce las corrientes i r Sd e ir Sq para que se cumpla:¡¡¢¡¢k 1 ỹ 1k 2 ỹ 2I 1La <strong>de</strong>rivada <strong>de</strong> V t valdrá:ỹ 1 dt¡ ¡ Di r SdI 2 ỹ 2 dt¡ ¡ddt V t ¡ ¡ k 1 ỹ 1¢que, teniendo en cuenta que E ¡ ¡RE ˆψ r ddt ψr ¢RdrRd¡P2J¨G ˆψ r Rd ir Sq¡ m l©λ ỹ 1¢I 1I 1 ỹ 1 dt¡2¡ k 2 ỹ 2¢RL R¢ EI 1 ỹ 1 (6.36)ddt ω R¢ r I ¡¢2 ỹ 2Pỹ ¡ 12J Gir Sq (6.37)dt¡I 2 ỹ 2 dt¡2 ¢ 1λ E ˘ψ2 Rd (6.38)es menor que cero, garantiza la convergencia exponencial<strong>de</strong>l valor estimado <strong>de</strong>l flujo <strong>de</strong> rotor y <strong>de</strong> la velocidad a sus referencias y <strong>de</strong>lestimador <strong>de</strong> flujo <strong>de</strong> rotor al valor real <strong>de</strong> éste.Las ecuaciones <strong>de</strong>l controlador se <strong>de</strong>ducen <strong>de</strong> (6.36) y (6.37):i r Sd ¡¡ k 1 ¡ ỹ 1¢i r Sq ¡¡ k 2 ¡ ỹ 2¢I 1ỹ 1 dt¢ ¡ I 1 ỹ 1¡ E ˆψ r RdDI 2 ỹ 2 dt¢ ¡ I 2 ỹ 2¢ ddt¡ ω R ¢ rP2J G¨ˆψ r Rdλ¡ ỹ 1¢¢ ddtψ r Rdr¢ P2Jm l(6.39)I 1 ỹ 1 dt¢©(6.40)
6.4 Estimador <strong>de</strong> flujo <strong>de</strong> rotor integrado con un controlador Lyapunov. . . 891.61.20.80.40024ˆs ψ R (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10124002000-200-40002468101214Figura 6.7: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Estimador integradocon el controlador Lyapunov-Integral. T s ¡ 0¢ 5 ms.¢don<strong>de</strong> se pue<strong>de</strong> apreciar que el término ỹ 1 I 1 ỹ 1 dt es común a ambas ecuaciones, loque provocará un cierto acoplamiento entre ambos bucles <strong>de</strong> control.6.4.1. Resultados <strong>de</strong> simulaciónPara evaluar las prestaciones <strong>de</strong>l controlador propuesto se ha realizado una simulaciónen las mismas condiciones que la realizada para el estimador en ejes <strong>de</strong> flujo <strong>de</strong>rotor mostrada en la figura 6.4 <strong>de</strong> la sección 6.2.3, pero sustituyendo en el estimador laecuación (6.1) por (6.31) y en el controlador la segunda fila <strong>de</strong> la ecuación (4.42) por(6.40).En la figura 6.7 se muestra la evolución <strong>de</strong> la estimación <strong>de</strong>l flujo para λ ¡ 0¢ 0001,pudiéndose apreciar que el comportamiento es peor que en el estimador convencionalmostrado en la figura 6.4, especialmente en los pasos por cero <strong>de</strong> la velocidad cuandola aceleración es alta. Si se hace λ ¡ 0¢ 001, el sistema se hace inestable precisamenteen el primer paso por cero <strong>de</strong> la velocidad con alta aceleración (t ¡ 7¢ 25 s) y si se haceλ ¡ 0¢ 00001 el comportamiento <strong>de</strong>l sistema es prácticamente el mismo que el obtenidopor el estimador convencional, mostrado en la figura 6.4. En (Marino et al., 1996) sehace λ ¡ 0¢ 00001, sin embargo en este trabajo se ha optado por usar el estimador en ejes<strong>de</strong> flujo <strong>de</strong> rotor convencional, ya que usar dicho valor <strong>de</strong> λ es prácticamente lo mismoque no usar nada, 5 con lo que no se justifica el mayor coste computacional <strong>de</strong>l estimadorintegrado con el controlador mostrado en esta sección.5 Véanse las ecuaciones (6.31) y (6.40).
¡¡¡¢¤ £¤¤¡¡¡¢B¤ £¤¦¤¡¡¡¢¤ £¤¦¤¢¡¡¡¢¤ £¤¦¤90 Estimación <strong>de</strong>l flujo <strong>de</strong> rotor6.5. Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estatorComo se ha visto en la Sección 6.2, al ser los estimadores propuestos sistemas en lazoabierto, se producen errores apreciables en la estimación <strong>de</strong>l flujo <strong>de</strong> rotor en presencia<strong>de</strong> errores en los parámetros. En la Sección 6.3 se ha diseñado un estimador <strong>de</strong> resistencia<strong>de</strong> rotor, mostrándose que su aplicación junto con el estimador <strong>de</strong> flujo proporciona resultadossatisfactorios, aún cuando existan variaciones en la resistencia <strong>de</strong> rotor <strong>de</strong>bidosal calentamiento <strong>de</strong> la máquina. En esta sección se presenta como alternativa el uso <strong>de</strong>un observador para el flujo <strong>de</strong> rotor, que al ser una solución en bucle cerrado promete sermás robusta frente a cambios en los parámetros <strong>de</strong> la máquina. Aún así, dicho observadorpue<strong>de</strong> ser inestable cuando la variación <strong>de</strong> la resistencia <strong>de</strong> rotor sea elevada, tal como semostrará en la sección 6.5.56.5.1. Diseño <strong>de</strong>l observadorSe parte <strong>de</strong>l mo<strong>de</strong>lo en ejes <strong>de</strong> estator <strong>de</strong> la máquina presentado en la sección A.2.2: 6A¤ ¡£¢x¤ ¡¥¢B¤ ¡¥¢ddti s Sdi s Sqψ s Rdψ s Rq¦¡dω Rdt¡¡A 0 B Cω R0 A Cω R B¡ D 0 E ω R0 D ω R Ei s Sdi s Sqψ s Rdψ s RqF 00 F0 00 0u¦u s Sdu s (6.41)¡£¢ ¤Sq§¡ e¡ ¢G¡ Sq¡ ¡ Sd¢P2J m m l (6.42)m e ψ s Rd is ψ s Rq is (6.43)don<strong>de</strong> se pue<strong>de</strong> apreciar que las únicas variables <strong>de</strong> estado accesibles son las corrientes<strong>de</strong> estator.Se pue<strong>de</strong> plantear un observador <strong>de</strong> or<strong>de</strong>n reducido <strong>de</strong>l flujo partiendo <strong>de</strong> las dosúltimas filas <strong>de</strong> (6.41) y añadiendo un término <strong>de</strong> realimentación (Verghese y San<strong>de</strong>rs,1988):ddt¦ˆψ s Rdˆψ s Rq§¡¦D 00 D§¦i s Sdi s Sq§¢¦E ¡ ω Rω R E§¦ˆψ s Rdˆψ s Rq§¢K f Rψ¢ ¡ˆs¡ f ψ s (6.44)R¢¢en don<strong>de</strong> ¡ f ψ s es una función <strong>de</strong>l flujo, fˆsR¢ ψ¢ Res una matriz <strong>de</strong> ganancias.Para obtener la función ¡ f ψ s pue<strong>de</strong> usarse la dinámica <strong>de</strong> las corrientes, que vieneR¢dada por la ecuación:ddt¦i s Sdi s Sq§¡¦A 0i s Sq§¡00A§A§¦i s Sdi s Sq§¢¦i s Sq§¡Cω RCω ¡ R0B§F§¦ψ s Rdψ s Rq§¢¦F 00 F§¦u s Sdu s Sq§(6.45)es una función <strong>de</strong>l flujo estimado y Kagrupando los términos que pue<strong>de</strong>n obtenerse a partir <strong>de</strong> las medidas, se pue<strong>de</strong> escribir:d¦i s Sd¦A 0¦i s Sd¦F 0¦u s SdCω R¦ψ s Rddtψ s (6.46)Rq§u s Sq§¡¦B6 Nótese que a las matrices <strong>de</strong> la ecuación <strong>de</strong> estado <strong>de</strong> la máquina se les ha <strong>de</strong>nominado A y B. Éstas nohan <strong>de</strong> confundirse con los parámetros A y B <strong>de</strong> la máquina.¡ Cω R B§
¢f ¡ ψ s R¢ ¡¦BB6.5 Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator 91Si se <strong>de</strong>fine f ¡ ψ s R¢ como:Cω R¡ Cω R B§¦ψ s Rdψ s Rq§(6.47)y f Rψ¢ˆscomo:fˆsR ψ¢ ¡¦BCω R¡ Cω R B§¦ˆψ s Rdˆψ s Rq§(6.48)la ecuación (6.44) se convierte en:ddt¦ˆψ s Rdˆψ s Rq§¡¦D 00 D§¦i s Sdi s Sq§¢¦E ¡ ω Rω R E§¦ˆψ s Rdˆψ s Rq§¢K¦Cω R¦ˆψ s Rdˆψ s Rq§¡Cω R¦ψ s Rdψ s Rq§¢¡(6.49)La dinámica <strong>de</strong>l error <strong>de</strong> estimación e ¡ˆsR ψ¡¡ Cω R B§ψ s Rviene dada por:¡ Cω R B§d¦Edt e ¡ ω R B Cω Re (6.50)ω¡R ¡ Cω E§¢R B§£¡que como se pue<strong>de</strong> apreciar <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la velocidad <strong>de</strong>l rotor. Por tanto si se <strong>de</strong>sea quelos polos <strong>de</strong>l observador estén situados en una posiciónK¦fija, in<strong>de</strong>pendiente <strong>de</strong> ω R , ha <strong>de</strong>calcularse la ganancia <strong>de</strong>l observador K para cada punto <strong>de</strong> trabajo <strong>de</strong>l motor (Verghesey San<strong>de</strong>rs, 1988). Este cálculo se pue<strong>de</strong> hacer, por ejemplo, usando la función place <strong>de</strong>MATLAB y almacenando los resultados en una tabla, obteniéndose los valores <strong>de</strong> K enel observador en tiempo real mediante interpolación (García Cerrada, 1991) o bien sepue<strong>de</strong> buscar una expresión analítica <strong>de</strong> K que pueda ser usada en tiempo real. Para ellono hay más que calcular los autovalores <strong>de</strong> la matriz A e y obtener el valor <strong>de</strong> K que sitúelos autovalores en la posición <strong>de</strong>seada. Dicha expresión no ha <strong>de</strong> ser muy compleja convistas a su aplicación en tiempo real en un microprocesador.Hasta ahora no se ha dado ningún valor a la ganancia ¡ K. Si se elige K k 1 I, ladinámica <strong>de</strong>l error vendrá dada por:A e¡£¢ ¤¦Bddt e E¦¡¢ k 1 B ¡ ω R¢k 1 Cω Rω R¡ k 1 Cω R E ¢ k 1 B §y los autovalores <strong>de</strong> esta matriz tienen por expresión:e (6.51)E ¢ Bk 1 ω R ¡1 ¢ 2Ck 1¡ C 2 k 2 1(6.52)en don<strong>de</strong> se pue<strong>de</strong> apreciar que se fijan simultáneamente la parte real y la parte imaginaria<strong>de</strong> los autovalores. Es mejor tener un grado <strong>de</strong> libertad adicional que permita situar losdos autovalores conjugados en cualquier posición <strong>de</strong>l plano complejo. Para ello se eligeKk1 k2k2 k1, con lo que la dinámica <strong>de</strong>l error será ahora:¡¡¡d¦E ¢ ¢¢dt e Bk 1 Ck 2 ω R ω ¡ R¡ Bk 2 Ck 1 ω R¡ ¢Bk 2¡ Ck 1 ω R E Bk 1 Ck 2 ω ¢ R§ω R¢e (6.53)
¢¢2 B 6 P i¢B¢92 Estimación <strong>de</strong>l flujo <strong>de</strong> rotory en este caso los autovalores <strong>de</strong> la matriz vienen dados por:E ¢ Bk 1¢Ck 2 ω R 2BCk ¡ 1 k 2¡ 2Bk 2 ω R¡ B 2 k 2 2¡ ¢¨1¡ 2Ck 1¢C 2 k 2 1©ω 2 R (6.54)en don<strong>de</strong> se pue<strong>de</strong> apreciar que ahora existen dos grados <strong>de</strong> libertad que permiten situar<strong>de</strong> forma in<strong>de</strong>pendiente la parte real y la parte imaginaria <strong>de</strong> los dos autovalores conjugadosen cualquier posición <strong>de</strong>l plano complejo. Si se <strong>de</strong>sea situarlos en el eje real(autovalor ¡ ¡ P r ) los valores <strong>de</strong> k 1 y k 2 serán:k 1 ¡ ¡E ¢ P r¢k 2 ¡ ¡Bω R¢Ck 2 ω RB¢CEω R Cω R P rC 2 ω 2 RB 2 ¢Si se <strong>de</strong>sean situar en el plano complejo (autovalor ¡ ¡ P r ¡k 2 tendrán la siguiente expresión:(6.55)(6.56)P i ), los valores <strong>de</strong> k 1 yk 1 ¡ ¡E ¢ Ck 2 ω R¢BP rk 2 ¡¡ 2B 3 ω R¡ 2B 2 CEω R¡ 2B 2 Cω R P r¡ 2BC 2 ω 3 R¡2¨B 4 ¢2¨B 4 ¢C 4 ω 4 ¢R2B 4 C 2 ω 2 R P i ¢C 4 ω 4 ¢R2C 3 Eω 3 2C 3 ω 3 R P r2B 2 C 2 ω 2 R¡R©B 2 C 4 ω 4 R P i2B 2 C 2 ω 2 (6.57)R©en don<strong>de</strong> se observa que la implantación en tiempo real <strong>de</strong>l observador cuando se sitúanlos polos fuera <strong>de</strong>l eje real será problemática <strong>de</strong>bido a la complejidad <strong>de</strong>l cálculo <strong>de</strong> k 2 . 7A<strong>de</strong>más tal como se verá en la Sección 6.5.3 el situar a los polos <strong>de</strong>l observador sobre eleje real simplifica también enormemente los cálculos <strong>de</strong>l observador en tiempo discreto.Por tanto en este trabajo se van a situar siempre los polos <strong>de</strong>l observador en el eje real.A<strong>de</strong>más estos polos han <strong>de</strong> ser mucho más rápidos que los <strong>de</strong>l controlador para evitarque la dinámica <strong>de</strong>l observador interaccione con la <strong>de</strong>l controlador.6.5.2. Aplicación <strong>de</strong>l observadorEn la sección 6.5.1 se ha obtenido la ecuación dinámica <strong>de</strong> un observador <strong>de</strong> flujo <strong>de</strong>estator <strong>de</strong> or<strong>de</strong>n reducido:ddt¦ˆψ s Rdˆψ s Rq§¡¦D 00 D§Sq§¢ ¡¦i s Sd¦E ω Ri sω R E§¦ˆψ s Rdˆψ s Rq§¢K¦Cω R¦ˆψ s Rdˆψ s Rq§¡Cω R¦ψ s Rdψ s Rq§£¡(6.58)para po<strong>de</strong>r realimentar el valor real <strong>de</strong>l flujo, es necesario usar la dinámica <strong>de</strong> las corrientes.Aplicando (6.46) la ecuación anterior se reduce a:¡ Cω R B§¡ Cω R B§ddt¦ˆψ s Rdˆψ s Rq§¡¦D 00 D§Sq§¢ ¡¦i s Sd¦E ω Ri sω R E§¦ˆψ s Rdˆψ s Rq§¢Cω R¦ˆψ s Rdˆψ s Rq§¡K¦B¦B¡ K d dt¡ Cω R B§¦i s Sdi s Sq§¡0 A§¦A 0¦i s Sdi s Sq§¡0 F§¦F 0¦u s Sdu s Sq§£¡(6.59)7 Salvo que se calculen los valores <strong>de</strong> K previamente y luego se use alguna técnica <strong>de</strong> interpolación en laaplicación en tiempo real.
¢z ¢6.5 Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator 93sin embargo no es <strong>de</strong>seable realimentar la <strong>de</strong>rivada <strong>de</strong> las corrientes, puesto que la obtención<strong>de</strong> ésta es muy sensible al ruido <strong>de</strong> alta frecuencia. (Verghese y San<strong>de</strong>rs, 1988)propone evitar la medida <strong>de</strong> la <strong>de</strong>rivada <strong>de</strong> la corriente mediante un cambio <strong>de</strong> variable.Reor<strong>de</strong>nando la ecuación anterior se obtiene:ddt¦ˆψ s Rdˆψ s Rq§¢K d dt¦i s SdSq§¡¡i s ω R E§¢¦E ω R0 D§¢¦D 0¢K¦A 00 A§£¡Cω R¦i s Sdi s Sq§¢B¡ Cω R B§¡K¦¦ˆψ s RdK¦F 00 F§ˆψ s Rq§¢¦u s Sdu s Sq§(6.60)si se suma y se resta en la ecuación anterior el término:¦E ¡ ω Rω RE§¢Cω R¡ Cω R B§¢¡K¦i s Sdi s Sq§(6.61)se pue<strong>de</strong> <strong>de</strong>finir el siguiente cambio <strong>de</strong> variable:¡ z ψRs ¢Kı s S (6.62)K¦BLa ecuación <strong>de</strong>l observador en esta nueva variable se expresa:d¦Edt z ω ¡ R¡ω R E§¢¦E ¡ ω Rω¡R E§¢K¦BCω RCω ¡ R B§¢¡B Cω RK¦¡ Cω R B§£¡¦D 0z ¢ ¢0 D§K¦i s Sdi s Sq§¢0K¦AA§£¡ 0K¦F 00 F§¦i s Sdi s ¡¦u s SdSq§u s (6.63)Sq§k1 ¡k2si se K¡ eligek2 ¡ k1y se agrupan los términos <strong>de</strong> la ecuación anterior se obtiene comoecuación <strong>de</strong>l observador en tiempo continuo la siguiente expresión:ddt z ¡¦E ¢ Bk 1¢ω R¢Ck 2 ω R ¡Bk 2¡ Ck 1 ω R E ¢ Bk 1¢ω R¡ Bk 2¢Ck 1 ω RA¤ ¡£¢Ck 2 ω R§¦Fk 1 ¡B1Fk 2Fk 2 Fk 1§¦u s Sdu s Sq§¢¦B2 11 ¡B2 12¡£¢ ¤B2¤ ¡¥¢B2 11§¤¦i s Sdi s Sq§(6.64)B2 12siendo:B2 11 ¡ D ¢ ¡ A¡ E¢ k 1¢¡ 1¡ 2Ck 1 ¢ k 2 ω R¢B2 12 ¡ ¡ A¡ E¢ k 2¡ 2Bk 1 k 2¢¡ Ck 1¡ 1¢ k 1 ω R¡ Ck 2 2ω R (6.66)k 2 2¡ k 2 1¢ (6.65)B¡Conviene <strong>de</strong>stacar que en el cambio <strong>de</strong> variable realizado en (6.62) sólo es válido si laganancia K es constante, aunque esto no se menciona en (Verghese y San<strong>de</strong>rs, 1988). Sinembargo, según se ha visto en la sección 6.5.1, para mantener los polos in<strong>de</strong>pendientes<strong>de</strong> la velocidad se ha diseñado K como una función <strong>de</strong> la velocidad <strong>de</strong>l rotor (6.56).Por tanto, en los accionamientos en los que la aceleración sea elevada, la aplicación <strong>de</strong>lobservador propuesto será problemática, pudiendo incluso llegar a ser inestable, tal comose muestra en la Sección 6.5.5.
¨v k ¡¡¡¡¢¢¤ £¤¦¤94 Estimación <strong>de</strong>l flujo <strong>de</strong> rotor6.5.3. Implantación <strong>de</strong>l observador en tiempo discreto.El mo<strong>de</strong>lo en tiempo continuo obtenido en la sección anterior, propuesto en (Verghesey San<strong>de</strong>rs, 1988), pue<strong>de</strong> expresarse en tiempo discreto según:z¢ k ¡ 1 ¡ z¢ F k ¡ v¢ G k ¡ (6.67)k ¡ ¡¢ψ ¡ Kı s S¢k(6.68)z¢ ¨s R©kcon:u s Sdu s Sqi s Sd(6.69)Si se usa un retenedor <strong>de</strong> or<strong>de</strong>n cero para las medidas <strong>de</strong> tensiones y corrientes, lasmatrices <strong>de</strong>l mo<strong>de</strong>lo en tiempo discreto se pue<strong>de</strong>n calcular según:i s SqkF ¡ e AT s(6.70)siendo:G ¡0T se A s¤ B ds (6.71)B ¡¢B1¢ B2£ (6.72)Tal como se pue<strong>de</strong> apreciar en la ecuación (6.64) la matriz A es simétrica, es <strong>de</strong>cir:A ¡ αI ¢ βJ (6.73)por lo que se pue<strong>de</strong> <strong>de</strong>mostrar que (Arrowsmith y Place, 1982):F ¡ e αT s¦cosβT s ¡sinβT s(6.74)sinβT s cosβT s§A<strong>de</strong>más la matriz A es igual a la matriz A e <strong>de</strong>l observador (ver eq. 6.53 y 6.64) porlo que si se sustituyen k 1 y k 2 por las expresiones calculadas en (6.55-6.56) para situarlos autovalores <strong>de</strong> dicha matriz en¡ P r , se obtiene:¡PA¦¡ r¡0(6.75)0 P r§y por tanto F se reduce a:y la matriz G a:G ¡ e ¡que una vez resuelta la integral es:F ¡ e ¡ P r T s¤ I (6.76)P r T s¤ I0T se P rs¤ B ds (6.77)1 Pe r¤TB (6.78)P ¡ s© r¨1¡¡ GPor tanto la expresión final <strong>de</strong>l observador es la ecuación (6.67) junto con las expresiones<strong>de</strong> las matrices F (6.76) y G (6.78). Conviene <strong>de</strong>stacar que este observador estimael valor <strong>de</strong> z k por lo que para calcular el flujo es necesario <strong>de</strong>shacer el cambio <strong>de</strong> variablerealizado en (6.68):ψ s R©k ¡ ¡ z¢ k¡ ¡ Kı s S¢k(6.79)
¢¦ K¤¦B¦B¢¢D¡¡¡¢¡¡¡¢u f¤ ¡£¢£¥¤¤u i¤ ¡£¢¦¤£¥¤¤¦¤6.5 Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator 956.5.4. Implantación <strong>de</strong>l observador en tiempo discreto sin cambio <strong>de</strong>variableEn la implantación en tiempo discreto se pue<strong>de</strong> evitar la realización <strong>de</strong>l cambio <strong>de</strong>variable (6.68). En (Bottura et al., 1993) se realiza una discretización <strong>de</strong>l mo<strong>de</strong>lo completo<strong>de</strong>l motor en unos ejes que giran a la velocidad <strong>de</strong> sincronismo. Para po<strong>de</strong>r realizarla discretización <strong>de</strong>scomponen la matriz <strong>de</strong> estado A en una parte <strong>de</strong>pendiente <strong>de</strong> la velocidady otra in<strong>de</strong>pendiente, que la consi<strong>de</strong>ran como una entrada adicional, aplicándoleun retenedor <strong>de</strong> or<strong>de</strong>n cero. Basándose en este mo<strong>de</strong>lo en tiempo discreto se diseña unobservador <strong>de</strong> or<strong>de</strong>n reducido, mostrándose en el artículo mediante simulación el buencomportamiento <strong>de</strong> éste. En el presente trabajo se propone un método alternativo, consistenteen la discretización <strong>de</strong> las ecuaciones <strong>de</strong>l observador (6.49) y <strong>de</strong> la función <strong>de</strong>realimentación <strong>de</strong>l flujo (6.45), que se pue<strong>de</strong>n expresar, <strong>de</strong>spués <strong>de</strong> agrupar términos,como:A fddt¦ˆψ s Rdˆψ s Rq§¡¦E ¡ ω Rω RE§¢Cω R¡£¢ ¤¡ Cω R B§¢¡¦ˆψ s Rdˆψ s Rq§¢(6.80)K¦BB fψ s RdCω R¡ Cω R B §00 D §¡£¢ ¤ψ s Rqi s Sdi s Sq(6.81)ddt¦i s Sdi s Sq§¡A i¦A 0¤¡£¢0 A§¦i s Sdi s Sq§¢B iCω R F 0¡£¢ ¤¡ Cω R B 0 F§ψ s Rdψ s Rqu s Sd(6.82)u s SqSi se consi<strong>de</strong>ra la velocidad como un parámetro, ambas ecuaciones se pue<strong>de</strong>n consi<strong>de</strong>rarlineales e invariantes en el tiempo y por tanto se podrán expresar en tiempo discreto segúnlas ecuaciones:Rψ¢ˆsk1 ¡ F f ¡ ψ s R¢ k¡ ı s S¢k 1 ¡ F i ¡ ı s S¢kG f ¡ u f ¢k(6.83)G i ¡ u i ¢ k (6.84)Si se usa un retenedor <strong>de</strong> or<strong>de</strong>n cero para las entradas, las matrices <strong>de</strong> las ecuacionesen tiempo discreto vienen dadas por:F f ¡ e A f T s (6.85)G f ¡ e A f T s0T se A f s¤ B f ds (6.86)F i ¡ e A i T s (6.87)G i ¡ e A i T s0T se A i s¤ B i ds (6.88)
¢96 Estimación <strong>de</strong>l flujo <strong>de</strong> rotorTeniendo en cuenta que A f , <strong>de</strong>spués <strong>de</strong> sustituir K por los valores expresados en (6.55-6.56) para situar sus autovalores en¡ P r , es igual a:A¦¡ P r 0f¡ 0¡ (6.89)P r§su exponencial, al ser A f diagonal, se reduce a:<strong>de</strong> la misma manera, F i es igual a:PF f e r T s¤ I (6.90)¡ ¡F i e A T sI (6.91)¤ ¡y las matrices G f y G i , una vez resueltas las integrales son iguales a:G f ¡G i ¡11A¨e A T s¡¡ P r¨e ¡ P r T s¡1© ¤ B f (6.92)¤ B i (6.93)A partir <strong>de</strong> la expresión en tiempo discreto <strong>de</strong> la dinámica <strong>de</strong> las corrientes (6.84),teniendo en cuenta (6.47), (6.91) y (6.93), se pue<strong>de</strong> calcular el término <strong>de</strong> realimentación<strong>de</strong>l flujo f1©ψ s R¢ , que vendrá dado por:¡¡ f ¡ ψ s R¢ ¢ k ¡Ae A T s¡ 1 I¤ ¡ ı s S¢k 1¡ ¤De la misma forma, a partir <strong>de</strong> (6.83), teniendo en cuenta (6.47), (6.90) y (6.92), seobtiene la ecuación <strong>de</strong>l observador en tiempo discreto:Rψ¢ˆsk1 ¡ e ¡ P r T s¤ IˆsRψ¢ kPe r T ¡ s¡ ¡¢ 1Pre A T s¡ ı s S¢ k¡ ¡ F ¤ I¡ v s S¢k(6.94)Nótese que estas ecuaciones permiten calcular el flujo en el instante k 1 a partir <strong>de</strong>la corriente y el flujo estimado en el instante k y <strong>de</strong> la corriente en el instante k ¢1, lacual estará ya disponible en el momento <strong>de</strong> calcular el flujo.¢6.5.5. Resultados <strong>de</strong> simulaciónK¡ f ¡ ψ s R¢ ¢ kD¤ I¡ ı s S¢ k¡ (6.95)Para evaluar las prestaciones <strong>de</strong>l observador <strong>de</strong> or<strong>de</strong>n reducido se ha simulado el observadorjunto con el controlador Lyapunov-Integral <strong>de</strong>sarrollado en la Sección 4.3. Lassimulaciones se han realizado sobre el mismo motor <strong>de</strong> 250 W usado en la Sección 4.4.2y bajo las mismas condiciones. Tanto el observador como el controlador se han implementadoen tiempo discreto con un periodo <strong>de</strong> muestreo <strong>de</strong> T s ¡ 1 ms. Las ganancias <strong>de</strong>lcontrolador Lyapunov-Integral se han elegido: k 1 ¡ 100, I 1 ¡ 4, k 2 ¡ 50 y I 2 ¡ 8 y elpolo <strong>de</strong>l observador se ha situado en P r ¡ ¡ 250.Se han evaluado las dos versiones <strong>de</strong>l observador propuestas:1. realimentación <strong>de</strong>l flujo mediante el cambio <strong>de</strong> variable propuesto en (Verghese ySan<strong>de</strong>rs, 1988), mostrado en la Sección 6.5.2 y expresado en tiempo discreto segúnse ha mostrado en la Sección 6.5.3
6.5 Observador <strong>de</strong> or<strong>de</strong>n reducido en ejes <strong>de</strong> estator 97ˆsRψ (—) y ψ s R (- -) 832.521.510.500100012345ω R (—) y ω Rr (- -)675000-500-1000012345678Figura 6.8: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador concambio <strong>de</strong> variable.2. realimentación <strong>de</strong>l flujo en tiempo discreto sin cambio <strong>de</strong> variable, según se proponeen la sección 6.5.4.En la figura 6.8 se muestra una simulación con la primera versión <strong>de</strong>l observador. Esteobservador es inestable en el arranque, por lo que es necesario usar otro observador endicho periodo o arrancar la máquina sin controlar. En este caso se ha optado por la primeraalternativa, usándose la segunda versión <strong>de</strong>l observador durante los primeros 2 s. Des<strong>de</strong>t ¡ 3 s hasta t ¡ 6 s se realiza una inversión <strong>de</strong>l sentido <strong>de</strong> giro con baja aceleración,durante la cual el observador se comporta a<strong>de</strong>cuadamente, aunque en el paso por cero <strong>de</strong>la velocidad se produce un error <strong>de</strong> estimación apreciable. Des<strong>de</strong> t ¡ 8 s hasta t ¡ 8¢ 5 s sevuelve a cambiar el sentido <strong>de</strong> giro, pero esta vez con una aceleración gran<strong>de</strong>, pudiéndoseapreciar que el observador se vuelve inestable en el paso por cero <strong>de</strong> la velocidad. Tanto elerror <strong>de</strong> estimación como la inestabilidad se producen en el paso por cero <strong>de</strong> la velocidadporque es en ese punto don<strong>de</strong> la <strong>de</strong>rivada <strong>de</strong> la matriz <strong>de</strong> ganancias <strong>de</strong>l observador Kpresenta su máximo, con lo que el error cometido al <strong>de</strong>spreciar la <strong>de</strong>rivada <strong>de</strong> K en laecuación <strong>de</strong>l observador con cambio <strong>de</strong> variable (6.63) es consi<strong>de</strong>rable.Las oscilaciones que se producen en el observador durante el régimen permanente sepue<strong>de</strong>n eliminar aumentando la separación entre las constantes <strong>de</strong> tiempo <strong>de</strong>l observadory las <strong>de</strong>l controlador. En la figura 6.9 se muestra una simulación realizada en las mismascondiciones que las <strong>de</strong> la figura 6.8, manteniendo el polo <strong>de</strong>l observador en P r ¡ ¡ 250,pero situando la ganancia k 1 en 50. Como se pue<strong>de</strong> apreciar el sistema ahora no oscila,aunque <strong>de</strong>bido a la menor ganancia <strong>de</strong>l controlador <strong>de</strong> flujo presenta un pequeño error enrégimen permanente. A<strong>de</strong>más el controlador sigue siendo inestable en el paso por cero<strong>de</strong> la velocidad cuando la aceleración es gran<strong>de</strong>.En la figura 6.10 se muestran los resultados obtenidos con el observador implantado
98 Estimación <strong>de</strong>l flujo <strong>de</strong> rotorˆsRψ (—) y ψ s R (- -) 832.521.510.500100012345ω R (—) y ω Rr (- -)675000-500-1000012345678Figura 6.9: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador concambio <strong>de</strong> variable.sin cambio <strong>de</strong> variable, según se ha mostrado en la sección 6.5.4. La simulación se harealizado en las mismas condiciones que las <strong>de</strong> la figura 6.8, salvo que <strong>de</strong>s<strong>de</strong> ¡ t 8 shasta ¡ 9¢ t 5 s la resistencia se ha incrementado <strong>de</strong>s<strong>de</strong> su valor nominal hasta un 150 %<strong>de</strong> dicho valor. Como se pue<strong>de</strong> apreciar el observador implantado sin cambio <strong>de</strong> variablees estable tanto en el arranque como en los transitorios con alta aceleración, aunque dadoque la discretización realizada sólo es válida si la velocidad pue<strong>de</strong> consi<strong>de</strong>rarse constantedurante todo el periodo <strong>de</strong> muestreo, durante los transitorios se produce un pequeño error<strong>de</strong> estimación. A<strong>de</strong>más cuando se produce un transitorio <strong>de</strong> velocidad en presencia <strong>de</strong>un error en el valor <strong>de</strong> la resistencia <strong>de</strong> rotor, el error <strong>de</strong> estimación en el paso por cero<strong>de</strong> la velocidad aumenta, pudiendo llegar el sistema a ser inestable si el error en R R eselevado. 8 Sin embargo, según se pue<strong>de</strong> apreciar en la figura, el error <strong>de</strong> estimación enrégimen permanente no se ve afectado en gran medida por el error en la resistencia <strong>de</strong>rotor.6.6. ConclusionesEn este capítulo se han estudiado tres alternativas para obtener el flujo <strong>de</strong> rotor <strong>de</strong>la máquina <strong>de</strong> inducción. En primer lugar se ha mostrado un estimador en lazo abierto,que si bien presenta como principal ventaja su simplicidad, tiene como inconvenientesuna limitada velocidad <strong>de</strong> convergencia y una gran sensibilidad a los parámetros <strong>de</strong> lamáquina. Para mejorar el comportamiento cuando varía la resistencia <strong>de</strong> rotor, se hapropuesto el uso <strong>de</strong> un estimador <strong>de</strong> resistencia <strong>de</strong> rotor, obteniéndose una mejora no-8 Se ha comprobado mediante simulación que en este caso si ˆR R es mayor <strong>de</strong> un 200 % o menor <strong>de</strong> un 90 %<strong>de</strong> su valor nominal, el controlador es inestable en los cambios <strong>de</strong> sentido <strong>de</strong> giro con aceleración gran<strong>de</strong>.
6.6 Conclusiones 991.61.20.80.40024ˆs ψ R (—) y ψ s R (- -) 1468ω R (—) y ω Rr (- -)10124002000-200-40002468101214Figura 6.10: Evolución <strong>de</strong>l flujo <strong>de</strong> rotor estimado y <strong>de</strong> la velocidad. Observador sincambio <strong>de</strong> variable.table en el comportamiento <strong>de</strong>l estimador. A<strong>de</strong>más, esta es la primera vez que se simuladicho estimador en lazo cerrado.En segundo lugar se ha mostrado un diseño conjunto <strong>de</strong> un controlador Lyapu-nov-Integral junto con un estimador <strong>de</strong> flujo <strong>de</strong> rotor en lazo abierto, en el que gracias al controladorse consigue que una función <strong>de</strong> Lyapunov <strong>de</strong> los errores <strong>de</strong> seguimiento y susintegrales, junto con el error <strong>de</strong> estimación, tiendan a cero con una dinámica preestablecida.Sin embargo se ha mostrado mediante simulación que las prestaciones <strong>de</strong> este controladorson peores que las obtenidas cuando se diseña el controlador Lyapunov-Integralin<strong>de</strong>pendientemente <strong>de</strong>l estimador <strong>de</strong> flujo <strong>de</strong> rotor.En tercer lugar se ha estudiado un observador <strong>de</strong> flujo <strong>de</strong> rotor <strong>de</strong> or<strong>de</strong>n reducido,mostrándose que la realimentación <strong>de</strong>l observador requiere el cálculo <strong>de</strong> la <strong>de</strong>rivada <strong>de</strong> lacorriente o realizar un cambio <strong>de</strong> variable, propuesto en (Verghese y San<strong>de</strong>rs, 1988), que<strong>de</strong>pen<strong>de</strong> <strong>de</strong> la velocidad <strong>de</strong> giro <strong>de</strong> la máquina. Esta <strong>de</strong>pen<strong>de</strong>ncia <strong>de</strong> la velocidad, haceque el observador sea inestable cuando la máquina se somete a transitorios <strong>de</strong> velocidadcon aceleración gran<strong>de</strong>. Para evitar este problema, en este trabajo se ha realizado unaimplantación en tiempo discreto novedosa, que no necesita realizar el cambio <strong>de</strong> variablemencionado anteriormente y que funciona a<strong>de</strong>cuadamente cuando existen transitorios <strong>de</strong>velocidad con aceleración gran<strong>de</strong>.
100 Estimación <strong>de</strong>l flujo <strong>de</strong> rotor
Capítulo 7Plataforma experimental7.1. IntroducciónEn los capítulos previos se han <strong>de</strong>sarrollado una serie <strong>de</strong> controladores y <strong>de</strong> estimadores<strong>de</strong> flujo para el motor <strong>de</strong> inducción, validándose sus prestaciones mediante simulación.Aunque las simulaciones realizadas han permitido evaluar los controladores yestimadores en condiciones i<strong>de</strong>ales, es necesario comprobar su aplicación en un banco<strong>de</strong> ensayos real, don<strong>de</strong> intervienen ruidos en las medidas, errores en los parámetros,retrasos, saturaciones, etc.En este capítulo se <strong>de</strong>scribe el banco <strong>de</strong> ensayos <strong>de</strong>l Laboratorio <strong>de</strong> Acciona-mientosEléctricos <strong>de</strong> la Universidad Pontificia Comillas utilizado para la validación experimental,haciendo especial énfasis en los sistemas <strong>de</strong>l banco <strong>de</strong>sarrollados por el autor.En primer lugar se <strong>de</strong>scribe un diagrama <strong>de</strong> bloques general <strong>de</strong>l banco <strong>de</strong> ensayosutilizado. A continuación se muestra un circuito basado en FPGA 1 usado para controlarun inversor trifásico mediante modulación vectorial. Seguidamente se <strong>de</strong>scribe el circuito<strong>de</strong> interfaz entre el or<strong>de</strong>nador y el enco<strong>de</strong>r incremental usado para la medida <strong>de</strong> la velocidad,que también está basado en una FPGA. Por último se muestra el programa <strong>de</strong> control<strong>de</strong>sarrollado junto con el sistema operativo <strong>de</strong> tiempo real usado para su implantación.7.2. Descripción <strong>de</strong>l banco <strong>de</strong> ensayosEn la figura 7.1 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong>l banco <strong>de</strong> ensayos. El bancoestá compuesto por una máquina <strong>de</strong> inducción <strong>de</strong> 250 W, acoplada por un extremo <strong>de</strong> sueje a una máquina <strong>de</strong> corriente continua <strong>de</strong> 550 W que actúa como freno y por el otroa un enco<strong>de</strong>r incremental para la medida <strong>de</strong> la velocidad. La máquina <strong>de</strong> inducción sealimenta a través <strong>de</strong> un inversor trifásico SKiiP 132GD120-318CTV (Semikron, 1999)<strong>de</strong> la firma Semikron, cuyo circuito <strong>de</strong> continua se alimenta a través <strong>de</strong> un rectificadortrifásico SKD160-12 también <strong>de</strong> la firma Semikron. La salida <strong>de</strong>l rectificador se filtra conun banco <strong>de</strong> con<strong>de</strong>nsadores <strong>de</strong> 3.300 µF <strong>de</strong> capacidad.Para alimentar la excitación <strong>de</strong> la máquina <strong>de</strong> continua se usa una fuente <strong>de</strong> corrientecontinua HP6655A <strong>de</strong> 120 V, 4 A. El inducido se conecta a una resistencia variable <strong>de</strong> 2501 Field Programable Gate Array.
102 Plataforma experimental120 VMáquina <strong>de</strong>Continua380 VINVMáquina <strong>de</strong>InducciónInterfazPWM+Enco<strong>de</strong>rEnco<strong>de</strong>rTarjetaA/Di Ri SRT−LinuxBus ISAFigura 7.1: Diagrama <strong>de</strong> bloques <strong>de</strong>l banco <strong>de</strong> ensayosΩ que permite variar la característica <strong>de</strong>l par <strong>de</strong> carga aplicado a la máquina <strong>de</strong> inducción.Nótese que este par <strong>de</strong> carga será proporcional a la velocidad <strong>de</strong> giro, no siendo posiblecon este esquema ensayar la máquina <strong>de</strong> inducción con un par constante o con un par<strong>de</strong>pendiente <strong>de</strong>l cuadrado <strong>de</strong> la velocidad.El sistema <strong>de</strong> control se ha implantado en un PC compatible con un procesador Pentiuma 200 MHz y 64 Mb <strong>de</strong> memoria RAM. Para po<strong>de</strong>r controlar el sistema se hanañadido dos tarjetas al bus ISA <strong>de</strong>l PC (Shanley y An<strong>de</strong>rson, 1995). La primera, <strong>de</strong>signadaen el diagrama como “Tarjeta A/D”, es una tarjeta <strong>de</strong> adquisición <strong>de</strong> datos DAS-1400<strong>de</strong> la firma Keithley Metrabyte (Keithley, 1993) que se usa para la medida <strong>de</strong> las corrientes.Como se pue<strong>de</strong> apreciar en la figura 7.1 se mi<strong>de</strong>n las corrientes <strong>de</strong> las fases R y S,usándose para ello dos sondas <strong>de</strong> corriente basadas en efecto Hall HTP100S <strong>de</strong> la firmaTelcon Technology. La salida <strong>de</strong> ambas sondas es una corriente 5 veces menor que la <strong>de</strong>lprimario. 2 Dicha corriente se hace pasar por una resistencia <strong>de</strong> 5 Ω, obteniéndose unaganancia <strong>de</strong> las sondas <strong>de</strong> 1 V/A.La segunda tarjeta usada en el sistema, i<strong>de</strong>ntificada en el diagrama <strong>de</strong> bloques como“Interfaz PWM+Enco<strong>de</strong>r”, es una tarjeta <strong>de</strong>sarrollada por el autor que permite controlar2 Las sondas tienen una relación entre la corriente <strong>de</strong>l primario y la salida <strong>de</strong> 1:100. Como esta relación es<strong>de</strong>masiado elevada para esta aplicación se ha optado por dar 20 vueltas al primario, obteniéndose una relación20:100.
7.3 <strong>Control</strong> <strong>de</strong>l inversor mediante modulación vectorial 103los disparos <strong>de</strong>l inversor trifásico y contar los pulsos <strong>de</strong>l enco<strong>de</strong>r incremental, <strong>de</strong>tectándosea<strong>de</strong>más el sentido <strong>de</strong> giro <strong>de</strong> la máquina. Esta tarjeta está basada en una FPGAXC4010 (Xilinx, 1999) <strong>de</strong> la firma Xilinx. Tanto la conexión con el inversor como con elenco<strong>de</strong>r incremental están aisladas galvánicamente.Por último conviene <strong>de</strong>stacar que el programa <strong>de</strong> control se ha implantado en tiemporeal mediante el uso <strong>de</strong>l sistema operativo RTLinux (Barabanov, 1997), que es unavariante <strong>de</strong>l sistema operativo Linux que permite ejecutar ciertas tareas en tiempo real.En las secciones siguientes se discuten en mayor <strong>de</strong>talle tanto la tarjeta <strong>de</strong> interfazcon el inversor y con el enco<strong>de</strong>r como la implantación <strong>de</strong>l programa <strong>de</strong> control en tiemporeal usando el sistema operativo RTLinux.7.3. <strong>Control</strong> <strong>de</strong>l inversor mediante modulación vectorialPara po<strong>de</strong>r aplicar los algoritmos <strong>de</strong> control <strong>de</strong>sarrollados en esta tesis es necesariodisponer <strong>de</strong> una fuente <strong>de</strong> tensión controlable <strong>de</strong> forma dinámica y precisa. La modulaciónmediante vector espacial (Holtz, 1994) permite situar el vector <strong>de</strong> tensión en cadainstante en cualquier posición <strong>de</strong>l plano d-q. Esto hace que esta técnica sea la más intuitivapara aplicaciones <strong>de</strong> control vectorial o <strong>de</strong> dispositivos FACTS (García González yGarcía Cerrada, 1998).7.3.1. Tensiones generadas por un inversor trifásico en ejes d-q.En la Figura 7.2 se muestra un esquema simplificado <strong>de</strong> un inversor trifásico. Endicho inversor existen limitaciones en cuanto al estado <strong>de</strong> los interruptores: para evitarun cortocircuito no pue<strong>de</strong>n estar cerrados al mismo tiempo los dos interruptores <strong>de</strong> unamisma rama. Tampoco es conveniente <strong>de</strong>jar los dos interruptores <strong>de</strong> una rama abiertosya que la tensión en la fase correspondiente <strong>de</strong> la carga estará in<strong>de</strong>finida. Debido a esto,existen tan solo ocho estados (modos) posibles <strong>de</strong>l inversor y cada estado se pue<strong>de</strong> i<strong>de</strong>ntificarsabiendo la situación <strong>de</strong> un interruptor <strong>de</strong> cada rama. En la Tabla 7.1 se muestranlos estados <strong>de</strong> tres interruptores (1, 3 y 5, Fig.7.2) para cada uno <strong>de</strong> los posibles modos<strong>de</strong>l inversor.Para cada uno <strong>de</strong> estos modos se obtiene una tensión <strong>de</strong> salida en cada una <strong>de</strong> lasramas <strong>de</strong>l inversor. Si se alimenta con el inversor una carga equilibrada conectada enestrella, tal como se muestra en la Figura 7.3(a), las tensiones obtenidas en cada fase<strong>de</strong> la carga serán las mostradas en la Tabla 7.2. Para una carga equilibrada conectada enV C143652U V WFigura 7.2: Inversor trifásico.
104 Plataforma experimentalInt.\Modo 1 2 3 4 5 6 7 81 On On On Off Off Off On Off3 Off Off On On On Off On Off5 Off On Off On Off On On OffCuadro 7.1: Modos <strong>de</strong>l inversor.V x \Modo 1 2 3 4 5 6 7 82V R 3 V C1V S ¡V T ¡3 V C ¡13 V C13 V C23 V C13 V C ¡u d23V C16 V Cu q 0 ¡12V C13 V C ¡13 V C23 V C23 V C ¡13 V C13 V C ¡13 V ¡ C23 V ¡ C13 V C1V 6¡2C 3 V ¡1C V 6¡ C12 V C 012 V ¡ C113 V C 0 03 V C 0 023 V C 0 016 V C 0 01V 2C 0 0Cuadro 7.2: Tensiones <strong>de</strong> fase y en ejes d-q para una carga conectada en estrella.V x \Modo 1 2 3 4 5 6 7 8V R V C V C 0 ¡ V C ¡V S 0 ¡ V C V C 0 V C ¡V T ¡u d62 V Cu q22V C ¡6¡V C 0 0 0V C 0 0V C 0 V C V C 0 V C 0 02 V C ¡ 022 V C 2V C ¡62 V C ¡22 V C6¡2 V C 0 0 022 V C 2V C 0 0Cuadro 7.3: Tensiones <strong>de</strong> fase y en ejes d-q para una carga conectada en triángulo.triángulo, según el esquema mostrado en la Figura 7.3(b), las tensiones por fase en lacarga se muestran en la Tabla 7.3.Si a las tensiones trifásicas <strong>de</strong> arrollamiento se les aplica una transformada <strong>de</strong> Parkinvariante en potencia, con el eje d coinci<strong>de</strong>nte con la fase R, se obtienen las tensionesen ejes d-q mostradas en las dos últimas filas <strong>de</strong> las tablas 7.2 y 7.3. La transformaciónaplicada en ambos casos se ha <strong>de</strong>sarrollado en la sección A.1 y viene dada por:.R. T S .UVW.TS..RUVW(a) Estrella.(b) Triángulo.Figura 7.3: Conexión <strong>de</strong> la carga al inversor.
¡¢¡¢¡¢7.3 <strong>Control</strong> <strong>de</strong>l inversor mediante modulación vectorial 105d1d2 1267uS35q67uS3q48458(a) Estrella.(b) Triángulo.Figura 7.4: Tensiones generadas en ejes d-q.u o£¥¤u du q¦ ¡2¢31212121 cos 2π 3cos 4π 30 sin 2π 3sin 4π 3£¥¤¦ ¤U R£¥¤U S ¦ (7.1)U TComo se pue<strong>de</strong> apreciar la componente u o es cero en todos los modos y por ello no se haindicado su valor en las tablas 7.2 y 7.3En las Figuras 7.4(a) y 7.4(b) se representan las tensiones en ejes d-q para cada modo<strong>de</strong>l inversor. Cada punto representa el vector espacial <strong>de</strong> tensión generado en el modocorrespondiente y las lineas que los unen representan los modos adyacentes 3 . En elmodo 8 la tensión aplicada por el inversor a la carga es cero, al igual que en el modo7, por lo que a ambos se les <strong>de</strong>nomina modos inactivos. Al resto <strong>de</strong> modos (1–6) se les<strong>de</strong>nomina modos activos. El modo 8 se ha dibujado lejos <strong>de</strong>l origen para po<strong>de</strong>r distinguirqué modos son adyacentes al modo 7 y cuales lo son al 8. Nótese que ambas figuras sehan dibujado con la misma escala y que por tanto las tensiones producidas en la cargaconectada en estrella son 3 veces menores que las producidas en la carga conectada entriángulo.7.3.2. Generación <strong>de</strong> un vector espacial <strong>de</strong> tensión arbitrario.Para generar un vector <strong>de</strong> tensión cualquiera (Por ejemplo u S en la Fig. 7.4) es necesarioconmutar el inversor entre varios modos durante un periodo <strong>de</strong> muestreo T s , <strong>de</strong>forma que la media <strong>de</strong>l vector <strong>de</strong> tensión en ejes d-q generado durante T s coincida conel valor <strong>de</strong>l vector que se <strong>de</strong>sea generar. Sin embargo esta premisa da lugar a infinitascombinaciones <strong>de</strong> modos <strong>de</strong>l inversor durante T s . En (Bellini et al., 1983) se presenta unmétodo que permite minimizar el número <strong>de</strong> conmutaciones durante T s : como cualquiervector que se <strong>de</strong>see generar estará siempre situado entre dos modos activos adyacentes ay b (1 y 3 en el ejemplo <strong>de</strong> la Fig. 7.4) 4 , se pue<strong>de</strong> generar el vector u S aplicando durante3 Se <strong>de</strong>nominan modos adyacentes aquellos en los que sólo es necesario el cambio <strong>de</strong> estado <strong>de</strong> una ramapara pasar <strong>de</strong> un modo al otro (Bellini et al., 1983).4 Se dice entonces que el vector u S está en la región Rab (R13 en el ejemplo <strong>de</strong> la Fig. 7.4)
T s ¤u S ¡ t a ¤106 Plataforma experimentalun tiempo t a el modo a (con lo que se aplica la tensión u Sa a la carga) y durante un tiempot b el modo b (u Sb ), <strong>de</strong> forma que se cumpla:u Sa¢t b ¤ u Sb (7.2)El tiempo t a¢t b será siempre menor o igual que T s , por lo que el tiempo sobrante (T s¡t a¡ t b ) se reparte entre los dos modos inactivos. En el apéndice D se muestran los cálculos<strong>de</strong>tallados para los tiempos <strong>de</strong> conmutación <strong>de</strong>l inversor en función <strong>de</strong> la región en la quese encuentre el vector u S , así como un algoritmo para <strong>de</strong>terminar fácilmente en cual <strong>de</strong>las seis regiones posibles se encuentra dicho vector u S .Con objeto <strong>de</strong> minimizar el número <strong>de</strong> conmutaciones <strong>de</strong> los interruptores es necesarioque las transiciones se realicen siempre entre modos adyacentes. A<strong>de</strong>más es convenienteevitar las transiciones al inicio <strong>de</strong>l periodo <strong>de</strong> muestreo para facilitar la adquisición<strong>de</strong> datos sin necesidad <strong>de</strong> complejos filtros para eliminar los ruidos <strong>de</strong> conmutación. Estaúltima condición hace necesario empezar y terminar cada periodo <strong>de</strong> muestreo con unmodo inactivo. Como se pue<strong>de</strong> apreciar en la Figura 7.4 en cada región <strong>de</strong>l inversor cadauno <strong>de</strong> los modos activos es adyacente a sólo uno <strong>de</strong> los modos inactivos. Por ejemplo enla región R13 el modo activo 1 es adyacente al modo inactivo 8 y el 3 lo es al 7. Por tantopara minimizar el número <strong>de</strong> conmutaciones <strong>de</strong> los semiconductores, la secuencia <strong>de</strong>modos ha <strong>de</strong> ser distinta en cada periodo <strong>de</strong> muestreo. Siguiendo con el ejemplo anterior,si el vector u S está situado en la región R13, y el periodo anterior terminó con el inversorsituado en el modo 7, la secuencia <strong>de</strong> modos para el periodo actual será 7-3-1-8 y la <strong>de</strong>lsiguiente será por tanto la contraria, ya que se iniciará el periodo con el modo 8: 8-1-3-7.7.4. Circuito coprocesador para la temporización <strong>de</strong>l inversor.Según se ha expuesto anteriormente, para que el inversor aplique en cada periodo <strong>de</strong>muestreo la tensión correcta es necesario controlar las tres ramas <strong>de</strong>l inversor para queéste permanezca durante un tiempo t a en el modo a, durante t b en el modo b y el resto <strong>de</strong>ltiempo en los dos modos inactivos 7 y 8. Para conseguir esto es necesario controlar <strong>de</strong>forma precisa el tiempo en que conmutan cada una <strong>de</strong> las tres ramas. Este hecho, unido ala alta frecuencia <strong>de</strong> muestreo, obliga al uso <strong>de</strong> un hardware específico. Dicho hardwarepue<strong>de</strong> estar:integrado en el propio microprocesador.construido a partir <strong>de</strong> temporizadores discretos LSI.integrado <strong>de</strong>ntro <strong>de</strong> un dispositivo <strong>de</strong> lógica programable.El primer caso es cada vez mas frecuente en la actualidad, ya que dado el auge <strong>de</strong> lasaplicaciones <strong>de</strong> control PWM, muchos fabricantes incluyen unida<strong>de</strong>s para generación <strong>de</strong>PWM trifásico en sus circuitos. Ejemplos <strong>de</strong> este tipo <strong>de</strong> microprocesadores son el InfineonC166 (Infineon Technologies, 1999) o el Texas Instruments TMS320F240 (TexasInstruments, 1998). Sin embargo en ciertos casos los dispositivos anteriores no tienen lapotencia <strong>de</strong> cálculo necesaria para la aplicación o son <strong>de</strong>masiado caros 5 y poco flexibles5 Aunque el precio <strong>de</strong>l procesador suele ser muy bajo, el coste <strong>de</strong>l sistema <strong>de</strong> <strong>de</strong>sarrollo suele ser muyelevado, lo cual hace que no se justifique su adquisición para un laboratorio <strong>de</strong> investigación.
0/.-,+*)('&%$#"!21437.4 Circuito coprocesador para la temporización <strong>de</strong>l inversor. 107D[15:0]D[7:0]D[10:8]DEDEDEDED QERegistroPredivisionDEQRegistroQRegistroQRegistroQRegistroQRegistroRegistro <strong>de</strong> controlts’tu’tv’tw’¨¡¨ §¡§¡§16¦¡¦ ¥¡¥¡¥16¤¡¤ £¡£¡£16¢¡¢ ¡168DEDEDEDEPredivisorQRegistrotsQRegistrotuQRegistrotvQRegistrotwCuenta¡ ©¡©¡©16¡ ¡¡16¡ ¡¡16¡ ¡¡16Reset ContadorQContador5¡5 6¡66¡6 5¡516AB Comparador =AB Comparador =AB Comparador =AB Comparador =InterrT QT QT QINTSW1SW3SW5A[3:0]SEL[3:2]DecodificadorDireccionesFigura 7.5: Diagrama <strong>de</strong> bloques <strong>de</strong>l circuito.para un entorno <strong>de</strong> investigación. En estos casos pue<strong>de</strong> ser mas apropiado el uso <strong>de</strong> procesadores<strong>de</strong> propósito general, como por ejemplo un Pentium o un TMS320C30, lo queobligará al uso <strong>de</strong> hardware específico para la generación <strong>de</strong> las señales PWM. En estasituación el uso <strong>de</strong> lógica programable tiene como ventajas principales sobre el uso <strong>de</strong>componentes discretos un ahorro consi<strong>de</strong>rable <strong>de</strong> espacio en la placa <strong>de</strong> circuito impresoy una mayor flexibilidad para realizar modificaciones en el circuito, imprescindibles enun entorno <strong>de</strong> investigación.7.4.1. Diagrama <strong>de</strong> bloques <strong>de</strong>l circuitoEn la figura 7.5 se muestra un diagrama <strong>de</strong> bloques simplificado <strong>de</strong>l circuito <strong>de</strong> generación<strong>de</strong> PWM. Dicho circuito consta <strong>de</strong> un contador <strong>de</strong> 16 bits y cuatro comparadoresasociados a cuatro registros, también <strong>de</strong> 16 bits, en los que se almacenan el periodo <strong>de</strong>muestreo t s y los tiempos en los que <strong>de</strong>be cambiar <strong>de</strong> estado cada rama <strong>de</strong>l inversor: t u , t vy t w . Cuando el tiempo almacenado en alguno <strong>de</strong> estos registros coinci<strong>de</strong> con el tiempoalmacenado en el contador, el pulso originado en la salida <strong>de</strong>l comparador hace cambiar<strong>de</strong> estado el flip-flop tipo T y por tanto también cambiará el estado <strong>de</strong> la rama correspondiente(SW1, SW3 o SW5). 6 Cuando el contador llega al valor almacenado en elregistro t s se genera un pulso <strong>de</strong> interrupción al microprocesador, se reinicia el contadory se cargan los valores <strong>de</strong> los registros t s, t u, t v y t w en los registros t s , t u , t v y t w . Esta6 Para simplificar el esquema sólo se han mostrado las salidas <strong>de</strong> los interruptores superiores <strong>de</strong> cada rama. Elestado <strong>de</strong> los interruptores inferiores es simplemente el complementario <strong>de</strong> los superiores, ya que al incorporarel driver <strong>de</strong>l inversor utilizado su propio circuito <strong>de</strong> generación <strong>de</strong> tiempos muertos, no es necesario generarlosen este circuito.
108 Plataforma experimentaltécnica <strong>de</strong> doble buffer permite que el procesador pueda escribir los tiempos <strong>de</strong>l periodo<strong>de</strong> muestreo k 1 durante todo el periodo k sin perturbar el funcionamiento <strong>de</strong>l sistema.A<strong>de</strong>más la interrupción generada permite al microprocesador iniciar la rutina <strong>de</strong> control¢que medirá las variables <strong>de</strong>l sistema, calculará los nuevos tiempos y los escribirá en elcircuito; para lo que dispone <strong>de</strong> todo el periodo <strong>de</strong> muestreo k. La tensión calculada nose aplicará hasta el periodo k 1 y por tanto es necesario compensar este retraso en elcontrolador si la frecuencia fundamental es alta. En el apéndice E se muestra el diseño <strong>de</strong>¢los controladores <strong>de</strong> corriente para tener en cuenta este retraso.El resto <strong>de</strong> componentes <strong>de</strong>l sistema son un predivisor <strong>de</strong> 8 bits, útil en caso <strong>de</strong> quela frecuencia <strong>de</strong>l reloj <strong>de</strong> entrada al circuito sea elevada y se <strong>de</strong>see generar una señalPWM con una baja frecuencia <strong>de</strong> conmutación 7 y un registro <strong>de</strong> 8 bits para controlar elfuncionamiento <strong>de</strong>l circuito. Mediante estos bits <strong>de</strong> control se pue<strong>de</strong> arrancar o parar lamodulación, habilitar la generación <strong>de</strong> interrupciones o hacer que al parar la modulaciónse abran todos los interruptores o se sitúe el inversor en el modo inactivo 7, útil estoúltimo para aplicaciones FACTS.Conviene <strong>de</strong>stacar que la tarjeta <strong>de</strong> modulación PWM <strong>de</strong>sarrollada en esta tesis ha sidousada por los <strong>de</strong>más integrantes <strong>de</strong>l Laboratorio <strong>de</strong> accionamientos eléctricos (Robertson,1999), (García González, 2000) y (Fernán<strong>de</strong>z Bernal, 2000).7.5. Medida <strong>de</strong> la velocidad con un enco<strong>de</strong>r incrementalLas estrategias <strong>de</strong> control presentadas necesitan conocer la velocidad <strong>de</strong> giro <strong>de</strong>l motorcon suficiente precisión. La medida <strong>de</strong> ésta con una dinamo tacométrica es muy inexactay ruidosa. A<strong>de</strong>más la dinamo tacométrica, al ser una máquina <strong>de</strong> continua, precisamantenimiento <strong>de</strong> sus escobillas, por lo que en un accionamiento con un motor <strong>de</strong>inducción no tiene mucho sentido el uso <strong>de</strong> este dispositivo si queremos conseguir unaccionamiento “sin escobillas”. Por todo lo anterior el método más usado para medir lavelocidad en accionamientos con motores <strong>de</strong> inducción es mediante el uso <strong>de</strong> un enco<strong>de</strong>rincremental. Así se obtienen medidas <strong>de</strong> la velocidad más precisas que con una dinamotacométrica, presentando la ventaja adicional <strong>de</strong> ser un dispositivo sin mantenimiento.A<strong>de</strong>más, con este tipo <strong>de</strong> dispositivos se pue<strong>de</strong> obtener también la posición <strong>de</strong>l eje.En esta sección se presenta el diseño <strong>de</strong> un circuito basado en FPGA y <strong>de</strong>l softwareasociado para realizar la medida <strong>de</strong> velocidad <strong>de</strong>l motor a partir <strong>de</strong> un enco<strong>de</strong>r incrementalacoplado a su eje.7.5.1. Funcionamiento <strong>de</strong> un enco<strong>de</strong>r incrementalEste tipo <strong>de</strong> dispositivos constan <strong>de</strong> una rueda con ranuras igualmente espaciadas fijaa su eje. El número <strong>de</strong> ranuras en un parámetro básico <strong>de</strong>l enco<strong>de</strong>r, pues va a marcarel número <strong>de</strong> pulsos por vuelta generados en sus salidas. A ambos lados <strong>de</strong> la ruedaranurada se coloca un emisor <strong>de</strong> luz y un foto-<strong>de</strong>tector (Canal A), <strong>de</strong> forma que el giro <strong>de</strong>ldisco ranurado provocará la iluminación y el oscurecimiento sucesivos <strong>de</strong>l foto-<strong>de</strong>tector,generando éste un tren <strong>de</strong> pulsos que será proporcional a la velocidad angular <strong>de</strong>l disco.7 Por ejemplo si el reloj <strong>de</strong> entrada <strong>de</strong>l circuito es <strong>de</strong> 33 MHz, la mínima frecuencia <strong>de</strong> muestreo si no se usael predivisor es <strong>de</strong> 503 Hz, la cual podría ser elevada en aplicaciones <strong>de</strong> alta potencia en las que el inversor estéconstruido con GTO’s.
7.5 Medida <strong>de</strong> la velocidad con un enco<strong>de</strong>r incremental 109Canal ACanal BCanal CFigura 7.6: Salidas <strong>de</strong> un enco<strong>de</strong>r incremental.Para po<strong>de</strong>r <strong>de</strong>tectar el sentido <strong>de</strong> giro se coloca otro foto-<strong>de</strong>tector (Canal B) separado<strong>de</strong>l primero un ángulo igual a 360o N o Ranuras2con lo que se consigue otro tren <strong>de</strong> pulsosigual al generado por el primer foto-<strong>de</strong>tector, pero <strong>de</strong>sfasado 90 o (eléctricos) tal como semuestra en la figura 7.6. Para po<strong>de</strong>r medir la posición se coloca otro foto-<strong>de</strong>tector (CanalC) enfrentado a otra zona <strong>de</strong>l disco en la cual existe una sola ranura que marca el origen.Este foto<strong>de</strong>tector generará un solo pulso por revolución que indicará el paso por cero <strong>de</strong>leje <strong>de</strong>l enco<strong>de</strong>r, lo que permite conocer la posición <strong>de</strong>l eje mediante la cuenta <strong>de</strong> pulsos<strong>de</strong> cualquiera <strong>de</strong> las salidas (Canal A o Canal B).7.5.2. Métodos <strong>de</strong> medida <strong>de</strong> velocidad a partir <strong>de</strong> un enco<strong>de</strong>r incrementalLa medida <strong>de</strong> velocidad <strong>de</strong> giro se basa en la ecuación:¡θω (7.3)tEn don<strong>de</strong> ω es la velocidad angular <strong>de</strong>l eje <strong>de</strong>l enco<strong>de</strong>r y θ es el ángulo girado pordicho eje en un tiempo t.Tal como se ha dicho en la sección anterior, cada pulso producido en uno <strong>de</strong> loscanales (por ejemplo el A) indica el paso <strong>de</strong> una <strong>de</strong> las ranuras <strong>de</strong>l disco entre el emisor<strong>de</strong> luz y el foto-<strong>de</strong>tector asociado a dicho canal. Por tanto un periodo completo <strong>de</strong> la señal<strong>de</strong> salida implica un giro 2π£ <strong>de</strong> N o Ranuras radianes. Como en un giro completo <strong>de</strong>l ejese producen un número <strong>de</strong> pulsos en la salida igual al número <strong>de</strong> ranuras, a dicho númerose le conoce en la literatura como número <strong>de</strong> pulsos por vuelta (ppv en a<strong>de</strong>lante), que esel parámetro básico <strong>de</strong>l enco<strong>de</strong>r.A partir <strong>de</strong> la ecuación 7.3 se pue<strong>de</strong> <strong>de</strong>ducir que para calcular la velocidad es necesarioo bien medir el tiempo empleado en girar un <strong>de</strong>terminado ángulo θ o bien medirel ángulo θ girado en un <strong>de</strong>terminado tiempo t. El primer método se <strong>de</strong>nomina en la literaturaperiodímetro, pues se mi<strong>de</strong> el periodo <strong>de</strong> la onda <strong>de</strong> salida <strong>de</strong>l enco<strong>de</strong>r, lo quepermite conocer el tiempo empleado en girar un ángulo:θ pulso ¡2πppv(7.4)El segundo método se conoce por frecuencímetro, ya que se mi<strong>de</strong> la frecuencia <strong>de</strong> laseñal <strong>de</strong> salida, es <strong>de</strong>cir, se cuenta el número <strong>de</strong> pulsos (np) producidos en la salida<strong>de</strong>l enco<strong>de</strong>r durante un tiempo T v preestablecido. Esto permite conocer el ángulo girado(np¤ θ pulso ) en dicho tiempo T v .
ω R¡ ω p ¡110 Plataforma experimental7.5.3. Errores cometidos en la medida <strong>de</strong> velocidadLa naturaleza digital <strong>de</strong>l enco<strong>de</strong>r y <strong>de</strong> la medida <strong>de</strong> tiempos hace que se produzcanen ambos métodos <strong>de</strong> medida (frecuencímetro o periodímetro) errores <strong>de</strong> cuantificación.En el caso <strong>de</strong> medida como frecuencímetro el número <strong>de</strong> pulsos contablilzados va a serun número entero, correspondiendo cada cuenta con un ángulo igual a θ pulso . Por tanto elerror <strong>de</strong> cuantificación máximo será:ω R¡ ω f ¡θ pulsoT v(7.5)en don<strong>de</strong> ω f es la medida <strong>de</strong> velocidad obtenida por este método.Como se pue<strong>de</strong> apreciar el error absoluto cometido no <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la velocidad <strong>de</strong> giro<strong>de</strong>l enco<strong>de</strong>r, aunque el error relativo aumenta a medida que dicha velocidad disminuye.En particular, con este método no se obtienen buenos resultados cuando la velocidad<strong>de</strong> giro es <strong>de</strong>l or<strong>de</strong>n <strong>de</strong> θ pulso£ T v . En este caso la medida presenta oscilaciones entre0 y θ pulso£ T v que <strong>de</strong>sestabilizan al controlador. En (Briz <strong>de</strong>l Blanco, 1995) se proponepara disminuir el error <strong>de</strong> cuantificación el uso <strong>de</strong> un filtro digital o aumentar el periodo<strong>de</strong> medida T v . Sin embargo ambos métodos introducen un retraso en la medida <strong>de</strong> lavelocidad, lo que pue<strong>de</strong> ocasionar problemas <strong>de</strong> estabilidad en el controlador.Si se utiliza un periodímetro para la medida <strong>de</strong> la velocidad, la medida <strong>de</strong> tiempodurante un pulso <strong>de</strong>l enco<strong>de</strong>r se realiza con un reloj digital. Por tanto la medida <strong>de</strong>ltiempo será un número entero n t <strong>de</strong> periodos <strong>de</strong>l reloj T p . La velocidad medida con estemétodo vendrá dada entonces por:ω p ¡y el error <strong>de</strong> cuantificación máximo será:θ pulson t T p(7.6)θ pulson t T p¡θ pulsoθ pulson t ¡ n t¡ 1¢ T p(7.7)De esta ecuación se <strong>de</strong>duce que si la duración <strong>de</strong>l pulso <strong>de</strong>l enco<strong>de</strong>r es mucho mayor queel periodo <strong>de</strong>l reloj T p , el error <strong>de</strong> cuantificación será <strong>de</strong>spreciable al tener n t un valorelevado. Sin embargo si la duración <strong>de</strong>l pulso es <strong>de</strong>l or<strong>de</strong>n <strong>de</strong> T p , el error cometido serámuy elevado, lo que hace que este sistema sea inapropiado cuando la velocidad <strong>de</strong> giro<strong>de</strong>l enco<strong>de</strong>r es elevada. Nótese que en el caso extremo en el que la duración <strong>de</strong>l pulso <strong>de</strong>lenco<strong>de</strong>r coincida con T p (n t ¡ 1), el error máximo será infinito, tal como pue<strong>de</strong> <strong>de</strong>ducirse<strong>de</strong> (7.7).Para conseguir una medida precisa <strong>de</strong> la velocidad en todo su rango, en (Briz <strong>de</strong>lBlanco, 1995) se propone el uso <strong>de</strong> un periodímetro en la zona <strong>de</strong> baja velocidad y <strong>de</strong> unfrecuencímetro en la zona <strong>de</strong> alta velocidad; conmutando entre ambos métodos cuandose alcanza una velocidad <strong>de</strong> 300 r.p.m. En este trabajo no se ha consi<strong>de</strong>rado necesario eluso <strong>de</strong> un periodímetro, ya que el frecuencímetro utilizado da buenos resultados a partir<strong>de</strong> 15 r.p.m. que es suficiente para el estudio llevado a cabo en esta tesis.¡ n t¡ 1¢ T p¡7.5.4. Circuito basado en FPGA para medida <strong>de</strong> los pulsos <strong>de</strong>l enco<strong>de</strong>rSegún se ha expuesto en la sección 7.5.2, para obtener la velocidad angular <strong>de</strong>l enco<strong>de</strong>rusando el método <strong>de</strong>l frecuencímetro, es necesario contar el número <strong>de</strong> pulsos que
7.6 Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo real 111Ch BCh A Filtro DigitalSentidoFiltro Digitalx 4Cnt1616N PulsosDer/Izq<strong>de</strong> GiroFigura 7.7: Diagrama <strong>de</strong> bloques <strong>de</strong>l circuito <strong>de</strong> interfaz con el enco<strong>de</strong>r incremental.se producen durante un tiempo <strong>de</strong>terminado. Dada la naturaleza asíncrona <strong>de</strong> los pulsos<strong>de</strong>l enco<strong>de</strong>r es necesario el uso <strong>de</strong> un circuito específico. Al igual que ocurre conel circuito <strong>de</strong> modulación PWM, dicho circuito pue<strong>de</strong> estar integrado en el propio microprocesador,lo cual es cada vez más frecuente en los microcontroladores actuales; sepue<strong>de</strong> realizar con componentes discretos, utilizando un contador LSI junto con la circuitería<strong>de</strong> control asociada o bien se pue<strong>de</strong>n integrar estos dispositivos en una FPGA,lo cual dota al circuito <strong>de</strong> una mayor flexibilidad. En este trabajo se ha optado por estaúltima alternativa, integrándose este circuito junto con la etapa <strong>de</strong> modulación PWM enuna sola FPGA.Un diagrama <strong>de</strong> bloques <strong>de</strong>l circuito se muestra en la figura 7.7. Como se pue<strong>de</strong>apreciar las entradas <strong>de</strong>l circuito son los dos canales <strong>de</strong>l enco<strong>de</strong>r: “Ch A” y “Ch B”, loscuales se filtran en los bloques “Filtro Digital” para eliminar las posibles perturbacionesprovocadas por el ruido. La señal filtrada se introduce en el circuito “Sentido <strong>de</strong> Giro”,don<strong>de</strong> se obtiene la dirección <strong>de</strong> giro <strong>de</strong>l enco<strong>de</strong>r y al circuito “x 4” don<strong>de</strong> se multiplicapor cuatro el número <strong>de</strong> pulsos <strong>de</strong>l enco<strong>de</strong>r. La salida <strong>de</strong> este último bloque alimentaun contador <strong>de</strong> 16 bits “Cnt 16” que será el encargado <strong>de</strong> contabilizar el número <strong>de</strong>pulsos producidos por el enco<strong>de</strong>r. Las salidas <strong>de</strong>l circuito son una palabra <strong>de</strong> 16 bits“N Pulsos” y el bit “Der/Izq” que indica el sentido <strong>de</strong> giro. Ambas salidas son accesiblesdirectamente por el microprocesador, habiéndose situado el número <strong>de</strong> pulsos <strong>de</strong>l enco<strong>de</strong>ren la dirección 1 <strong>de</strong>l mapa <strong>de</strong> registros <strong>de</strong>l circuito y el bit <strong>de</strong> sentido <strong>de</strong> giro en el bit 14<strong>de</strong>l registro <strong>de</strong> estado (dirección 0).7.6. Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo realEl programa <strong>de</strong> control para implantar los algoritmos <strong>de</strong>sarrollados en esta tesis ha<strong>de</strong> ejecutarse cada periodo <strong>de</strong> muestreo, in<strong>de</strong>pendientemente <strong>de</strong> la carga que pueda tenerel or<strong>de</strong>nador en cada momento. Es <strong>de</strong>cir, cada vez que el circuito <strong>de</strong> modulación PWMenvíe una interrupción al microprocesador indicándole que ha finalizado un periodo <strong>de</strong>muestreo, éste ha <strong>de</strong> aten<strong>de</strong>r dicha interrupción inmediatamente para, a partir <strong>de</strong>l algoritmo<strong>de</strong> control implantado, calcular la tensión a aplicar en el siguiente periodo <strong>de</strong>muestreo y programar los tiempos <strong>de</strong> conmutación <strong>de</strong> cada una <strong>de</strong> las ramas <strong>de</strong>l inversor
112 Plataforma experimentalen el chip. Por tanto es imprescindible utilizar técnicas <strong>de</strong> programación en tiempo real 8para implantar el algoritmo <strong>de</strong> control.Existen varias alternativas para implantar un programa en tiempo real. Si el programase va a ejecutar en un sistema <strong>de</strong>dicado, como por ejemplo un microcontrolador o unDSP, se pue<strong>de</strong> realizar una programación a medida utilizando técnicas <strong>de</strong> tiempo real(Auslan<strong>de</strong>r et al., 1996). En este caso el método más común consiste en realizar un buclesin fin en el que en cada periodo <strong>de</strong> muestreo se mi<strong>de</strong>n las entradas, se ejecuta el algoritmo<strong>de</strong> control y se actualizan las salidas, quedando el programa a la espera <strong>de</strong>l siguienteperiodo <strong>de</strong> muestreo.La técnica anterior, si bien pue<strong>de</strong> ser apropiada para sistemas empotrados, no es aplicableen un entorno <strong>de</strong> investigación, ya que en este caso, a<strong>de</strong>más <strong>de</strong> controlar el sistema,es necesario guardar ciertas variables a disco para su posterior análisis o permitir uninterfaz con el usuario más versátil. En estos casos en los que el sistema ha <strong>de</strong> realizarotras tareas aparte <strong>de</strong> ejecutar el algoritmo <strong>de</strong> control, se hace imprescindible el uso <strong>de</strong> unsistema operativo que se encargue <strong>de</strong> la gestión <strong>de</strong>l sistema. Sin embargo, los sistemas operativos<strong>de</strong> tiempo compartido convencionales, como por ejemplo Linux o Windows NT,están optimizados para ofrecer la mejor respuesta en el caso general, 9 no para garantizarun tiempo <strong>de</strong> respuesta máximo. Así en un Pentium 200 MHz con el sistema operativoLinux, el tiempo <strong>de</strong> respuesta medio ante una petición <strong>de</strong> interrupción es <strong>de</strong> 2 µs. Sinembargo, el tiempo máximo no está acotado, pudiendo llegar a cientos <strong>de</strong> milisegundoscuando la máquina está sobrecargada (Barabanov y Yodaiken, 1997). Este hecho impi<strong>de</strong>el uso <strong>de</strong> un sistema operativo <strong>de</strong> propósito general para tareas <strong>de</strong> control en las que elperiodo <strong>de</strong> muestreo es <strong>de</strong>l or<strong>de</strong>n <strong>de</strong> unos milisegundos, siendo imprescindible en estoscasos el uso <strong>de</strong> un sistema operativo en tiempo real.Existen varias alternativas para crear un sistema operativo en tiempo real. La máscomún consiste en la escritura <strong>de</strong>s<strong>de</strong> cero <strong>de</strong>l sistema operativo. Ejemplos <strong>de</strong> este tipo<strong>de</strong> sistemas son QNX o VxWorks. Sin embargo estas soluciones son caras y al no teneruna amplia base <strong>de</strong> usuarios no están lo suficientemente probadas ni soportan la ampliagama <strong>de</strong> dispositivos que soportan los sistemas operativos <strong>de</strong> tiempo compartido convencionales.Una alternativa a estos sistemas consiste en modificar un sistema operativoconvencional para que pueda ejecutar ciertas tareas críticas en tiempo real.7.6.1. El sistema operativo RT-LinuxEste sistema nació como una tesis <strong>de</strong> master en la Universidad <strong>de</strong> Nuevo Méjico(Barabanov, 1997). Al igual que Linux, es un sistema <strong>de</strong> código fuente abierto bajo licenciaGPL. 10 El fundamento <strong>de</strong>l sistema consiste en hacer convivir en una misma máquinaun sistema operativo <strong>de</strong> tiempo real simple junto con un complejo sistema operativo <strong>de</strong>propósito general como es Linux. La ventaja <strong>de</strong> esta aproximación al problema es ladisponibilidad en Linux <strong>de</strong> todo tipo <strong>de</strong> servicios como acceso a red, gestión <strong>de</strong> almacenamientosecundario o interfases gráficas <strong>de</strong> usuario que, en el caso <strong>de</strong> un sistema8 Un sistema informático en tiempo real es aquel en el que la corrección <strong>de</strong>l resultado <strong>de</strong>pen<strong>de</strong> tanto <strong>de</strong> suvali<strong>de</strong>z lógica como <strong>de</strong>l instante en que se produce.9 Ejemplos <strong>de</strong> este tipo <strong>de</strong> optimizaciones son (Barabanov y Yodaiken, 1997): 1) Sincronización <strong>de</strong> datos<strong>de</strong> grano grueso. 2) Las tareas <strong>de</strong> baja prioridad pue<strong>de</strong>n ejecutarse aunque existan tareas <strong>de</strong> más alta priorida<strong>de</strong>sperando. 3) No se pue<strong>de</strong>n interrumpir las llamadas al sistema, aunque éstas hayan sido realizadas por tareas<strong>de</strong> baja prioridad. 4) Se reor<strong>de</strong>nan las peticiones <strong>de</strong> acceso a los recursos.10 GNU Public License.
7.6 Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo real 113Hardware <strong>de</strong> control <strong>de</strong> interrupcionesNucleo <strong>de</strong> tiempo realTareas <strong>de</strong> tiempo RealNucleo LinuxRT-FIFOSProcesos <strong>de</strong> usuarioFigura 7.8: Diagrama <strong>de</strong> bloques <strong>de</strong>l sistema operativo RT-Linux.operativo <strong>de</strong> tiempo real convencional han <strong>de</strong> programarse <strong>de</strong>s<strong>de</strong> cero, con el consiguienteincremento en el coste y falta <strong>de</strong> fiabilidad, pues estos servicios son utilizados poruna base <strong>de</strong> usuarios mucho menor.En la figura 7.8 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong> RT-Linux. Como se pue<strong>de</strong>apreciar existe un núcleo en tiempo real que gestiona tanto las tareas <strong>de</strong> tiempo real comoel núcleo <strong>de</strong> Linux, <strong>de</strong> forma que Linux es la tarea <strong>de</strong> más baja prioridad, ejecutándosesólo cuando no existe ninguna tarea <strong>de</strong> tiempo real pendiente.Como se pue<strong>de</strong> apreciar en la figura, el núcleo <strong>de</strong> tiempo real hace <strong>de</strong> interfaz entre elhardware <strong>de</strong> control <strong>de</strong> interrupciones y el resto <strong>de</strong>l sistema. De esta manera al núcleo <strong>de</strong>Linux no se le permite inhabilitar las interrupciones cuando entra en una zona crítica. 11Ésto es posible gracias a la disponibilidad <strong>de</strong>l código fuente <strong>de</strong> Linux, ya que RT-Linuxsustituye las rutinas <strong>de</strong> habilitación e inhabilitación <strong>de</strong> interrupciones <strong>de</strong> Linux por unasrutinas propias que en lugar <strong>de</strong> inhabilitar las interrupciones físicas, activan una ban<strong>de</strong>raque hace que el núcleo <strong>de</strong> RT-Linux <strong>de</strong>je pasar las peticiones <strong>de</strong> interrupción <strong>de</strong> losdispositivos al núcleo <strong>de</strong> Linux o las almacene en una lista <strong>de</strong> peticiones pendientes parapasarlas al núcleo <strong>de</strong> Linux cuando éste vuelva a “habilitar” las interrupciones. Cabe<strong>de</strong>stacar que las modificaciones que hay que realizar en el núcleo estándar <strong>de</strong> Linux sonmínimas: se modifican menos <strong>de</strong> 20 líneas <strong>de</strong> código y se aña<strong>de</strong>n unas 50 líneas nuevas(Mantegazza et al., 2000).Por último conviene <strong>de</strong>stacar que las prestaciones obtenidas con el sistema son más11 Al no ser Linux un sistema operativo <strong>de</strong> tiempo real no se minimiza la permanencia <strong>de</strong>l sistema en unazona crítica para evitar numerosos cambios <strong>de</strong> contexto que pue<strong>de</strong>n ralentizar la máquina. A<strong>de</strong>más las zonascríticas <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> los drivers <strong>de</strong> dispositivos instalados, por lo que es prácticamente imposible calcular unacota superior <strong>de</strong> la duración <strong>de</strong> las zonas críticas.
114 Plataforma experimentalque suficientes para cualquier aplicación <strong>de</strong> tiempo real. Por ejemplo en un Pentium IIa 333 MHz, el tiempo <strong>de</strong> latencia 12 medio es <strong>de</strong> 2 µs y el tiempo máximo es <strong>de</strong> 25 µs,in<strong>de</strong>pendientemente <strong>de</strong> la carga <strong>de</strong>l or<strong>de</strong>nador. Si se realiza la misma medida usandoLinux, aún incluyendo las extensiones POSIX <strong>de</strong> tiempo real (IEEE, 1995), aunque eltiempo <strong>de</strong> latencia medio sigue siendo el mismo, los tiempos máximos son (Barabanov yYodaiken, 1997):100 µs si la máquina está <strong>de</strong>scargada.0,5 ms con actividad mo<strong>de</strong>rada <strong>de</strong> I/O.Unos ms al arrancar Netscape.18 ms al escribir un archivo <strong>de</strong> gran<strong>de</strong>s dimensiones a disco.lo cual es inadmisible en una aplicación en tiempo real si el periodo <strong>de</strong> muestreo es <strong>de</strong>lor<strong>de</strong>n <strong>de</strong> unos milisegundos.7.6.2. Metodología <strong>de</strong> programación en RT-LinuxPara realizar un sistema en tiempo real bajo RT-Linux, es necesario dividir el sistemaen tareas que han <strong>de</strong> ejecutarse en tiempo real, como por ejemplo las rutinas <strong>de</strong> adquisición<strong>de</strong> datos o <strong>de</strong> control y tareas que no tienen restricciones temporales estrictas, comoel interfaz con el usuario, el almacenamiento en disco o las comunicaciones.Las tareas <strong>de</strong> tiempo real estarán controladas directamente por el núcleo <strong>de</strong> tiemporeal, con lo que su tiempo <strong>de</strong> respuesta será <strong>de</strong>terminista. El núcleo <strong>de</strong> RT-Linux permite<strong>de</strong>finir tareas periódicas o tareas disparadas mediante interrupciones hardware. La únicarestricción impuesta a estas tareas es la imposibilidad <strong>de</strong> usar los servicios <strong>de</strong> Linux,como por ejemplo acceso a disco o memoria dinámica. 13 En la práctica estas rutinassólo realizarán la parte crítica <strong>de</strong>l sistema en tiempo real, por lo que su complejidad noserá muy elevada.El resto <strong>de</strong> tareas <strong>de</strong>l sistema se implantarán en el espacio <strong>de</strong> usuario <strong>de</strong> Linux, <strong>de</strong>la misma manera que el resto <strong>de</strong> programas, por lo que tienen a su disposición todos losservicios <strong>de</strong>l sistema operativo.La comunicación entre las tareas <strong>de</strong> tiempo real y las tareas en espacio <strong>de</strong> usuario serealiza mediante pilas FIFO (RT-FIFOS). Si es necesario un gran trasvase <strong>de</strong> datos, pue<strong>de</strong>usarse memoria compartida.7.6.3. Estructura <strong>de</strong>l programa <strong>de</strong> controlEn este trabajo se ha elegido RT-Linux para realizar el programa <strong>de</strong> control. El sistemase ha dividido en una tarea <strong>de</strong> control que se ejecuta en tiempo real y una tarea <strong>de</strong>supervisión que se ejecuta en espacio <strong>de</strong> usuario, tal como se muestra en la figura 7.9. Latarea <strong>de</strong> control es disparada por la interrupción <strong>de</strong> fin <strong>de</strong> periodo <strong>de</strong> muestreo que generala FPGA <strong>de</strong> modulación PWM y calcula los tiempos <strong>de</strong> conmutación <strong>de</strong> cada una <strong>de</strong> lasramas <strong>de</strong>l inversor. La tarea <strong>de</strong> supervisión se encarga <strong>de</strong> arrancar o parar el experimento12 El tiempo <strong>de</strong> latencia es el tiempo que transcurre <strong>de</strong>s<strong>de</strong> que se produce una interrupción hasta que secomienza a ejecutar su rutina <strong>de</strong> atención.13 Para po<strong>de</strong>r acce<strong>de</strong>r a estos servicios el núcleo <strong>de</strong> Linux tendría que ser reentrante, no <strong>de</strong>bería <strong>de</strong> bloquearel acceso a las interrupciones. . . En <strong>de</strong>finitiva, tendría que ser un núcleo en tiempo real.
2i S 3//7.6 Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo real 115InterfazPWM+Enco<strong>de</strong>rIntT u T v T wTarea <strong>de</strong><strong>Control</strong>RT-FIFOTarea <strong>de</strong>SupervisiónFigura 7.9: Diagrama <strong>de</strong> bloques <strong>de</strong>l programa <strong>de</strong> control.¦¡£¢¥¤¥¦¨§©¨¢¢i r i s¤¥¦¨©©!¢" ¡£¢¥¤¥¦¨§©¨¢ω R¤$# ¤¥§ t u% t v% t wt u% t v% t w&('¤$©)*¦¨§©)+¢park0 i r% i s1,- .¦Figura 7.10: Diagrama <strong>de</strong> flujo <strong>de</strong>l programa <strong>de</strong> control.y <strong>de</strong> guardar a disco una serie <strong>de</strong> variables para su posterior análisis. La comunicaciónentre ambas tareas se realiza mediante una RT-FIFO.En la figura 7.10 se muestra un diagrama <strong>de</strong> flujo <strong>de</strong> la rutina <strong>de</strong> control. Como sepue<strong>de</strong> apreciar en primer lugar se toman las medidas <strong>de</strong> corriente y <strong>de</strong> velocidad para acontinuación realizar la transformada <strong>de</strong> Park para calcular las componentes d y q <strong>de</strong> lacorriente <strong>de</strong> estator referidas a ejes <strong>de</strong> estator. Una vez que se conocen las entradas alcontrolador se llama a la rutina <strong>de</strong> control no lineal, la cual calcula la tensión u s que esnecesario aplicar al motor. A partir <strong>de</strong> esta tensión se calculan los tiempos <strong>de</strong> conmutación<strong>de</strong> cada una <strong>de</strong> las ramas <strong>de</strong>l inversor utilizando el algoritmo mostrado en el apéndice Dy se escriben dichos tiempos en la FPGA <strong>de</strong> modulación PWM.<strong>Control</strong>ador no linealPara po<strong>de</strong>r ensayar el sistema con distintos controladores no lineales, el cálculo <strong>de</strong>lcontrolador se realiza <strong>de</strong>ntro <strong>de</strong> una función. Un diagrama <strong>de</strong> flujo <strong>de</strong> dicha función semuestra en la figura 7.11. En primer lugar se estima el flujo <strong>de</strong> rotor y una vez conocido suángulo se gira el vector espacial <strong>de</strong> la corriente <strong>de</strong> estator para referirlo a unos ejes d-q que
2116 Plataforma experimental<strong>Control</strong>adorno lineal12 Estimadorψ Rcálculo2u r SGiro i S a2ejes <strong>de</strong> flujoantiwindupcálculoi r SrGiro 2 u r S aejes <strong>de</strong> estator1Fin <strong>Control</strong>adorno linealFigura 7.11: Diagrama <strong>de</strong> flujo <strong>de</strong> la función <strong>de</strong> control no lineal.están orientados según el flujo <strong>de</strong> rotor. A continuación se aplica el controlador no linealpara calcular las referencias <strong>de</strong> las corrientes <strong>de</strong> estator y mediante dos reguladores PI secalculan, a partir <strong>de</strong> estas referencias, las tensiones <strong>de</strong> estator en ejes d-q <strong>de</strong> flujo <strong>de</strong> rotorque es necesario aplicar a la máquina. Si el módulo <strong>de</strong> la tensión supera la tensión máximaque pue<strong>de</strong> proporcionar el inversor, se reduce el módulo <strong>de</strong>l vector espacial <strong>de</strong> tensiónsegún (4.27) <strong>de</strong> forma que el ángulo <strong>de</strong>l vector espacial no se modifique. Para evitarque las integrales <strong>de</strong> los reguladores PI y <strong>de</strong> los controladores Lyapunov-Integral crezcan<strong>de</strong>smesuradamente en esta situación, se aplican dos algoritmos <strong>de</strong> anti-windup: backcalculationand tracking (Åström y Hägglund, 1995) para los reguladores PI lineales yel algoritmo <strong>de</strong>sarrollado en la sección 4.2.3 para el regulador Lyapunov-Integral. Porúltimo, antes <strong>de</strong> <strong>de</strong>volver su valor al programa <strong>de</strong> control, el vector espacial <strong>de</strong> tensiónse gira a ejes <strong>de</strong> estator teniendo en cuenta el giro realizado por los ejes <strong>de</strong> flujo <strong>de</strong> rotordurante el periodo <strong>de</strong> muestreo, según se ha mostrado en la sección 3.4.2.Estimador <strong>de</strong> flujo <strong>de</strong> rotorEn la figura 7.12 se muestra un diagrama <strong>de</strong> flujo <strong>de</strong> la función que estima el flujo<strong>de</strong> rotor. Como se pue<strong>de</strong> apreciar, en primer lugar se llama a una función para estimarel valor <strong>de</strong> la resistencia <strong>de</strong> rotor, actualizándose los parámetros que <strong>de</strong>pen<strong>de</strong>n <strong>de</strong> suvalor solamente cuando la máquina está en régimen permanente, ya que cuando existenvariaciones <strong>de</strong> la velocidad <strong>de</strong> giro, el error cometido por el estimador <strong>de</strong> resistencia<strong>de</strong> rotor es significativo. A continuación se calcula el vector <strong>de</strong> flujo <strong>de</strong> rotor medianteuno <strong>de</strong> los estimadores presentados en el capítulo 6 y una vez conocido el valor <strong>de</strong> sus
ω R 327.6 Implantación <strong>de</strong>l programa <strong>de</strong> control en tiempo real 117Estimador<strong>de</strong> flujo1EstimadorR Rcálculoψ s RNocteSicálculo2ψR s 2ψRs y¡Actualización<strong>de</strong> parámetroscálculoω S1Fin Estimador<strong>de</strong> flujoFigura 7.12: Diagrama <strong>de</strong> flujo <strong>de</strong>l estimador <strong>de</strong> flujo.componentes se calcula su módulo y su ángulo. 14 Por último se calcula la velocidad <strong>de</strong>giro <strong>de</strong>l vector <strong>de</strong> flujo ω S , que es necesaria para la compensación <strong>de</strong>l giro <strong>de</strong> los ejesrealizada en el controlador.Estimador <strong>de</strong> resistencia <strong>de</strong> rotorEl diagrama <strong>de</strong> flujo para implantar el estimador <strong>de</strong> resistencia <strong>de</strong> rotor discutido enla sección 6.3 se muestra en la figura 7.13. En primer lugar se calculan las <strong>de</strong>rivadase integrales <strong>de</strong> la corriente y la tensión <strong>de</strong> estator aplicando un filtro paso-banda <strong>de</strong> 4 oor<strong>de</strong>n, con frecuencias <strong>de</strong> corte en 5 Hz y 100 Hz. Para evitar distorsionar la forma <strong>de</strong>onda <strong>de</strong> las entradas se ha elegido un filtro <strong>de</strong> Bessel, ya que este tipo <strong>de</strong> filtros tieneuna respuesta <strong>de</strong> fase lineal. A continuación se calculan los números complejos v 1 y v 2(ecuaciones (6.13) y (6.14) respectivamente) y sus integrales. Para filtrar el ruido presenteen la medida <strong>de</strong> la velocidad, se le aplica el algoritmo <strong>de</strong> promediado utilizado para filtrarlos números complejos u e y (6.20):Ω Rk ¡¢λ ω Ω Rk ¡ 1¡ 1 ¡ λ ω ¢ ω R (7.8)en don<strong>de</strong> Ω Rk es el valor promediado <strong>de</strong> la velocidad y λ ω es el factor <strong>de</strong> olvido utilizadopara el promediado, que se ha <strong>de</strong> elegir menor que el factor <strong>de</strong> olvido utilizado para elpromediado <strong>de</strong> la resistencia <strong>de</strong> rotor, 15 ya que la constante <strong>de</strong> tiempo mecánica será14 Salvo en el estimador en ejes <strong>de</strong> flujo <strong>de</strong> rotor mostrado en la sección 6.2.1, ya que en este estimador seobtienen directamente el módulo y el ángulo <strong>de</strong>l vector espacial <strong>de</strong> flujo <strong>de</strong> rotor.15 Nótese que en lugar <strong>de</strong> promediar el valor <strong>de</strong> la resistencia <strong>de</strong> rotor se ha promediado el valor <strong>de</strong> loselementos que intervienen en su cálculo: u, y y u¢ y. Sin embargo, el resultado es similar al obtenido filtrando
2118 Plataforma experimentalEstimador<strong>de</strong> R R1dFin Estima-dor <strong>de</strong> R Rdtddtcálculo2u s S %¥£2u s S2ıS s 2ıSs %¤£Y TkU k2Nor kcálculo¢ 0% v852cálculoR Rk 3Ω Rk2v 1% £2v 1% £2cálculo2 ¦¦¦2U k¦¦¦2%¦¦¦2Y k¦¦¦Si¡U 2 k ¡Y 2k1Figura 7.13: Diagrama <strong>de</strong> flujo <strong>de</strong>l estimador <strong>de</strong> resistencia <strong>de</strong> rotor.menor que la constante <strong>de</strong> tiempo térmica que marca el calentamiento <strong>de</strong>l rotor y portanto la variación <strong>de</strong> su resistencia. Una vez conocido el valor <strong>de</strong> la velocidad <strong>de</strong> girose calculan los valores promediados <strong>de</strong> los complejos u e y y <strong>de</strong> su producto escalaru y aplicando (6.20), (6.21) y (6.24). A partir <strong>de</strong> estos valores se calcula el coeficiente<strong>de</strong> correlación según (6.23) y sólo si éste es mayor <strong>de</strong> 0,85 se actualiza el valor <strong>de</strong> laresistencia <strong>de</strong> rotor.7.7. ConclusionesEn este capítulo se ha presentado el banco <strong>de</strong> ensayos utilizado para validar los controladorespresentados en esta tesis. Se ha mostrado que el uso <strong>de</strong> un PC estándar es unaalternativa viable frente a otras implantaciones basadas en DSP o en microcontroladores,que son las utilizadas más habitualmente en la literatura. Sin embargo, para po<strong>de</strong>r usarel PC como plataforma <strong>de</strong> <strong>de</strong>sarrollo ha sido necesaria la creación <strong>de</strong> una tarjeta paraconectar el PC con el inversor y el enco<strong>de</strong>r incremental. Para ello se ha utilizado una FP-GA, lo cual ha permitido reducir el espacio ocupado en la placa <strong>de</strong> circuito impreso y hadotado al circuito <strong>de</strong> una elevada flexibilidad, lo cual es muy interesante en un laboratorio<strong>de</strong> investigación don<strong>de</strong> las modificaciones son muy necesarias. El uso <strong>de</strong> un PC estándartambién ha obligado al uso <strong>de</strong> un sistema operativo en tiempo real para implantar lasrutinas <strong>de</strong> control, habiéndose mostrado que el sistema operativo Real-Time Linux es unaalternativa viable frente a soluciones propietarias como QNX o Vx-Works, presentandola estimación (Zamora Macho, 1997)
7.7 Conclusiones 119como principales ventajas el disponer <strong>de</strong>l código fuente libre, una comunidad <strong>de</strong> usuariosmuy activa y un precio mucho menor (gratuito si no se precisa soporte técnico).
120 Plataforma experimental
Capítulo 8Resultados8.1. IntroducciónPara validar las prestaciones <strong>de</strong> los controladores y estimadores estudiados en estatesis, se han realizado una serie <strong>de</strong> experimentos en el banco <strong>de</strong> ensayos <strong>de</strong>scrito enel capítulo 7. Esto ha permitido evaluar dichos controladores y estimadores cuando seaplican en situaciones reales en las que intervienen una serie <strong>de</strong> perturbaciones en elsistema como ruido en las medidas, retrasos, saturaciones, etc. No obstante sólo se hanimplantado aquellos controladores que en simulación han mostrado un comportamientosatisfactorio; en particular el controlador Lyapunov-Integral y el controlador vectorial directo.Con el objetivo <strong>de</strong> mostrar las mejoras aportadas por estos controladores frente auno menos sofisticado como es el controlador vectorial indirecto, se han realizado tambiénuna serie <strong>de</strong> ensayos usando este último controlador, cuyo <strong>de</strong>sarrollo se muestra enel apéndice F. Conviene <strong>de</strong>stacar que para realizar todos los experimentos <strong>de</strong>scritos eneste capitulo no se ha puesto un especial cuidado en la puesta en marcha (commissioning)<strong>de</strong>l accionamiento, lo cual <strong>de</strong>muestra la robustez <strong>de</strong> los controladores ensayados.8.2. <strong>Control</strong>ador Lyapunov-IntegralEn primer lugar se muestran los resultados obtenidos cuando se implanta el controladorLyapunov-Integral <strong>de</strong>sarrollado en el capítulo 4 con los reguladores <strong>de</strong> corrientediseñados en el apéndice E. Las ganancias <strong>de</strong>l controlador Lyapunov-Integral se hanelegido: k 1 ¡ 250, I 1 ¡ 4, k aw1 ¡ 0¢ 05, k 2 ¡ 50, I 2 ¡ 8 y k aw2 ¡ 25. Por lo tanto, segúnse ha <strong>de</strong>mostrado en la sección 4.2, el control <strong>de</strong> flujo <strong>de</strong> rotor tendrá sus polos situadosen 250 y 4 y el control <strong>de</strong> velocidad en 50 y 8. Los controladores <strong>de</strong> corriente son ahora<strong>de</strong> tercer or<strong>de</strong>n, según se pue<strong>de</strong> ver en el apéndice E. Las ganancias <strong>de</strong> los controladores<strong>de</strong> corriente se han diseñado mediante asignación <strong>de</strong> polos <strong>de</strong> forma que el sistema en500lazo cerrado tenga un polo en 1000 y los otros dos en 500 2 j s. Tanto los controladoresLyapunov-Integral como los reguladores <strong>de</strong> corriente se implantan en tiempo2discreto con un periodo <strong>de</strong> 0¢ muestreo <strong>de</strong> 5 ms.En la figura 8.1 se muestra la evolución <strong>de</strong>l flujo estimado y <strong>de</strong> la velocidad <strong>de</strong> giro. Eltransitorio elegido para las referencias es el mismo que se ha usado para la simulación <strong>de</strong>lcontrolador en la sección 4.4.2, salvo que en la aplicación experimental no se ha podido
122 Resultados1.20.80.4ψ Restimado005101520253001500-150-3000510ω R 251520Figura 8.1: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral. Eje x en seg. Eje y en W b y en rad el s.i S242.521.510.50141618 20ω R (–) y ω Rr (- -)22320300280260141618202224Figura 8.2: Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador Lyapunov-Integral. Eje x en seg. Eje y en A y en rad el s.variar la inercia <strong>de</strong>l accionamiento. Según se ha comentado en el capítulo 7, para po<strong>de</strong>rvariar el par <strong>de</strong> carga <strong>de</strong> la máquina <strong>de</strong> inducción, el banco dispone <strong>de</strong> una máquina <strong>de</strong>continua. Al principio <strong>de</strong>l experimento la máquina <strong>de</strong> continua está sin excitar, <strong>de</strong> formaque la carga <strong>de</strong> la máquina <strong>de</strong> inducción será solamente la <strong>de</strong>bida al arrastre <strong>de</strong> la dinamo.En t ¡ 15 s se conecta la excitación <strong>de</strong> la máquina <strong>de</strong> continua a una tensión <strong>de</strong> 100 V. Lapotencia generada por la máquina en este caso es igual a 133 W. Como se pue<strong>de</strong> apreciar
8.2 <strong>Control</strong>ador Lyapunov-Integral 1231.20.80.4ψ Restimado005101520253001500-150-3000510ω R 251520Figura 8.3: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral diseñado para J ¡ 0¢ 005kgr¤ m 2 Eje x en seg. Eje y en Wb y en rad el s.i S242.521.510.50141618 20ω R (–) y ω Rr (- -)22320300280260240220141618202224Figura 8.4: Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador Lyapunov-Integral diseñado para J ¡ 0¢ 005kgr¤ m 2 .Eje x en seg. Eje y en A y en rad el s.en el <strong>de</strong>talle <strong>de</strong> la figura 8.2, el único efecto <strong>de</strong>l escalón en la carga consiste en hacer unpoco más lento el siguiente transitorio <strong>de</strong> aceleración <strong>de</strong>l accionamiento.Para po<strong>de</strong>r verificar los efectos <strong>de</strong> una variación <strong>de</strong> la inercia en una aplicación real,se ha realizado un ensayo en las mismas condiciones que el mostrado en la figura 8.1,pero con los controladores diseñados suponiendo que la inercia <strong>de</strong>l accionamiento esigual a 0¢ 005kgr¤ m 2 en lugar <strong>de</strong> 0¢ 01kgr ¤ m 2 . Los resultados obtenidos se muestran en
124 ResultadosˆR R (—) y R R (- -)4030201000510152025Factor <strong>de</strong> correlacion10.50-0.5-10510152025Figura 8.5: Evolución <strong>de</strong> la estimación <strong>de</strong> R R y <strong>de</strong> su factor <strong>de</strong> correlación.las figuras 8.3 y 8.4, don<strong>de</strong> se pue<strong>de</strong> observar que el comportamiento <strong>de</strong>l accionamientoes similar al observado cuando no existe error en la inercia. Tan sólo merece <strong>de</strong>stacar unamayor perturbación en la estimación <strong>de</strong>l flujo y en la velocidad entre t ¡ 18 s y t ¡ 20 s,tal como se aprecia en el <strong>de</strong>talle <strong>de</strong> la figura 8.4.8.2.1. Estimación <strong>de</strong> la resistencia <strong>de</strong> rotorEn los ensayos anteriores también se ha aplicado el estimador <strong>de</strong> la resistencia <strong>de</strong>lrotor <strong>de</strong>sarrollado en la sección 6.3, pudiéndose observar en la figura 8.5 la evolución<strong>de</strong>l valor estimado <strong>de</strong> R R y <strong>de</strong>l factor <strong>de</strong> correlación. El factor <strong>de</strong> olvido elegido parael ensayo ha sido λ ¡ 0¢ 97, lo que equivale a una constante <strong>de</strong> tiempo <strong>de</strong> la ventanaexponencial <strong>de</strong> τ ¡ 16 ms. 1 A<strong>de</strong>más el valor estimado <strong>de</strong> R R sólo se ha actualizadocuando el factor <strong>de</strong> correlación r k ha sido mayor <strong>de</strong> 0,65. Según se ha mostrado en lasección 6.3, el estimador <strong>de</strong> resistencia <strong>de</strong> rotor sólo funciona correctamente en régimenpermanente <strong>de</strong> la velocidad y cuando el par es suficientemente elevado. Por tanto, sólo<strong>de</strong>spués <strong>de</strong> conectar la excitación <strong>de</strong> la máquina <strong>de</strong> c. c. en t ¡ 15 s la estimación <strong>de</strong> laresistencia <strong>de</strong>l rotor es fiable. Antes <strong>de</strong> ese instante la estimación no es buena, lo cuales reflejado por el factor <strong>de</strong> correlación, y por tanto el valor <strong>de</strong> R R no se actualiza enlas ecuaciones <strong>de</strong>l controlador. Mención especial merece el efecto <strong>de</strong>l <strong>de</strong>bilitamiento <strong>de</strong>lcampo llevado a cabo en t ¡ 22 s en la estimación <strong>de</strong> la resistencia <strong>de</strong>l rotor. Como sepue<strong>de</strong> observar en la figura 8.5, aunque el factor <strong>de</strong> correlación mejora notablemente,la estimación <strong>de</strong> la resistencia <strong>de</strong>l rotor empeora en un 30 %. Sin embargo, si se simulael accionamiento en las mismas condiciones en las que se ha realizado el ensayo, estefenómeno no se observa en absoluto.1 Se ha elegido un valor <strong>de</strong> λ pequeño para po<strong>de</strong>r apreciar la evolución <strong>de</strong>l estimador en un ensayo corto.Como la resistencia <strong>de</strong> rotor varía lentamente, en una aplicación real se pue<strong>de</strong> elegir un valor <strong>de</strong> λ más próximoa uno para conseguir un mejor filtrado <strong>de</strong> la estimación.
8.3 <strong>Control</strong> vectorial directo 125<strong>Control</strong>ador Cte. dom. Cte. no dom. K P K IFlujo 0,25 s 0,004 s 9,6206 40,9479Vel. (J ¡ 0¢ 01kgr¤ m 2 ) 0,125 s 0,02 s 0,2863 1,9713Vel. (J ¡ 0¢ 005kgr ¤ m 2 ) 0,125 s 0,02 s 0,1432 0,9856Cuadro 8.1: Constantes <strong>de</strong> tiempo en bucle cerrado y ganancias <strong>de</strong>l controlador vectorialdirecto. Los dos valores <strong>de</strong> J mostrados en la tabla son los valores <strong>de</strong> la inercia que sehan usado en el diseño <strong>de</strong> cada controlador.Para explicar el comportamiento <strong>de</strong>l estimador <strong>de</strong> resistencia <strong>de</strong> rotor en la zona <strong>de</strong><strong>de</strong>bilitamiento <strong>de</strong>l campo, conviene recordar que en la sección 6.3 se ha mostrado que laresistencia <strong>de</strong> rotor se estima a partir <strong>de</strong> la ecuación:y¤ ¡¥¢u¤ ¡¥¢v 1¡ jω Rv 1 dt ¡¡ R RL Rv 2 dt¡ (8.1)calculándose el valor <strong>de</strong> la resistencia <strong>de</strong>l rotor como el cociente entre los vectores y y u,multiplicado por L R . El factor <strong>de</strong> correlación se calcula como el coseno <strong>de</strong>l ángulo entreestos dos vectores, que ha <strong>de</strong> ser uno si ambos vectores están relacionados exactamentepor un valor escalar (¡ R R£ L R ). Al <strong>de</strong>bilitar el campo la corriente <strong>de</strong> par aumenta, segúnse pue<strong>de</strong> observar en la figura 8.2, lo que hace que el estimador funcione mejor. Estamejora en la estimación se refleja en el aumento <strong>de</strong>l factor <strong>de</strong> correlación. Sin embargo,el estimador en realidad estima el cociente entre la resistencia y la inductancia <strong>de</strong> rotor¡ R R£ L R . Si cuando el motor trabaja a flujo nominal, el rotor está saturado, al <strong>de</strong>bilitar elcampo bajará la saturación, con lo cual la inductancia L R aumentará y en consecuencia elvalor estimado <strong>de</strong> la resistencia disminuirá.Conviene <strong>de</strong>stacar que para evitar que los errores en la estimación <strong>de</strong> la resistenciaperturben el funcionamiento <strong>de</strong>l controlador, en su implantación práctica sólo se hanactualizado los parámetros <strong>de</strong>l controlador en la zona en la que la estimación está mejorcondicionada: régimen permanente <strong>de</strong> la velocidad, flujo nominal y par mayor <strong>de</strong>l 50 %<strong>de</strong>l nominal.8.3. <strong>Control</strong> vectorial directoPara ilustrar las conclusiones obtenidas en el capítulo 5 sobre las similitu<strong>de</strong>s entreel controlador Lyapunov-Integral y el controlador vectorial directo, se han realizado unaserie <strong>de</strong> ensayos utilizando el controlador vectorial directo <strong>de</strong>sarrollado en el capítulo 5junto con los mismos controladores <strong>de</strong> corriente usados en el controlador Lyapunov-Integral, <strong>de</strong>sarrollados en el apéndice E. En la tabla 8.1 se muestran las ganancias <strong>de</strong>lcontrolador vectorial directo, las cuales se han elegido <strong>de</strong> modo que las constantes <strong>de</strong>tiempo en lazo cerrado sean las mismas que las <strong>de</strong>l controlador Lyapunov-Integral cuyosresultados se han mostrado en la sección 8.2. Al igual que en el controlador Lyapunov-Integral, tanto los reguladores <strong>de</strong> corriente como los <strong>de</strong> flujo y velocidad se implantancon un periodo <strong>de</strong> muestreo <strong>de</strong> 0¢ 5 ms.En la figura 8.6 se muestran los resultados <strong>de</strong> un ensayo realizado en las mismascondiciones que el <strong>de</strong>l controlador Lyapunov-Integral. Como se pue<strong>de</strong> apreciar si se
126 Resultados1.20.80.4ψ Restimado005101520253001500-150-3000510ω R 251520Figura 8.6: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialdirecto. Eje x en seg. Eje y en Wb y en rad el s.compara esta figura con la figura 8.1, el resultado obtenido con ambos controladoreses similar.Al igual que con el controlador Lyapunov-Integral, se ha realizado un ensayo cuandoel valor <strong>de</strong> la inercia usado para diseñar los controladores es igual a 0¢ 005kgr ¤ m 2 enlugar <strong>de</strong> 0¢ 01kgr¤ m 2 , que es el valor que se ha medido para la inercia <strong>de</strong>l accionamiento(Robertson, 1999). Las ganancias <strong>de</strong>l regulador <strong>de</strong> velocidad en este caso se muestranen la tabla 8.1. Los resultados obtenidos se muestran en la figura 8.7, en don<strong>de</strong> se pue<strong>de</strong>apreciar que el comportamiento es prácticamente el mismo que el observado en el controlLyapunov-Integral, salvo que en la zona entre t ¡ 18 s y t ¡ 20 s la perturbación obtenidacon este controlador es menor, tal como se pue<strong>de</strong> apreciar en el <strong>de</strong>talle <strong>de</strong> la figura 8.88.4. <strong>Control</strong> vectorial indirectoEl control vectorial indirecto, <strong>de</strong>sarrollado en el apéndice F, se usa frecuentementeen la industria <strong>de</strong>bido a su sencillez <strong>de</strong> implantación. Por tanto es conveniente averiguarsi los controladores propuestos en esta tesis ofrecen mejores prestaciones, ya que su implantaciónes bastante más compleja. Para ello, en esta sección se presentan una serie<strong>de</strong> ensayos realizados en las mismas condiciones que los mostrados en las dos seccionesanteriores. En la figura 8.9 se muestran 2 los resultados <strong>de</strong> un ensayo realizado en las mismascondiciones que los mostrados en las figuras 8.1 y 8.6, salvo que ahora el regulador<strong>de</strong> velocidad es más lento que en los ensayos con los controladores Lyapunov-Integral yvectorial directo. En concreto, las constantes <strong>de</strong> tiempo en lazo cerrado <strong>de</strong>l regulador <strong>de</strong>velocidad son ahora iguales a 250 ms y 40 ms, tal como se muestra en la tabla 8.2.2 Nótese que en la figura 8.9 se muestra ahora la evolución <strong>de</strong> la referencia <strong>de</strong>l flujo <strong>de</strong> rotor, en lugar <strong>de</strong>su valor estimado. Esto es <strong>de</strong>bido a que en el controlador indirecto la orientación al campo se realiza en bucleabierto y por tanto no se incluye un estimador <strong>de</strong> flujo <strong>de</strong> rotor en el controlador.
8.4 <strong>Control</strong> vectorial indirecto 1271.20.80.4ψ Restimado005101520253001500-150-3000510ω R 251520Figura 8.7: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialdirecto diseñado para J ¡ 0¢ 005kgr¤ m 2 Eje x en seg. Eje y en W b y en rad el s.i S242.521.510.50141618 20ω R (–) y ω Rr (- -)22320300280260240220141618202224Figura 8.8: Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial directo diseñado para J ¡ 0¢ 005kgr¤ m 2 .Eje x en seg. Eje y en A y en rad el s.Si se intenta aumentar la rapi<strong>de</strong>z <strong>de</strong> este controlador el sistema se vuelve inestableen los transitorios <strong>de</strong> velocidad <strong>de</strong>bido a que, al no existir un control <strong>de</strong>l flujo en lazocerrado, el sistema pier<strong>de</strong> la orientación al campo en estos transitorios. Como se pue<strong>de</strong>apreciar en la figura 8.9, el comportamiento dinámico <strong>de</strong> este controlador es algo peorque el ofrecido por los controladores Lyapunov-Integral y vectorial directo, sobretodocuando se aplica un par <strong>de</strong> carga, según pue<strong>de</strong> observarse en el <strong>de</strong>talle <strong>de</strong> la figura 8.10.
128 Resultados¡ 0¢ 01kgr¤<strong>Control</strong>ador Cte. dom. Cte. no dom. K P K IVel. (J m 2 ) 0,250 s 0,04 s 0,1441 0,4964Vel. (J ¡ 0¢ 005kgr¤ m 2 ) 0,250 s 0,04 s 0,0720 0,2482Cuadro 8.2: Constantes <strong>de</strong> tiempo en bucle cerrado y ganancias <strong>de</strong>l controlador vectorialindirecto. Los dos valores <strong>de</strong> J mostrados en la tabla son los valores <strong>de</strong> la inercia que sehan usado en el diseño <strong>de</strong> cada controlador.1.2ψ R r0.80.4005101520253001500-150-3000510ω R 251520Figura 8.9: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialindirecto. Eje x en seg. Eje y en W b y en rad el s.Nótese que ahora en el transitorio producido en t ¡ 18 s la perturbación que aparece en lavelocidad es bastante notable. A<strong>de</strong>más la corriente suministrada al motor en dicho transitorioalcanza un pico <strong>de</strong> aproximadamente 4,5 A, mucho mayor que los 2 A producidoscon los otros dos controladores. Por tanto, el uso <strong>de</strong> este controlador en accionamientosen los que se requiera un buen comportamiento dinámico no es aconsejable. Por último,conviene <strong>de</strong>stacar también el comportamiento oscilatorio <strong>de</strong> la corriente cuando se<strong>de</strong>bilita el campo a partir <strong>de</strong> t ¡ 22 s.Si se diseña el controlador <strong>de</strong> velocidad suponiendo que la inercia es J ¡ 0¢ 005kgr¤m 2 , el resultado obtenido es el mostrado en la figura 8.11, don<strong>de</strong> se pue<strong>de</strong> apreciar que elcomportamiento es mucho mejor que en el caso anterior. Ello es <strong>de</strong>bido a que, tal comopue<strong>de</strong> observarse en la tabla 8.2, al suponer que la inercia <strong>de</strong>l motor es la mitad <strong>de</strong> lareal; las ganancias obtenidas en el proceso <strong>de</strong> diseño <strong>de</strong>l controlador <strong>de</strong> velocidad sontambién la mitad, con lo cual el controlador será ahora menos enérgico. Según se apreciaen el <strong>de</strong>talle <strong>de</strong> la figura 8.12, el transitorio <strong>de</strong>l par <strong>de</strong> carga produce ahora una mayorperturbación en el control <strong>de</strong> velocidad que en el diseño para la inercia nominal. Sinembargo, en el transitorio <strong>de</strong> velocidad producido en t ¡ 18 s, <strong>de</strong>bido a que las ganancias<strong>de</strong>l controlador son ahora menores, el pico <strong>de</strong> corriente se reduce a 2,5 A, lo cual haceque el controlador salga antes <strong>de</strong> saturación. Se evita así una excesiva perturbación en el
8.4 <strong>Control</strong> vectorial indirecto 129i S24543210141618 20ω R (–) y ω Rr (- -)22320300280260240220141618202224Figura 8.10: Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial indirecto. Eje x en seg. Eje y en A y en rad el s.1.2ψ R r0.80.4005101520253001500-150-3000510ω R 251520Figura 8.11: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador vectorialindirecto diseñado para J ¡ 0¢ 005kgr¤ m 2 . Eje x en seg. Eje y en Wb y en rad el s.controlador <strong>de</strong> velocidad durante el transitorio, tal como ocurre cuando dicho controladorse diseña para inercia nominal.
¢130 Resultadosi S243210141618 20ω R (–) y ω Rr (- -)22320300280260240141618202224Figura 8.12: Evolución <strong>de</strong>l módulo <strong>de</strong> la corriente y <strong>de</strong>talle <strong>de</strong> la evolución <strong>de</strong> la velocidad(–) y su referencia (- -). <strong>Control</strong>ador vectorial indirecto diseñado para J ¡ 0¢ 005kgr¤ m 2 .Eje x en seg. Eje y en A y en rad el s.8.5. <strong>Control</strong>ador Lyapunov-Integral en modo generadorEn el <strong>de</strong>sarrollo <strong>de</strong>l controlador Lyapunov-Integral no se ha supuesto en ningún momentoque la máquina tenga que funcionar en modo motor. Por tanto, es <strong>de</strong> esperar quedicho controlador se comporte correctamente cuando la máquina funcione en modo generador.Para mostrar el comportamiento <strong>de</strong>l controlador en este modo <strong>de</strong> funcionamiento,se ha realizado un ensayo en el que se ha alimentado a la máquina <strong>de</strong> c. c. <strong>de</strong>l bancoexperimental mediante un rectificador controlado y se ha usado el controlador Lyapunov-Integral <strong>de</strong>sarrollado en esta tesis para regular la velocidad <strong>de</strong> la máquina <strong>de</strong> inducción.La referencia <strong>de</strong> velocidad <strong>de</strong> la máquina <strong>de</strong> inducción se ha situado en 250 rad el£ s y lareferencia <strong>de</strong> la máquina <strong>de</strong> c. c. se ha ajustado a un valor mayor, <strong>de</strong> forma que dichamáquina <strong>de</strong> c. c. aplique su par máximo. En la figura 8.13 se pue<strong>de</strong> apreciar la potenciagenerada por la máquina <strong>de</strong> inducción, 3 que se ha calculado según: 4P ¡ i s Sd us Sdi s Sq us Sq (8.2)Como se pue<strong>de</strong> observar, tras un transitorio inicial la máquina <strong>de</strong> inducción funciona enmodo generador, siendo la potencia generada <strong>de</strong> 151 W. La potencia consumida por lamáquina <strong>de</strong> c. c. es <strong>de</strong> 304 W.3 Para este experimento, dado que no se dispone <strong>de</strong> un inversor <strong>de</strong> cuatro cuadrantes en la conexión a red,se ha conectado una resistencia <strong>de</strong> frenado en el circuito intermedio <strong>de</strong>l inversor. De esta forma, la potenciagenerada por la máquina <strong>de</strong> inducción se disipa en esta resistencia.4 La transformada <strong>de</strong> Park usada en este trabajo es invariante en potencia.
8.6 <strong>Control</strong>ador Lyapunov-Integral con minimización <strong>de</strong> pérdidas 1314002000-200-40005101520Figura 8.13: Potencia consumida por la máquina <strong>de</strong> inducción. Eje x en seg. Eje y en W.8.6. <strong>Control</strong>ador Lyapunov-Integral con minimización <strong>de</strong>pérdidasEn los ensayos llevados a cabo con el controlador Lyapunov-Integral se ha <strong>de</strong>bilitadoel campo al final <strong>de</strong>l experimento para comprobar si el control <strong>de</strong> flujo <strong>de</strong> rotor y el <strong>de</strong>velocidad están <strong>de</strong>sacoplados. En (Fernán<strong>de</strong>z Bernal, 2000) se propone variar el módulo<strong>de</strong>l flujo <strong>de</strong> rotor para minimizar las pérdidas <strong>de</strong> la máquina. En esta sección se muestranlos resultados <strong>de</strong> aplicar una versión simplificada <strong>de</strong> una estrategia para minimizar laspérdidas óhmicas <strong>de</strong> la máquina propuesta en (Fernán<strong>de</strong>z Bernal, 2000) e implantadaen (Catalán Morrós, 2000) y que se resume en el apéndice G. Con esta aplicación seha verificado que controlador Lyapunov-Integral se comporta a<strong>de</strong>cuadamente cuando elmódulo <strong>de</strong>l flujo <strong>de</strong> rotor varía continuamente a lo largo <strong>de</strong>l ensayo.Los parámetros <strong>de</strong>l controlador son los mismos que los usados en la sección 8.2. Elvalor <strong>de</strong> λ i para el filtrado <strong>de</strong> la referencia <strong>de</strong> la corriente en eje d se ha elegido igual a0¢ 99833, con lo que la constante <strong>de</strong> tiempo <strong>de</strong>l filtro será igual a τ i ¡ 300ms. Los límites<strong>de</strong> saturación <strong>de</strong> la referencia <strong>de</strong> la corriente se han elegido iguales a 0¢ 95A para el límitesuperior y 0¢ 32A para el límite inferior, que se correspon<strong>de</strong>n con unos límites <strong>de</strong> 1¢ 2Wby 0¢ 4Wb para el flujo.Los resultados obtenidos se muestran el la figura 8.14. En el arranque se usa un controladorLyapunov-Integral para el flujo, que establece su valor en 1¢ 1Wb. A partir <strong>de</strong>t ¡ 2 s, se sustituye el controlador <strong>de</strong> flujo por la estrategia <strong>de</strong> mínimas pérdidas (ecuaciónG.4). Como se pue<strong>de</strong> observar, como en el instante <strong>de</strong> conexión <strong>de</strong> la estrategia <strong>de</strong> mínimaspérdidas el motor está trabajando en vacío, el valor <strong>de</strong>l flujo baja hasta 0¢ 8Wb,volviendo a subir a su valor nominal cada vez que es necesario proporcionar más pardurante los transitorios. A partir <strong>de</strong> t ¡ 15 s se conecta la máquina <strong>de</strong> continua, siendo lapotencia generada por ésta igual a 133 W. Como se pue<strong>de</strong> observar, al aumentar el par
132 Resultados1.20.80.4ψ Restimado005101520253001500-150-3000510ω R 251520Figura 8.14: Evolución <strong>de</strong> las salidas (–) y sus referencias (- -). <strong>Control</strong>ador Lyapunov-Integral con minimización <strong>de</strong> pérdidas. Eje x en seg. Eje y en W b y en rad el s.Sin optimización <strong>de</strong> pérdidas Con optimización <strong>de</strong> pérdidasVacío 257,6 W 225,5 WCarga 481 W 485 WCuadro 8.3: Potencia consumida por el accionamiento.motor <strong>de</strong> la máquina, el flujo se sitúa en su valor nominal.Para evaluar la mejora en el rendimiento cuando se aplica la estrategia <strong>de</strong> minimización<strong>de</strong> pérdidas, se ha medido la potencia que consume el accionamiento. Estamedida se ha realizado midiendo la corriente y la tensión en el circuito <strong>de</strong> continua <strong>de</strong>linversor. La medida <strong>de</strong> corriente se ha realizado mediante una sonda <strong>de</strong> efecto hall conectadaa un osciloscopio digital, en el que se ha calculado el valor RMS <strong>de</strong> la forma <strong>de</strong> ondaobtenida. La principal ventaja <strong>de</strong> este método, aparte <strong>de</strong> su facilidad <strong>de</strong> implantación, esque tiene en cuenta las posibles variaciones en las pérdidas <strong>de</strong> conmutación <strong>de</strong>l inversor.Sin embargo, <strong>de</strong>bido a que la forma <strong>de</strong> onda <strong>de</strong> la corriente presenta un gran contenido <strong>de</strong>armónicos provocados por el rectificador, los resultados obtenidos no son muy precisos.La potencia absorbida por el accionamiento, tanto con la estrategia <strong>de</strong> minimización <strong>de</strong>pérdidas como sin ella se muestra en la tabla 8.3. Como se pue<strong>de</strong> observar, en vacío seproduce un ahorro <strong>de</strong> un 12,5 % <strong>de</strong> potencia. Sin embargo cuando se conecta la dinamo 5se consume un 0,8 % más <strong>de</strong> potencia.5 La potencia generada por la dinamo es la misma que en los <strong>de</strong>más ensayos: 133 W.
8.7 Conclusiones 1338.7. ConclusionesEn este capítulo se ha mostrado la viabilidad <strong>de</strong> algunos <strong>de</strong> los controladores propuestosen esta tesis mediante su aplicación en un banco <strong>de</strong> ensayos. De hecho, ha sidoaquí don<strong>de</strong> se ha aplicado por primera vez en un banco experimental el conjuntoregulador Lyapunov-Integral, estimador <strong>de</strong> flujo y estimador <strong>de</strong> resistencia <strong>de</strong> rotor. Seha mostrado que el comportamiento <strong>de</strong>l controlador Lyapunov-Integral es prácticamenteigual al controlador vectorial directo, <strong>de</strong> acuerdo con lo predicho en la sección 5.4. Sinembargo, cuando existen errores en la inercia, el comportamiento <strong>de</strong>l controlador vectorialdirecto es marginalmente mejor. Esto es <strong>de</strong>bido a que en este último caso, según se hadiscutido en la sección 5.4, el valor <strong>de</strong> la inercia se tiene en cuenta en el diseño <strong>de</strong>l controladorlineal <strong>de</strong> velocidad, en lugar <strong>de</strong> cancelar su valor como ocurre en el controladorLyapunov-Integral.También se ha mostrado que las prestaciones <strong>de</strong> ambos controladores cuando se precisauna gran respuesta dinámica <strong>de</strong>l accionamiento son bastante mejores que las ofrecidaspor el controlador vectorial indirecto. En los resultados mostrados se pue<strong>de</strong> observarque con los controladores vectorial directo y Lyapunov-Integral se consiguen transitorioscon aceleración gran<strong>de</strong> que no son posibles con el controlador vectorial indirecto.A<strong>de</strong>más, el valor <strong>de</strong> pico <strong>de</strong> la corriente <strong>de</strong> estator durante estos transitorios es muchomayor cuando se usa el controlador vectorial indirecto que cuando se usan el controladorLyapunov-Integral o el vectorial directo. Por tanto, la aplicación <strong>de</strong>l controlador vectorialindirecto sólo es aconsejable en aquellos accionamientos en los que no se requiera unaexcesiva rapi<strong>de</strong>z <strong>de</strong> respuesta. En el caso contrario, la mayor complejidad computacional<strong>de</strong> los reguladores Lyapunov-Integral y vectorial directo estará más que justificada.Para terminar se han mostrado dos aplicaciones <strong>de</strong>l regulador Lyapunov-Integral.En la primera se ha usado la máquina <strong>de</strong> inducción en modo generador, obteniéndoseun resultado satisfactorio. Conviene <strong>de</strong>stacar que el regulador es idéntico al usado conla máquina funcionando en modo motor. En la segunda se ha eliminado el reguladorLyapunov-Integral <strong>de</strong> flujo, calculándose la referencia <strong>de</strong> la corriente en eje d a partir <strong>de</strong>una estrategia <strong>de</strong> mínimas pérdidas óhmicas, observándose también un funcionamientosatisfactorio.
134 Resultados
Capítulo 9Conclusiones, aportaciones ysugerenciasEn esta tesis se ha realizado un estudio exhaustivo <strong>de</strong> varias técnicas <strong>de</strong> control nolineal cuando se aplican a la máquina <strong>de</strong> inducción, comparándose entre sí los resultadosobtenidos y se ha propuesto un nuevo controlador no lineal robusto y viable en tiempodiscreto. También se ha estudiado la aplicación <strong>de</strong> varios estimadores y observadores <strong>de</strong>flujo <strong>de</strong> rotor propuestos en la literatura, <strong>de</strong>scubriéndose que el comportamiento <strong>de</strong> estosúltimos pue<strong>de</strong> ser problemático cuando se produce un cambio <strong>de</strong> sentido <strong>de</strong> giro conaceleración gran<strong>de</strong> en máquinas <strong>de</strong> baja inercia. A<strong>de</strong>más, los resultados obtenidos conalgunos <strong>de</strong> los controladores estudiados se han validado experimentalmente.En este último capítulo se resumen las conclusiones obtenidas en este trabajo, así comolas principales aportaciones <strong>de</strong>l mismo. Cierra el capítulo un apartado <strong>de</strong> sugerenciaspara futuras líneas <strong>de</strong> trabajo.9.1. Resumen y conclusionesEl objetivo principal <strong>de</strong> esta tesis ha sido el evaluar la aplicación práctica a la máquina<strong>de</strong> inducción <strong>de</strong> varias técnicas <strong>de</strong> control no lineal. A<strong>de</strong>más, las <strong>de</strong>ficiencias encontradasen las técnicas propuestas en la literatura han motivado el <strong>de</strong>sarrollo <strong>de</strong>l controladorLyapunov-Integral, que es una aportación original <strong>de</strong> esta tesis.En el capítulo 2 se ha estudiado la aplicación <strong>de</strong> un controlador mediante linealizaciónentrada-salida al motor <strong>de</strong> inducción. Esta técnica <strong>de</strong> control, si bien ha sido aplicada ala máquina <strong>de</strong> inducción en numerosos trabajos, en la mayoría <strong>de</strong> ellos sólo se ha evaluadosu comportamiento mediante simulación en tiempo continuo, obteniéndose resultadosmuy prometedores. Sin embargo, las pocas aplicaciones prácticas en tiempo discreto quese encuentran en la literatura (Raumer et al., 1994) muestran un comportamiento similaral controlador vectorial indirecto, siendo necesario introducir una serie <strong>de</strong> modificacionesad-hoc al controlador para conseguir que éste funcione. Conviene <strong>de</strong>stacar que esta comparaciónno tiene mucho sentido, ya que el controlador vectorial indirecto tiene una estructuraen lazo abierto, <strong>de</strong> una gran simplicidad; mientras que el controlador mediantelinealización entrada-salida es un controlador no lineal <strong>de</strong> una complejidad elevada. Una
136 Conclusiones, aportaciones y sugerenciascomparación con un controlador vectorial directo habría ofrecido resultados más interesantes.A<strong>de</strong>más, según se ha <strong>de</strong>mostrado en esta tesis, el comportamiento dinámico <strong>de</strong>lcontrolador vectorial indirecto es muy pobre. Por tanto no tiene sentido aplicar un controladormediante linealización entrada-salida para obtener las mismas prestaciones quecon el regulador vectorial indirecto.En el estudio llevado a cabo en esta tesis se ha aplicado la linealización entradasalidaa una máquina <strong>de</strong> inducción mo<strong>de</strong>lada en ejes <strong>de</strong> estator y en ejes <strong>de</strong> flujo <strong>de</strong> rotorcon vistas a su implantación práctica en un banco <strong>de</strong> ensayos. Se ha <strong>de</strong>mostrado quela aplicación en tiempo discreto en ejes <strong>de</strong> flujo <strong>de</strong> rotor es más ventajosa, aunque sóloofrece resultados aceptables cuando la frecuencia <strong>de</strong> muestreo es suficientemente elevada(superior a 10 kHz).En el capítulo 3 se ha aplicado otra técnica <strong>de</strong> control no lineal, la cual se basa en<strong>de</strong>finir una función <strong>de</strong> Lyapunov <strong>de</strong> los errores <strong>de</strong> seguimiento <strong>de</strong> las salidas. El uso <strong>de</strong>una función <strong>de</strong> Lyapunov garantiza la estabilidad <strong>de</strong>l sistema, al menos en la aplicaciónen tiempo continuo. Por otro lado, este tipo <strong>de</strong> controlador obliga a usar un inversorfuente <strong>de</strong> tensión controlado en corriente. En dicho capítulo se <strong>de</strong>muestra que el controladorpresenta un comportamiento aceptable, incluso cuando se aplica en tiempo discretocon bajas frecuencias <strong>de</strong> muestreo (<strong>de</strong>l or<strong>de</strong>n <strong>de</strong> 1 kHz). Sin embargo, aunque a primeravista la mejora en el comportamiento pue<strong>de</strong> parecer que es <strong>de</strong>bida al uso <strong>de</strong> una función<strong>de</strong> Lyapunov, en el capítulo 3 se ha <strong>de</strong>mostrado que el controlador diseñado es igual a uncontrolador mediante linealización entrada-salida en el que se use también un inversorfuente <strong>de</strong> tensión controlado en corriente, en lugar <strong>de</strong> un inversor fuente <strong>de</strong> tensión comose hizo en el capítulo 2. El uso <strong>de</strong> este tipo <strong>de</strong> inversor elimina la dinámica <strong>de</strong>l estator<strong>de</strong>l mo<strong>de</strong>lo <strong>de</strong>l motor, con lo que la realimentación no lineal realizada por el controladores mucho más simple y su aplicación en tiempo discreto resulta ser menos sensible alos efectos <strong>de</strong>l muestreo. Por último, conviene <strong>de</strong>stacar que <strong>de</strong>bido a que este tipo <strong>de</strong>controladores se basan en cancelar todos los términos <strong>de</strong> las ecuaciones <strong>de</strong> estado <strong>de</strong>la máquina, 1 su comportamiento ha resultado ser muy sensible a los parámetros <strong>de</strong> lamáquina, especialmente en accionamientos <strong>de</strong> baja inercia, en los que se producen errores<strong>de</strong> seguimiento elevados en régimen permanente. Sin embargo, se ha <strong>de</strong>mostradoteóricamente que la estabilidad <strong>de</strong>l sistema en estos casos está garantizada, siempre ycuando el error <strong>de</strong> mo<strong>de</strong>lado sea constante.En el capítulo 4 se ha <strong>de</strong>sarrollado una mejora al controlador <strong>de</strong> Lyapunov presentadoen el capítulo 3, que consigue eliminar los errores <strong>de</strong> seguimiento en régimen permanenteproducidos por los errores en el mo<strong>de</strong>lado <strong>de</strong>l sistema. La mejora consiste en añadir a lafunción <strong>de</strong> Lyapunov una integral <strong>de</strong> los errores <strong>de</strong> seguimiento, siguiendo las i<strong>de</strong>as <strong>de</strong>lcontrol lineal clásico. El hecho <strong>de</strong> introducir una integral en la función <strong>de</strong> Lyapunov haobligado a diseñar una estrategia <strong>de</strong> anti-windup para evitar que las saturaciones en elmando hagan inestable al controlador. La estrategia diseñada tiene en cuenta que el sistematiene varias entradas y varias salidas, <strong>de</strong> forma que la saturación <strong>de</strong> una <strong>de</strong> ellasno perturbe excesivamente a las <strong>de</strong>más. Se ha <strong>de</strong>mostrado también que la aplicación <strong>de</strong>lcontrolador propuesto a la máquina <strong>de</strong> inducción cuando se producen errores en el mo<strong>de</strong>lado<strong>de</strong> los parámetros <strong>de</strong> la carga es estable. Sin embargo, la respuesta dinámica <strong>de</strong>lsistema en lazo cerrado <strong>de</strong>pen<strong>de</strong> <strong>de</strong>l error <strong>de</strong> mo<strong>de</strong>lado cometido en dichos parámetros,1 Con esto se consigue que el sistema en lazo cerrado evolucione según una dinámica preestablecida.
9.1 Resumen y conclusiones 137sobre todo en la inercia. Por último, las simulaciones realizadas han mostrado una notablemejora en el comportamiento <strong>de</strong>l accionamiento respecto a las ofrecidas por el controlador<strong>de</strong> Lyapunov <strong>de</strong>sarrollado en el capítulo 3; obteniéndose ahora un controlador conuna excelente respuesta dinámica, error nulo en régimen permanente y una gran robustezfrente a errores en el mo<strong>de</strong>lado <strong>de</strong> los parámetros <strong>de</strong> la carga.En el capítulo 5 se ha implantado un controlador vectorial directo clásico, pero siguiendola misma estructura que la utilizada para el controlador Lyapunov-Integral, con elobjetivo <strong>de</strong> po<strong>de</strong>r comparar sus prestaciones. Para ello, el controlador vectorial directo seha implantado usando el mismo inversor fuente <strong>de</strong> tensión controlado en corriente que elusado para el controlador Lyapunov-Integral. A<strong>de</strong>más, en las simulaciones realizadas seha diseñado el controlador <strong>de</strong> forma que sus constantes <strong>de</strong> tiempo en lazo cerrado seanlas mismas que las utilizadas en el controlador Lyapunov-Integral. Los resultados <strong>de</strong> simulaciónobtenidos han sido prácticamente iguales a los proporcionados por el controladorLyapunov-Integral. Un análisis en <strong>de</strong>talle <strong>de</strong> las ecuaciones <strong>de</strong> cada uno <strong>de</strong> estos controladoresrevela que su estructura es muy parecida. Sin embargo el controlador Lyapunov-Integral se basa en cancelar todos los términos <strong>de</strong> las ecuaciones <strong>de</strong> estado, <strong>de</strong> forma queel sistema en lazo cerrado evolucione según una dinámica preestablecida. Por otro lado,el controlador vectorial directo sólo cancela el término no lineal presente en la ecuación<strong>de</strong>l par, diseñándose un regulador lineal PI en tiempo discreto para situar los polos <strong>de</strong>lsistema lineal resultante en el lugar <strong>de</strong>seado. Con esta segunda aproximación el controladores más robusto frente a errores en los parámetros y a los efectos <strong>de</strong> la implantaciónen tiempo discreto. De hecho, se ha comprobado mediante simulación que si la inercia<strong>de</strong> la máquina es la décima parte <strong>de</strong> la <strong>de</strong>l mo<strong>de</strong>lo, el controlador Lyapunov-Integral esinestable, mientras que el controlador vectorial directo es estable.Los controladores implantados en los capítulos 2, 3, 4 y 5 necesitan conocer el móduloy el ángulo <strong>de</strong>l vector <strong>de</strong> flujo <strong>de</strong> rotor. Como la medida <strong>de</strong> dicho vector es muydifícil <strong>de</strong> realizar en la práctica, es necesario recurrir al uso <strong>de</strong> estimadores para conocersu valor. En el capítulo 6 se han presentado una serie <strong>de</strong> estimadores y observadores <strong>de</strong>lvector <strong>de</strong> flujo <strong>de</strong> rotor y se han evaluado sus prestaciones cuando se integran con uncontrolador Lyapunov-Integral mediante simulación. En primer lugar se han estudiadodos estimadores en lazo abierto: uno en ejes <strong>de</strong> flujo <strong>de</strong> rotor y otro en ejes <strong>de</strong> estator.Ambos se basan en simular las ecuaciones dinámicas <strong>de</strong> la máquina, por lo que su velocidad<strong>de</strong> convergencia es limitada y son muy sensibles a errores en los parámetros <strong>de</strong> lamáquina. La ventaja <strong>de</strong>l primero radica en su simplicidad computacional, aunque, <strong>de</strong>bidoa que es un estimador no lineal, su discretización no pue<strong>de</strong> realizarse exactamente. Encambio, el estimador en ejes <strong>de</strong> estator, aunque presenta una mayor carga computacional,pue<strong>de</strong> ser discretizado exactamente siempre y cuando la velocidad varíe muy lentamente,<strong>de</strong> forma que pueda consi<strong>de</strong>rarse como un parámetro <strong>de</strong>l sistema lineal. Se han realizadouna serie <strong>de</strong> simulaciones en tiempo discreto, <strong>de</strong>scubriéndose que la mejora obtenidaal utilizar el estimador en ejes <strong>de</strong> estator no es muy apreciable, por lo que pue<strong>de</strong> estarjustificado el uso <strong>de</strong>l estimador en ejes <strong>de</strong> flujo <strong>de</strong> rotor si el controlador ha <strong>de</strong> implantarseen un microcontrolador <strong>de</strong> bajas prestaciones. También se ha verificado mediantesimulación que ambos estimadores son muy sensibles a las variaciones <strong>de</strong> la resistencia<strong>de</strong> rotor, aunque sólo se cometen errores apreciables en la estimación durante el régimentransitorio <strong>de</strong> la máquina. Para mejorar el comportamiento <strong>de</strong> estos estimadores se ha im-
138 Conclusiones, aportaciones y sugerenciasplantado un estimador <strong>de</strong> la resistencia <strong>de</strong> rotor. Sin embargo, este estimador sólo ofreceresultados fiables cuando el motor está en régimen permanente y el valor <strong>de</strong> la corrienteque circula por el rotor es suficientemente elevado. Dado que el valor <strong>de</strong> la resistencia<strong>de</strong> rotor varía lentamente durante el funcionamiento <strong>de</strong>l accionamiento, en este trabajosólo se ha utilizado el valor estimado <strong>de</strong> la resistencia <strong>de</strong>l rotor cuando dicho valores fiable, obteniéndose buenos resultados. Conviene <strong>de</strong>stacar que aunque este estimador<strong>de</strong> resistencia se propuso originalmente en (Zamora Macho, 1997), es aquí don<strong>de</strong> se haaplicado por primera vez en tiempo real <strong>de</strong>ntro <strong>de</strong> un sistema <strong>de</strong> control en lazo cerrado.El segundo estimador estudiado en el capítulo 6 consiste en un diseño conjunto <strong>de</strong>un controlador Lyapunov-Integral junto con un estimador en ejes <strong>de</strong> flujo <strong>de</strong> rotor, en elque el controlador obliga a que una función <strong>de</strong> los errores <strong>de</strong> seguimiento, sus integralesy el error <strong>de</strong> estimación sea <strong>de</strong> Lyapunov. De esta manera se garantiza la convergenciaa cero <strong>de</strong> los errores <strong>de</strong> seguimiento y <strong>de</strong> estimación. Sin embargo, se ha <strong>de</strong>mostradomediante simulación que las prestaciones <strong>de</strong> este controlador, cuando se implanta entiempo discreto, son peores que las obtenidas por el controlador Lyapunov-Integral juntocon el estimador en ejes <strong>de</strong> flujo mostrado en la primera parte <strong>de</strong>l capítulo 6; llegandoincluso a ser inestable bajo ciertas condiciones.Por último se ha <strong>de</strong>sarrollado un observador en lazo cerrado <strong>de</strong> or<strong>de</strong>n reducido. Seha <strong>de</strong>mostrado que la realimentación <strong>de</strong>l observador necesita el cálculo <strong>de</strong> la <strong>de</strong>rivada<strong>de</strong> la corriente o realizar un cambio <strong>de</strong> variable que <strong>de</strong>pen<strong>de</strong> <strong>de</strong> la velocidad, por lo quesu aplicación sólo pue<strong>de</strong> ser realizada cuando la variación <strong>de</strong> la velocidad durante elperiodo <strong>de</strong> muestreo sea <strong>de</strong>spreciable. Mediante simulación se ha <strong>de</strong>mostrado que esteobservador con el cambio <strong>de</strong> variable propuesto en la literatura es inestable cuando seproduce un cambio <strong>de</strong> sentido <strong>de</strong> giro con alta aceleración. Para evitar este problema se hapropuesto aquí una implantación en tiempo discreto <strong>de</strong>l observador en el que no es precisorealizar ningún cambio <strong>de</strong> variable para su realimentación. Se ha <strong>de</strong>mostrado mediantesimulación que el comportamiento <strong>de</strong> este nuevo observador es correcto, incluso en lostransitorios con aceleración gran<strong>de</strong>.En el capítulo 7 se ha <strong>de</strong>scrito el banco <strong>de</strong> ensayos utilizado para validar los resultados<strong>de</strong> esta tesis. Se ha <strong>de</strong>mostrado que el uso <strong>de</strong> un PC estándar para implantar loscontroladores en un laboratorio <strong>de</strong> investigación es una alternativa viable frente al uso<strong>de</strong> sistemas basados en un DSP o un microcontrolador, que es lo más común en la literatura.Las principales ventajas <strong>de</strong> usar un PC son: (a) una amplia disponibilidad <strong>de</strong>lhardware con gran potencia <strong>de</strong> cálculo y bajo precio (b) gran capacidad en disco duropara almacenar los resultados <strong>de</strong> los ensayos y (c) un bajo coste <strong>de</strong>l software <strong>de</strong> <strong>de</strong>sarrollo,especialmente si se usan herramientas bajo licencia GNU. Precisamente en esta tesisse ha <strong>de</strong>mostrado que es posible construir un sistema <strong>de</strong> control usando casi exclusivamenteherramientas <strong>de</strong> software libre. Con la excepción <strong>de</strong>l software utilizado para eldiseño <strong>de</strong> la FPGA, el cual es un software propietario suministrado por el propio fabricante<strong>de</strong> la FPGA; todo el resto <strong>de</strong>l software utilizado en el <strong>de</strong>sarrollo <strong>de</strong> esta tesis hasido software libre. Como sistema operativo se ha usado Debian GNU-Linux, con la extensiónRT-Linux para po<strong>de</strong>r ejecutar los controladores en tiempo real. Para el diseño <strong>de</strong>los controladores y la visualización <strong>de</strong> los resultados se ha utilizado el paquete Octave,el cual es “pseudo-compatible” con Matlab. Las simulaciones llevadas a cabo se han realizadocon Gnans (Mårtensson, 1994), cuya principal ventaja radica en que es capaz <strong>de</strong>
9.1 Resumen y conclusiones 139traducir las ecuaciones <strong>de</strong>l mo<strong>de</strong>lo a lenguaje C, las cuales son compiladas y enlazadasdinámicamente al programa, ejecutándose durante la simulación con la velocidad <strong>de</strong> unprograma compilado. La velocidad <strong>de</strong> simulación conseguida con esta aproximación esvarios or<strong>de</strong>nes <strong>de</strong> magnitud superior a la <strong>de</strong> una simulación en la que las ecuaciones <strong>de</strong>lmo<strong>de</strong>lo son interpretadas durante la simulación, como ocurre por ejemplo con Simulink.Por último, este documento ha sido escrito con Emacs y compuesto con LATEX (Lamport,1994).Conviene también <strong>de</strong>stacar que para po<strong>de</strong>r usar un PC estándar para controlar el accionamientoha sido necesario <strong>de</strong>sarrollar una tarjeta para el bus ISA que permita controlarel inversor y medir la posición <strong>de</strong>l eje <strong>de</strong>l motor a través <strong>de</strong> un enco<strong>de</strong>r incremental.Esta tarjeta está basada en una FPGA, lo cual dota al circuito <strong>de</strong> una gran flexibilidad,imprescindible en un entorno <strong>de</strong> investigación. A<strong>de</strong>más el uso <strong>de</strong> una FPGA en lugar <strong>de</strong>componentes discretos <strong>de</strong> baja escala <strong>de</strong> integración ayuda a reducir en gran medida elespacio ocupado por la placa <strong>de</strong> circuito impreso.Finalmente, en el capítulo 8 se muestran los resultados obtenidos en el banco <strong>de</strong> ensayos<strong>de</strong>scrito en el capítulo 7. En dicho banco se ha ensayado un controlador Lyapunov-Integral y un controlador vectorial directo, obteniéndose prácticamente los mismos resultados,tal como se ha predicho en el capítulo 5. Sin embargo, el comportamiento<strong>de</strong>l controlador vectorial directo ha sido mejor que el <strong>de</strong>l controlador Lyapunov-Integralcuando se usa un valor erróneo <strong>de</strong> la inercia <strong>de</strong>l accionamiento en el diseño <strong>de</strong> los controladores;<strong>de</strong> acuerdo con lo predicho en el capítulo 5. También se ha <strong>de</strong>mostrado que elcomportamiento dinámico <strong>de</strong> estos dos controladores es muy superior al ofrecido por elcontrolador vectorial indirecto, aunque este último presenta una menor complejidad <strong>de</strong>implantación, por lo que su uso en aplicaciones en las que no se requiera un excelentecomportamiento dinámico pue<strong>de</strong> estar justificado.También se ha evaluado <strong>de</strong> forma experimental por primera vez el comportamiento<strong>de</strong>l estimador <strong>de</strong> resistencia <strong>de</strong> rotor propuesto en el capítulo 6, ya que en (Zamora Macho,1997) sólo se ejecutó el algoritmo en batch, es <strong>de</strong>cir, sin implantarse en tiempo real<strong>de</strong>ntro <strong>de</strong> un lazo <strong>de</strong> control. Se ha confirmado que el estimador sólo ofrece resultadosfiables cuando el motor está en régimen permanente y la corriente que circula por el rotores apreciable. A<strong>de</strong>más se ha <strong>de</strong>scubierto que el error cometido en la estimación <strong>de</strong> laresistencia <strong>de</strong> rotor aumenta cuando se <strong>de</strong>bilita el campo en el motor, lo cual es <strong>de</strong>bido aque el estimador propuesto en realidad obtiene la constante <strong>de</strong> tiempo <strong>de</strong>l rotor (R R£ L R )a partir <strong>de</strong> las medidas <strong>de</strong> corriente y tensión en la máquina. El valor <strong>de</strong> R R se obtiene portanto multiplicando la constante <strong>de</strong> tiempo <strong>de</strong>l rotor estimada por el valor <strong>de</strong> la inductancia<strong>de</strong> rotor L R . En consecuencia, si se satura el rotor el valor <strong>de</strong> L R variará, y por tantotambién lo hará el valor <strong>de</strong> la estimación <strong>de</strong> la resistencia <strong>de</strong>l rotor ˆR R .Finalmente, para <strong>de</strong>mostrar el comportamiento <strong>de</strong>l controlador Lyapunov-Integralpropuesto en otras situaciones, se ha realizado un ensayo con la máquina funcionandoen modo generador y otro en el que se ha aplicado una estrategia <strong>de</strong> minimización<strong>de</strong> pérdidas óhmicas, observándose un buen comportamiento en ambos casos. Conviene<strong>de</strong>stacar que en todos los ensayos realizados no se ha puesto un especial cuidado ni en lacalibración <strong>de</strong> las sondas ni en la extracción <strong>de</strong> los parámetros <strong>de</strong>l accionamiento, lo cuales una muestra <strong>de</strong> la robustez <strong>de</strong> los controladores propuestos
140 Conclusiones, aportaciones y sugerencias9.2. Aportaciones originalesLas principales aportaciones <strong>de</strong> esta tesis han sido:Se ha <strong>de</strong>mostrado que la aplicación <strong>de</strong> un controlador mediante linealización exactaentrada-salida no es aplicable a la máquina <strong>de</strong> inducción, <strong>de</strong>bido a que el altoperiodo <strong>de</strong> muestreo necesario para su implantación en tiempo discreto no es admisiblecon los semiconductores <strong>de</strong> potencia y los microprocesadores existentes enla actualidad.Se ha evaluado un controlador basado en una función <strong>de</strong> Lyapunov <strong>de</strong> los errores<strong>de</strong> seguimiento <strong>de</strong> las salidas y se ha <strong>de</strong>mostrado que aunque su comportamientoes aceptable cuando se implanta en tiempo discreto con periodos <strong>de</strong> muestreo bajos,presenta gran<strong>de</strong>s errores en régimen permanente cuando existen errores en losparámetros <strong>de</strong> la carga. A<strong>de</strong>más se ha <strong>de</strong>mostrado que este controlador es equivalentea un controlador mediante linealización entrada-salida en el que se use uninversor fuente <strong>de</strong> tensión controlado en corriente, por lo que la mejora <strong>de</strong> lasprestaciones es <strong>de</strong>bida a la simplificación <strong>de</strong>l mo<strong>de</strong>lo <strong>de</strong>l motor en lugar <strong>de</strong> al uso<strong>de</strong> la función <strong>de</strong> Lyapunov.Se ha propuesto una mejora al controlador <strong>de</strong> Lyapunov, basada en añadir unaintegral <strong>de</strong> los errores <strong>de</strong> seguimiento a la función <strong>de</strong> Lyapunov. Se ha <strong>de</strong>mostradoque este nuevo controlador, <strong>de</strong>nominado Lyapunov-Integral, es robusto frente aerrores en los parámetros, obteniéndose un error nulo en régimen permanente ensu aplicación en tiempo discreto con periodos <strong>de</strong> muestreo <strong>de</strong> 1 ms.Se ha comparado el controlador Lyapunov-Integral propuesto con el controladorvectorial directo, <strong>de</strong>mostrándose que ambos controladores son muy similares, sibien el controlador Lyapunov-Integral se basa en cancelar todos los términos <strong>de</strong>lmo<strong>de</strong>lo <strong>de</strong> la máquina <strong>de</strong> inducción, mientras que el controlador vectorial directosólo cancela los términos no lineales <strong>de</strong>l mo<strong>de</strong>lo, aplicando técnicas <strong>de</strong> controllineal en tiempo discreto para obtener la respuesta <strong>de</strong>seada <strong>de</strong>l accionamiento. Elresultado es que el controlador vectorial directo es menos sensible frente a variaciones<strong>de</strong> los parámetros y a los efectos <strong>de</strong>l muestreo que el controlador Lyapunov-Integral.Se ha <strong>de</strong>mostrado que el diseño conjunto <strong>de</strong>l estimador junto con el controlador <strong>de</strong>Lyapunov propuesto en (Marino et al., 1996) no funciona en tiempo discreto conbajas frecuencias <strong>de</strong> muestreo (1 kHz), pudiendo llegar a ser inestable.Se ha <strong>de</strong>mostrado que el observador <strong>de</strong> or<strong>de</strong>n reducido con el cambio <strong>de</strong> variablepropuesto en (Verghese y San<strong>de</strong>rs, 1988) es inestable en los cambios <strong>de</strong> sentido<strong>de</strong> giro con aceleración gran<strong>de</strong>. Para solucionar este problema se ha propuesto unaimplantación en tiempo discreto en la que no es necesario realizar dicho cambio<strong>de</strong> variable y que ofrece buenos resultados incluso en los transitorios con alta aceleración.Se ha <strong>de</strong>mostrado que el uso <strong>de</strong> un PC estándar es una alternativa viable paraimplantar un sistema <strong>de</strong> control <strong>de</strong> altas prestaciones. A<strong>de</strong>más el uso <strong>de</strong> softwarelibre hace que el coste <strong>de</strong>l sistema sea muy bajo.
9.3 Sugerencias para futuros trabajos 141Se ha propuesto el uso <strong>de</strong> una FPGA para implementar la temporización <strong>de</strong> losinterruptores <strong>de</strong>l inversor y para contar los pulsos <strong>de</strong>l enco<strong>de</strong>r, <strong>de</strong>mostrándose quesu uso es muy ventajoso gracias a la flexibilidad obtenida y al consi<strong>de</strong>rable ahorro<strong>de</strong> espacio en la placa <strong>de</strong> circuito impreso.Se ha aplicado experimentalmente en un banco <strong>de</strong> ensayos un controlador no linealjunto con un estimador <strong>de</strong> flujo y el estimador <strong>de</strong> resistencia <strong>de</strong> rotor propuesto en(Zamora Macho, 1997), <strong>de</strong>mostrándose el buen comportamiento <strong>de</strong>l sistema enlazo cerrado.Se ha mostrado el comportamiento <strong>de</strong>l controlador Lyapunov-Integral propuestocon la máquina funcionando en modo generador y cuando se utiliza una estrategia<strong>de</strong> mínimas pérdidas óhmicas.9.3. Sugerencias para futuros trabajosEn esta tesis se han aplicado cuatro estrategias <strong>de</strong> control no lineal a la máquina<strong>de</strong> inducción, haciendo especial énfasis en su implantación en tiempo discreto con bajasfrecuencias <strong>de</strong> muestreo. Sin embargo existen otras estrategias <strong>de</strong> control que no sehan abordado en este trabajo, pero que sería interesante evaluar y comparar con el controladorvectorial directo. Entre ellas cabe <strong>de</strong>stacar el control directo <strong>de</strong> par o DTC 2(Vas, 1998), control <strong>de</strong> estructura variable (Shyu y Shieh, 1995), control robusto (Zhou yDoyle, 1998), control por pasividad (Ortega y Espinosa, 1993) (Gök<strong>de</strong>re y Simaan, 1997)y controladores basados en técnicas <strong>de</strong> inteligencia artificial: controladores fuzzy (Cerrutoet al., 1997) y controladores con re<strong>de</strong>s neuronales (Shyu et al., 1998). Para obtenerresultados coherentes al comparar los controladores, éstos <strong>de</strong>berían <strong>de</strong> implantarse enigualdad <strong>de</strong> condiciones y sin preferencias preestablecidas, tal como se ha realizado enesta tesis.Otro posible campo <strong>de</strong> investigación sería la aplicación <strong>de</strong>l controlador Lyapunov-Integral a otro tipo <strong>de</strong> máquinas eléctricas como por ejemplo motores síncronos <strong>de</strong> reluctanciao <strong>de</strong> imanes permanentes.Los controladores estudiados en esta tesis se han implantado en coma flotante parasimplificar su aplicación práctica. Sería importante aplicar el controlador Lyapunov-Integral en un microcontrolador o en un DSP <strong>de</strong> 16 bits <strong>de</strong> bajo coste, con vistas aevaluar sus prestaciones cuando se implanta en coma fija. A<strong>de</strong>más podría usarse parala implantación un 80C166 <strong>de</strong> Infineon Technologies o un TMS320F2407 <strong>de</strong> Texas Instruments,los cuales tienen integrado un sistema <strong>de</strong> modulación PWM trifásico y unconversor A/D <strong>de</strong> varios canales, simplificándose así el hardware necesario.En este trabajo se ha <strong>de</strong>mostrado que el estimador <strong>de</strong> resistencia <strong>de</strong> rotor propuestoen realidad se basa en estimar la constante <strong>de</strong> tiempo <strong>de</strong>l rotor. Una linea <strong>de</strong> trabajo interesantesería la <strong>de</strong> reformular el controlador Lyapunov-Integral y el estimador <strong>de</strong> flujo<strong>de</strong> rotor, <strong>de</strong> modo que se use la constante <strong>de</strong> tiempo <strong>de</strong>l rotor en lugar <strong>de</strong> su resistencia,obteniéndose por tanto un mejor comportamiento <strong>de</strong>l sistema cuando se somete avariaciones importantes en el flujo <strong>de</strong>l rotor.2 Del inglés Direct Torque <strong>Control</strong>
142 Conclusiones, aportaciones y sugerenciasOtra linea <strong>de</strong> trabajo diferente pero interesante para simplificar el software <strong>de</strong> controlsería, dado que las FPGA presentes actualmente en el mercado tienen una gran capacidad;implantar <strong>de</strong>ntro <strong>de</strong> la FPGA no sólo los temporizadores que permiten conmutar losinterruptores <strong>de</strong>l inversor en un instante preciso, sino también la circuitería encargada<strong>de</strong> calcular estos tiempos a partir <strong>de</strong> las componentes d y q <strong>de</strong>l vector <strong>de</strong> tensión que se<strong>de</strong>sea generar, en línea con el trabajo presentado en (Tzou y Hsu, 1997). Asimismo sepodría integrar en esta FPGA un circuito capaz <strong>de</strong> calcular la velocidad <strong>de</strong> la máquina apartir <strong>de</strong> los pulsos <strong>de</strong>l enco<strong>de</strong>r, en lugar <strong>de</strong> limitarse a contar dichos pulsos y <strong>de</strong>tectar elsentido <strong>de</strong> giro, tal como se ha hecho en esta tesis.Por último, sería interesante, siguiendo la línea <strong>de</strong> trabajo propuesta en (Muñoz Fríaset al., 1997), especificar todo el controlador o parte <strong>de</strong> él en un lenguaje <strong>de</strong> <strong>de</strong>scripción<strong>de</strong> hardware, como por ejemplo VHDL, e implantarlo en una FPGA <strong>de</strong> gran capacidad.En (Muñoz Frías et al., 1997) se abordó la especificación en VHDL <strong>de</strong> un algoritmo<strong>de</strong> estimación <strong>de</strong> la velocidad <strong>de</strong>l rotor basado en medidas <strong>de</strong> tensión y corriente conresultados esperanzadores.
K c ¡¡¢Apéndice AMo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong>inducción.En este apéndice se presentan los distintos mo<strong>de</strong>los <strong>de</strong> la máquina <strong>de</strong> inducción usadosen este trabajo. En primer lugar se presenta un mo<strong>de</strong>lo en variables <strong>de</strong> estado, usadopara el diseño <strong>de</strong> los controladores y <strong>de</strong> los estimadores. En segundo lugar se presenta unmo<strong>de</strong>lo basado en vectores espaciales que ha sido usado en el estimador <strong>de</strong> resistencia<strong>de</strong> rotor. En ambos mo<strong>de</strong>los se usa la transformación presentada en la sección A.1 paraconvertir las magnitu<strong>de</strong>s trifásicas <strong>de</strong> la máquina a un sistema <strong>de</strong> referencia que gira auna velocidad angular arbitraria. De esta forma se eliminan los términos <strong>de</strong>pendientes<strong>de</strong> la posición relativa entre el estator y el rotor presentes en el mo<strong>de</strong>lo original (Krause,1986).A.1.Transformación <strong>de</strong> ParkUn cambio <strong>de</strong> variables que transforma las magnitu<strong>de</strong>s trifásicas <strong>de</strong> la máquina a unsistema <strong>de</strong> referencia que gira con una velocidad ω C arbitraria se pue<strong>de</strong> expresar como:f c 0dq ¡ K c f rst(A.1)en don<strong>de</strong>:f0dq c f0 c fd c f c (A.2)q¡ ¡f rst ¡ f r f s f t¡ (A.3)k 1 k 1 k 12π4πk 2 cosθ k 2 cos¨θ¡ 2 cos¨θ¡¡ k 2 sinθ ¡ k 2 sin¨θ¡2π3©£¥¤¦ (A.4)θ ¡0tω c ¡ ζ¢ dζ ¢ θ¡ 0¢ (A.5)k 3© ¡ k 2 sin¨θ¡4π3©3©siendo ζ una variable <strong>de</strong> integración. El vector f pue<strong>de</strong> representar una tensión, unacorriente o un flujo <strong>de</strong> la máquina. Las constantes k 1 y k 2 se pue<strong>de</strong>n elegir según distintoscriterios <strong>de</strong> invarianza entre las magnitu<strong>de</strong>s originales (rst) y las nuevas (0dq) en régimen
144 Mo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong> inducción.Rω CθdqTSFigura A.1: Transformación <strong>de</strong> Parksenoidal equilibrado (Zamora Macho, 1997). En este trabajo se han elegido los valores<strong>de</strong> k 1 y k 2 para mantener la potencia <strong>de</strong>l motor invariante entre ambos sistemas:k 1 ¡k 2 ¡132¢3(A.6)(A.7)Por último conviene <strong>de</strong>stacar que se ha usado el superíndice c para indicar que las magnitu<strong>de</strong>stransformadas están referidas a un sistema que gira con velocidad ω C .Aunque la transformación presentada no es más que un cambio <strong>de</strong> variables y nonecesita ninguna connotación física, es conveniente interpretar la transformación comorelaciones trigonométricas entre variables según se muestra en la figura A.1. En dichafigura se pue<strong>de</strong> consi<strong>de</strong>rar que las magnitu<strong>de</strong>s fd c y f q c están alineadas a lo largo <strong>de</strong> losdos ejes ortogonales d y q, los cuales giran a una velocidad ω C . De la misma manera lasmagnitu<strong>de</strong>s f r f s y f t se pue<strong>de</strong>n consi<strong>de</strong>rar alineadas con tres ejes r, s y t, los cuales están<strong>de</strong>sfasados entre sí un ángulo 2π£ <strong>de</strong> 3. Si se proyectan las tres magnitu<strong>de</strong>s f r , f s y f t a lolargo <strong>de</strong>l eje d se obtiene la componente en eje d ( fd c ) <strong>de</strong> dichas magnitu<strong>de</strong>s, tal como sepue<strong>de</strong> <strong>de</strong>ducir <strong>de</strong> las ecuaciones <strong>de</strong> la transformación (A.1 – A.5). De la misma manera,la componente fq c será la proyección <strong>de</strong> las tres magnitu<strong>de</strong>s f r, f s y f t a lo largo <strong>de</strong>l eje q.Conviene <strong>de</strong>stacar que la componente 0 no está asociada con el sistema <strong>de</strong> referencia d-qmostrado en la figura A.1, sino que es una relación aritmética entre las variables r, s y t,in<strong>de</strong>pendiente <strong>de</strong>l ángulo θ.A.2.Mo<strong>de</strong>lo en variables <strong>de</strong> estadoEn este trabajo se han elegido como variables <strong>de</strong> estado las corrientes <strong>de</strong> estator,los flujos <strong>de</strong> rotor y la velocidad <strong>de</strong> giro <strong>de</strong> la máquina. 1 Para simplificar la ecuacióndiferencial resultante se aplica la transformación <strong>de</strong> Park <strong>de</strong>scrita en la sección A.1 alas corrientes y a los flujos <strong>de</strong> rotor, resultando un mo<strong>de</strong>lo en ejes d-q. Según se elija1 Expresada en radianes eléctricos
¡¡¡¢£¥¤¤¡¡¡¢¤¡¡¡¢£¥¤¤¤¡¡¡¢£¥¤¤¦¤¡¡¡¢£¥¤¤¦¤£¥¤¤¦¤¡¡¡¢¢¡¡¡¢£¥¤¤¦¤¢¡¡¡¢£¥¤¤¦¤£¥¤¤¦¤A.2 Mo<strong>de</strong>lo en variables <strong>de</strong> estado 145la velocidad <strong>de</strong> giro <strong>de</strong> los ejes ω c se obtendrán distintos mo<strong>de</strong>los, según se muestra acontinuación.A.2.1.Mo<strong>de</strong>lo en ejes genéricosSi los ejes d-q a los que se refieren las magnitu<strong>de</strong>s <strong>de</strong> la máquina giran con unavelocidad ω C , el mo<strong>de</strong>lo <strong>de</strong> la máquina pue<strong>de</strong> expresarse como (García Cerrada, 1991):A¤ ¡¥¢x¤ ¡£¢B¤ ¡£¢ddti c Sdi c Sqψ c Rdψ c Rq¦¡dω Rdt¡PA ω C B Cω RC¡¡ ¡ C¡ ¢D 0 E ω ω R0 D ω ω R E¡ ω C A ¡ Cω R B2J ¡ m e¡ m l ¢i c Sdi c Sqψ c Rdψ c RqF 00 F0 00 0u¦u c Sdu c (A.8)¡£¢ ¤Sq§En don<strong>de</strong>:σ¡ ¡¡L SBMσL S L RD¡ ¡R S R R ¡ 1¡ σ¢AL R σC ¡E ¡ ¡R RL RF ¡m e ¡ G¡ ψ s Rd is Sq¡ ψ s Rq is Sd¢ G ¡MR RσL S L 2 RMR RL R1σL SPM2L R(A.9)Siendo R S la resistencia <strong>de</strong> estator, R R la resistencia <strong>de</strong> rotor, L S la inductancia <strong>de</strong> estator,L R la inductancia <strong>de</strong> rotor, M la inductancia mutua rotor-estator y σ el factor <strong>de</strong>.dispersión, que es igual a 1¡M2L S L R¢A.2.2.Mo<strong>de</strong>lo en ejes <strong>de</strong> estator.Si se hace que la velocidad <strong>de</strong> giro <strong>de</strong> los ejes d-q sea ω C ¡ 0, <strong>de</strong> forma que el sistema<strong>de</strong> referencia dq permanece fijo, el mo<strong>de</strong>lo <strong>de</strong>l motor resultante se pue<strong>de</strong> expresar como:A¤ ¡£¢x¤ ¡£¢B¤ ¡£¢ddti s Sdi s Sqψ s Rdψ s Rq¦¡dω Rdt¡¡A 0 B Cω R0 A Cω R B¡ D 0 E ω R0 D ω R EP2J ¡ m e¡ m l ¢m e ¡ G¡ ψ s Rd is Sq¡ ψ s Rq is Sd¢i s Sdi s Sqψ s Rdψ s RqF 00 F0 00 0u¦u s Sdu s (A.10)¡¥¢ ¤Sq§(A.11)(A.12)en don<strong>de</strong> el superíndice s <strong>de</strong> las variables <strong>de</strong> estado y <strong>de</strong> la entrada indica que estánreferidas a unos ejes fijos al estator.
¡¢¡¢¢¢¢¦¡¢¦¢¡¢¦146 Mo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong> inducción.A.2.3.Mo<strong>de</strong>lo en ejes <strong>de</strong> flujo <strong>de</strong> rotorEn el mo<strong>de</strong>lo anterior las variables <strong>de</strong> estado son magnitu<strong>de</strong>s alternas en régimenpermanente. Si se hace que los ejes d-q giren a una velocidad ω S igual a la <strong>de</strong>l flujo<strong>de</strong> rotor, haciendo que el eje d sea en todo momento colineal con el vector <strong>de</strong> flujo, seobtiene el mo<strong>de</strong>lo <strong>de</strong>l motor en coor<strong>de</strong>nadas <strong>de</strong> flujo <strong>de</strong> rotor. La principal ventaja <strong>de</strong> estemo<strong>de</strong>lo consiste en que en este sistema <strong>de</strong> referencia las variables <strong>de</strong> estado son continuasen régimen permanente.Debido a que el eje d está permanentemente orientado según ψ R , la componente q <strong>de</strong>lflujo <strong>de</strong> rotor y su <strong>de</strong>rivada serán constantes e iguales a cero:ψ r Rq ¡ 0yddt ψr Rq ¡ 0Con lo que el mo<strong>de</strong>lo <strong>de</strong>l motor <strong>de</strong> inducción en ejes <strong>de</strong> flujo <strong>de</strong> rotor se reduce a:(A.13)A¤ ¡¥¢x¤ ¡¥¢B¤ ¡¥¢ddti r Sdi r Sqψ r Rd£¥¤¦ ¡A ω S B¡ ¡ ω S A Cω RD 0 E£¥¤i r Sdi r Sqψ r Rd£¥¤F 00 F0 0£¥¤u¦u r Sdu r (A.14)¡£¢ ¤Sq§ψ r Rq ¡ 0d ω Rdt¡P2J ¡ m e¡ m l ¢m e ¡ Gψ r Rd ir Sq(A.15)(A.16)en don<strong>de</strong> ω S es la velocidad <strong>de</strong> giro <strong>de</strong> los ejes, que se pue<strong>de</strong> <strong>de</strong>ducir <strong>de</strong> la última fila <strong>de</strong>(A.8) y (A.13):ω S ¡ ω R¢Di r Sqψ r Rd(A.17)A.3.Mo<strong>de</strong>lo basado en vectores espacialesEn este mo<strong>de</strong>lo las magnitu<strong>de</strong>s trifásicas <strong>de</strong> la máquina se representan mediantenúmeros complejos, con lo que se obtiene una expresión mucho más compacta <strong>de</strong> lasecuaciones (Leonhard, 1985). Sin embargo esta representación es equivalente a la transformación<strong>de</strong> Park presentada en la sección A.1. Se pue<strong>de</strong> <strong>de</strong>mostrar que si se eligenlos ejes real e imaginario coinci<strong>de</strong>ntes con los ejes d-q <strong>de</strong> la transformación <strong>de</strong> Park, secumple:u c S ¡ u c Sdı c S ¡ i c Sdψ c S ¡ ψ c Sdju c Sqji c Sqjψ c Sq(A.18)(A.19)(A.20)A.3.1.Mo<strong>de</strong>lo en ejes genéricosLas ecuaciones eléctricas <strong>de</strong> la máquina cuando se emplea una transformación usandoun sistema <strong>de</strong> referencia que gira con una velocidad ω c se reducen a (Zamora Macho,1997):
¢¢A.3 Mo<strong>de</strong>lo basado en vectores espaciales 147Ecuación <strong>de</strong>l estator:Ecuación <strong>de</strong>l rotor:u c S ¡ R S ı c S0 ¡ R R ı c Rd ¢dt ψc ¢Rd ¢dt ψc ¢Sjω C ψ c Sj ¡ ω C¡ ω R ¢ ψ c R(A.21)(A.22)Ecuación <strong>de</strong>l flujo <strong>de</strong> estator:ψ c S ¡ L S ı c SMı c R(A.23)Ecuación <strong>de</strong>l flujo <strong>de</strong> rotor:ψ c R ¡ Mı c SL R ı c R(A.24)A.3.2.Mo<strong>de</strong>lo usado para la estimación <strong>de</strong> la resistencia <strong>de</strong> rotorPara la estimación <strong>de</strong> R R se emplea un mo<strong>de</strong>lo expresado en un sistema <strong>de</strong> referenciafijo al estator (ω C ¡ 0). A<strong>de</strong>más, dado que las únicas magnitu<strong>de</strong>s que pue<strong>de</strong>n medirseson las corrientes y tensiones <strong>de</strong> estator, es necesario hallar un mo<strong>de</strong>lo en el que sólointervengan dichas magnitu<strong>de</strong>s.Si se sustituye en (A.22) la corriente <strong>de</strong> rotor obtenida a partir <strong>de</strong> (A.24) y se multiplicala ecuación resultante por M£ L R , se obtiene:M d RL R dt ψs ¢ RRL RMψ s ¡ 1¡ σ¢¢R L S ı s Mjω ¡ R ψ s RL R L RS¡(A.25)Como se pue<strong>de</strong> apreciar, esta ecuación <strong>de</strong>pen<strong>de</strong> aún <strong>de</strong> ψ s R . Para encontrar una expresión<strong>de</strong>l vector espacial <strong>de</strong>l flujo <strong>de</strong> rotor en función <strong>de</strong> los vectores espaciales <strong>de</strong> tensión ycorriente <strong>de</strong> estator, a partir <strong>de</strong> (A.23) y (A.24) se obtiene:ψ s S σL ¡ S ıss ¢ Mψ s RL R(A.26)Sustituyendo la <strong>de</strong>rivada <strong>de</strong> ψ s S, obtenida a partir <strong>de</strong> la ecuación anterior, en (A.21),teniendo en cuenta que ω C 0, resulta: ¡ddt ψs ¡L RRMuc R S¡ S ı c σL S¡dSdt ı sutilizando (A.27), la ecuación (A.25) se pue<strong>de</strong> expresar como:S¡don<strong>de</strong>:v 1 ¡v 2 ¡(A.27)v 1¡ jω R v 1 dt ¡ ¡ R R1L Rv 2 dt¡ (A.28)M dL RMψ s RL Rdt ψs ¡ R u s R S¡ S ı s S¡dσL Sdt ı Ss¡ 1¡ σ¢¢L S ıS s u s S¡ R ¡ S ı s S¡dL Sdt ı Ss(A.29)(A.30)Estas tres últimas ecuaciones forman el mo<strong>de</strong>lo que será usado para estimar el valor <strong>de</strong>la resistencia <strong>de</strong> rotor.
148 Mo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong> inducción.i r SdR Si r OdEje du r Sdu r Od 3 0L mi r SqR Si r OqωL d i r Sdω s L d i r Sdi REje qu r Sq+ +R u r C OqL q u r Rq 0 R 3 RFigura A.2: Circuito equivalente en régimen permanente <strong>de</strong>l motor <strong>de</strong> inducciónA.4.Mo<strong>de</strong>lo basado en circuito equivalentePara aplicar una estrategia <strong>de</strong> minimización <strong>de</strong> pérdidas es mas ventajoso el uso <strong>de</strong>un mo<strong>de</strong>lo basado en un circuito equivalente <strong>de</strong> régimen permanente. El mo<strong>de</strong>lo másampliamente utilizado en la literatura sobre minimización <strong>de</strong> pérdidas se muestra en lafigura A.2 (García et al., 1994), en don<strong>de</strong> R C es una resistencia que mo<strong>de</strong>la las pérdidas enel hierro <strong>de</strong>bidas al armónico fundamental, iOd r e ir Oq son las componentes <strong>de</strong> la corrienteequivalente <strong>de</strong> entrehierro, u r Od y ur Oqson las componentes <strong>de</strong> la tensión equivalente <strong>de</strong>entrehierro y u r Rq e i R son la tensión y corriente <strong>de</strong> rotor.Si se supone que (Fernán<strong>de</strong>z Bernal, 2000):i r Oq ¡ i r Sq¡ i r Cq i r Sq (A.31)y que ω£ ω S , el esquema equivalente <strong>de</strong> la figura A.2 se pue<strong>de</strong> simplificar, resultandoel esquema mostrado en la figura A.3, que será el utilizado en este trabajo para <strong>de</strong>ducirlas estrategias <strong>de</strong> minimización <strong>de</strong> pérdidas. Nótese que en el circuito equivalente simplificadolas pérdidas óhmicas en eje d y en eje q son distintas, por lo que las pérdidasóhmicas no son mínimas cuando la corriente <strong>de</strong> entrada es mínima, sino que es necesarioque la corriente en eje d sea mayor que la <strong>de</strong> eje q para compensar la mayor resistenciapresente en el circuito equivalente <strong>de</strong>l eje q (Fernán<strong>de</strong>z Bernal, 2000).
A.4 Mo<strong>de</strong>lo basado en circuito equivalente 149i r SdR Si r OdEje du r Sdu r Od 3 0L mi r SqR SR R+i r OqωL d i r SdEje qu r SqR Cu r OqFigura A.3: Circuito equivalente en régimen permanente simplificado <strong>de</strong>l motor <strong>de</strong> inducción
150 Mo<strong>de</strong>lado <strong>de</strong> la máquina <strong>de</strong> inducción.
Apéndice BParámetros <strong>de</strong>l motorB.1.Motor Indar <strong>de</strong> 15 kWR R 0¢ 17750Ω ¡L R 0¢ 041563H ¡¡ 0¢ M 040030H¡ 5kgr£ J m 2V nom 380V ¡R S 0¢ 22428Ω ¡L S 0¢ 041327H ¡¡ P 4PolosPotencia = 15 kWI nom 33¢ 5A ¡B.2.Motor AEG <strong>de</strong> 250 WR R ¡ 25ΩL R 1¢ 3725H ¡¡ 1¢ M 2648H¡ 0¢ 01kgr£ J m 2V nom ¡ 380VR S ¡ 50¢ 1915ΩL S ¡ 1¢ 3725H¡ P 4PolosPotencia = 0,250 kWI nom ¡ 0¢ 86A
152 Parámetros <strong>de</strong>l motor
∇h ¡L f h¡ x¢ ¡Apéndice CHerramientas matemáticasEn esta sección se presentan algunas <strong>de</strong>finiciones <strong>de</strong> geometría diferencial que se hanusado a lo largo <strong>de</strong>l documento. Para una presentación más exhaustiva pue<strong>de</strong> consultarse(Khalil, 1996), (Slotine y Li, 1991) o (Isidori, 1995).C.1.Herramientas <strong>de</strong> geometría diferencialTodas las funciones presentes en las siguientes <strong>de</strong>finiciones se suponen “suaves” entodos sus argumentos, es <strong>de</strong>cir, las funciones y sus <strong>de</strong>rivadas parciales hasta un or<strong>de</strong>nsuficientemente elevado son continuas.Definición C.1 Un campo vectorial es una función f : Dx <strong>de</strong> su dominio Ddimensión nR n , que asigna a cada puntoR n un vector f¡ x¢ . Un campo vectorial es un vector columna <strong>de</strong>Definición C.2 Un campo covectorial es la transpuesta <strong>de</strong> un campo vectorial. Un campocovectorial es un vector fila <strong>de</strong> dimensión nDefinición C.3 Sea una función escalar <strong>de</strong> variable vectorial h : Ddomino DR n . El gradiente <strong>de</strong> h¡ x¢ es un campo covectorial <strong>de</strong>finido por:R <strong>de</strong>finida en un∂h∂x ¡∂h∂x 1∂h∂x 2§¨§©§∂h∂x n¡(C.1)Definición C.4 Sea la función escalar <strong>de</strong> variable vectorial h : D R y el campo vectorialf : D R n <strong>de</strong>finidos en el domino D R n . La <strong>de</strong>rivada <strong>de</strong> Lie <strong>de</strong> h con respecto a f(o a lo largo <strong>de</strong> f) es la función escalar <strong>de</strong>finida por:∂hf¡ x¢∂x (C.2)Como se pue<strong>de</strong> apreciar la <strong>de</strong>rivada <strong>de</strong> Lie no es más que la <strong>de</strong>rivada <strong>de</strong> una función h¡ x¢a lo largo <strong>de</strong> las trayectorias <strong>de</strong>l sistema d dt x ¡ f¡ x¢ . La ventaja <strong>de</strong> esta nueva notación sehace patente cuando es necesario repetir el cálculo <strong>de</strong> la <strong>de</strong>rivada con respecto al mismocampo vectorial o con respecto a otro distinto. La <strong>de</strong>finición recursiva <strong>de</strong> las <strong>de</strong>rivadas <strong>de</strong>
154 Herramientas matemáticasLie es:L 0 f ¡ h¡ x¢L 1 f h¡ x¢ ¡∂h(C.4)f¡ x¢ x¢ h¡L 2 f h¡ x¢ ¡..∂x∂L 1 f∂xh¡ x¢(C.3)f¡ x¢ (C.5)L i 1¡∂Lf i¡ h¡ x¢f f¡ x¢ (C.6)∂xDe la misma manera h¡ x¢ si es otro campo vectorial, la función escalar g¡ x¢ L g L f es: x¢ h¡L g L f h¡ x¢ ¡∂L f x¢ h¡∂xg¡ x¢ (C.7)
Apéndice DCálculo <strong>de</strong> los tiempos <strong>de</strong>conmutación <strong>de</strong> las ramas <strong>de</strong>linversorEn la Sección 7.3.2 se ha mostrado un método para conmutar las ramas <strong>de</strong>l inversor<strong>de</strong> forma que se obtenga en la carga el vector <strong>de</strong> tensión u S <strong>de</strong>seado. En primer lugares necesario averiguar en cual <strong>de</strong> las seis regiones <strong>de</strong>l inversor se encuentra el vector u S(Rab) y en segundo lugar es necesario calcular los tiempos t a y t b durante los que tieneque estar en inversor en cada uno <strong>de</strong> los modos activos a y b <strong>de</strong> la región Rab.d1d2 1267uS35q67uS3q48458(a) Estrella.(b) Triángulo.Figura D.1: Tensiones generadas en ejes d-q.
No uSd¡No uSd¡u Sd ¢No uSq¡No uSq¡¤ u Sd ¢No uSd¡No uSd¡No uSd ¢156 Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutación <strong>de</strong> las ramas <strong>de</strong>l inversorD.1.Localización <strong>de</strong>l vector u S en una <strong>de</strong> las seis regiones<strong>de</strong>l inversorEn la figura D.1 se muestran las tensiones en ejes d-q generadas por el inversor en cadauno <strong>de</strong> los modos para una carga conectada en estrella (D.1(a)) o en triángulo (D.1(b)).Como se pue<strong>de</strong> observar el plano d-q se divi<strong>de</strong> en seis regiones <strong>de</strong>limitadas por los modosactivos. Antes <strong>de</strong> calcular el tiempo que ha <strong>de</strong> estar el inversor en cada uno <strong>de</strong> losmodos adyacentes <strong>de</strong> la región en la que se encuentra el vector a generar u S , es necesarioaveriguar precisamente cual es esta región. En el diagrama <strong>de</strong> flujo mostrado en laFigura D.2 se muestra un algoritmo propuesto en (García Cerrada, 1991) para calcular encual <strong>de</strong> las seis regiones posibles se encuentra el vector u S cuando la carga está conectadaen estrella. Para una carga conectada en triángulo el algoritmo es similar, mostrándosesu diagrama <strong>de</strong> flujo en la figura D.3. En ambos casos en los dos primeros niveles <strong>de</strong><strong>de</strong>cisión se averigua en que cuadrante está el vector u S y en el tercer nivel se averigua encual <strong>de</strong> las dos regiones <strong>de</strong>l inversor que se encuentran en el cuadrante está situado u S .0Si0Si0SiNo uSd¡ u Sq3SiNou £ Sq3SiNou Sq3Siu Sq3SiR46R26R12 R26 R45 R35 R13 R35Figura D.2: Selección <strong>de</strong> la región <strong>de</strong> u S . Conexión en estrella0Si0Si0SiSiNoSiNoSiNo uSd¡3u SqSiR45R46No uSd¡3u Sq u Sd ¢ ¤ 3u Sq¤ u Sd ¢ 3u SqR13R12 R26 R45 R35R12Figura D.3: Selección <strong>de</strong> la región <strong>de</strong> u S . Conexión en triángulo
t s ¤D.2 Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutación 157D.2.Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutaciónPara calcular el tiempo que ha <strong>de</strong> estar el inversor en cada uno <strong>de</strong> los modos a y bentre los que se encuentra el vector u S que se <strong>de</strong>sea generar, se parte <strong>de</strong> la ecuación (7.2),que se pue<strong>de</strong> escribir en forma matricial como:u S ¡¦u Sadu Saqu Sbda¤¦tu Sbq§ t b§aU¤¦t¡t b§(D.1)En don<strong>de</strong> ¡ u Sad ¢ u Saq ¢ y ¡ u Sbd ¢ u Sbq ¢ son las componentes en ejes d-q <strong>de</strong> la tensiones generadasen los modos a y b, que vienen dadas en la tabla 7.2 para una carga conectada enestrella o en la tabla 7.3 para una carga conectada en triángulo. Esta ecuación se pue<strong>de</strong>transformar, multiplicando ambos miembros <strong>de</strong> la ecuación por U 1 en:¡¦t au S(D.2)t b§Aplicando la ecuación (D.2) en cada una <strong>de</strong> las regiones <strong>de</strong>l inversor se obtienen lostiempos <strong>de</strong> cada modo en función <strong>de</strong> la tensión u S que se <strong>de</strong>sea generar, la tensión <strong>de</strong>lcircuito <strong>de</strong> continua V C y <strong>de</strong>l periodo <strong>de</strong> muestreo t s . Para una carga conectada en estrellalos resultados son:1Región 1:¦t¡t 3§Región 2:¦t 3t 5§t s3V C 2¦ ¤t s3V C 2¦ ¤10¡¤¦u2§¡13 1§Sdu Sq§Sdu Sq§¡ t s ¤ U ¡ 1¤Región 3:¦t 5t 4§t s0V C 2¦ ¤¤¦u2Sdu Sq§Región 4:¦t 4t 6§Región 5:¦t 6t 2§Región 6:¦t 2t 1§¡¡t sV C 2¦¡ 3 1¤3¤¦u1§ ¡ ¡¤¦u0 ¡ 2§t sV C 2¦¡ 3 ¡ 1¤3 ¡ 1§¤¦ut s¤¦0V¡ 2C 2 3 1§Sdu Sq§Sdu Sq§Sdu Sq§¡¡Y para una carga conectada en triángulo se obtiene:¡Región 1:¦t 1t 3§Región 2:¦t 3t 5§¡¤¦ut s¦2 0¤¦uV C 6 1 ¡ 3§ ¤t s3¤¦1V C 6 2 ¡ 0§Sdu Sq§Sdu Sq§Región 3:¦t 5t 4§Región 4:¦t 4t 6§Región 5:¦t 6t 2§¡¡t sV C 6¤¦¡t sV C 6¤¦¡1¤¦u3§ ¡ ¡¤¦u1 ¡ 3§¤¦u1 32 0t s¦¡ 1 ¡ 3¤¦uV C 6 2 0 § ¤Sdu Sq§Sdu Sq§Sdu Sq§¡¡
158 Cálculo <strong>de</strong> los tiempos <strong>de</strong> conmutación <strong>de</strong> las ramas <strong>de</strong>l inversor2Región 6:¦t¡t 1§t s¦1 3V¡C 6 1 3§ ¤¤¦uSdu Sq§
Apéndice EImplantación <strong>de</strong>l controladorcuando existe un retardo en laaplicación <strong>de</strong> la tensiónEn las simulaciones realizadas a lo largo <strong>de</strong> esta tesis se ha supuesto que el procesoque es necesario realizar para calcular las salidas <strong>de</strong>l controlador se pue<strong>de</strong> hacer instantáneamente.Sin embargo, en la aplicación práctica es necesario tener en cuenta que lafrecuencia <strong>de</strong> muestreo necesaria para implantar el controlador en tiempo discreto es relativamentealta, <strong>de</strong>l or<strong>de</strong>n <strong>de</strong> unos kilohercios, que los cálculos a realizar son relativamentecomplejos y que en el esquema <strong>de</strong> modulación empleado es necesario conocer el valor<strong>de</strong> la tensión a generar al principio <strong>de</strong>l periodo <strong>de</strong> muestreo. Todo ello hace necesario enla aplicación práctica emplear gran parte <strong>de</strong>l periodo <strong>de</strong> muestreo en realizar estos cálculos,aplicando la tensión resultante en el siguiente periodo <strong>de</strong> muestreo. De hecho, enla sección 7.4.1 se ha mostrado que la FPGA encargada <strong>de</strong> disparar las ramas <strong>de</strong>l inversorse ha diseñado teniendo esto en cuenta, <strong>de</strong> forma que se dispone <strong>de</strong> todo un periodo<strong>de</strong> muestreo para escribir los tiempos <strong>de</strong> conmutación que se aplicarán en el siguienteperiodo.Si no se <strong>de</strong>sea que se produzca una <strong>de</strong>gradación <strong>de</strong> las prestaciones <strong>de</strong> los controladores,es necesario tener en cuenta el retraso producido por los cálculos en el diseño<strong>de</strong> éstos. El esquema seguido en esta tesis ha consistido en realizar un controlador <strong>de</strong>dos niveles, es <strong>de</strong>cir, se ha diseñado un controlador no lineal que genera las referencias<strong>de</strong> corriente y éstas se introducen en unos reguladores <strong>de</strong> corriente que calculan la tensiónque es necesario aplicar al motor. Si las constantes <strong>de</strong> tiempo <strong>de</strong> los reguladores nolineales se diseñan <strong>de</strong> forma que sean mucho más gran<strong>de</strong>s que las <strong>de</strong> los reguladores <strong>de</strong>corriente, lo cual ha sido el proceso seguido en esta tesis, pue<strong>de</strong> <strong>de</strong>spreciarse el efecto<strong>de</strong>l retardo <strong>de</strong> los cálculos en dichos reguladores no lineales. Por lo tanto, en este trabajose tendrá en cuenta el retardo producido en la aplicación <strong>de</strong> la tensión solamente en losreguladores <strong>de</strong> corriente.
¦¨ı y Sx¤¡£¢¡¢¦ı y Sx¤¡£¢¨¢160 Implantación <strong>de</strong>l controlador cuando existe un retardo en la aplicación. . .E.1.Diseño <strong>de</strong>l controlador <strong>de</strong> corriente con retardo enla aplicación <strong>de</strong> la salidaEn las secciones 3.3.1 y 3.4.1 se han diseñado sendos controladores <strong>de</strong> corriente,implantados en ejes <strong>de</strong> estator y en ejes <strong>de</strong> rotor respectivamente. En ambos casos laecuación <strong>de</strong>l sistema lineal a controlar es la misma:ddt¦i y Sxi¦A 0¡¥¢ ¤y ¡1 0§Sx§¦i y Sxi y Sx§¢¡¥¢¤¦F0§v y Sx(E.1)sin más que sustituir el superíndice y por s en el controlador en ejes <strong>de</strong> estator o por ren el controlador en ejes <strong>de</strong> flujo <strong>de</strong> rotor. De la misma manera conviene recordar que elsubíndice x ha <strong>de</strong> sustituirse por d para el controlador <strong>de</strong> corriente <strong>de</strong> eje d o por q parael controlador <strong>de</strong> corriente en eje q.Los controladores <strong>de</strong> corriente han <strong>de</strong> implantarse en tiempo discreto, por lo quees necesario obtener un sistema equivalente en tiempo discreto, que vendrá dado por laecuación:(E.2)ı y Sx©k 1 ¡ F¨ ıy Sx©kG¨v y Sx©kEn don<strong>de</strong> si la tensión se aplica con un retenedor <strong>de</strong> or<strong>de</strong>n cero, F y G vienen dadas porla expresión (Åström y Wittenmark, 1984):F ¡ e T s(E.3)¡ G e s G(E.4)ds¤0Como se pue<strong>de</strong> apreciar en la ecuación E.2 se ha supuesto que la salida <strong>de</strong>l controlador,v y Sx, se pue<strong>de</strong> aplicar en el instante <strong>de</strong> muestreo k. Sin embargo, según se hadiscutido anteriormente, esto no es posible, sino que en el instante k se aplicará la salidacalculada k¡ en el instante 1. Si se aumenta el sistema con una nueva variable <strong>de</strong> estado,¨v y , se obtiene (Franklin et al., 1990):Sx©k 1 ¡¡ z¢ k ¡T sı y Sxz§¢¡ k 1¦F G0¡ 0§ı y Sxz§¢¡k¢¦01§¨v y (E.5)Sx©kEn (García Cerrada, 1991) se <strong>de</strong>muestra que este nuevo sistema es controlable ¡ si ¢ G¢ Ftambién lo es. Por tanto será posible diseñar un controlador mediante asignación <strong>de</strong> polospara este sistema. En este trabajo se ha usado para ello la función place <strong>de</strong> la toolbox<strong>de</strong> control <strong>de</strong> Octave. La ecuación <strong>de</strong> cada uno <strong>de</strong> los controladores <strong>de</strong> corriente será portanto:¡ v r Sx¢k ¡ K p K I K r¡¨i r i r £¥¤Sxr©k¨i r i r ¦ (E.6)Sxr©©kSx¡Sx¡¨v r Sx©k ¡ 1
i r ¡ Sdri r Sq r¡Apéndice F<strong>Control</strong> vectorial indirectoUn método <strong>de</strong> control <strong>de</strong> la máquina <strong>de</strong> inducción muy utilizado en la práctica <strong>de</strong>bidoa su facilidad <strong>de</strong> implantación es el control vectorial indirecto (Murphy y Turnbull,1988). En este controlador tanto el flujo <strong>de</strong> rotor como el par son controlados en bucleabierto, existiendo sólo un bucle <strong>de</strong> control en lazo cerrado para la velocidad <strong>de</strong> giro <strong>de</strong>la máquina.Al igual que el resto <strong>de</strong> los controladores, el controlador indirecto se ha implantadoen esta tesis utilizando un inversor fuente <strong>de</strong> tensión controlado por corriente. Por tantolas salidas <strong>de</strong>l controlador vectorial indirecto serán las referencias <strong>de</strong> las corrientes enejes d y q que es necesario aplicar a la máquina.F.1.Orientación al campoEn este controlador no es preciso estimar el vector <strong>de</strong> flujo <strong>de</strong> rotor. En su lugar seestima sólo la posición <strong>de</strong> dicho vector, lo cual se hace integrando su velocidad <strong>de</strong> giro.La velocidad <strong>de</strong> giro <strong>de</strong>l vector <strong>de</strong> flujo se calcula a partir <strong>de</strong> la velocidad <strong>de</strong>l rotor y <strong>de</strong>la referencia <strong>de</strong> la pulsación <strong>de</strong> <strong>de</strong>slizamiento según la ecuación:ω Sr ¡ ω R¢Di r Sq rψ r Rdr(F.1)F.2.Cálculo <strong>de</strong> las referencias <strong>de</strong> las corrientesAl ser un controlador en bucle abierto, las referencias <strong>de</strong> las corrientes se calculandirectamente a partir <strong>de</strong> las referencias <strong>de</strong>l flujo <strong>de</strong> rotor y <strong>de</strong>l par <strong>de</strong> carga. Así:ψ r RdrMm erGψ r Rdr(F.2)(F.3)Aunque este controlador es en bucle abierto, pue<strong>de</strong> <strong>de</strong>mostrarse (Robertson, 1999) quetanto el flujo como el par convergen asintóticamente a sus referencias. Esta convergencia,aunque a un valor distinto, se mantiene incluso cuando existen errores en la resistencia<strong>de</strong> rotor.
162 <strong>Control</strong> vectorial indirectoNótese que estas corrientes están referidas a unos ejes que giran solidarios al flujo <strong>de</strong>rotor. Por tanto será necesario calcular las corrientes en ejes <strong>de</strong> estator aplicando un giro<strong>de</strong> ejes con un ángulo igual a la integral <strong>de</strong> la velocidad ω Sr <strong>de</strong> la misma forma que se harealizado para el resto <strong>de</strong> los controladores implantados en esta tesis.F.3.<strong>Control</strong> <strong>de</strong> velocidadLa referencia <strong>de</strong>l par <strong>de</strong> carga se calcula mediante un regulador <strong>de</strong> velocidad en lazocerrado. En este trabajo se ha implantado un regulador PI que tiene por expresión:m er ¡ K I ¡ ω Rr¡ ω R ¢ dt ¢ K P ¡ ω Rr¡ ω R ¢ (F.4)
Apéndice G<strong>Control</strong> con minimización <strong>de</strong>pérdidasEn los capítulos 2, 3, 4 y 5 se ha visto que aunque la variable a controlar en el accionamientoha sido su velocidad, el motor <strong>de</strong> inducción mo<strong>de</strong>lado en ejes d-q es unsistema multivariable con dos entradas, que pue<strong>de</strong>n ser las tensiones o las corrientes <strong>de</strong>estator y dos salidas, que pue<strong>de</strong>n ser el flujo <strong>de</strong> rotor y la velocidad. Por tanto, aunquela variable que se <strong>de</strong>sea controlar es la velocidad, se dispone <strong>de</strong> un grado <strong>de</strong> libertadadicional que es el módulo <strong>de</strong>l flujo. En los experimentos llevados a cabo en los capítuloscitados anteriormente se ha mantenido el flujo a su valor nominal para conseguir lamejor respuesta dinámica posible <strong>de</strong>l accionamiento. Sin embargo, si no se requiere unaexcelente respuesta dinámica o si el accionamiento tiene restricciones energéticas importantes,1 es posible mejorar el rendimiento <strong>de</strong> la máquina variando el módulo <strong>de</strong>l flujo <strong>de</strong>rotor según una estrategia <strong>de</strong> mínimas pérdidas.En (Fernán<strong>de</strong>z Bernal, 2000) se han <strong>de</strong>sarrollado una serie <strong>de</strong> estrategias para minimizarlas pérdidas en la máquina <strong>de</strong> inducción. En (Catalán Morrós, 2000) se realiza unaprimera aplicación <strong>de</strong> estas técnicas a la máquina <strong>de</strong> inducción usando un controladorLyapunov-Integral. Basándose en estos <strong>de</strong>sarrollos, en la sección G.1 se expone una nuevaimplantación simplificada <strong>de</strong> un método para minimizar las pérdidas óhmicas <strong>de</strong> lamáquina <strong>de</strong> inducción, tanto en el estator como en el rotor.G.1.Minimización <strong>de</strong> pérdidas óhmicasLas pérdidas óhmicas en el rotor y el estator <strong>de</strong>l motor <strong>de</strong> inducción se pue<strong>de</strong>n calculara partir <strong>de</strong>l circuito equivalente <strong>de</strong> régimen permanente simplificado <strong>de</strong>sarrollado enla sección A.4 y mostrado en la figura A.3 (Fernán<strong>de</strong>z Bernal, 2000):P cu R S ¡ i r Sd¢2 ¢¡ R S¢R R ¢¨i r Sq©2(G.1)1 Un ejemplo <strong>de</strong> sistema con restricciones energéticas es un vehículo eléctrico, en el que es preciso maximizarla duración <strong>de</strong> las baterías.
¢164 <strong>Control</strong> con minimización <strong>de</strong> pérdidasω RrMin. PérdidasC. Lyap-Inti r Sd ri r Sq rInversor fuente <strong>de</strong> tensióncontrolado por corrientev r Sd u r SdPIv r Des.Sq u r SqPI Des.giroejes∆αdq/rstαi r Sdi r Sqdq/rsti Ri Sω Rˆψ r RdEst. ψ r RdαFigura G.1: Diagrama <strong>de</strong> bloques <strong>de</strong>l controlador con estrategia <strong>de</strong> minimización <strong>de</strong> pérdidasEsta ecuación <strong>de</strong> pérdidas será la ecuación a minimizar bajo la restricción <strong>de</strong> proporcionarel par motor requerido por el controlador <strong>de</strong> velocidad:Pm e2 L miSd r ir Sq ¡(G.2)Si se sustituye el valor <strong>de</strong> iSq r obtenido <strong>de</strong> (G.2) en (G.1) y se <strong>de</strong>riva2 esta última ecuacióncon respecto a iSd r y se iguala a cero se obtiene:i r Sd ¡4 R R¢R SR S2 2 m 2 eP 2 L 2 m(G.3)Para evitar la realización <strong>de</strong> la raíz cuarta se pue<strong>de</strong> sustituir (G.2) en (G.3), obteniéndose:iSd r R R1 i ¢ Sq r (G.4)¡R SConviene <strong>de</strong>stacar que con esta nueva expresión la raíz cuadrada sólo es necesario realizarlaen la puesta en marcha o cuando varía la resistencia <strong>de</strong> rotor, pero no en cadaperiodo <strong>de</strong> muestreo.G.2.Detalles <strong>de</strong> implementaciónEn la figura G.1 se muestra un diagrama <strong>de</strong> bloques <strong>de</strong>l accionamiento con la estrategia<strong>de</strong> minimización <strong>de</strong> pérdidas presentada en este apéndice. Como se pue<strong>de</strong> observarexiste un regulador Lyapunov-Integral que a partir <strong>de</strong> la referencia <strong>de</strong> velocidad y su medidacalcula la referencia <strong>de</strong> la corriente en eje q, i r Sq r, que ha <strong>de</strong> proporcionar la máquina.Una vez calculado el valor <strong>de</strong> i r , aplicando la ecuación G.4 se obtiene el valor <strong>de</strong> la referencia<strong>de</strong> la corriente en eje d, i r Sd rSqr, (bloque “Min. Pérdidas”). El resto <strong>de</strong>l controladores igual al controlador <strong>de</strong> Lyapunov mostrado en la sección 2.4.2.2 En (Fernán<strong>de</strong>z Bernal, 2000) se <strong>de</strong>muestra que la mejora en el rendimiento obtenida al tener en cuenta lasaturación <strong>de</strong>l hierro no es muy significativa, por lo que su efecto pue<strong>de</strong> <strong>de</strong>spreciarse en la aplicación práctica.Por tanto en este trabajo no se tendrá en cuenta este efecto y se consi<strong>de</strong>rará que los valores <strong>de</strong> las inductanciasson in<strong>de</strong>pendientes <strong>de</strong>l valor <strong>de</strong> las corrientes. En consecuencia para el cálculo <strong>de</strong> la <strong>de</strong>rivada <strong>de</strong> (G.1) seconsi<strong>de</strong>rará que L m es constante.
τ i ¡¢G.2 Detalles <strong>de</strong> implementación 165iSdr r R RR 3¡ 1¢SiSq r r£ £ ££ ££FiltroFigura G.2: Diagrama <strong>de</strong> bloques <strong>de</strong>l cálculo <strong>de</strong> i r Sdr .Conviene <strong>de</strong>stacar que en la aplicación experimental <strong>de</strong>l controlador con minimización<strong>de</strong> pérdidas ha sido necesario incluir un filtro en el cálculo <strong>de</strong> la referencia <strong>de</strong> la corrienteen eje d para hacer la dinámica <strong>de</strong>l flujo más lenta que la <strong>de</strong> la velocidad. Asimismo tambiénha sido necesario incluir una saturación en dicha referencia <strong>de</strong> corriente para evitarque cuando la máquina esté en vacío se solicite un flujo <strong>de</strong>masiado bajo que haga per<strong>de</strong>rla orientación al campo o que cuando el par sea elevado se solicite un flujo <strong>de</strong>masiadoalto y se produzca una saturación en el hierro. En la figura G.2 se muestra un diagrama<strong>de</strong> bloques <strong>de</strong> la implantación <strong>de</strong> la estrategia <strong>de</strong> minimización <strong>de</strong> pérdidas.Para filtrar el valor calculado <strong>de</strong> i r Sd rse ha utilizado una media móvil, la cual pue<strong>de</strong>ser calculada <strong>de</strong> forma recursiva en tiempo discreto según:¨i r λ Sdr©k ¡ i¨i r ¢Sdr©k¡ 1¡ λ1 i ¢¡1 ¢ R RR S¨i r Sq©k(G.5)Viniendo <strong>de</strong>finida la constante <strong>de</strong> tiempo τ i <strong>de</strong> la ventana exponencial aplicada a i r Sdr porel factor <strong>de</strong> olvido λ i según la expresión:T slnλ i(G.6)
166 Bibliografía
BibliografíaArrowsmith, D. K. y Place, C. M. (1982). Ordinary Differential Equations. Chapmanand Hall Mathematics Series. Chapman and Hall, London.Åström, K. J. y Hägglund, T. (1995). PID <strong>Control</strong>lers: Theory, Design and Tuning.Instrument Society of America, 2nd edition.Åström, K. J. y Wittenmark, B. (1984). Computer <strong>Control</strong>led Systems. Theory and Design.Prentice-Hall Information and System Science. Prentice/Hall International.Auslan<strong>de</strong>r, D. M., Ridgely, J. R., y Jones, J. C. (1996). Real-time software for implementationof feedback control. In The <strong>Control</strong> Handbook. CRC Press and IEEEPress.Barabanov, M. (1997). A linux-based real-time operating system. Master’s thesis, NewMexico Institute of Mining and Technology, Socorro, New Mexico.Barabanov, M. y Yodaiken, V. (1997). Introducing real-time linux. Linux Journal, (34).Bellini, A., Figalli, G., y Ulivi, G. (1983). A microcomputer based control system foran inverter supplying state feedback controlled induction motor. In IFAC <strong>Control</strong> inPower Electronics and Electrical Drives, pp 531–537, Laussanne.Blaschke, F. (1972). The principle of field orientation as applied to the new TRANSVEC-TOR closed loop control system for rotating field machines. Siemens Review, pp217.Bodson, M., Chiasson, J., y Novotnak, R. (1994). High-performance induction motorcontrol via input-output linearization. IEEE <strong>Control</strong> Systems, pp 25–33.Bottura, C. P., Silvino, J. L., y Resen<strong>de</strong>, P. (1993). A flux observer for induction machinesbased on a time-variant discrete mo<strong>de</strong>l. IEEE Transactions on Industry Applications,29(2):349–354.Briz <strong>de</strong>l Blanco, F. (1995). <strong>Control</strong> vectorial <strong>de</strong>l motor <strong>de</strong> inducción con i<strong>de</strong>ntificación yadaptación a los parámetros <strong>de</strong> la carga. PhD thesis, Universidad <strong>de</strong> Oviedo.Campo, P. J. y Morari, M. (1990). Robust control of processes subject to saturationnonlinearities. Comput. Chem. Engng., 14:343–358.Catalán Morrós, J. (2000). Implantación <strong>de</strong> un control <strong>de</strong> minimización <strong>de</strong> pérdidaseléctricas en motores asíncronos con control vectorial. Master’s thesis, UniversidadPontificia Comillas. ETSI ICAI.
168 BibliografíaCerruto, E., Consoli, A., Raciti, A., y Testa, A. (1997). Fuzzy adaptive vector control ofinduction motor drives. IEEE Transactions on Power Electronics, 12(6):1028–1040.Dawson, D. M., Hu, J., y Burg, T. C. (1998). Nonlinear <strong>Control</strong> of Electric Machinery.Marcel Dekker.Fernán<strong>de</strong>z Bernal, F. (2000). Optimización <strong>de</strong> pérdidas en motores eléctricos mediantecontrol vectorial. PhD thesis, Universidad Pontificia Comillas.Franklin, J., Powell, J., y Workman, M. (1990). Digital <strong>Control</strong> of Dynamic Systems.Addison-Wesley, 2 edition.García, G. O., Men<strong>de</strong>s Luís, J. C., Stephan, R. M., y Watanabe, E. H. (1994). An efficientcontroller for an adjustable speed induction motor drive. IEEE Transactions onIndustrial Electronics, 41(5):533–539.García Cerrada, A. (1991). Observer-based field-oriented controller for an inverter-fedtraction induction motor drive. PhD thesis, University of Birmingham (U.K.).García González, P. (2000). Mo<strong>de</strong>lado control y aplicación <strong>de</strong> dispositivos FACTS basadosen inversores fuente <strong>de</strong> tensión. PhD thesis, Universidad Pontificia Comillas.García González, P. y García Cerrada, A. (1998). <strong>Control</strong> system for a UPFC in a transmissionline. In IECON, pp 462–466, Aachen.García-Cerrada, A. y Zamora, J. (1997). On-line rotor-resistance estimation for inductionmotors. In Proc. of the European Power Electronics Conf. (EPE’97), volume 1, pp542–547. EPE.García-Cerrada, A., Zazo, A., Suárez, M., Suárez, T., y Zamora, J. (1994). Recursiveestimation of mo<strong>de</strong>l parameters and state variables for induction motors. In InternationalConference on Electrical Machines., volume 3, pp 397–402. ICEM.Gök<strong>de</strong>re, L. U. y Simaan, M. A. (1997). A passivity-based method for induction motorcontrol. IEEE Transactions on Industrial Electronics, 44(5):688–695.Holtz, J. (1994). Pulsewidth modulation for electronic power conversion. Proceedings ofthe IEEE, 82(8):1194–1214.Huffel, V. y Van<strong>de</strong>walle (1991). The total least squares problem. computational aspectsand analysis. In SIAM, Phila<strong>de</strong>lphia.IEEE (1995). Standarized Application Environment Profile–Posix Realtime ApplicationSupport (AEP) (Draft 7) P1003.13/D7. IEEE.Infineon Technologies (1999). C166 Family of High-Performance CMOS 16-bit Microcontrollers.Infineon Technologies AG, München, 1999-08 edition.Isidori, A. (1995). Nonlinear <strong>Control</strong> Systems. Communications and <strong>Control</strong> EngineeringSeries. Springer-Verlag, London, third edition.Kailath, T. (1980). Linear Systems. Information and System Sciences Series. PrenticeHall Inc., Englewood Cliffs, N.J.
Bibliografía 169Keithley (1993). DAS-1400 Series user’s gui<strong>de</strong>. Keithley Instruments, Inc., Cleveland,Ohio.Khalil (1996). Nonlinear Systems. Prentice-Hall, Upper Saddle River, NJ, second edition.Kothare, M. V., Campo, P. J., Morari, M., y Nett, C. N. (1994). A unified framework forthe study of anti-windup <strong>de</strong>signs. Automatica, 30(12):1869–1883.Krause, P. C. (1986). Analysis of Electric Machinery. McGraw-Hill Inc., New York.Lamport, L. (1994). LATEX, A document Preparation System. User’s Gui<strong>de</strong> and ReferenceManual. Addison-Wesley, 2 ε edition.Leonhard, W. (1985). <strong>Control</strong> of Electrical Drives. Springer-Verlag, Berlin.Leonhard, W. (1990). <strong>Control</strong> of Electrical Drives. Springer-Verlag, Berlin.Mantegazza, P., Bianchi, E., Dozio, L., Papacharacambous, S., Hughes, S., y Beal, D.(2000). RTAI: Real-time application interface. Linux Journal, (72).Marino, R., Peresada, S., y Tomei, P. (1995). Exponentially convergent rotor resistanceestimation for induction motors. IEEE Transactions on Industrial Electronics,42(5):508–515.Marino, R., Peresada, S., y Tomei, P. (1996). Output feedback control of current-fedinduction motors with unknown rotor resistance. IEEE Transactions on <strong>Control</strong>Systems Technology, 4(4):336–347.Marino, R., Peresada, S., y Valigi, P. (1993). Adaptive input–output linearizing controlof induction motors. IEEE Transactions on Automatic <strong>Control</strong>, 38(2):208–221.Mårtensson, B. (1994). Gnans. A Program for Stochastic and Deterministic DynamicalSystems. Reference Manual, 0.96 edition.Mohan, N., Un<strong>de</strong>land, T., y Robbins, W. (1995). Power Electronics: Converters, Applicationsand Design. 2nd edition. John Wiley and Sons, Inc, New York.Muñoz Frías, J. D., Riehl, J. S., García Cerrada, A., Rodríguez Mondéjar, J. A., y ZamoraMacho, J. L. (1997). Diseño en vhdl para la estimación <strong>de</strong> velocidad <strong>de</strong> un motor<strong>de</strong> inducción. In Seminario Anual <strong>de</strong> Automática, Electrónica industrial e Instrumentación.Murphy, J. M. D. y Turnbull, F. G. (1988). Power Electronics <strong>Control</strong> of A. C. Motors.Pergamon Press.Ortega, R. y Espinosa, G. (1993). Torque regulation of induction motors. Automatica,29(3):621–633.Pagola, F. L. (1994). Apuntes <strong>de</strong> <strong>Control</strong> Digital. Universidad Pontificia Comillas,Madrid.Raumer, T., Dion, J. M., Dugard, L., y Thomas, J. L. (1994). Applied nonlinear control ofan induction motor using digital signal processing. IEEE Transactions on <strong>Control</strong>Systems Technology, 2(4):327–335.
170 BibliografíaRobertson, A. (1999). Adaptive <strong>Control</strong> of Induction Motors. PhD thesis, UniversidadPontificia Comillas.San<strong>de</strong>rs, S. R. y Verghese, G. C. (1992). Lyapunov-based control for switched powerconverters. IEEE Transactions on Power Electronics, 7(1):17–24.Semikron (1999). Power Electronics 99. Semikron International, Nürnberg.Shanley, T. y An<strong>de</strong>rson, D. (1995). ISA System Architecture 3 Ed. PC System ArchitectureSeries. Addison Wesley.Shyu, K.-K. y Shieh, H.-J. (1995). Variable structure current control for induction motordrives by space voltage vector PWM. IEEE Transactions on Industrial Electronics,42(6):572–578.Shyu, K.-K., Shieh, H.-J., y Fu, S.-S. (1998). Mo<strong>de</strong>l reference adaptive speed controlfor induction motor drive using neural networks. IEEE Transactions on IndustrialElectronics, 45(1):180–182.Slotine, J.-J. E. y Li, W. (1991). Applied Nonlinear <strong>Control</strong>. Prentice-Hall, New Jersey.Taylor, D. G. (1994). Nonlinear control of electric machines: An overview. IEEE <strong>Control</strong>Systems, pp 41–51.Texas Instruments (1998). TMS320C240, TMS320F240 DSP controllers data sheet.Texas Instruments, Houston, Texas.Tzou, Y.-Y. (1996). DSP-Based robust control of an AC induction servo drive for motioncontrol. IEEE Transactions on <strong>Control</strong> Systems Technology, 4(6):614–626.Tzou, Y.-Y. y Hsu, H.-J. (1997). FPGA realization of space-vector PWM control IC forthree-pase PWM inverters. IEEE Transactions on Power Electronics, 12(6):953–963.Vas, P. (1998). Sensorless Vector and Direct Torque <strong>Control</strong>. Number 42 in Monographsin electrical and electronic engineering. Oxford University Press, Great ClarendonStreet, Oxford.Verghese, G. C. y San<strong>de</strong>rs, S. R. (1988). Observers for flux estimation in inductionmachines. IEEE Transactions on Industrial Electronics, 35(1):85–94.Xilinx (1999). XC4000E and XC4000X Series Field Programmable Gate Arrays. Xilinx,Inc., San José, CA.Zamora Macho, J. (1997). Estimación en tiempo real <strong>de</strong> parámetros y variables <strong>de</strong> estadoen un motor <strong>de</strong> inducción. PhD thesis, Universidad Pontificia Comillas.Zhou, K. y Doyle, J. C. (1998). Essentials of Robust <strong>Control</strong>. Prentice Hall International.