
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
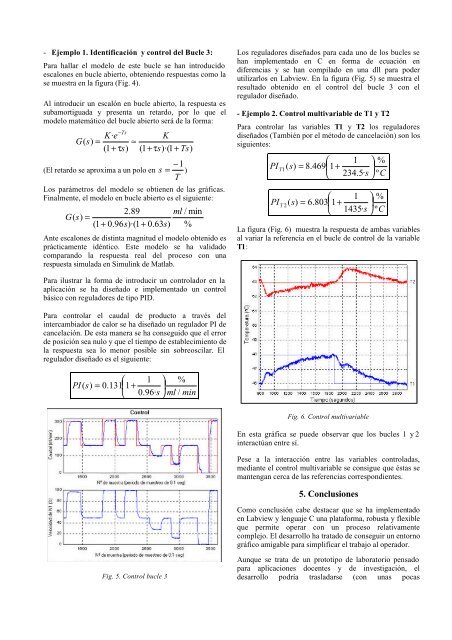
- Ejemplo 1. Identificación y control del Bucle 3:Para hallar el modelo de este bucle se han introducidoescalones en bucle abierto, obteniendo respuestas como lase muestra en la figura (Fig. 4).Al introducir un escalón en bucle abierto, la respuesta essubamortiguada y presenta un retardo, por lo que elmodelo matemático del bucle abierto será de la forma:−TsK·e KG(s)= ≈(1 + τs)(1 + τs)·(1+ Ts)−1(El retardo se aproxima a un polo en s = )TLos parámetros del modelo se obtienen de las gráficas.Finalmente, el modelo en bucle abierto es el siguiente:2.89 mlG(s)=(1 + 0.96s)·(1+ 0.63s)/ min%Ante escalones de distinta magnitud el modelo obtenido esprácticamente idéntico. Este modelo se ha validadocomparando la respuesta real del proceso con unarespuesta simulada en Simulink de Matlab.Los reguladores diseñados para cada uno de los bucles sehan implementado en C en forma de ecuación endiferencias y se han compilado en una dll para poderutilizarlos en Labview. <strong>En</strong> la figura (Fig. 5) se muestra elresultado obtenido en el control del bucle 3 con elregulador diseñado.- Ejemplo 2. <strong>Control</strong> multivariable de T1 y T2Para controlar las variables T1 y T2 los reguladoresdiseñados (También por el método de cancelación) son lossiguientes:PI ⎛ 1 ⎞ %s T 1() = 8.469⎜1+ ⎟⎝ 234.5· s ⎠ º CPI ⎛ 1 ⎞ %s T 2() = 6.803⎜1+ ⎟⎝ 1435· s ⎠ º CLa figura (Fig. 6) muestra la respuesta de ambas variablesal variar la referencia en el bucle de control de la variableT1:Para ilustrar la forma de introducir un controlador en laaplicación se ha diseñado e implementado un controlbásico con reguladores de tipo PID.Para controlar el caudal de producto a través delintercambiador de calor se ha diseñado un regulador PI decancelación. De esta manera se ha conseguido que el errorde posición sea nulo y que el tiempo de establecimiento dela respuesta sea lo menor posible sin sobreoscilar. Elregulador diseñado es el siguiente:⎛ 1 ⎞ %PI ( s)= 0.131⎜1+ ⎟⎝ 0.96· s ⎠ ml / minFig. 6. <strong>Control</strong> multivariable<strong>En</strong> esta gráfica se puede observar que los bucles 1 y 2interactúan entre sí.Pese a la interacción entre las variables controladas,mediante el control multivariable se consigue que éstas semantengan cerca de las referencias correspondientes.5. ConclusionesComo conclusión cabe destacar que se ha implementadoen Labview y lenguaje C una plataforma, robusta y flexibleque permite operar con un proceso relativamentecomplejo. El desarrollo ha tratado de conseguir un entornográfico amigable para simplificar el trabajo al operador.Fig. 5. <strong>Control</strong> bucle 3Aunque se trata de un prototipo de laboratorio pensadopara aplicaciones docentes y de investigación, eldesarrollo podría trasladarse (con unas pocas