Säätötekniikan perusteet
Säätötekniikan perusteet
Säätötekniikan perusteet
SHOW LESS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
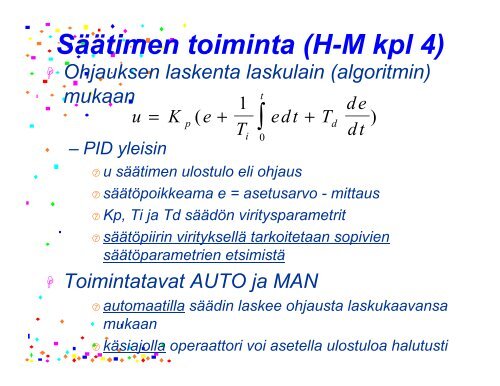
Säätimen toiminta (H-M kpl 4) Ohjauksen laskenta laskulain (algoritmin)mukaan1u = K e edt T dep( + ∫ +d)Tidt0– PID yleisin u säätimen ulostulo eli ohjaus säätöpoikkeama e = asetusarvo - mittaus Kp, Ti ja Td säädön viritysparametrit säätöpiirin virityksellä tarkoitetaan sopiviensäätöparametrien etsimistä Toimintatavat AUTO ja MANt automaatilla säädin laskee ohjausta laskukaavansamukaan käsiajolla operaattori voi asetella ulostuloa halutusti