

Conception et réalisation d'un syst`eme d'instrumentation ... - CoDE
Conception et réalisation d'un syst`eme d'instrumentation ... - CoDE
Conception et réalisation d'un syst`eme d'instrumentation ... - CoDE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3.3. RMI<br />
A cat instance<br />
Animal<br />
Cat<br />
A cat instance<br />
Animal<br />
Cat<br />
Client Server<br />
Marshalling Marshalling<br />
Client<br />
Dynamic Stub Invocation<br />
ORB<br />
HTTP upload of<br />
Cat’ s class bytecode<br />
RMIbus RMIbus<br />
IIOP<br />
Server<br />
Dynamic Skel<strong>et</strong>on Invocation<br />
ORB<br />
A cat instance<br />
Cat<br />
An Animal Instance<br />
Animal<br />
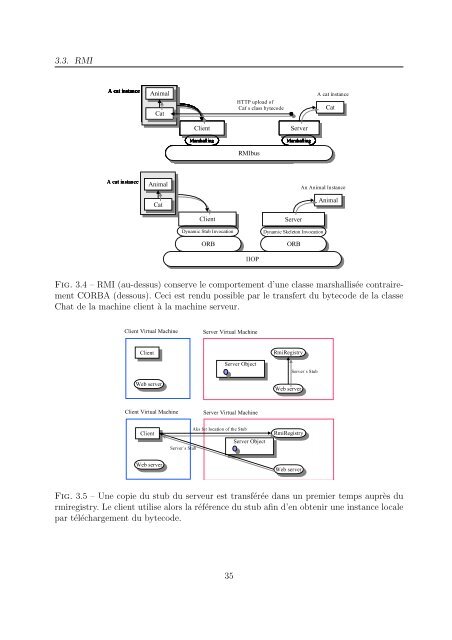
Fig. 3.4 – RMI (au-dessus) conserve le comportement d’une classe marshallisée contrairement<br />
CORBA (dessous). Ceci est rendu possible par le transfert du bytecode de la classe<br />
Chat de la machine client à la machine serveur.<br />
Client Virtual Machine Server Virtual Machine<br />
Client<br />
Web server<br />
Server Object<br />
Client Virtual Machine Server Virtual Machine<br />
Client<br />
Web server<br />
Server’ s Stub<br />
Aks for location of the Stub<br />
Server Object<br />
RmiRegistry<br />
Web server<br />
RmiRegistry<br />
Web server<br />
Server’ s Stub<br />
Fig. 3.5 – Une copie du stub du serveur est transférée dans un premier temps auprès du<br />
rmiregistry. Le client utilise alors la référence du stub afin d’en obtenir une instance locale<br />
par téléchargement du bytecode.<br />
35













