Documentation Tiny POB-PROTO - Farnell
Documentation Tiny POB-PROTO - Farnell
Documentation Tiny POB-PROTO - Farnell

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong>
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
Sommaire<br />
1 TINY <strong>POB</strong>-<strong>PROTO</strong>................................................................................................................ 4<br />
2 DESCRIPTION DES ELEMENTS DE LA CARTE................................................................. 5<br />
Dimension ......................................................................................................................................... 5<br />
Alimentation ...................................................................................................................................... 6<br />
Connexion de la carte avec le <strong>POB</strong>-EYE..................................................................................... 7<br />
Connexion des Servomoteurs........................................................................................................ 7<br />
Entrées/Sorties................................................................................................................................. 8<br />
Utilisation des entrées/sorties ........................................................................................................ 8<br />
Bus I2C .............................................................................................................................................. 9<br />
3 UTILISER LA CARTE TINY <strong>POB</strong>-<strong>PROTO</strong> AVEC LE <strong>POB</strong>-EYE ........................................ 10<br />
Exemple 1 ....................................................................................................................................... 10<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 2 / 12
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
Gestion du document<br />
Nom de fichier Manuel_tiny_pob_proto_FR.doc<br />
Date de création 18.10.06<br />
Auteur <strong>POB</strong>-Technology<br />
Contacter <strong>POB</strong>-Technology<br />
Adresse <strong>POB</strong>-TECHNOLOGY<br />
4, rue nicéphore niépce<br />
69 680 CHASSIEU, FRANCE<br />
Adresse mail contact@pob-technology.com<br />
Téléphone +33 (0)4 72 43 02 36<br />
Fax +33 (0)4 78 58 04 92<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 3 / 12
1 <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong><br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
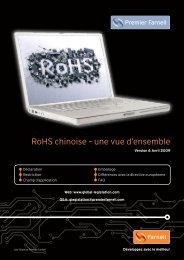
La carte « <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> » est un périphérique destinée au <strong>POB</strong>-EYE. Cette carte se<br />
présente comme une carte « allégée » <strong>POB</strong>-<strong>PROTO</strong>, elle est plus petite et ne possède pas de<br />
partie puissance.<br />
La <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> peut piloter 6 servomoteurs, dispose de 20 entrées/sorties, du bus I2C<br />
du <strong>POB</strong>-EYE et d’un champ de pastille libre pour l’utilisateur.<br />
Schéma général de la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> :<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 4 / 12
2 Description des éléments de la carte<br />
Dimension<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 5 / 12
Alimentation<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
- Alimentation de la carte : l’alimentation de la carte doit être comprise entre 6V et 12V. Il<br />
existe deux façons d’alimenter la carte :<br />
o Par le connecteur dédié, la mise sous tension se fait par le câble d’alimentation et<br />
l’interrupteur « On/Off ».<br />
o Par le connecteur HE10, les broches 1 (+Alimentation) et 20 (Masse) du<br />
connecteur permettent d’alimenter la carte avec une autre carte de <strong>POB</strong>-<br />
Technology.<br />
<strong>POB</strong>-Servo et <strong>POB</strong>-<strong>PROTO</strong> peuvent alimenter la <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> par le<br />
connecteur HE10.<br />
Attention : Si vous choisissez d’alimenter la <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> par le connecteur HE10,<br />
n’utilisez pas le connecteur d’alimentation dédié.<br />
- Alimentation des servomoteurs :<br />
L’alimentation des servomoteurs se fait par le bornier bleu : la tension dépend de l’alimentation<br />
des moteurs que vous branchez.<br />
Attention : L’alimentation des servomoteurs par le bornier est commune à tous : vous devez<br />
avoir des servomoteurs ayant la même tension d’alimentation.<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 6 / 12
Connexion de la carte avec le <strong>POB</strong>-EYE<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
La connexion de la <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> avec le <strong>POB</strong>-EYE se fait par le <strong>POB</strong>-BUS présent sur<br />
le connecteur HE10.<br />
Il suffit de relier simplement la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> et la carte <strong>POB</strong>-EYE avec le câble :<br />
Connexion des Servomoteurs<br />
La carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> peut piloter un maximum de 6 servomoteurs. Les signaux<br />
présents sur un connecteur servomoteur sont les suivants :<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 7 / 12
Entrées/Sorties<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
Le connecteur d’entrées sorties dispose de 20 entrées/sorties libre pour connecter capteurs,<br />
joystick…<br />
Les entrées/sorties et les signaux présents sur le connecteur sont les suivants :<br />
Remarque :<br />
Les 6 servomoteurs utilisent RC0, RC1, RC2, RC3, RC4, RC6, RC7 pour le pilotage.<br />
Utilisation des entrées/sorties<br />
Les broches RC0, RC1, RC2, RC3, RC4, RC6 et RC7 peuvent être utilisé :<br />
- en port d’entrées/sortie et pour piloter des servomoteurs.<br />
- Attention : un port RC ne peut être utilisé en tant que servomoteur et en même temps en<br />
tant qu’entrée/sortie !<br />
Les broches RA0, RA1, RA2, RA3, RA4 et RA5 peuvent être configurées :<br />
- en entrées/sorties.<br />
- en analogique. Attention, lorsque vous configurer le port RA en port analogique, vous ne<br />
pouvez plus utiliser un des ports RA en entrées/sorties !<br />
Les broches RD0, RD1, RD2, RD3, RD4, RD5, RD6 et RD7 peuvent être configurées :<br />
- en entrées/sorties.<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 8 / 12
Bus I2C<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
Le bus I2C sur la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> est relié au bus I2C du <strong>POB</strong>-EYE. Le <strong>POB</strong>-EYE<br />
est maître sur le bus I2C. Les résistances de Pull-Up sont déjà présentes.<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 9 / 12
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
3 Utiliser la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> avec le <strong>POB</strong>-EYE<br />
L’ensemble de la documentation <strong>POB</strong>-EYE est accessible sur notre site Internet:<br />
www.pob-technology.com/api/c/index.html pour les fonctions C du <strong>POB</strong>-EYE.<br />
Pour utiliser la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> (ou la carte <strong>POB</strong>-<strong>PROTO</strong>), vous pouvez trouver les<br />
fonctions sur ce lien : http://pob-technology.com/api/c/pob-proto_8h.html<br />
http://www.pob-technology.com/blog/index.php?<strong>Documentation</strong>s pour retrouver toute la<br />
documentation <strong>POB</strong>-Technology.<br />
Par rapport à la carte <strong>POB</strong>-<strong>PROTO</strong>, il faut initialiser la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> avec la<br />
fonction « Set<strong>Tiny</strong>PobProto » au lieu de « SetPobProto ».<br />
Toutes les fonctions <strong>POB</strong>-<strong>PROTO</strong> peuvent être utilisé !<br />
Exemple 1<br />
Initialisation de la carte <strong>Tiny</strong> <strong>POB</strong>-<strong>PROTO</strong> pour utiliser des servomoteurs sur RC0,…RC7 et<br />
pilotage des servomoteurs.<br />
#include <br />
int main(void)<br />
{<br />
UInt8 i=0;<br />
PobProto configuration;<br />
Init<strong>POB</strong>EYE();<br />
configuration.portc = RC7_AS_SERVO | RC6_AS_SERVO |RC3_AS_SERVO |<br />
RC2_AS_SERVO|RC1_AS_SERVO |RC0_AS_SERVO;<br />
Set<strong>Tiny</strong>PobProto(&configuration);<br />
while(1)<br />
{<br />
for(i=0 ; i< 6 ; i++ )<br />
SetServoMotor(i,1);<br />
Wait(400000);<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 10 / 12
}<br />
for(i=0 ; i< 6 ; i++ )<br />
SetServoMotor(i,255);<br />
Wait(400000);<br />
}<br />
return 0;<br />
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 11 / 12
Constructeur de Robots<br />
Pour les Loisirs Innovants et Pour l’Enseignement<br />
<strong>Documentation</strong> <strong>Tiny</strong> <strong>POB</strong>-Proto<br />
Contacter <strong>POB</strong>-Technology<br />
<strong>POB</strong>-TECHNOLOGY<br />
4, rue nicéphore niépce<br />
69 680 CHASSIEU<br />
FRANCE<br />
Adresse web : www.pob-technology.com<br />
Adresse mail : contact@pob-technology.com<br />
Téléphone : +33 (0)4 72 43 02 36<br />
Fax : +33 (0)4 78 58 04 92<br />
<strong>POB</strong>-Technology – Tous droits Réservés Page 12 / 12

![Microchip Signal Chain Design Guide [pdf] - Farnell](https://img.yumpu.com/19262401/1/190x245/microchip-signal-chain-design-guide-pdf-farnell.jpg?quality=85)