notice - Graupner
notice - Graupner
notice - Graupner

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Remarques:<br />
• Lors de la programmation, veillez à ce que les<br />
moteurs électriques ne peuvent pas démarrer<br />
par inadvertance ou si vous avez un moteur thermique<br />
avec démarrage automatique, que celui ne<br />
puisse pas démarrer tout seul. Par mesure de sécurité,<br />
débranchez toujours l’accu de propulsion<br />
et coupez l’alimentation carburant s’il s’agit d’un<br />
moteur thermique.<br />
Configuration Empennage<br />
La confi guration de l‘empennage est sélectionnée, avec<br />
le Jumper fourni, au niveau des barrettes de contact<br />
„MIX“ sur le devant de l‘émetteur.<br />
Sélectionnez le type correspond à votre modèle en<br />
positionnant le Jumper en conséquence.<br />
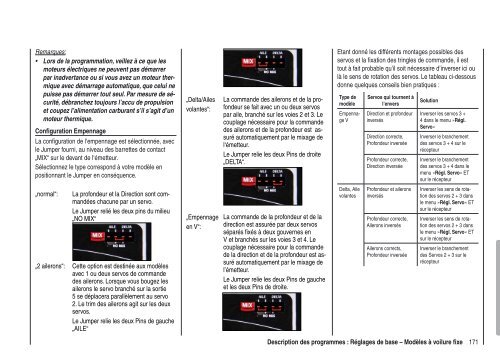
„Delta/Ailes<br />
volantes“:<br />
La commande des ailerons et de la profondeur<br />
se fait avec un ou deux servos<br />
par aile, branché sur les voies 2 et 3. Le<br />
couplage nécessaire pour la commande<br />
des ailerons et de la profondeur est assuré<br />
automatiquement par le mixage de<br />
l‘émetteur.<br />
Le Jumper relie les deux Pins de droite<br />
„DELTA“.<br />
Etant donné les différents montages possibles des<br />
servos et la fi xation des tringles de commande, il est<br />
tout à fait probable qu’il soit nécessaire d’inverser ici ou<br />
là le sens de rotation des servos. Le tableau ci-dessous<br />
donne quelques conseils bien pratiques :<br />
Type de<br />
modèle<br />
Empennage<br />
V<br />
Servos qui tournent à<br />
l’envers<br />
Direction et profondeur<br />
inversés<br />
Direction correcte,<br />
Profondeur inversée<br />
Profondeur correcte,<br />
Direction inversée<br />
Solution<br />
Inverser les servos 3 +<br />
4 dans le menu »Régl.<br />
Servo«<br />
Inverser le branchement<br />
des servos 3 + 4 sur le<br />
récepteur<br />
Inverser le branchement<br />
des servos 3 + 4 dans le<br />
menu »Régl. Servo« ET<br />
sur le récepteur<br />
„normal“:<br />
La profondeur et la Direction sont commandées<br />
chacune par un servo.<br />
Le Jumper relié les deux pins du milieu<br />
„NO MIX“<br />
„2 ailerons“: Cette option est destinée aux modèles<br />
avec 1 ou deux servos de commande<br />
des ailerons. Lorsque vous bougez les<br />
ailerons le servo branché sur la sortie<br />
5 se déplacera parallèlement au servo<br />
2. Le trim des ailerons agit sur les deux<br />
servos.<br />
Le Jumper relie les deux Pins de gauche<br />
„AILE“<br />
„Empennage<br />
en V“:<br />
La commande de la profondeur et de la<br />
direction est assurée par deux servos<br />
séparés fi xés à deux gouvernes en<br />
V et branchés sur les voies 3 et 4. Le<br />
couplage nécessaire pour la commande<br />
de la direction et de la profondeur est assuré<br />
automatiquement par le mixage de<br />
l’émetteur.<br />
Le Jumper relie les deux Pins de gauche<br />
et les deux Pins de droite.<br />
Delta, Aile<br />
volantes<br />
Profondeur et ailerons<br />
inversés<br />
Profondeur correcte,<br />
Ailerons inversés<br />
Ailerons corrects,<br />
Profondeur inversée<br />
Inverser les sens de rotation<br />
des servos 2 + 3 dans<br />
le menu »Régl. Servo« ET<br />
sur le récepteur<br />
Inverser les sens de rotation<br />
des servos 2 + 3 dans<br />
le menu »Régl. Servo« ET<br />
sur le récepteur<br />
Inverser le branchement<br />
des Servos 2 + 3 sur le<br />
récepteur<br />
Description des programmes : Réglages de base – Modèles à voilure fixe<br />
171