notice - Graupner
notice - Graupner
notice - Graupner

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Rahmen der erlaubten Temperaturen Ihres Empfängers<br />
zu bleiben (idealerweise zwischen -10 und 55 °C).<br />
Die Empfänger-Temperaturgrenzwerte, ab denen eine<br />
Warnung erfolgt, können im Untermenü »RX SER-<br />
VO TEST« unter „ALARM TEMP+“ (50 … 80 °C und<br />
„ALARM TEMP-“ (-20 … +10 °C) eingestellt werden.<br />
Bei Unter- oder Überschreitung erfolgt ein akustisches<br />
Signal (Dauer-Piepton) und in allen Empfänger-<br />
Untermenüs „RX“ erscheint oben rechts „TEMP.E“. Auf<br />
der Display-Seite »RX DATAVIEW« wird außerdem der<br />
Parameter „R-TEM“ invers dargestellt.<br />
Datenpakete (L PACK TIME)<br />
Zeigt den längsten Zeitraum in ms an, in dem Datenpakete<br />
bei der Übertragung vom Sender zum Empfänger<br />
verloren gegangen sind. In der Praxis ist das der längste<br />
Zeitraum, in dem das Fernsteuersytem in den Fail-Safe-<br />
Modus gegangen ist.<br />
Betriebsspannung (R-VOLT)<br />
Kontrollieren Sie immer die Betriebsspannung des Empfängers.<br />
Sollte sie zu niedrig sein, dürfen Sie Ihr Modell<br />
auf keinen Fall weiter betreiben bzw. überhaupt starten.<br />
Die Empfänger-Unterspannungswarnung kann im<br />
Untermenü »RX SERVO TEST« unter „ALARM VOLT“<br />
zwischen 3,0 und 6,0 Volt eingestellt werden. Bei<br />
Unterschreitung erfolgt ein akustisches Signal (sich<br />
wiederholender Doppel-Piepton (lang/kurz)) und in allen<br />
Empfänger-Untermenüs »RX …« erscheint oben rechts<br />
„VOLT.E“. Im Untermenü »RX DATAVIEW« wird außerdem<br />
der Parameter „R-VOLT“ invers dargestellt.<br />
Die aktuelle Empfängerakkuspannung wird auch im<br />
Grunddisplay, siehe Seite 24, angezeigt.<br />
48 Programmbeschreibung: Telemetrie<br />
Minimale Betriebsspannung (L.R-VOLT)<br />
„L.R-VOLT“ zeigt die minimale Betriebsspannung des<br />
Empfängers seit dem letzten Einschalten an.<br />
Sollte diese Spannung deutlich von der aktuellen<br />
Betriebsspannung „R-VOLT“ abweichen, wird der<br />
Empfängerakku durch die Servos möglicherweise zu<br />
stark belastet. Spannungseinbrüche sind die Folge.<br />
Verwenden Sie in diesem Fall eine leistungsfähigere<br />
Spannungsversorgung, um maximale Betriebssicherheit<br />
zu erreichen.<br />
Sensor 1 + 2<br />
Zeigt die Werte des optionalen Telemetrie-Sensors 1<br />
und ggf. 2 in Volt und °C an. Eine Beschreibung dieser<br />
Sensoren ist im Anhang zu fi nden.<br />
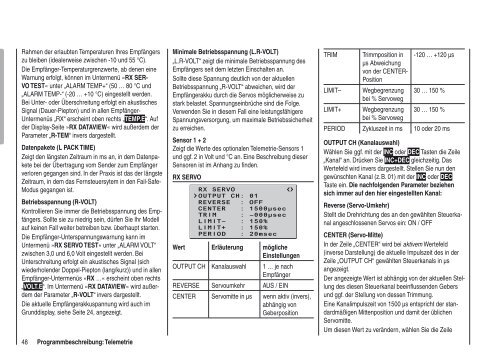
RX SERVO<br />
RX SERVO<br />
OUTPUT CH: 01<br />
REVERSE : OFF<br />
CENTER : 1500sec<br />
TRIM : –000sec<br />
LIMIT– : 150%<br />
LIMIT+ : 150%<br />
PERIOD : 20msec<br />
Wert Erläuterung mögliche<br />
Einstellungen<br />
OUTPUT CH Kanalauswahl 1 … je nach<br />
Empfänger<br />
REVERSE Servoumkehr AUS / EIN<br />
CENTER Servomitte in μs wenn aktiv (invers),<br />
abhängig von<br />
Geberposition<br />
TRIM<br />
Trimmposition in<br />
μs Abweichung<br />
von der CENTER-<br />
Position<br />
-120 … +120 μs<br />
LIMIT– Wegbegrenzung 30 … 150 %<br />
bei % Servoweg<br />
LIMIT+ Wegbegrenzung 30 … 150 %<br />
bei % Servoweg<br />
PERIOD Zykluszeit in ms 10 oder 20 ms<br />
OUTPUT CH (Kanalauswahl)<br />
Wählen Sie ggf. mit der INC oder DEC Tasten die Zeile<br />
„Kanal“ an. Drücken Sie INC+DEC gleichzeitig. Das<br />
Wertefeld wird invers dargestellt. Stellen Sie nun den<br />
gewünschten Kanal (z. B. 01) mit der INC oder DEC<br />
Taste ein. Die nachfolgenden Parameter beziehen<br />
sich immer auf den hier eingestellten Kanal:<br />
Reverse (Servo-Umkehr)<br />
Stellt die Drehrichtung des an den gewählten Steuerkanal<br />
angeschlossenen Servos ein: ON / OFF<br />
CENTER (Servo-Mitte)<br />
In der Zeile „CENTER“ wird bei aktivem Wertefeld<br />
(inverse Darstellung) die aktuelle Impulszeit des in der<br />
Zeile „OUTPUT CH“ gewählten Steuerkanals in μs<br />
angezeigt.<br />
Der angezeigte Wert ist abhängig von der aktuellen Stellung<br />
des diesen Steuerkanal beeinfl ussenden Gebers<br />
und ggf. der Stellung von dessen Trimmung.<br />
Eine Kanalimpulszeit von 1500 μs entspricht der standardmäßigen<br />
Mittenposition und damit der üblichen<br />
Servomitte.<br />
Um diesen Wert zu verändern, wählen Sie die Zeile