

Liste des Projets de Fin d'Etudes Automatique (Ingenieur)
Liste des Projets de Fin d'Etudes Automatique (Ingenieur)
Liste des Projets de Fin d'Etudes Automatique (Ingenieur)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
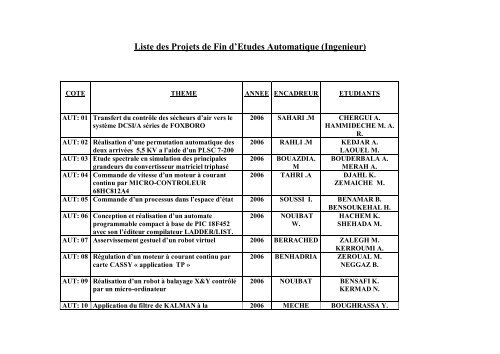
<strong>Liste</strong> <strong><strong>de</strong>s</strong> <strong>Projets</strong> <strong>de</strong> <strong>Fin</strong> d’Etu<strong><strong>de</strong>s</strong> <strong>Automatique</strong> (<strong>Ingenieur</strong>)<br />
COTE THEME ANNEE ENCADREUR ETUDIANTS<br />
AUT: 01 Transfert du contrôle <strong><strong>de</strong>s</strong> sécheurs d’air vers le<br />
système DCSI/A séries <strong>de</strong> FOXBORO<br />
2006 SAHARI .M CHERGUI A.<br />
HAMMIDECHE M. A.<br />
R.<br />
2006 RAHLI .M KEDJAR A.<br />
LAOUEL M.<br />
2006 BOUAZDIA. BOUDERBALA A.<br />
AUT: 02 Réalisation d’une permutation automatique <strong><strong>de</strong>s</strong><br />
<strong>de</strong>ux arrivées 5,5 KV a l’ai<strong>de</strong> d’un PLSC 7-200<br />
AUT: 03 Etu<strong>de</strong> spectrale en simulation <strong><strong>de</strong>s</strong> principales<br />
gran<strong>de</strong>urs du convertisseur matriciel triphasé<br />
M<br />
MERAH A.<br />
AUT: 04 Comman<strong>de</strong> <strong>de</strong> vitesse d’un moteur à courant 2006 TAHRI .A DJAHL K.<br />
continu par MICRO-CONTROLEUR<br />
ZEMAICHE M.<br />
68HC812A4<br />
AUT: 05 Comman<strong>de</strong> d’un processus dans l’espace d’état 2006 SOUSSI I. BENAMAR B.<br />
BENSOUKEHAL H.<br />
AUT: 06 Conception et réalisation d’un automate<br />
2006 NOUIBAT HACHEM K.<br />
programmable compact à base <strong>de</strong> PIC 18F452<br />
W.<br />
SHEHADA M.<br />
avec son l’éditeur compilateur LADDER/LIST.<br />
AUT: 07 Asservissement gestuel d’un robot virtuel 2006 BERRACHED ZALEGH M.<br />
KERROUMI A.<br />
AUT: 08 Régulation d’un moteur à courant continu par<br />
carte CASSY « application TP »<br />
2006 BENHADRIA ZEROUAL M.<br />
NEGGAZ B.<br />
AUT: 09 Réalisation d’un robot à balayage X&Y contrôlé<br />
par un micro-ordinateur<br />
2006 NOUIBAT BENSAFI K.<br />
KERMAD N.<br />
AUT: 10 Application du filtre <strong>de</strong> KALMAN à la 2006 MECHE BOUGHRASSA Y.
comman<strong>de</strong> d’un moteur à courant continu GUERROUDJ N.<br />
AUT: 11 Automatisation <strong><strong>de</strong>s</strong> systèmes <strong><strong>de</strong>s</strong> sécurité <strong><strong>de</strong>s</strong> bacs<br />
GNL et fosse <strong><strong>de</strong>s</strong> pompes par un automate<br />
2006 BOUHAMIDA KANN RACHID<br />
BOUHAMIDA N.<br />
programmable type triconex<br />
AUT: 12 Comman<strong>de</strong> <strong>de</strong> température par MICRO- 2006 TAHRI MEGUEDAD F. A.<br />
CONTREULEURE PIC16F877<br />
AUT: 13 Conception et réalisation d’un logiciel LADDER<br />
–GRAFCET pour automate programmable à<br />
base d’un microcontrôleur 18F452<br />
AUT: 14 Réalisation d’une carte <strong>de</strong> comman<strong>de</strong> pour le<br />
bras manipulateur CYBOT<br />
AUT: 15 Comman<strong>de</strong> <strong>de</strong> l’ensemble onduleur <strong>de</strong> tensionmachine<br />
asynchrone<br />
AFEISSA A. B.<br />
2006 NOUIBAT KESSER M.<br />
ABDELOUAHED A.<br />
2006 BENDJABBA<br />
R<br />
2006 BENCHERIF<br />
KADDOUR<br />
KRIBI ALI<br />
MOUFOK S. A.<br />
MEDJDOUB S. M.<br />
BOUAMOUD A.<br />
AUT: 16 Conception et réalisation d’un onduleur<br />
monophasé <strong><strong>de</strong>s</strong>tiné à un système photovoltaïque<br />
autonome<br />
AUT: 17 Etu<strong>de</strong> et réalisation d’un dispositif <strong>de</strong><br />
caractérisation <strong><strong>de</strong>s</strong> états <strong>de</strong> surfaces<br />
surfascan<br />
AUT: 18 Modélisation <strong><strong>de</strong>s</strong> défauts d’un moteur<br />
asynchrone par analyse vibratoire<br />
AUT: 19 La mesure et l’analyse vibratoire d’un moteur<br />
asynchrone<br />
AUT: 20 Comman<strong>de</strong> adaptative linéarisante d’une<br />
machine asynchrone<br />
2006 KHIAT Z. BENADJAIMIA H<br />
MOKHTARI A.<br />
2006 LOUNIS CHERGUIOUL S.<br />
DALI YOUCEF M. S.<br />
2006 BELALIA D. GHEMARI M.<br />
FATAH M.<br />
2006 BELALIA D. HOUACHE B.<br />
HASSANI F.<br />
2006 BENDAHA HOCINE S.<br />
TELLAB M. I.<br />
AUT: 21 Etu<strong>de</strong> et réalisation d’un système <strong>de</strong> télémesure<br />
<strong>de</strong> température<br />
2006 BENMOUSSA<br />
T<br />
BOUDRA S.<br />
GHALEM H. R.<br />
AUT: 22 Stabilisation d’un microsatellite par mat <strong>de</strong><br />
grabité<br />
2006 BEKHTI M. TAHIDOUSTI M.<br />
BENAMAR M.
AUT: 23 Conception <strong>de</strong> quatre régulateurs par logique<br />
floue pour la comman<strong>de</strong> vectorielle directe a flux<br />
rotorique orienté du moteur asynchrone<br />
AUT: 24 Elimination <strong><strong>de</strong>s</strong> interférences Multi-Utilisateurs<br />
dans le réseau UMTS<br />
AUT: 25 Etu<strong>de</strong> d’un groupe électrogène à pile à<br />
combustible<br />
AUT: 26 Exploitation d’une carte analyseur OR24 pour<br />
l’analyse spectrale <strong><strong>de</strong>s</strong> vibrations<br />
2006 ZAGOUG S. HAMZA M.<br />
ZIRAR N.<br />
2006 YAHIAOUI K. BEGHDADI A.<br />
MOHAMMEDI N.<br />
2006 BERRAHI S. BELARBI<br />
Ikbal<br />
2006 YAHIAOUI SBIHI A.<br />
LAIDI Laidi<br />
AUT: 27 I<strong>de</strong>ntification du moteur pas à pas par réseaux <strong>de</strong><br />
neurones artificiels<br />
2006 ZAGOUG S.<br />
A.<br />
TEBBANI I.<br />
MOUILAH M.<br />
AUT: 28 Réparation et comman<strong>de</strong> en position et en<br />
orientation du robot MENTOR à l’ai<strong>de</strong> d’un<br />
syntaxeur<br />
AUT: 29 Comman<strong>de</strong> <strong>de</strong> moteurs pas à pas par<br />
microcontrôleur appliqué au bras manipulateur<br />
AUT: 30 Etu<strong>de</strong> et réalisation d’un réseau local a la base <strong>de</strong><br />
la norme RS485<br />
AUT: 31 Application <strong>de</strong> la logique floue a la navigation<br />
d’un robot mobile dans un environnement<br />
dynamique<br />
AUT: 32 Conception et réalisation d’un simulateur <strong>de</strong><br />
générateur photovoltaïque<br />
AUT: 33 Réalisation d’un banc d’essai automatise par<br />
LABVIEW<br />
2006 RIMA MAZARI H.<br />
BENSALEM M. A.<br />
2006 AHMED<br />
FOITIH<br />
BOURAS K.<br />
BOUDJENAN S. M.<br />
2006 DELLA<br />
SEDINI A.<br />
KRACHAI HENNOUNI M.<br />
M.<br />
2006 A. HOUARI AFFANE F.<br />
MEGUICHE Z.<br />
2006 KHIAT. Z BAGHBAGHA N.<br />
MELIANI A.<br />
2006 NOUIOUA T. KEDJAR Y.<br />
MEDEBBER A.
AUT: 34 Application <strong>de</strong> la logique floue pour la comman<strong>de</strong><br />
d’un moteur à courant continu en temps réel<br />
2006 CHAOUCH MAKHLOUF D.<br />
ELHACI M.<br />
AUT: 35 Contribution a la régulation du ballon <strong>de</strong> reflux<br />
du <strong>de</strong>butaniseur au niveau du complexe GL1/Z<br />
2006 LAROUSSI K. ZIADI NASSIMA<br />
MESLEM ROKIA<br />
AUT: 36 Réalisation d’une station <strong>de</strong> télé opération et <strong>de</strong><br />
télémétrie d’un système d’acquisition et <strong>de</strong><br />
2006 KADDOUR<br />
EL BOUDADI<br />
MOUDERES D.<br />
MOURI AHMED<br />
comman<strong>de</strong> via internent<br />
AUT: 37 Architecture comportementale pour la navigation<br />
<strong><strong>de</strong>s</strong> robots mobiles en environnements inconnus<br />
2006 HENDEL HADJEL K.<br />
GHAZLI RAHLA<br />
AUT: 38 I<strong>de</strong>ntification <strong>de</strong> processus par <strong><strong>de</strong>s</strong> techniques<br />
neuronales<br />
2006 A .FOITIH AKODAD NEZHA<br />
YAGOUBI S.<br />
AUT: 39 Intégration d’un système ESD avec un système <strong>de</strong><br />
détection feu et gaz<br />
2006 HAMID.A GHERIBI HAFID<br />
BRIKCI S.<br />
AUT: 40<br />
AUT: 45 I<strong>de</strong>ntification <strong>de</strong> défauts <strong>de</strong> barres rotoriques <strong>de</strong><br />
la machine asynchrone par la métho<strong>de</strong> (PRONY)<br />
2007 BOUDINAR SEBBEH KADER<br />
LARABI NABIL<br />
AUT: 46 Développement d’un programme en MATLAB<br />
<strong>de</strong> contrôle d’un robot a 5axes<br />
2007 BENGHANE<br />
M<br />
BOUHAIK A.<br />
BENSENOUCI M<br />
AUT: 47 Réalisation d’un système <strong>de</strong> contrôle d’un<br />
onduleur triphasé <strong><strong>de</strong>s</strong>tiné a la connexion <strong><strong>de</strong>s</strong><br />
2007 DELLA .K BAZEMLAL L.<br />
DIDI MOHAMED<br />
générateurs photovoltaïques<br />
AUT: 48 Etu<strong>de</strong> <strong>de</strong> rénovation d’un système <strong>de</strong> protection<br />
feu et gaz d’une station <strong>de</strong> compression<br />
2007 HAMID.A HARRAT A.<br />
BENSALEM M.<br />
AUT: 49 Contribution a la modélisation et la comman<strong>de</strong> 2007 OMARI<br />
d’un drone birotors<br />
AUT: 50 Réalisation d’un onduleur a trois niveaux 2007 BENDJABBA<br />
R<br />
BAHLOULI M.<br />
NAMIRI O.<br />
AUT: 51 Automatisation d’une station d’acquisition <strong><strong>de</strong>s</strong><br />
images satellitaire Météosat <strong>de</strong>uxième génération<br />
(MSG )<br />
2007 HASSINI DERRAR A.<br />
BRADA A.<br />
AUT: 52 L’intégration <strong>de</strong> système <strong>de</strong> délestage <strong>de</strong> réseau<br />
électrique du complexe GL2Z a base <strong>de</strong> relais<br />
électronique dans un API triconex V9<br />
2007 MECHE BOUCHENGA M.<br />
FEKIR M.
AUT: 53 Comman<strong>de</strong> neuronal inverse appliquée a la<br />
comman<strong>de</strong> d’un moteur à courant continue en<br />
temps réel<br />
2007 CHAOUCH ELAQRA H.<br />
BOUCHOUICHA<br />
AUT: 54 Exploitation d’une RFID par un PC 2007 YAHIAOUI.K KOUIDER AKIL<br />
OUAMRI WALID<br />
AUT: 55 Onduleur monophasé <strong><strong>de</strong>s</strong>tiné a un système<br />
photovoltaïque : Conception et calcul<br />
2007 KHIAT .Z OUZAL M.<br />
NAFI OMAR<br />
AUT: 56 Configuration <strong><strong>de</strong>s</strong> séquences <strong>de</strong> démarrages,<br />
arrêt et sécurité du <strong><strong>de</strong>s</strong>saleur 2010LF sur un<br />
automate programmable <strong>de</strong> type TRICONEX<br />
(V9)<br />
AUT: 57 Optimisation par essaim particulaire :<br />
application au déplacement d’un groupe <strong>de</strong><br />
robots<br />
AUT: 58 Amélioration <strong><strong>de</strong>s</strong> performances <strong>de</strong> la comman<strong>de</strong><br />
du moteur asynchrone par réseau <strong>de</strong> neurones<br />
AUT: 59 Optimisation d’un système d’interférence flou<br />
par Q_learning<br />
AUT: 60 Simulation <strong>de</strong> l’automatisation du contrôle <strong>de</strong> PH<br />
et la conductivité <strong>de</strong> l’eau <strong>de</strong> la chaudière<br />
complexe (GL1Z)<br />
AUT: 61 Contrôle et régulation <strong>de</strong> la fréquence dans les<br />
centrales <strong>de</strong> la production d’énergie électrique<br />
AUT: 62 Elaboration d’un environnement logiciel <strong>de</strong><br />
programmation GRAFCET pour un automate<br />
programmable a base <strong>de</strong> microcontrôleur<br />
18F452<br />
AUT: 63 Comman<strong>de</strong> <strong>de</strong> la vitesse d’un moteur a courant<br />
continu par la logique floue en utilisant le<br />
2007 ZELMAT ABDESSELEM F.<br />
BENZERFA F. Z.<br />
2007 KOUADRI BENABADJI I.<br />
RAMDANE A.<br />
2007 BEN DAHA MOHMMAD RADI<br />
2007 Mme<br />
HOUARI<br />
RAHALI W.<br />
MEKAKIA MAAZA<br />
F.Z.<br />
2007 RAHLI .M DAIKH M.<br />
MOSTEFAOUI O.<br />
2007 KOTNI .H LAKRMI HABIB<br />
LAKRMI L.<br />
2007 NOUIBAT .W ZAREB M. M.<br />
LARIBI M.R.<br />
2007 TAHRI .A
microcontrôleur MC9S12D64<br />
AUT: 64 Implémentation d’un système d’arrêt d’urgence<br />
au niveau du complexe GP2Z<br />
AUT: 65 Pilotage automatisé <strong><strong>de</strong>s</strong> instruments <strong>de</strong> mesure<br />
avec LABVIEW<br />
AUT: 66 Réalisation d’un système <strong>de</strong> spectroscopie<br />
d’impédance <strong><strong>de</strong>s</strong>tiné a l’étu<strong>de</strong> <strong><strong>de</strong>s</strong> batteries au<br />
plomb<br />
AUT: 67 Téléopération du bras manipulateur (moteur pas<br />
à pas ) par le web ( Matlab )<br />
AUT: 68 Remise en état <strong>de</strong> fonctionnement automatique<br />
du système <strong>de</strong> sécurité au niveau <strong>de</strong> la fosse <strong><strong>de</strong>s</strong><br />
pompes<br />
AUT: 69 Evitement d’obstacles dynamiques en robotique<br />
mobiles<br />
AUT: 70 La comman<strong>de</strong> d’un onduleur parallèle a<br />
résonance <strong><strong>de</strong>s</strong>tinée au chauffage par induction<br />
AUT: 71 Modélisation et simulation (Y-THOMPSON)<br />
contrôleur pour la capture d’un microsatellite a<br />
base altitu<strong>de</strong><br />
AUT: 72 Réalisation d’onduleur <strong>de</strong> <strong>de</strong>ux niveaux <strong><strong>de</strong>s</strong>tinés<br />
a la connexion <strong><strong>de</strong>s</strong> générateurs photovoltaïques<br />
au réseau électrique<br />
AUT: 73 La comman<strong>de</strong> optimale <strong><strong>de</strong>s</strong> MCC : Partie 1<br />
Etu<strong>de</strong> et conception <strong>de</strong> la carte <strong>de</strong> comman<strong>de</strong><br />
AUT: 74 Génération <strong><strong>de</strong>s</strong> impulsions <strong>de</strong> comman<strong>de</strong> d’un<br />
convertisseur matriciel<br />
AUT: 75 Application du filtre <strong>de</strong> KALMAN dans la<br />
poursuite d’une cible manoeuvrante<br />
2007 RAHLI .M KHEDIM A.<br />
BOULARZEK S.<br />
2007 NOUIOUA T BENDIFALLAH<br />
BAHRAOUI N.<br />
2007 LAKHDARI. MELAB MEHDI<br />
F<br />
BENAHMED Y.<br />
2007 AHMED<br />
FOITIH<br />
IBARI BENAOUMEUR<br />
ACID M.<br />
2007 NOUIOUA. T BOUKRA AEK<br />
BOUSSAID SAID<br />
2007 Mme<br />
HENDEL.F<br />
MEBARKI A.<br />
BOURIDENE I.<br />
2007 BOUADI DEFDAF SIHEM<br />
DJARI FARIDA<br />
2007 SI<br />
LECHEHEB A.<br />
MOHAMMED HALFAOUI B.<br />
.A<br />
2007 DELLA<br />
KRACHAI<br />
KEDDAR Med<br />
BELKHEDIM A.<br />
2007 A. MECHE DJOUB A. B.<br />
BELALEM A.<br />
2007 GHALEM ABID BRAHIM<br />
KICHOU M.<br />
2007 DAHMANI. M NAMOUS M.<br />
DAMECHE M.<br />
AUT: 76 Réalisation d’une carte <strong>de</strong> comman<strong>de</strong> d’un bras 2007 BENGHANE MANSOURI MED
<strong>de</strong> robot 5 axes M MAZIZ Med<br />
AUT: 77 Prédiction <strong><strong>de</strong>s</strong> concentrations <strong><strong>de</strong>s</strong> minéraux par<br />
la métho<strong>de</strong> <strong>de</strong> régression <strong><strong>de</strong>s</strong> moindres carrées<br />
partiel<br />
2007 HAMID.A MEKHAISSI A.<br />
BOUAZIZ K.<br />
AUT: 78 Etu<strong>de</strong> et réalisation d’un système <strong>de</strong><br />
vidéosurveillance a distance<br />
AUT: 79 La réalisation du bras manipulateur CHAZ ( 01)<br />
et sa téléopération via le réseau Internet<br />
AUT: 80 Contrôle <strong><strong>de</strong>s</strong> pompes d'eau d'alimentation<br />
chaudière par DCS.<br />
AUT: 81 Modélisation <strong>de</strong> la machine asynchrone en vue <strong>de</strong><br />
son diagnostic.<br />
AUT: 82 Estimateur <strong>de</strong> vitesse pour comman<strong>de</strong> d'un<br />
moteur asynchrone en temps réel.<br />
AUT: 83 Réalisation d'un robot mobile commandé par PC<br />
(Phase 1)<br />
2007 Mme<br />
BENMOUSSE<br />
T<br />
AMRIOUI SAMIR<br />
KHELOUI S.<br />
2008 Z. AHMED<br />
FOITIH<br />
ZEMALACHE H.<br />
BOURBAI A.<br />
2008 Mme DJOUADI SAMIR<br />
HOUARI ENNACEUR<br />
2008 BOUDINAR BEDRICI REDA<br />
BELLAHCENE Z.<br />
2008 BOURAHLA GUERD AMINE<br />
.M<br />
CHERRAKA Y.<br />
2008 YAHIAOUI HAMANE B.<br />
.K<br />
AZROUG Med<br />
AUT: 84 Etu<strong>de</strong> <strong>de</strong> l'automatisation <strong><strong>de</strong>s</strong> séquences <strong><strong>de</strong>s</strong><br />
sécheurs <strong>de</strong> GZS du complexe GL4Z<br />
2008 BENDJEBAR.<br />
M<br />
BOUDAHRI<br />
.F<br />
BOUDRAA A.<br />
SALAMA I.<br />
AUT: 85 Le contrôle d'une pompe dans un système<br />
photovoltaïque<br />
AUT: 86 Simulation et comman<strong>de</strong> d'un modèle non<br />
linéaire <strong>de</strong> la machine à réluctance variable.<br />
AUT: 87 Contrôle du mouvement d'un robot dans une<br />
manipulation hyper dynamique : robot <strong><strong>de</strong>s</strong>tiné au<br />
sport <strong>de</strong> golf .<br />
AUT: 88 Comman<strong>de</strong> distribuée <strong>de</strong> la chaudière D-316<br />
(100T/H) du complexe GNL1/Z.<br />
2008 DAOUD BENZINEB A.<br />
KEHAL M. R.<br />
2008 BENHADRIA BENMERZOUG S<br />
.R<br />
BEN BELKACEM<br />
2008 OMARI OSMANI BELABBES<br />
2008<br />
BOUHAMIDA<br />
BENMAZOUZ S.<br />
SOUID S.
AUT: 89 Conception et réalisation d'un régulateur<br />
numérique PID sur réseau MODBUS<br />
AUT: 90 Régulation <strong>de</strong> vitesse d'un moteur à courant<br />
continu par Microcontrôleur HCS12D512.<br />
2008 KHIAT Z. MIMOUNI K.<br />
BENGOUFA A.<br />
2008<br />
KADDOUR M. S.<br />
BOUCHETAT MORSLI A.<br />
A<br />
AUT :91 Automatisation d'une machine <strong>de</strong> traction 2008 NOUIOUA AIT ALI SAID D.<br />
MESNOUA A.<br />
AUT :92 Comman<strong>de</strong> numérique <strong>de</strong> vitesse <strong>de</strong> l'association<br />
hacheur moteur a courant continu<br />
2008 TAHRI .A YOUSFI M. Y.<br />
BOUANANI A. H.<br />
AUT :93 Réalisation d'un système DC-DC, DC-AC <strong><strong>de</strong>s</strong>tiné<br />
à une installation photovoltaïque.<br />
2008 LAKHDARI GHALEM B.<br />
ZEGAI M. A.<br />
AUT :94 La comman<strong>de</strong> SVM d'un onduleur triphasé étu<strong>de</strong><br />
et réalisation<br />
2008 DELLA<br />
KRACHAI<br />
REBOUIE B.<br />
NEDJAA B.<br />
AUT :95 Réalisation du système <strong>de</strong> comman<strong>de</strong> distribué à<br />
base <strong>de</strong> microcontrôleur.<br />
AUT :96 Réalisation d'une carte à base <strong>de</strong> microcontrôleur<br />
connectée au réseau ETHERNET<br />
AUT :97 Régulation par mo<strong>de</strong> glissant d'un moteur a<br />
synchrone<br />
AUT :98 La comman<strong>de</strong> gestuelle dynamique d'un robot<br />
virtuel<br />
2008 BOUTHIBA LAKJAA F.<br />
BEKHTAOUI R.<br />
2008 GHANEM .B CHERIF M. M.<br />
SAFRAOUI BOUROKBA N.<br />
.S<br />
2008 Mme TOUIA K.<br />
BENDAHA TOUBAL A.<br />
2008<br />
MACHOU F. Z.<br />
BERRACHED BOUDRA F. Z.<br />
AUT :99 Contrôle <strong>de</strong> température d'un processus par un<br />
microcontrôleur PIC16F877.<br />
2008 Mme<br />
DELLA<br />
BELHADRI K.<br />
HAMZAOUI A.<br />
AUT<br />
:100<br />
AUT<br />
:101<br />
Conception et réalisation d'une carte d'interface<br />
PC-API pour la comman<strong>de</strong> <strong>de</strong> parties opératives<br />
virtuelles.<br />
Amélioration <strong><strong>de</strong>s</strong> performances <strong>de</strong> comman<strong>de</strong><br />
d'un moteur asynchrone application <strong><strong>de</strong>s</strong><br />
2008 NOUIBAT<br />
.W<br />
SEDDIKI C.<br />
TAZEBINTE B.<br />
2008 BENDAHA BENCHOHRA A.<br />
BOUALEM M.
AUT<br />
:102<br />
AUT<br />
:103<br />
AUT<br />
:104<br />
AUT<br />
:105<br />
algorithmes génétiques<br />
Exploitation d'une carte DSP pour la comman<strong>de</strong> 2008 BENGHANE SEDDIK A. Y.<br />
d'un moteur à courant continu.<br />
M MEDJAOUI M. A.<br />
Contribution à la réalisation d'un banc d'essai 2008 BENNOUZA GAHLOUZ F.<br />
<strong><strong>de</strong>s</strong>tiné au diagnostic <strong><strong>de</strong>s</strong> défauts dans les<br />
BENADDA H.<br />
machines asynchrones à cage d’écureuil.<br />
Poursuite d'une cible mobile volante 2008 DAHMANI .M BELHABICH S.<br />
BOUKHENCHA Z<br />
Intégration <strong>de</strong> la comman<strong>de</strong> <strong><strong>de</strong>s</strong> filtres rotatifs 2008 MECHE .A AID RAMZA<br />
dans le système DCS du complexe GL1/Z<br />
BEKHEDDA H.<br />
AUT<br />
:106<br />
Comman<strong>de</strong> <strong>de</strong> trois moteurs par un<br />
microcontrôleur 8051<br />
2008 BENCHERIF<br />
.K<br />
BERRZIGA M.<br />
NEGMARI R.<br />
AUT<br />
:107<br />
Etu<strong>de</strong> et réalisation d'un automate<br />
programmable avec une liaison US<br />
2008<br />
NOUIBAT<br />
ROUISSAT. M<br />
FETAH .M<br />
AUT<br />
:108<br />
AUT<br />
:109<br />
AUT<br />
:110<br />
Réalisation et téléopération d'une base mobile via<br />
le réseau Internet<br />
2008 KADDOUR<br />
EL BOUDADI<br />
.L<br />
FRIH .A<br />
ZAOUI .A<br />
Contrôle robuste d'une colonne <strong>de</strong> distillation 2008 KOUADRI DERBALE .R<br />
MADJDOUB .M<br />
Analyse <strong>de</strong> la stabilité et la stabilisation <strong><strong>de</strong>s</strong> 2008 Mme BENMILOUD .F<br />
modèles flous<br />
HOUARI TAHIR. F<br />
AUT<br />
:111<br />
Régulation adaptative d'un moteur à courant<br />
continu<br />
2008 BENGHANE<br />
M<br />
DRAOU. M<br />
EZZINE. A<br />
AUT<br />
:112<br />
AUT<br />
:113<br />
Comman<strong>de</strong> d'une machine asynchrone à l'énergie<br />
éolienne<br />
Application <strong><strong>de</strong>s</strong> réseaux <strong>de</strong> neurones pour<br />
l'évitement d'obstacles dynamiques en robotique<br />
2008 ZAGOUG ZALEGH. M<br />
SEKKOUR. D<br />
2008 HENDEL .F BENABDELLAH<br />
BELLATRECHE
AUT:11<br />
4<br />
AUT:11<br />
5<br />
AUT:11<br />
6<br />
AUT:11<br />
9<br />
AUT:12<br />
0<br />
AUT:12<br />
1<br />
AUT:12<br />
2<br />
AUT:12<br />
3<br />
AUT:12<br />
4<br />
AUT:12<br />
5<br />
AUT:12<br />
6<br />
AUT:12<br />
7<br />
AUT:12<br />
8<br />
AUT:12<br />
9<br />
mobile<br />
Linéarisation par bouclage et comman<strong>de</strong><br />
2008 MOKHTARI BENOUSSAD.Z<br />
d’un MINI-QUADRATOR volant<br />
NAIMI .A<br />
Comman<strong>de</strong> d’un pont roulant 2008 ILES MEKSI A.<br />
DJABALLAH F.<br />
Conception et réalisation d’un logiciel <strong>de</strong><br />
simulation <strong>de</strong> partie opérative sur pc<br />
commandable à l’ai<strong>de</strong> d’un automate<br />
programmable via une carte interface USB<br />
2009 NOUIBAT W. KHOUSSA A.<br />
MAHARZI E.<br />
Automatisation d’un silo à céréales 2009 ILES LAMARI S.<br />
HAMDADA T.<br />
Programmation sur PLC <strong>de</strong> type triconex V9 2009 MECHE A. BELAIDOUNI<br />
d’un système <strong>de</strong> sécurité feu et gaz<br />
Comman<strong>de</strong> à base d’un microcontrôleur d’un 2009 BOUCHTATA TAHIDOUSTI Z.<br />
moteur à courant continu à aimants permanents<br />
N.<br />
SAYAH C.<br />
Comman<strong>de</strong> par retour d’état avec observateur 2009 CHENAFA M. CHAABANI B.<br />
d’un système multivariable<br />
HATTABI K.<br />
Etu<strong>de</strong> et réalisation d’une carte d’interface pour 2009 BENMOUSSA BESSELMA M.<br />
comman<strong>de</strong> vocale<br />
T N. BEKKOUCHE<br />
Conception et réalisation d’une carte<br />
2009 BENDJEBBA TABAS M.<br />
d’acquisition<br />
R<br />
BOUZIANE Y<br />
Automatisation <strong><strong>de</strong>s</strong> mesures d’échantillon à 2009 DELLA K. FELLAGUE B.<br />
partir d’un HPLC (chromatographe)<br />
HATTAB M.<br />
Réalisation d’une comman<strong>de</strong> numérique d’un 2009 BENHADRIA OUBAICHE K.<br />
hacheur série application : variateur <strong>de</strong> vitesse<br />
NEDJADI M.<br />
d’un moteur à courant continu<br />
Application <strong>de</strong> la technique du backstepping<br />
pour la comman<strong>de</strong> d’un drone<br />
Etu<strong>de</strong> sur la rénovation du système <strong>de</strong> comman<strong>de</strong><br />
du turbo générateur <strong>de</strong> type allison IM_600<br />
phase I<br />
2009 ZAMALACH<br />
E M.<br />
2009 BOUHAMIDA<br />
M.<br />
BOULILA K.<br />
BENHADJ A.<br />
BENKREIRA<br />
CHIKHAOUI
AUT:13<br />
0<br />
AUT:13<br />
1<br />
AUT:13<br />
2<br />
AUT:13<br />
3<br />
AUT:13<br />
4<br />
AUT:13<br />
5<br />
AUT:13<br />
6<br />
AUT:13<br />
7<br />
AUT:13<br />
8<br />
AUT:13<br />
9<br />
AUT:14<br />
0<br />
AUT:14<br />
1<br />
AUT:14<br />
2<br />
AUT:14<br />
3<br />
Mise en œuvre du logiciel LABVIEW :<br />
application à l’implémentation d’un PID<br />
Comman<strong>de</strong> linéarisante avec observateur <strong>de</strong><br />
position et <strong>de</strong> vitesse d’un robot manipulateur<br />
rapi<strong>de</strong><br />
Fiabilisation et amélioration du système <strong>de</strong><br />
comman<strong>de</strong> sécurité <strong><strong>de</strong>s</strong> trois turbocompresseurs<br />
Diagnostic <strong><strong>de</strong>s</strong> défauts <strong>de</strong> roulements d’un<br />
moteur asynchrone par la métho<strong>de</strong> (ESPRIT)<br />
Mise au point et programmation d’un automate<br />
programmable via la liaison USB en utilisant<br />
langage GRAFCET<br />
Conception d’un système <strong>de</strong> mesure et <strong>de</strong><br />
traitement <strong>de</strong> données par l’analyse <strong>de</strong> courant<br />
statorique dans la machine asynchrone<br />
I<strong>de</strong>ntification paramétrique d’un processus par<br />
moindres carrés<br />
Réalisation d’une machine CNC (computer<br />
numerical<br />
Comman<strong>de</strong> et contrôle <strong>de</strong> <strong>de</strong>ux systèmes distants<br />
via le web et réseau Modbus<br />
Estimation <strong>de</strong> vitesse pour la comman<strong>de</strong> d’un<br />
moteur asynchrone<br />
Développement d’une application industrielle<br />
sous STEP7 et Win CC<br />
Une interface E/S commandée par PC pour la<br />
comman<strong>de</strong> en position d’une camera <strong>de</strong><br />
surveillance<br />
Implémentation d’un ensemble <strong>de</strong> protocole <strong>de</strong> la<br />
pile TCP/IP sur une carte à base d’un micro<br />
contrôleur<br />
Amélioration du système anti-pompage du<br />
compresseur propane K01 sous DCS CS 3000<br />
2009 DELLA K. DJABRI A.<br />
2009 CHENAFA M. KASSAB A.<br />
ABOUALSEBAHM<br />
2009 RAHLI M. BLAL M.<br />
KARA L.<br />
2009 BOUDINAR BENNAIDJA A.<br />
YAHIAOUI<br />
2009 NOUIBAT HAMZA N.<br />
DEKOUKA Y.<br />
2009 DELLA K. BENMAAMAR<br />
BELOUASSAAM<br />
2009 KOUADRI B. BACHANI M.<br />
DRIF M.<br />
2009 DAHMANI KHALDIA A.<br />
ZELLAGUI A.<br />
2009 AHMED<br />
ABID A.<br />
FOITIH<br />
ADNANE<br />
2009 BOURAHLA MOUILAH A.<br />
M.<br />
TAHAR M.<br />
2009 AHMED HANIFA M.<br />
FOITIH MENAD M.<br />
2009 HENDEL F. MOHAMED R.<br />
BOUMAZA M.<br />
2009 MECH A. BOUHADEF L.<br />
MESSANIH M.<br />
2009 HAOUARI HOUAOUI A.<br />
HAMMOUCHE
AUT:14<br />
4<br />
AUT:14<br />
5<br />
AUT:14<br />
6<br />
AUT:14<br />
7<br />
AUT:14<br />
8<br />
AUT:14<br />
9<br />
AUT:15<br />
0<br />
Réalisation d’une carte <strong>de</strong> comman<strong>de</strong> d’un robot<br />
mobile<br />
2009 YAHIAOUI BOUATTAM B.<br />
ZAGHI S.<br />
Contrôle <strong>de</strong> position d’une antenne d’émission 2009 GHAOUTI OUGAD S.<br />
radioélectrique<br />
OUZANI M.<br />
Comman<strong>de</strong> sans capteur <strong>de</strong> vitesse par DTC 2009 BENDAHA Y. BELMHEL A.<br />
d’une machine asynchrone<br />
SLIMANI A.<br />
Comman<strong>de</strong> par mo<strong>de</strong> glissant d’un système sous 2009 ZAMALACH KARIM M.<br />
actionné –application à un hélicoptère à quatre<br />
E BOUNACEUR K.<br />
gèlices<br />
Contribution à la comman<strong>de</strong> d’une machine 2009 BENDAHA Y. BOUZIANE I.<br />
asynchrone à double alimentation (MADA)<br />
SAKET S.<br />
Comman<strong>de</strong> d’un procédé par retour d’état 2009 SOUSSI BESBES I.<br />
ZAIR SARAH<br />
Réalisation d’une comman<strong>de</strong> <strong>de</strong> vitesse d’un 2009 BENGHANE LAIDANI A.<br />
moteur à courant continu sans capteur<br />
M<br />
NABI W.














