

Physique _ formulaire optique 2.pdf - Coaching - EPFL
Physique _ formulaire optique 2.pdf - Coaching - EPFL
Physique _ formulaire optique 2.pdf - Coaching - EPFL

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Physique</strong> IV, Professeurs Laszlo Forro et Theo Lasser<br />
LABORATOIRE D’OPTIQUE BIOMEDICALE<br />
<strong>EPFL</strong> STI IOA LOB Téléphone: +41 21 693 57 26<br />
BM 5.143, Station 17 E-mail: Theo.Lasser@epfl.ch<br />
CH-1015 Lausanne Site web http://lob.epfl.ch<br />
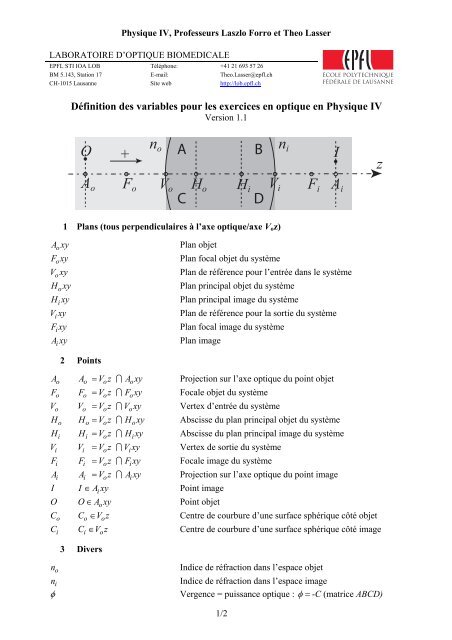
Définition des variables pour les exercices en <strong>optique</strong> en <strong>Physique</strong> IV<br />
Version 1.1<br />
O<br />
n o n<br />
+ A B i<br />
I<br />
z<br />
A o F o V o H o H i<br />
V i F i A i<br />
C D<br />
1 Plans (tous perpendiculaires à l’axe <strong>optique</strong>/axe V o z)<br />
Axy o<br />
Fxy<br />
o<br />
Vxy<br />
o<br />
H xy<br />
o<br />
Hxy<br />
i<br />
i<br />
Vxy<br />
Fxy<br />
i<br />
Axy<br />
i<br />
Plan objet<br />
Plan focal objet du système<br />
Plan de référence pour l’entrée dans le système<br />
Plan principal objet du système<br />
Plan principal image du système<br />
Plan de référence pour la sortie du système<br />
Plan focal image du système<br />
Plan image<br />
A o<br />
F<br />
V<br />
o<br />
o<br />
H<br />
H<br />
V i<br />
F<br />
i<br />
A<br />
I<br />
O<br />
i<br />
o<br />
i<br />
2 Points<br />
A o<br />
F<br />
V<br />
o<br />
o<br />
H<br />
H<br />
V i<br />
F<br />
i<br />
A<br />
i<br />
o<br />
i<br />
= Vz o ∩ Axy o<br />
= Vz o ∩ Fxy o<br />
= Vz o ∩ Vxy o<br />
= Vz o ∩ H o xy<br />
= Vz o ∩ Hxy i<br />
= Vz o ∩ Vxy i<br />
= Vz o ∩ Fxy i<br />
= Vz o ∩ Axy i<br />
Axy<br />
i<br />
Projection sur l’axe <strong>optique</strong> du point objet<br />
Focale objet du système<br />
I ∈ Point image<br />
O∈ A xy<br />
Point objet<br />
o<br />
C o Co o<br />
C i Ci o<br />
3 Divers<br />
Vertex d’entrée du système<br />
Abscisse du plan principal objet du système<br />
Abscisse du plan principal image du système<br />
Vertex de sortie du système<br />
Focale image du système<br />
Projection sur l’axe <strong>optique</strong> du point image<br />
∈ V z<br />
Centre de courbure d’une surface sphérique côté objet<br />
∈ V z<br />
Centre de courbure d’une surface sphérique côté image<br />
n o<br />
n i<br />
φ<br />
Indice de réfraction dans l’espace objet<br />
Indice de réfraction dans l’espace image<br />
Vergence = puissance <strong>optique</strong> : φ = -C (matrice ABCD)<br />
1/2
4 Distances (nombres scalaires + ou -) avec signes<br />
d o do HoAo<br />
d i di HiAi<br />
V<br />
d o<br />
V<br />
do VoAo<br />
V<br />
d i<br />
= Distance objet : d < 0 si objet réel, devant le système<br />
= Distance image : d > 0 si image réelle derrière le système<br />
= Distance entre le plan objet et le vertex d’entrée du système<br />
(= distance objet pour lentille mince)<br />
d < 0 si objet réel devant le système<br />
V<br />
i ViAi<br />
V<br />
o<br />
d = Distance entre le vertex de sortie du système et le plan<br />
image (= distance image pour la lentille mince)<br />
V<br />
d i > 0 si image réelle derrière le système<br />
V<br />
1−<br />
D<br />
∆ do = VoHo<br />
= -no<br />
= fo<br />
( D− 1)<br />
Distance entre le vertex d’entrée du système et le plan<br />
C<br />
V<br />
principal côté objet : si ∆ d o<br />
> 0 Ho<br />
xy derrière Vxy o<br />
V 1−<br />
A<br />
∆ di = VH<br />
i i<br />
= ni = fi( A− 1)<br />
C<br />
Distance entre le plan principal côté image et le vertex de<br />
V<br />
sortie du système : si ∆ d i < 0 Hxy i devantVxy<br />
i<br />
n n<br />
= =− = Longueur focale objet : f o 0 pour système convergent<br />
φ C<br />
o o<br />
f o fo HoFo<br />
i i<br />
f i fi i i<br />
R o Ro VC o o<br />
R<br />
R i i i i<br />
ε<br />
τ o<br />
τ i<br />
o<br />
i<br />
= Rayon de courbure d’une surface sphérique côté objet<br />
= VC<br />
Rayon de courbure d’une surface sphérique côté image<br />
ε = VV o i<br />
Epaisseur d’une lentille<br />
do<br />
τ o =<br />
no<br />
Distance <strong>optique</strong> pour la distance objet<br />
di<br />
τ i =<br />
n<br />
Distance <strong>optique</strong> pour la distance image<br />
i<br />
Le sens positif est donné par le sens de propagation de la lumière (typiquement de la gauche vers la droite). On<br />
choisit une origine, sert de point de référence, sur l’axe (p.ex le vertex d’entrée du système) Pour la translation<br />
objet-système on se déplace toujours dans le sens inverse du sens donné par la distance scalaire d o . Pour la<br />
translation système-image on se déplace toujours dans le même sens que celui indiqué par la distance scalaire d i .<br />
5 Matrices/systèmes<br />
C<br />
R<br />
R <br />
T<br />
L<br />
L m<br />
S<br />
M<br />
Matrice de conjugaison (formation d’image)<br />
Matrice de réfraction<br />
Matrice de réflexion<br />
Matrice de translation<br />
Matrice de transfert pour une lentille<br />
Matrice de transfert pour une lentille mince<br />
Matrice pour un système<br />
Matrice quelconque<br />
2/2














