Pioneer AVIC-X3 - User manual - suédois
Pioneer AVIC-X3 - User manual - suédois
Pioneer AVIC-X3 - User manual - suédois

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
MAN-<strong>AVIC</strong>-<strong>X3</strong>-SW.book Page 127 Monday, July 2, 2007 4:30 PM<br />
• Du kan endast visa en karta med större skala.<br />
Kartdisplayen ändras automatiskt till en skala<br />
på 50 km (eller 100 km).<br />
• Kartmatchningsfunktionen är inte tillgänglig.<br />
Positionsbestämningen av fordonet kan därför<br />
vara missvisande.<br />
• Navigationsvägledningen blir endast<br />
tillgänglig när du anländer till ditt färdmål.<br />
Annan typ av vägledning är ej tillgänglig (inga<br />
färdriktningspilar visas heller).<br />
Om du vill slippa dessa begränsningar måste du<br />
sätta in DVD-kartskivan i navigationssystemet.<br />
Positionsbestämningsteknik<br />
Navigationssystemet kalkylerar noggrant din<br />
nuvarande position genom att kombinera<br />
positionsbestämning med GPS och<br />
Instrumentnavigering.<br />
Positionsbestämning med GPS<br />
Det globala positionsbestämningssystemet<br />
(GPS) baseras på ett nätverk av satelliter som<br />
kretsar runt jorden. Var och en av dessa satelliter,<br />
som kretsar på en höjd av 21 000 km, sänder ut<br />
kontinuerliga radiosignaler med tid- och<br />
positionsinformation. Detta säkrar att signaler<br />
från minst tre satelliter kan tas emot på vilken<br />
som helst öppen plats på jordens yta.<br />
GPS-informationens noggrannhet beror på<br />
mottagningens kvalitet. När signalerna är<br />
kraftiga och mottagningen är god, kan GPS<br />
bestämma breddgrad, längdgrad och höjd för<br />
noggrann tredimensionell positionsbestämning.<br />
Men om signalkvalitén är svag, kan endast två<br />
dimensioner, längdgrad och breddgrad erhållas<br />
och positionsbestämningsfelen är något större.<br />
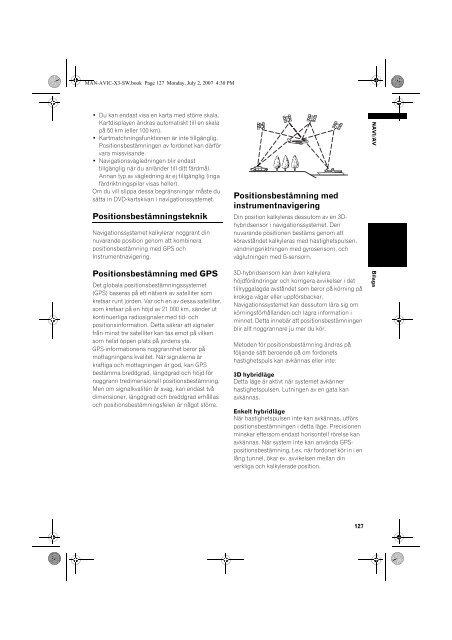
Positionsbestämning med<br />
instrumentnavigering<br />
Din position kalkyleras dessutom av en 3Dhybridsensor<br />
i navigationssystemet. Den<br />
nuvarande positionen bestäms genom att<br />
köravståndet kalkyleras med hastighetspulsen,<br />
vändningsriktningen med gyrosensorn, och<br />
väglutningen med G-sensorn.<br />
3D-hybridsensorn kan även kalkylera<br />
höjdförändringar och korrigera avvikelser i det<br />
tillryggalagda avståndet som beror på körning på<br />
krokiga vägar eller uppförsbackar.<br />
Navigationssystemet kan dessutom lära sig om<br />
körningsförhållanden och lagra information i<br />
minnet. Detta innebär att positionsbestämningen<br />
blir allt noggrannare ju mer du kör.<br />
Metoden för positionsbestämning ändras på<br />
följande sätt beroende på om fordonets<br />
hastighetspuls kan avkännas eller inte:<br />
3D hybridläge<br />
Detta läge är aktivt när systemet avkänner<br />
hastighetspulsen. Lutningen av en gata kan<br />
avkännas.<br />
Enkelt hybridläge<br />
När hastighetspulsen inte kan avkännas, utförs<br />
positionsbestämningen i detta läge. Precisionen<br />
minskar eftersom endast horisontell rörelse kan<br />
avkännas. När system inte kan använda GPSpositionsbestämning,<br />
t.ex. när fordonet kör in i en<br />
lång tunnel, ökar ev. avvikelsen mellan din<br />
verkliga och kalkylerade position.<br />
NAVI/AV<br />
Bilaga<br />
127