KRITÉRIUM FELADATHOZ - Mindenkilapja
KRITÉRIUM FELADATHOZ - Mindenkilapja
KRITÉRIUM FELADATHOZ - Mindenkilapja

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
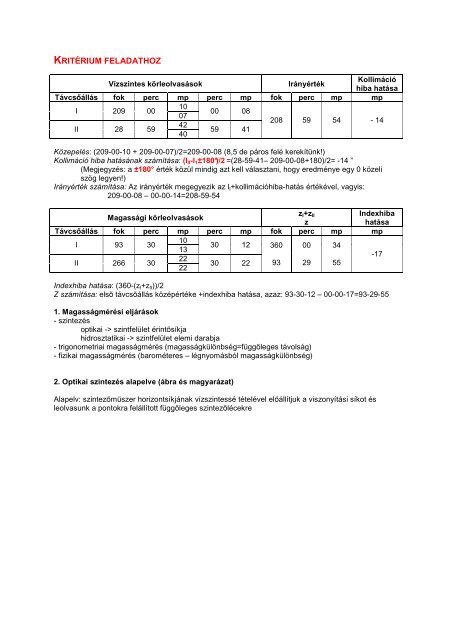
<strong>KRITÉRIUM</strong> <strong>FELADATHOZ</strong><br />
Vízszintes körleolvasások Irányérték<br />
Kollimáció<br />
hiba hatása<br />
Távcsőállás fok perc mp perc mp fok perc mp mp<br />
I<br />
II<br />
209<br />
28<br />
00<br />
59<br />
10<br />
07<br />
42<br />
40<br />
00<br />
59<br />
08<br />
41<br />
208 59 54 - 14<br />
Közepelés: (209-00-10 + 209-00-07)/2=209-00-08 (8,5 de páros felé kerekítünk!)<br />
Kollimáció hiba hatásának számítása: (lII-l1±180°)/2 =(28-59-41– 209-00-08+180)/2= -14 ”<br />
(Megjegyzés: a ±180° érték közül mindig azt kell választani, hogy eredménye egy 0 közeli<br />
szög legyen!)<br />
Irányérték számítása: Az irányérték megegyezik az lI+kollimációhiba-hatás értékével, vagyis:<br />
209-00-08 – 00-00-14=208-59-54<br />
Magassági körleolvasások<br />
zI+zII<br />
z<br />
Indexhiba<br />
hatása<br />
Távcsőállás fok perc mp perc mp fok perc mp mp<br />
I<br />
II<br />
93<br />
266<br />
30<br />
30<br />
10<br />
13<br />
22<br />
22<br />
30<br />
30<br />
12<br />
22<br />
360<br />
93<br />
00<br />
29<br />
34<br />
55<br />
-17<br />
Indexhiba hatása: (360-(zI+zII))/2<br />
Z számítása: első távcsőállás középértéke +indexhiba hatása, azaz: 93-30-12 – 00-00-17=93-29-55<br />
1. Magasságmérési eljárások<br />
- szintezés<br />
optikai -> szintfelület érintősíkja<br />
hidrosztatikai -> szintfelület elemi darabja<br />
- trigonometriai magasságmérés (magasságkülönbség=függőleges távolság)<br />
- fizikai magasságmérés (barométeres – légnyomásból magasságkülönbség)<br />
2. Optikai szintezés alapelve (ábra és magyarázat)<br />
Alapelv: szintezőműszer horizontsíkjának vízszintessé tételével előállítjuk a viszonyítási síkot és<br />
leolvasunk a pontokra felállított függőleges szintezőlécekre
lP - lécleolvasás P pontra<br />
lQ - lécleolvasás Q pontra<br />
∆P, ∆Q – szintfelület görbültségi hiba<br />
MP – P pont tengerszint feletti magassága<br />
MQ – Q pont tengerszint feletti magassága<br />
Q<br />
∆mP =MQ-MP=lP-lQ=[(lQ)+∆Q] -[(lP)+ ∆P]= (lQ)- (lP)+(∆Q-∆P)<br />
∆Q-∆P = 0 azonos műszer-léc távolság esetében!<br />
3. Libellás szintezőműszer felépítése (ábra és magyarázat)<br />
4. Szintezés műszer okozta hibák és csökkentésük<br />
Hiba Csökkentés módja<br />
Irányvonal-ferdeség<br />
egyenlő műszer-léc távolság<br />
hőhatás elleni védelem<br />
Horizontferdeség (csak a minden magasságkülönbséget 2-szer<br />
kompenzátoros műszernél!) mérünk és közepelünk<br />
Fekvőtengely külpontossága állótengely gondos függőlegessé tétele
5. Szintezés léc okozta hibák és csökkentésük<br />
Hiba Csökkentés módja<br />
Talpponti hiba<br />
Egy léc alkalmazásával kiesik<br />
2 léc esetében páros műszerállás<br />
Lécosztás-hiba komparálás<br />
Lécferdeség<br />
Léchez tartozó szelencés libella<br />
igazítottsága és gondos függőlegessé tétel<br />
6. Szintezés külső körülmények okozta hibák és csökkentésük<br />
Hiba Csökkentés módja<br />
Műszersüllyedés<br />
Szimmetrikus program (HEEH mérés, azaz hátraelőre-előre-hátra<br />
ugyanazon műszerállásból)<br />
Lécsüllyedés<br />
Oda-vissza szintezés<br />
megfelelő kötőpontok választása<br />
Mérési utasítás (bizonyos napszakokban nem<br />
Refrakció<br />
szintezünk, meghatározott legkisebb leolvasás<br />
értéke)<br />
7. Szintezési hibák melyek kiküszöbölhetők egyenlő műszer-léc távolsággal<br />
Irányvonal-ferdeség<br />
Szintfelület görbültség<br />
8. Forgási ellipszoid (alapfelület) helyettesítése<br />
gömb – ha a munkaterület 4
11. Teodolit szerkezete
12. Beosztásos mikroszkóp<br />
13. Index nélküli koincidenciás mikroszkóp<br />
Főleolvasás fok és perc érték: A fok értéket a látómező bal oldalán még látható szám adja.<br />
A főleolvasás előállításához a látómező bal oldali szélén található és egyenes állású számmal (az<br />
ábrán 11) jelölt osztásvonástól megszámoljuk az osztásközöket a 180º-kal eltérő és fordított állású<br />
számmal (az ábrán 191) jelölt osztásvonásig. Az index – ha lenne – felezné a két beosztásvonás<br />
távolságát. Ezt a fél távolságot úgy is megkaphatjuk, ha az osztásközök számát (az ábrán öt) a 20´-es<br />
beosztásköz fél értékével, 10´-cel szorozzuk. Az ábrán tehát a főleolvasás 11º50´, a csonkaleolvasás<br />
tizedbecsléssel 8´52,5˝, a teljes leolvasás tehát 11º58´52,5˝.<br />
14. Csöves libella fontos pontjai<br />
O: beosztás alaki középpontja<br />
N: normálpont (libellakörív érintője párhuzamos a fekvőtengellyel<br />
C: buborék középpontja<br />
Egybeesések:<br />
Ha N≡C akkor az állótengely függőleges vagy a fekvőtengely vízszintes<br />
Ha N≡O akkor a libella a tengelyhez igazított<br />
Ha C≡O akkor a megfelelő tengely függőleges/vízszintes
15. Teodolit műszerhibák és csökkentésük<br />
Műszerhibák = kényszerektől való eltérések!!<br />
Kényszer Eltérés Hiba neve Csökkentés<br />
Irányvonal merőleges a<br />
fekvőtengelyre<br />
A két tengely metsződik, de nem<br />
90 fokban<br />
kollimációhiba<br />
Állótengely merőleges A két tengely metsződik, de nem Fekvőtengely<br />
a fekvőtengelyre 90 fokban<br />
merőlegességi hiba<br />
Irányvonal és<br />
állótengely nem<br />
metsző egyenesek<br />
Kitérő egyenesek<br />
Horizontális<br />
távcsőkülpontosság<br />
2 távcsőállásban való<br />
mérés<br />
Irányvonal és<br />
fekvőtengely nem<br />
metsző egyenesek<br />
Kitérő egyenesek<br />
Vertikális<br />
távcsőkülpontosság<br />
Az irányszálak<br />
Mindig a szálkereszt<br />
(szálkereszt)<br />
Nem 90 fokos szöget zárnak be Szálferdeség<br />
középpontjával<br />
merőlegesek egymásra<br />
Vízszintes távcsőállás<br />
irányzunk<br />
mellett a magassági<br />
körleolvasásnak 0 vagy<br />
90 foknak kell lennie<br />
Eltérés van Indexhiba<br />
Limbuszkör síkja<br />
merőleges az<br />
állótengelyre<br />
Az állótengely a<br />
Az állótengely átmegy a limbusz<br />
geometriai középpontján de a<br />
bezárt szög nem 90 fok<br />
Limbuszkör<br />
merőlegességi hiba<br />
2 távcsőállásban való<br />
mérés<br />
limbuszkör<br />
középpontján megy át<br />
(döféspont)<br />
Máshol van a síkon a döféspont<br />
Limbuszkör<br />
külpontossági hiba<br />
A limbuszkör osztása<br />
megfelelő<br />
Nem minden osztás egyforma<br />
Limbuszkör<br />
beosztásának hibája<br />
Több fordulóban való<br />
mérés<br />
Magassági kör síkja<br />
merőleges a<br />
fekvőtengelyre<br />
A fekvőtengely a<br />
a bezárt szög nem 90 fok<br />
Magassági kör<br />
merőlegességi hiba<br />
-<br />
magassági ör<br />
középpontján megy át<br />
(döféspont)<br />
Máshol van a síkon a döféspont<br />
Magassági kör<br />
külpontossági hiba<br />
-<br />
A magassági kör<br />
osztása megfelelő<br />
Nem minden osztás egyforma<br />
Magassági kör<br />
beosztásának hibája<br />
-
I – irányvonal<br />
V – állótengely<br />
H – fekvőtengely<br />
Kiküszöbölés: a 7. és 9. kivételével a 2 távcsőállásban való mérés<br />
16. Teodolit felállítási hibái és külső körülmények okozta hibák<br />
Pontraállási hiba Gondosan végezzük a pontraállást<br />
Állótengely-ferdeségi hiba Minden forduló előtt gondos<br />
függőlegessé tétel<br />
Állványelcsavarodás Horizontzárás és a hiba elosztása,<br />
fordított irányú visszamérés<br />
Refrakció (oldal, magassági) Nagy, felmelegedett felület kerülése<br />
irányzáskor<br />
16. Májay Péter módszere<br />
Hibátlan mérés esetében:<br />
lII-lI=180º és zII+zI=360º<br />
Az ezektől való eltérés az előjelhelyes hibahatás.<br />
Lépések:<br />
- közel vízszintes irányvonal mellett végtelen távoli pontot irányzunk, I-II. távcsőállásban<br />
vízszintes és magassági szögeket olvasunk le.<br />
Fellépő hibák: vízszintes mérés – kollimációhiba<br />
magassági mérés – indexhiba<br />
Ismert módon ezek számíthatók.<br />
- közel vízszintes irányvonal mellett nagyon közeli pontot (távcső közelpontja) irányzunk, I-II.<br />
távcsőállásban vízszintes és magassági szögeket olvasunk le és ismerjük a mért pont és az<br />
álláspont távolságát.
Fellépő hibák: vízszintes mérés – kollimációhiba (ismert 1. lépésből)<br />
Horizontális távcsőkülpontosság<br />
magassági mérés – indexhiba (ismert 1. lépésből)<br />
vertikális távcsőkülpontosság<br />
Ismert módon a távcsőkülpontossági hibák számíthatók.<br />
- Meredek (α=30 fok) irányvonal mellett (függőlegesen azonos síkban) irányozzuk meg a 2.<br />
lépésben mért közeli pontot (távcső közelpontja) és I-II. távcsőállásban vízszintes és<br />
magassági szögeket olvasunk le. A fekvőtengelytől való távolságot mérni kell.<br />
Fellépő hibák: vízszintes mérés – kollimációhiba (ismert 1. lépésből)<br />
Horizontális távcsőkülpontosság (ismert 2.<br />
lépésből)<br />
FEKVŐTENGELY MERŐLEGESSÉGI HIBA<br />
(SZÁMÍTHATÓ)<br />
magassági mérés – indexhiba (ismert 1. lépésből)<br />
vertikális távcsőkülpontosság (ismert 2.<br />
lépésből)<br />
A vízszintes mérésből a fekvőtengely merőlegességi hiba számítható, a magassági mérés<br />
ellenőrzésre szolgál.<br />
18. Kollimációhiba hatása<br />
19. Fekvőtengely merőlegességi hiba hatása<br />
20. Külpontos iránymérés<br />
Alapelv: olyan álláspontról (központ) kellene végrehajtani iránymérést (tájékozást), amely nem<br />
alkalmas műszerállásra (pl. tripód). Ebben az esetben a mérést egy külső pontról végezzük – melynek<br />
a távolsága néhány méter a központtól – és az iránysorozatot központosítjuk, vagyis kiszámítjuk,<br />
mennyit mértünk volna akkor, ha a központon végeztük volna el a mérést.
A és P pont koordinátái ismertek, A’ pont ismeretlen<br />
d – külpontosság mértéke (központ-külpont távolsága), terepen mérni kell!<br />
t – központ és tájékozó irány távolsága, II. geodéziai alapfeladatból számítható<br />
l – irányérték<br />
ε – központosítási javítás<br />
A’P szakasszal párhuzamost húzunk az A ponton keresztül (szaggatott vonal)<br />
21. Trigonometriai szintezés alkalmazása trigonometriai magasságmérés helyett<br />
– 2 pont nem látszik össze<br />
– A teodolit egyik ponton sem állítható fel<br />
22. Trigonometriai magasságmérés alapképlete<br />
MA – A pont tengerszint feletti magassága (ismert)<br />
MP – P pont tengerszint feletti magassága (ezt keressük)<br />
H – jelmagasság (mérjük)<br />
h – műszermagasság (mérjük)<br />
α – magassági szög (mérjük)<br />
tf – ferde távolság (mérjük)<br />
tv – vízszintes távolság (számítjuk)<br />
∆m – pontok magasságkülönbsége<br />
MP= MA+h+tF*sin α-H= MA+h+tV*tg α-H<br />
Légköri sugárgörbület (refrakció) hatását figyelembe véve a teljes alapképlet:
M<br />
P<br />
2<br />
tv<br />
= M A + h − H + tv<br />
⋅tgα<br />
+ ( 1−<br />
k)<br />
= M<br />
2R<br />
23. Trigonometriai magasságmérés előnye és hátránya<br />
A<br />
+ h − H + t<br />
v<br />
2<br />
tv<br />
⋅ ctg z + ( 1−<br />
k)<br />
2R<br />
Előnyök: - rövid távon (max. 400 m) nagy magasságkülönbség meghatározására alkalmas<br />
- egymástól távoli pontok magasságkülönbsége meghatározható egy mérésből<br />
- alkalmazható nem megközelíthető pontok esetében is<br />
Hátrányok: - pontatlanabb, mint a szintezés (szintezés mm, trigmag cm!!)<br />
- ismerni kell a távolságokat<br />
24. Földgörbület és refrakció hatásának számítása<br />
d – távolság<br />
R – közepes földsugár<br />
k – állandó<br />
(Mivel a k és az R értéke állandó, ezért az (1-k)/2R értéke is állandó. A mértékegységeket egyeztetni<br />
kell: amennyiben az R km egységben van, akkor minden km egységben helyettesítendő a képletben!)<br />
25. Távolságredukciók feladat<br />
Lépések:<br />
ferde távolság vízszintes távolság alapfelületi távolság ( vetületi távolság)<br />
tf=ferde távolság<br />
tv=vízszintes távolság<br />
∆m – magasságkülönbség<br />
∆g – alapfelületi redukció<br />
H – a munkaterület közepes tengerszint feletti magassága (ismert pontok magasságának számtani<br />
átlagaként számítandó)<br />
R – közepes földsugár (6378 km)
26. Hőmérsékleti javítás feladat<br />
tm – méréskori hőmérséklet<br />
tk – komparálási hőmérséklet<br />
α – hőtágulási együttható<br />
l – mérőszalag hossza<br />
27. Fázisméréses távmérés alapképlete és magyarázat<br />
Alapelv – elektromágneses hullám (szinuszos mérőjel)<br />
N – egész hullámok száma<br />
λ – hullámhossz<br />
D – távolság<br />
D’ – maradéktávolság<br />
∆φ – fáziskülönbség<br />
28. Mérnöki automatizált távmérők jellemzői<br />
– hatótávolság: 1-5 km<br />
– távolságfüggetlen 2-3 mm alaphiba, amely km-enként 2-5 mm-el nő<br />
– kis tömeg, méretek és fogyasztás<br />
– teodolitra rögzíthető<br />
– eredményeket rögzíti<br />
– kijelzi a vízszintes távolságot<br />
– mp nagyságrendű távmérés
29. Meteorológiai javítás szorzótényezőjének számítása<br />
∆met=1+[(tVAN-tKELL)+0,4*(pKELL-pVAN)]*10 -6<br />
tVAN=+10 fok<br />
tKELL= 0 fok<br />
pVAN=+25 Hgmm<br />
pKELL= 0 Hgmm<br />
30. Magyarországon használt vetületek<br />
CSAK HAZÁNKBAN<br />
- sztereografikus vetület (síkvetület)<br />
- hengervetületek (HÉR, HKR, HDR) (érintő hengervetületek-kettős vetítés)<br />
- Egységes Országos Vetület (EOV) (redukált (süllyesztett) metsző henger – kettős vetítés)<br />
NEMZETKÖZI VETÜLET<br />
- Gauss-Krüger vetület (érintő henger)<br />
- UTM (Universal Transverse Mercator) vetület (metsző henger)<br />
31. EOV jellemzői<br />
- egyetlen vetületi rendszerben ábrázolható a teljes ország<br />
- tájolása ÉK<br />
- vízszintes tengely y, függőleges tengely (É-i irány) x<br />
- képzetes vetület (magyarázata: csak egyenletekkel írható le az átszámítás, geometriailag<br />
nem ábrázolható)<br />
- süllyesztett (metsző, redukált) hengervetület<br />
- szögtartó<br />
- alapfelülete az IUGG-67 ellipszoid, képfelülete hengerpalást<br />
- az alapfelületről a pontokat először az un. Gauss-gömbre, majd a képfelületre számítják át<br />
(kettős vetítés)<br />
32. EOV (Egységes Országos Vetület) áthelyezése<br />
Hová: vetületi kezdőponttól D-Ny-ra<br />
Mennyivel: Ny-ra 650 km, D-re 200 km<br />
Miért: egyrészt így minden pont koordinátája pozitív, másrészt az Y koordináta mindig nagyobb mint<br />
400000, az X pedig mindig kisebb, mint 400000, így kisebb az esély arra, hogy a 2 koordinátát<br />
felcseréljék<br />
33. Klasszikus geodéziai alaphálózatok<br />
– hierarchia<br />
– 2D+1D (azaz külön vizszintes és magassági alaphálózat)<br />
34. EOVA és EOMA<br />
EOVA – Egységes Országos Vízszintes Alapponthálózat<br />
Felsőrendű hálózat (I., II. és III. rendű pontok és IV. rendű főpontok)<br />
Alsórendű hálózat (V. rendű és felmérési alappontok)<br />
EOMA – Egységes Országos Magassági Alapponthálózat<br />
I.-III. rendű felsőrendű magassági alappontok<br />
+ kéregmozgási hálózat (nulladrendű)<br />
35. Pontleírás tartalma<br />
– pont száma<br />
– helyszínrajzi vázlat és leírás<br />
– Y,X,M koordináta<br />
– Állandósítás módja, éve, állandósítást végző neve<br />
– Vetületi rendszer<br />
– Magassági alapszint<br />
– Ellenőrzés éve, ellenőrzést végző neve
Minta:<br />
36. Vetületi alapfogalmak<br />
Vetületi síkkoordináta<br />
rendszer<br />
Irányszög<br />
– Kezdőpont: adott vetület kezdőpontja<br />
– x-tengely: vetületi kezdőmeridián egyenes képe<br />
– y-tengely: x-hez képest +90 fok óramutató járásával<br />
egyezően<br />
egy i irány δi irányszöge az a szög, amelyet egy kiválasztott<br />
kezdőirány súrol, miközben azt az óramutató járásával<br />
egyezően az adott irányba forgatjuk<br />
Ellentett irány δAB irányra δBA= δAB±180º<br />
Irányszög átvitel<br />
amikor egy irányszöghöz egy szöget hozzáadunk vagy kivonunk<br />
akkor is irányszöget kapunk (pl. belsőszöges előmetszés<br />
esetében)<br />
IRÁNYSZÖGHÖZ ÉS ELLENTETT IRÁNYHOZ ÁBRÁT IS KÉREK!<br />
37. I. geodéziai alapfeladat (poláris pont számítás)<br />
Ismert: A(YA,XA), δAB, tAB<br />
Számítandó: B(YB,XB)
ΔY<br />
= t<br />
ΔX<br />
= t<br />
Y<br />
B<br />
X<br />
B<br />
= Y<br />
AB<br />
A<br />
AB<br />
= X<br />
A<br />
⋅ sinδ<br />
⋅ cosδ<br />
AB<br />
AB<br />
+ ΔY<br />
= Y<br />
A<br />
+ t<br />
+ ΔX<br />
= X<br />
A<br />
AB<br />
+ t<br />
⋅sin<br />
δ<br />
38. II. geodéziai alapfeladat (irányszög-távolság számítás)<br />
Ismert: A(YA,XA), B(YB,XB)<br />
Számítandó: δAB, tAB<br />
ΔY<br />
= Y<br />
ΔX<br />
= X<br />
δ<br />
t<br />
AB<br />
AB<br />
B<br />
− Y<br />
B<br />
A<br />
− X<br />
ΔY<br />
= arctan<br />
ΔX<br />
=<br />
( ΔY<br />
)<br />
2<br />
A<br />
AB<br />
+ ( ΔX<br />
)<br />
AB<br />
⋅ cosδ<br />
A δAB számításánál figyelembe kell venni a koordinátakülönbségek előjeleit is!! (lsd. 39. pont)<br />
39. Irányszögek szögnegyed alapján<br />
2<br />
AB
40. Belsőszöges előmetszés<br />
Ismert: A(YA,XA), B(YB,XB) valamint mérésből (kizárólag) az α, β szögek<br />
Számítandó: P(YP,XP) módszer: szinusz-tétel<br />
A pontról B pontról<br />
δAP= δAB+ α δBP= δBA – β= (δAB±180) – β<br />
sin β t<br />
=<br />
sin γ t<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
A<br />
= X<br />
A<br />
AP<br />
AB<br />
+ t<br />
AP<br />
+ t<br />
→ t<br />
AP<br />
AP<br />
⋅ sinδ<br />
= t<br />
AP<br />
⋅ cosδ<br />
AB<br />
AP<br />
sin β<br />
⋅<br />
sin γ<br />
sinα<br />
t<br />
=<br />
sinγ<br />
t<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
B<br />
= X<br />
B<br />
BP<br />
AB<br />
+ t<br />
BP<br />
+ t<br />
→ t<br />
BP<br />
BP<br />
⋅ sinδ<br />
= t<br />
BP<br />
⋅ cosδ<br />
AB<br />
BP<br />
sinα<br />
⋅<br />
sin γ
41. Irányszöges előmetszés<br />
Ismert: A(YA,XA), B(YB,XB) valamint tájékozó irányokra való mérés A és B pontról<br />
Számítandó: P(YP,XP) módszer: szinusz-tétel<br />
A pontról B pontról<br />
tájékozás végrehajtása A ponton δ’AP<br />
tájékozás végrehajtása B ponton δ’BP<br />
tájékozott irányérték!<br />
tájékozott irányérték!<br />
α= δ’AP - δAB<br />
β= δBA - δ’BP<br />
sin β t<br />
=<br />
sin γ t<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
A<br />
= X<br />
42. Ívmetszés<br />
A<br />
AP<br />
AB<br />
+ t<br />
AP<br />
+ t<br />
→ t<br />
AP<br />
AP<br />
⋅ sinδ<br />
= t<br />
AP<br />
⋅ cosδ<br />
AB<br />
AP<br />
⋅<br />
sin β<br />
sin γ<br />
sinα<br />
t<br />
=<br />
sinγ<br />
t<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
B<br />
= X<br />
B<br />
BP<br />
AB<br />
+ t<br />
BP<br />
+ t<br />
→ t<br />
BP<br />
BP<br />
⋅ sinδ<br />
Ismert: A(YA,XA), B(YB,XB) valamint mérésből (kizárólag) a tAP és tBP távolságok<br />
Számítandó: P(YP,XP) módszer: koszinusz-tétel<br />
t<br />
2<br />
BP<br />
= t<br />
2<br />
AB<br />
+ t<br />
2<br />
t<br />
α = arccos<br />
2 ⋅t<br />
= t<br />
BP<br />
⋅ cosδ<br />
A pontról B pontról<br />
2<br />
AP<br />
− 2 ⋅t<br />
AB<br />
AB<br />
+ t<br />
⋅ t<br />
2<br />
AP<br />
AP<br />
AB<br />
⋅ t<br />
AP<br />
2<br />
− t BP<br />
⋅ cosα<br />
⋅ cosα<br />
2<br />
AP<br />
= t<br />
2<br />
AB<br />
+ t<br />
2<br />
BP<br />
2<br />
t<br />
β = arccos<br />
2 ⋅t<br />
− 2 ⋅t<br />
AB<br />
AB<br />
+ t<br />
⋅ t<br />
δ’AP = δAB - α δ’BP = δBA + β<br />
t<br />
2<br />
BP<br />
BP<br />
AB<br />
AB<br />
BP<br />
⋅ t<br />
2<br />
− t AP<br />
⋅ cosα<br />
sinα<br />
⋅<br />
sin γ<br />
BP<br />
⋅ cos β
Y<br />
P<br />
X<br />
P<br />
= Y<br />
A<br />
= X<br />
+ t<br />
A<br />
AP<br />
+ t<br />
⋅sin<br />
δ<br />
AP<br />
'<br />
AP<br />
⋅ cosδ<br />
43. Hátrametszés, veszélyes kör<br />
'<br />
AP<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
B<br />
= X<br />
+ t<br />
B<br />
BP<br />
+ t<br />
⋅ sinδ<br />
BP<br />
'<br />
BP<br />
⋅ cosδ<br />
Lényeg: ismeretlen álláspontról 3 ismert koordinátájú pontra végzünk iránymérést, ami alapján az<br />
ismeretlen álláspont koordinátája meghatározható.<br />
Veszélyes kör: A,B és C pontok köré írt kör. Ha P pont erre a körre esik, akkor végtelen sok megoldás<br />
létezik (azonos ívhez tartozó kerületi szögek elve miatt)<br />
Megoldás: lsd. honlapon „Hátrametszés” ANSERMET vagy COLLINS tetszés szerint választható<br />
http://users2.ml.mindenkilapja.hu/users/ferenczviktoria/uploads/Hatrametszes_megoldas.pdf<br />
44. Mérési vonalpontok<br />
45. Iránysorozat tájékozása<br />
Lépések:<br />
1. irányérték meghatározása (kollimációhiba számítása)<br />
2. ismert pontról ismert pontra menő irányokra irányszög és távolság számítása (δAi, tAi)<br />
3. tájékozási szögek számítása (zAi= δAi-lAi)<br />
4. alaptájékozási szög választása (MIN(zAi)=zk)<br />
5. eltérések számítása (∆Ai=zAI-zA)<br />
6. súlyok meghatározása (pAI=tAi [km])<br />
7. alaptájékozási szög kiválasztása (tájékozási szögek közül a legkisebb)<br />
8. középtájékozási szög meghatározása (zk=zA+(Σ pAI* ∆Ai/ Σ pAI))<br />
’<br />
9. ismert pontról ismeretlen pontra menő tájékozott irányérték számítása (δAi =zk+lAi)<br />
’<br />
10. irányeltérés számítása (ei= δAi- δAi )<br />
” ” ”<br />
11. lineáris eltérés számítása (Ei[cm]=tAi*ei /ρ , ahol ρ =206264,8)<br />
lsd. még<br />
http://users2.ml.mindenkilapja.hu/users/ferenczviktoria/uploads/Szamitasi_segedlet_tajekozas_vegreh<br />
ajtasahoz.pdf !<br />
46. Sokszögvonalak osztályozása<br />
Sokszögvonal típusa Csatlakozás Tájékozás<br />
Szabad vonal egyszeres (kezdőpont ismert) kezdőponton<br />
Egyszeresen tájékozott kétszeres (kezdőpont és végpont is<br />
ismert)<br />
kezdőponton<br />
Kétszeresen tájékozott kétszeres (kezdőpont és végpont is<br />
ismert)<br />
kezdőponton és végponton is<br />
Beillesztett kétszeres (kezdőpont és végpont is<br />
ismert)<br />
nincs!<br />
47. Sokszögvonal hibák elosztása<br />
Koordináta záróhiba: távolságok arányában<br />
Szögzáróhiba: a törésszögek között egyenletesen<br />
48. Mindkét végpontján csatlakozó sokszögvonal számítása<br />
http://users2.ml.mindenkilapja.hu/users/ferenczviktoria/uploads/Szamitasi_segedlet_2X_tajekozott_so<br />
kszogvonalhoz.pdf<br />
'<br />
BP
49. Beillesztett sokszögvonal<br />
http://users2.ml.mindenkilapja.hu/users/ferenczviktoria/uploads/Szamitasi_segedlet_beillesztett_soksz<br />
ogvonalhoz.pdf<br />
50. Durva mérési hiba keresése<br />
Szögmérésben elkövetett durva hiba (pl. elírás vagy rossz irányzás miatt)<br />
A módszer kétszeresen tájékozott sokszögvonal esetében alkalmazható, mivel itt van szögfeltétel.<br />
1. kiszámítjuk a sokszögvonalat a kezdőponttól a végpontig szabad vonalként<br />
2. kiszámítjuk a sokszögvonalat a végponttól a kezdőpontig szabad vonalként<br />
3. amelyik pontra a kétféle számítás egyező koordinátákat ad, ott van a szögmérési durva<br />
hiba<br />
Távolságmérésben elkövetett durva hiba<br />
A módszer minden olyan sokszögvonal esetében alkalmazható, ahol koordinátafeltétel felírható<br />
(vagyis a szabad vonal kivételével mindegyiknél).<br />
Kiszámítjuk a lineáris záróhiba irányszögét. A hiba nagy valószínűséggel ott van, ahol a<br />
sokszögoldal tájékozott irányértéke közel azonos vagy ellentétes a lineáris záróhiba<br />
irányszögével.<br />
51. Csatlakozás magasponthoz<br />
Alkalmazás: abban az esetben van rá szükség, ha a sokszögvonal kezdőpontja un. magaspont, pl.<br />
egy templomtorony, amely nem alkalmas műszerállásnak.<br />
52. Tahimetria elve és képletei<br />
Jelölések:<br />
K – magaspont (templomtorony)<br />
T – tájékozó irány (ismert pont)<br />
S – segédpont<br />
1 - sokszögpont<br />
Alapelve: részletpontok helyzetének meghatározása<br />
vízszintes helyzet: poláris helymeghatározó adatokkal<br />
magasság: trigonometriai magasságméréssel<br />
Kitűzünk egy S segédpontot, megmérjük az a távolságot,<br />
továbbá a ξ és az η szögeket, majd szinusz-tétellel kiszámítjuk a<br />
tK1 oldalhosszat. Ezután koordinátákból számítjuk a δKT<br />
irányszöget és a tKT távolságot, majd az ugyancsak megmért θ<br />
szög felhasználásával szinusz-tétellel kiszámítjuk az ε szöget,<br />
végül a háromszög harmadik szögeként a βK kezdőponti<br />
törésszöget, amely a sokszögvonal első törésszöge lesz.
Vízszintes helymeghatározás Magassági helymeghatározás<br />
Lsd. trigonometriai magasságmérés alapképlete!<br />
Ismert: A(YA,XA), T(YT,XT), tAP, φP<br />
δAT számítása δ’AP= δAT+φP<br />
Y<br />
P<br />
X<br />
P<br />
= Y<br />
A<br />
= X<br />
+ t<br />
A<br />
AP<br />
+ t<br />
⋅sin<br />
δ<br />
AP<br />
'<br />
AP<br />
⋅ cosδ<br />
'<br />
AP<br />
53. Elektronikus tahiméterek jellemzői<br />
- alkalmasak egyidejű irány- és távolságmeghatározásra<br />
- automatizált körleolvasás (vízszintes és magassági)<br />
- mérési eredmények javíthatók és redukálhatók<br />
- adatbevitel billentyűzetről, adatok tárolása memóriában, adatrögzítési lehetőség<br />
- kitűzési és pontkapcsolási feladatok megoldása (pl. hátrametszés)<br />
54. Tahiméteres mérés fázisai<br />
1) a tf ferde távolság meghatározása, majd megjavítása az összeadó- és a szorzóállandó,<br />
továbbá a meteorológiai javítás szorzótényezője utoljára meghatározott értékével<br />
2) a Hz vízszintes és a V magassági körleolvasás előállítása, majd megjavítása a kollimációhiba<br />
és az indexhiba utoljára meghatározott (a memóriában lévő) értékének hatásával;<br />
3) a tv vízszintesre redukált távolság, továbbá a műszer és a prizma fekvőtengelye közötti ∆H<br />
magasságkülönbség kiszámítása;<br />
4) a tf, Hz, V vagy a tv, Hz, ∆H eredményhármas kijelzése, majd külön utasításra az egyik<br />
értékhármas rögzítése<br />
55. Tahiméteres mérés fontosabb programjai<br />
– A szabad álláspontválasztás a műszerálláspont vízszintes koordinátáinak meghatározása<br />
ismert pontokra végzett szög- és távmérések eredményeiből (hátrametszés, ívmetszés). Az<br />
álláspont koordinátáinak meghatározása után a program tájékozza a vízszintes kört, a<br />
továbbiakban tehát a vízszintes körleolvasás helyett a kijelzés a tájékozott irányérték lesz.<br />
– A műszerálláspont magasságának meghatározása ismert (vagy megmért) távolságban<br />
lévő ismert magasságú pontokra végzett trigonometriai magasságmérés útján.<br />
– A vízszintes kör tájékozása ismert állásponton ismert (tájékozó) pont(ok)ra végzett<br />
iránymérés útján.<br />
– A poláris derékszögű átszámítás feltétele a vízszintes kör előzetes tájékozása, továbbá<br />
az álláspont vízszintes koordinátáinak és magasságának ismerete. A program a tahiméteres<br />
részletmérés eredményeiből kiszámítja a részletpont vízszintes koordinátáit és magasságát.<br />
– Az ellenőrző méretek számítása keretében a program a bemért pontok közül kiválasztott két<br />
pont vízszintes koordinátáiból és magasságából kiszámítja a két pont közötti vízszintes<br />
távolságot és a magasságkülönbséget
Kitűzések lsd. tanszéki honlapon található jegyzet!!!<br />
71. Térképek és adatnyerés<br />
Hagyományos: papírtérkép (hordozóanyag: papír, pausz, asztralon, üveg, stb…), amely egyszerre<br />
teljesíti az adatok tárolásának és megjelenítésének követelményeit<br />
Digitális: minden olyan térkép, amely teljesíti a térképekkel kapcsolatos követelményeket és<br />
számítógépen megjeleníthető (szkennelt, raszter, vektor)<br />
Elsődleges közvetlen: közvetlenül a terepről nyerünk adatokat<br />
Elektronikus tahiméterek (mérőállomások) terepfelmérés (vízszintes és magassági koordináták)<br />
GNSS (Global Navigation Satellite System) műholdas helymeghatározó rendszerek<br />
terepfelmérés, ellipszoidi, vízszintes+ magassági vagy 3D koordináta<br />
Elsődleges közvetett: közvetett adatnyerés történik, ami jelen esetben fényképeket és műholdas<br />
felvételeket és a kinyerhető adatokat jelenti<br />
Fotogrammetria: fényképmérés, speciális jelekkel ellátott fényképekből térbeli előmetszés<br />
alkalmazásával akár cm pontosságú vízszintes és magassági koordináták nyerhetők<br />
Távérzékelés: műholdképek - az információt a színek hordozzák! Elsődlegesen nem a geometria<br />
a lényeg, hanem a kapcsolódó információk (pl. művelési ágak, adott területen termesztett<br />
növények meghatározása, növénypusztulás feltérképezése)<br />
Másodlagos: már meglévő térkép digitalizálása<br />
72. Vektoros és raszteres ábrázolás
Vektoros jellemzői Raszteres jellemzői<br />
Geometria<br />
Pont, vonal, poligon, felület, test<br />
Pixel (síkban), voxel (térben)<br />
Topológia<br />
Geometriai elemek közötti kapcsolatok leírása<br />
Topológia alapesetben nincs<br />
Attribútum<br />
Attribútum<br />
Jellemző tulajdonság, amely a geometriai Jellemző tulajdonság, amely a pixelekhez<br />
elemekhez kapcsolódik (pl. vezetékhez tartozó<br />
feszültség értéke)<br />
kapcsolódik (spektrális tulajdonságok)<br />
Koordinátarendszerben (pl. EOV) elhelyezett Általában nincs koordináta rendszerben<br />
Pontos geometriát ábrázol Jellemző tulajdonságokat hordoz<br />
Állományok: shp, dwg, dxf, dgn, stb… Állományok: img, tiff, jpeg, png, stb..
73. Digitalizálás<br />
1. Automatikus digitalizálás (szkennelés) ( eredménye egy raszterkép!!)<br />
2. Táblás (hagyományos) digitalizálás ( eredménye vektoros állomány!!)<br />
Digitalizáló asztallap: egymásra merőleges huzalozású vezetékháló, ami a kurzor tekercse által<br />
gerjesztett teret érzékeli
Kurzor: tekercs, nagyító, szálkereszt, világítás, billentyűzet<br />
74. Koordináta transzformáció szükségessége digitalizálás során<br />
(Megértéshez: A hagyományos digitalizálás során egy papír alapú térképet szeretnénk vektoros<br />
állománnyá (pl. AutoCad) alakítani úgy, hogy a digitalizáló táblára rögzített térképen egérrel tesszük le<br />
a pontokat és húzzuk meg a vonalakat. A papírtérképen szerepel, hogy milyen koordináta<br />
rendszerben és méretarányban ábrázolták a pontokat és szerepelnek rajta az<br />
őrkeresztek/koordinátahálózati értékek is. A digitalizáló táblának azonban saját koordináta rendszere<br />
van – a rá rögzített térkép is ebben van! -, amely nem egyezik meg a térkép koordináta rendszerével.<br />
A térkép koordináta rendszere és a digitalizáló tábla koordináta rendszere között síkbeli<br />
transzformáció teremti meg a kapcsolatot, vagyis azt, hogy ha az egérrel egy pontot megadunk a<br />
papírtérképen a digitalizáló tábla koordináta rendszerében, akkor azt a megfelelő szoftver egy<br />
képlettel automatikusan a papírtérkép eredeti koordináta rendszerébe számítja át és így a megfelelő<br />
helyre kerül a pont/vonal a digitális állományban.)<br />
Hagyományos digitalizálás: a (papír)térkép eredeti koordináta rendszere és a digitalizáló tábla<br />
koordináta rendszere különböző, a koordináták átszámításához síkbeli transzformációs egyenleteket<br />
használnak.<br />
(Megértéshez: Az automatikus digitalizálás során egy papír alapú térképet szeretnénk raszteres<br />
állománnyá (pl. jpeg) alakítani, majd ezt térinformatikai rendszerbe beolvasni és a vonalakat/pontokat<br />
megrajzolni. A szkennelés eredménye egy kép, amelynek saját koordináta rendszere van (bal alsó<br />
sarka az origo, x tengely vízszintes, y tengely függőleges). A képet a térinformatikai rendszerben a<br />
térkép eredeti helyére (koordináta rendszerébe) kell helyezni, amit a fentiekhez hasonlóan síkbeli<br />
transzformációval teszünk meg.)<br />
Automatikus digitalizálás: a szkennelt kép formátumú térkép (kép)koordináta rendszere és a<br />
papírtérkép eredeti koordináta rendszere különböző, a koordináták átszámításához – így a szkennelt<br />
térkép koordináta rendszerbe illesztéséhez - síkbeli transzformációs egyenleteket használnak.<br />
75. Transzformációk és alkalmazásuk<br />
Síkbeli hasonlósági (Helmert) transzformáció<br />
Az eredeti és a kép koordináta-rendszer közötti kapcsolatot elforgatással, méretarány-váltással és<br />
eltolással adhatjuk meg. (A két koordináta-rendszer kezdőpontja nem esik egybe (eltolás), az eredeti<br />
és a korrigált koordináta-rendszer megfelelő tengelyei j szöget zárnak be egymással (j szögű<br />
elforgatás), valamint tengelyirányú léptékváltás történhet).
Y = bx + ay + c = Y + ( k ⋅sin<br />
α)<br />
x + ( k ⋅ cosα<br />
) y<br />
X = ax − by + c = X<br />
1<br />
1<br />
0<br />
0<br />
− ( k ⋅sin<br />
α)<br />
y + ( k ⋅ cosα<br />
) x<br />
Ahol<br />
Y0, X0 a két koordinátarendszer origója által meghatározott vektor koordinátái (eltolás),<br />
α a két koordináta rendszer elforgatási szöge<br />
k a méretaránytényező<br />
Síkbeli affin transzformáció<br />
A hasonlósági transzformációkkal megegyező, de a különböző tengelyeken eltérő mértékű<br />
léptékváltást is engedélyező koordináta-transzformáció. Figyelembe vehető vele a térképlapok két<br />
merőleges koordinátatengely irányában eltérő torzulása!<br />
Y = a1 * x + b1 * y + c1<br />
X = a2 * x + b2 * y + c2<br />
Síkbeli magasabb-fokú polinomos transzformáció<br />
Az elsőrendű (minden koordináta az első hatványon) transzformációk (Helmert, affin) alkalmazását<br />
olyan esetekben tehetjük meg, amikor a szükséges változtatások lineáris jellegűek és a<br />
transzformáció során megengedhető, hogy egyenes képe szintén egyenes legyen. Nemlineáris<br />
torzulások esetén olyan transzformációkra van szükség, amelyek nem lineáris változtatásokkal ezeket<br />
korrigálni tudják. A koordinátáinak transzformációjához itt is egyenleteket - polinomokat - használunk.<br />
A torzultságától, az illesztési pontok számától és egymáshoz viszonyított elhelyezkedésüktől függő<br />
összetett polinomok szükségesek a kellő transzformáció végrehajtásához. Ezekben a polinomokban<br />
már nem csak első hatványon szerepelnek a koordináták.<br />
76. Digitalizálás munkafolyamata