A műholdas helymeghatározás alapjai
A műholdas helymeghatározás alapjai
A műholdas helymeghatározás alapjai

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Népszerűen a <strong>műholdas</strong> <strong>helymeghatározás</strong>ról és navigációról<br />
1. rész<br />
Az idő mérése, karóránk leolvasása,<br />
ma mindannyiunk számára természetes tevékenység.<br />
De vajon ugyanilyen természetes és szükséges lesz-e a jövőben a „hely” mérése is?<br />
Pillanatnyi földrajzi helyzetünk, tartózkodási helyünk<br />
– a Földünk körül keringő navigációs mesterséges holdak révén – már ma is mérhető.<br />
A <strong>műholdas</strong> <strong>helymeghatározás</strong>ról szóló sorozatunk első részében<br />
a működés alapelemeit ismerhetjük meg.<br />
A <strong>műholdas</strong> <strong>helymeghatározás</strong> <strong>alapjai</strong><br />
GPS vagy GNSS?<br />
Néhány éve a napilapok is hírül adták, hogy Szeged közelében elraboltak egy árúval<br />
megrakott kamiont: a rablók csuklyát húztak a sofőr fejére, majd a rabolt járművel elhajtottak.<br />
A rendőrség azonban hamarosan körbevette azt a tanyát, amely a lopott árú tárolására szolgált<br />
volna. A rablók ugyanis nem tudták, hogy a kamion GPS-szel volt felszerelve, így a jármű<br />
útját egy diszpécser központban nyomon követték… Németországban nemrég áttértek az úthasználattal<br />
arányos autópályadíj fizető rendszerre a teherforgalomban. Ennek alapja is egy, a<br />
járműbe épített GPS-szerkezet, amely automatikusan regisztrálja az autópályán megtett kilométereket…<br />
Lehetne sorolni azokat a példákat, amelyekben a műholdakon alapuló földrajzi<br />
helyzetmeghatározás fontos szerephez jut a felhasználó biztonsága, tájékozódása, informálása<br />
érdekében. Mi is a <strong>műholdas</strong> <strong>helymeghatározás</strong>, aminek bárki által hozzáférhető formája és<br />
közkeletű elnevezése a GPS [dzsí-pí-esz]?<br />
A GPS rövidítés jelentése: globális helymeghatározó rendszer (Global Positioning<br />
System). Helyesebb azonban a GNSS (Global Navigational Satellite System) rövidítést használni,<br />
amikor általánosságban beszélünk a műholdakon alapuló, az egész földkerekségre kiterjedő,<br />
a <strong>helymeghatározás</strong>t és a navigációt szolgáló rendszerekről. A <strong>helymeghatározás</strong>ban a<br />
„hol vagyunk” kérdésre keresünk egzakt választ, a navigáció során pedig a „hogyan jutunk el<br />
a célpontig” kérdést tesszük fel. A navigáció feltételezi a pillanatnyi helyzet ismeretét is.<br />
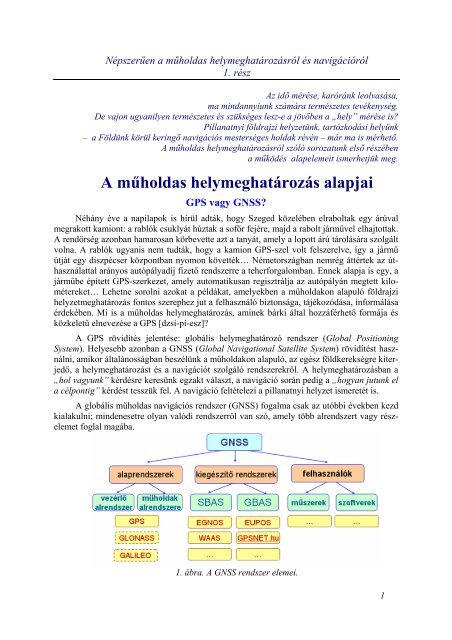
A globális <strong>műholdas</strong> navigációs rendszer (GNSS) fogalma csak az utóbbi években kezd<br />
kialakulni; mindenesetre olyan valódi rendszerről van szó, amely több alrendszert vagy részelemet<br />
foglal magába.<br />
1. ábra. A GNSS rendszer elemei.<br />
1
A GNSS egyik összetevőjét jelentik az alaprendszerek: ilyen a már említett, amerikai<br />
fenntartású GPS rendszer, de ilyen alaprendszer az orosz fenntartású Glonassz rendszer, és<br />
ilyen lesz az európai Galileo rendszer is (részletesebben a sorozat 3. részében). Tehát máris<br />
három alaprendszert említhetünk s várható, hogy az űr-hatalmak (például Kína) továbbiakat is<br />
létrehoznak majd. Tény, hogy ma még a <strong>műholdas</strong> <strong>helymeghatározás</strong> a gyakorlatban szinte<br />
kizárólag az amerikai GPS alaprendszer használatát jelenti, de ez a jövőben változni fog.<br />
Ezért helyesebb, ha a GNSS fogalmat általános értelemben használjuk, a GPS-t pedig csak az<br />
amerikai alaprendszerre. Az alaprendszerek fogalmába tartoznak a navigációs mesterséges<br />
holdak (nevezik űrszegmensnek is) és ezen holdak vezérlését ellátó földi követő állomások, a<br />
vezérlő szegmens.<br />
A GNSS következő összetevőjét jelentik az ún. kiegészítő rendszerek: ezek lehetnek<br />
geoszinkron műholdak vagy ismert helyzetű földi pontokon folyamatosan üzemelő, úgynevezett<br />
permanens állomások (részletesebben a sorozat 2. részében).<br />
Végül a GNSS elemei maguk a felhasználók is. A felhasználónak rendelkeznie kell a<br />
műholdjelek vételére alkalmas GPS (pontosabban: GNSS) vevővel, ami nagyon változatos<br />
célú, formájú, szolgáltatású lehet. Külön érdemes kiemelni a vevőbe telepített vagy különállóan<br />
használható szoftvereket, amelyek a mérés feldolgozását, megjelenítését, értéknövelt szolgáltatását<br />
biztosítják s fejlettségük egyre meghatározóbb (részletesebben a sorozat 4. részében).<br />
Mit látunk a múlt kútjában?<br />
Az űr-korszak a két, akkoriban szembenálló nagyhatalom, a Szovjetunió és az Amerikai<br />
Egyesült Államok versenyével indult. Az első mesterséges holdat, a Szutnyik1-et, 1957. októberében<br />
indították el a Szovjetunióban, majd 1958. januárjában az Egyesült Államok Explorer-1<br />
műholdja is eljutott a világűrbe.<br />
A <strong>műholdas</strong> <strong>helymeghatározás</strong> és navigáció múltja is szinte egyidős a műholdak megjelenésével.<br />
Az USA-ból 1960. áprilisában indult a világűrbe az első kísérleti navigációs műhold,<br />
a Transit-1B. Ezzel az amerikaiak egy olyan, a Doppler-hatás elvén működő globális<br />
helymeghatározó rendszer kiépítését kezdték el, amely elsősorban a hadihajók és a tengeralattjárók<br />
navigálását szolgálta. A Transit rendszer másik rövidítésére az NNSS betűjelzést<br />
használták, ami egyértelműen a haditengerészeti alkalmazásra utal (Navy Navigation Satellite<br />
System). A Transit rendszer teljes kiépítésében hét darab, közel kör alakú pályán 1100 km<br />
magasságban keringő mesterséges holdból állt. A műholdak két frekvencián sugároztak mérőjeleket,<br />
amelyek segítségével kb. 20 perces mérésből mintegy 50 méteres pontossággal lehetett<br />
a földrajzi helyzetet meghatározni, de csak a nap meghatározott időszakában. A Transit<br />
rendszert 1967-től polgári célra is elérhetővé tették és egészen 1994-ig, a GPS teljes kiépítéséig<br />
üzemelt. Hasonló rendszer működött Cikada néven a Szovjetunióban is.<br />
A Transit rendszer tapasztalatai és egy, az egész földkerekségre kiterjedő, a katonai<br />
járművek, rakéták navigációját szolgáló rendszer iránti igény vezetett el az amerikai GPS kifejlesztéséhez.<br />
A fejlesztést az Amerikai Egyesült Államok védelmi minisztériuma<br />
(Department of Defense – DoD) kezdeményezte 1973-ban, és jelenleg is a DoD a GPS rendszer<br />
fenntartója. Bár a rendszer elsődleges célja a katonai igények kielégítése volt, bizonyos<br />
korlátozásokkal a polgári felhasználók számára is hozzáférhetővé tették, mégpedig ingyenesen.<br />
A hozzáférést és az ingyenességet amerikai elnöki rendeletek szavatolják. Az első kísérleti<br />
GPS holdakat 1978 és 1980 között bocsátották fel. A cél az volt, hogy a Földön bárhol,<br />
bármikor, bármilyen időjárási körülmények között biztonságosan, gyorsan (másodpercek<br />
alatt) és megfelelő pontossággal lehessen a földrajzi helyzetet meghatározni. Ezt legalább 24<br />
darab mesterséges hold megfelelő pályára juttatásával tervezték elérni.<br />
2
Mivel egy-egy műhold élettartama korlátozott (kezdetben 5 éves műhold működőképességgel<br />
számoltak), valamint a költséges <strong>műholdas</strong> alrendszer kiépítése is időt igényelt, a GPS<br />
rendszer teljes kiépítését 1994-ben érték el. Azóta a működésüket befejezett holdak pótlása,<br />
korszerűbb típusokkal való felcserélése folyik, továbbá az egész rendszer fejlesztése, amit<br />
GPS-modernizációnak neveznek. A GPS rendszerben a műholdak mintegy 20200 km-re keringenek<br />
a Föld felszíne felett, így pályájuk nyugodtabb, zavarmentesebb, mint a Transit holdaké<br />
volt.<br />
2. ábra. Az amerikai NAVSTAR GPS terv: 24 műhold kering 6 Föld körüli pályán<br />
egyenletes eloszlásban (Peter Dana rajza).<br />
Párhuzamosan az amerikaiakkal, a Szovjetunió is kiépített egy <strong>műholdas</strong> navigációs<br />
rendszert, aminek rövidítése GLONASSZ (Globalnaja Navigacionnaja Szputnyikovaja<br />
Szisztyema). Az első három Glonassz-holdat egyetlen Proton-típusú rakéta juttatta Föld körüli<br />
pályára 1982 októberében. Ebben a rendszerben is 24 műholdból állna a <strong>műholdas</strong> alrendszer,<br />
azonban ezt csak rövid időre sikerült elérni, jelenleg a szükséges számú műholdaknak csak<br />
mintegy a fele működik. Bár a Glonassz rendszer is használható polgári célra és orosz elnöki<br />
rendeletek biztosítják a jövőbeni továbbfejlesztését, világméretekben nem terjedt el.<br />
2005. december 28-án fellőtték az európai Galileo elnevezésű <strong>műholdas</strong> alaprendszer<br />
első műholdját. Az Európai Űrügynökség és az Európai Unió közös finanszírozásában megvalósuló,<br />
polgári célú <strong>műholdas</strong> navigációs rendszer teljes kiépítése 2010 körül várható.<br />
A gyakorlatban jelenleg szinte kizárólagosan az amerikai GPS-t használják, ezért annak<br />
konkrét működését érdemes megismerni.<br />
Mi az alapelv?<br />
Ha geometriai szempontból kívánjuk megismerni a <strong>műholdas</strong> <strong>helymeghatározás</strong> elvét,<br />
akkor az nagyon egyszerűnek tűnik. Tekintsük ismertnek három pont helyzetét a térben (egy<br />
térbeli derékszögű koordináta-rendszerben) s legyen ismeretlen egy negyedik pont. A három<br />
ismert pontot három műhold jelenti egy adott időpillanatban, az ismeretlen pont pedig a felhasználó<br />
GPS-vevőjének helye. Ha megmérjük a vevő távolságát a műholdaktól, akkor a vevő<br />
helyzete kiszámítható.<br />
Elképzelhetünk három olyan gömböt a három ismert pont körül, amelyek sugara a mért<br />
távolság. Geometriai értelemben két gömb egy körben metsződik, amely körrrel a harmadik<br />
gömbnek két metszéspontja van, ezek a geometriai feladat elvi megoldásai.<br />
3
3. ábra. A <strong>műholdas</strong> <strong>helymeghatározás</strong> geometriai elve: három távolságmérés alapján,<br />
három ismert sugarú és középpontú gömb metszése adja a földi ismeretlen pont helyzetét.<br />
Ha figyelembe vesszük, hogy a Föld sugara 6370 km, a mért távolságok pedig 20000<br />
km-es nagyságrendűek, akkor a két megoldásból egyértelműen kiválasztható a földfelszínközeli<br />
valós érték.<br />
Hogyan történik a műhold-vevő távolság mérése? Ehhez mind a műholdon, mind a vevőben<br />
egy nagypontosságú órát helyeznek el, s egy meghatározott időpillanatban mindkét<br />
egység egy rádiójelet generál. Úgy tekinthetjük, hogy a vevő a műhold által kibocsátott rádiójel<br />
beérkezésének időpontját méri a saját órája szerint, azaz meghatározza a fénysebességgel<br />
terjedő rádiójel futási idejét. A futási idő és a fénysebesség ismeretében a megtett út számítható.<br />
Eddigi okfejtésünkben hallgatólagosan azt feltételeztük, hogy a műhold és a vevő órája<br />
tökéletesen szinkronizált, azonos időrendszerben jár, ami azonban a valóságban nem teljesül.<br />
Ugyanis míg a műholdakon „drágább”, pontosabb atomórát alkalmaznak, addig a vevőbe egyelőre<br />
nem építhető be a szükséges pontosságú atomóra, így a vevő órahibájával számolni kell,<br />
azt csak számítással lehet meghatározni. Ebből pedig az következik, hogy nemcsak a vevő<br />
pillanatnyi három térbeli koordinátáját, hanem a vevő órahibáját is számítani kell, következésképpen<br />
pedig három helyett legalább négy műhold észlelésére van szükség.<br />
A GPS-vevő a pozícióját elsődlegesen az ún. WGS84 (World Geodetic System) koordináta-rendszerben<br />
határozza meg, amely egyben egy olyan forgási ellipszoidot is jelöl, amely<br />
az egész Föld tömegét magában foglalja. A három koordináta: az ellipszoidi földrajzi szélesség<br />
(az Egyenlítő síkjától mérve), a földrajzi hosszúság (a greenwichi kezdőmeridiánhoz viszonyítva)<br />
és a vonatkoztatási ellipszoid feletti magasság. Ezek a koordináták a helyileg szokásos<br />
térképi koordináta-rendszerbe is átszámíthatók.<br />
Mi a GPS műholdak szerepe?<br />
A műholdak szerepe kettős: egyrészt olyan rádiójeleket kell sugározniuk, amelyek magát<br />
a távolságmérést biztosítják, másrészt pedig a saját helyzetükre vonatkozó információkat<br />
(ún. pályaadatokat) kell továbbítaniuk. Mint említettük, legalább négy műholdnak kell rendelkezésre<br />
állni, ezt a darabszámot 15º-os kitakarási szög fölött kívánjuk meg.<br />
4
4. ábra. GPS műhold a NASA fantázia-rajzán.<br />
Az amerikai GPS műholdak mindegyike ugyanazt a két vivőfrekvenciát állítja elő. Az<br />
L1 jelű vivőhullám frekvenciája 1575,42 Mhz, hullámhossza közel 19 cm; az L2 jelű vivőhullám<br />
frekvenciája 1227,60 Mhz, ez kerekítve 24 cm-es hullámhossznak felel meg. A vivőhullámokat<br />
kódokkal és adatokkal modulálják. Az egyik kód, amellyel az L1 frekvenciát modulálják<br />
(és amelyet minden GPS-vevő is ismer) a C/A jelű kód. Ez 1023 kódelemet tartalmaz, a<br />
teljes kód másodpercenként ezerszer ismétlődik. Minden egyes GPS műholdhoz más-más<br />
egyedi kód van hozzárendelve, ez teszi lehetővé a műholdak azonosítását. A kód szerepe lényegében<br />
a kódmérés biztosítása. A műholdról érkező jel kódját a vevő összehasonlítja az<br />
általa előállított replika-kóddal. Az összehasonlítás végeredménye a kódelemek száma, ami<br />
lényegében a futási időnek felel meg, amiből – a már említett módon – a műhold-vevő távolság<br />
keletkezik. Az így kapott kódtávolságokat nevezik pszeudótávolságnak is, ami arra utal,<br />
hogy ezt a nyers távolságot még javítani kell a vevő órahibájából származó távolság-értékkel.<br />
A mért műhold-vevő távolságok nagyságrendje 20000 és 26000 km között változik. Ez a<br />
kódmérés minden másodpercben (de akár tizedmásodpercenként is) automatikusan megtörténik,<br />
ebből következően a földrajzi hely koordinátái egy GPS-vevő kijelzőjén másodpercenként<br />
követhetők.<br />
A vivőhullám fázishelyzetének megmérésével ún. fázismérés is végezhető, ami nagyságrendileg<br />
pontosabb a kódmérésnél, azonban ehhez előbb vissza kell állítani a vivőfázist,<br />
valamint ismeretlen értékként kell kezelni a mérés kezdetén az egész periódusok számát. Így<br />
ezt a mérés-típust csak speciális, a nagy pontosságot biztosító geodéziai vevőknél használják.<br />
A C/A kódon kívül más kód is létezik, de azt elsősorban katonai vevőkészülékekbe építik be.<br />
Az amerikaiak a jövőben is elkülönítik a katonai és polgári igényeket, továbbra is fenntartják<br />
a katonai kódot. A GPS modernizáció keretében tervezik a C/A kód használatát az L2 vivőfrekvencián,<br />
továbbá egy újabb, L5 jelű vivőfrekvencián is terveznek sugárzást.<br />
A GPS műholdak ún. navigációs üzeneteket is sugároznak a két vivőfrekvencián. Ilyen<br />
üzenet például a műholdak órahibája egy földi atomidő-rendszerhez képest, vagy ilyen üzenetet<br />
képeznek az egyes műholdak pályaadatai. A pályaadatok olyan paraméterek, amelyek lehetővé<br />
teszik egy-egy műhold helyzetének kiszámítását egy adott időpillanatban. Geometriai<br />
értelemben azért tekinthetők a műholdak ismert helyzetűeknek, mert ezt az információt saját<br />
maguk sugározzák, ezek az ún. fedélzeti pályaadatok. Léteznek ún. durva pályaadatok is, ezeket<br />
almanach adatoknak nevezzük. Az almanach-adatokat a vevők megőrzik, és ez bekapcsoláskor<br />
segít az észlelhető holdak gyors kiválasztásában (amennyiben néhány száz kilométeres<br />
5
körzeten belül használjuk a vevőt). Minden műhold az összes többiről „tudja”, hogy az működőképes-e<br />
vagy sem s ezt az információt is továbbítja. A navigációs üzeneteket természetesen<br />
nem a műholdak „tudják”, hanem ezt az információt egy földi irányító központ juttatja fel a<br />
fedélzetre.<br />
Az amerikai GPS műholdak hat darab, közel kör alakú pályán keringenek a Föld körül,<br />
mindegyik pályasík 55º-os hajlásszöget zár be az Egyenlítő síkjával, a keringési idő négy perc<br />
híján 12 óra. A tervek szerint egy-egy pályán négy hold keringene, de jelenleg összesen 29<br />
működő holdja van az amerikai rendszernek. Az első műholdakon egy-egy cézium és rubídium<br />
atomórát (frekvenciaetalont) helyeztek el. A legújabb GPS holdakon három rubídium<br />
atomóra van ezek nagyságrenddel pontosabbak, mint elődeik.<br />
Mi a vezérlő alrendszer szerepe?<br />
A vezérlő alrendszer földi követő állomásokat jelent, és a <strong>helymeghatározás</strong> fordított<br />
feladatát kell megoldania. Nem a műholdak alapján a saját helyét kell meghatároznia, hanem<br />
saját helyének ismeretében a műholdak helyzetét, a műholdpályák paramétereit kell megadnia.<br />
A követőállomások a WGS84 koordináta-rendszerben ismert pontokon folyamatosan<br />
üzemelő GPS-vevők. A mérési eredményeket egy vezérlő központba továbbítják, ahol kiszámítják<br />
a műholdak pályaadatait, meghatározzák a műholdak órahibáit és más egyéb adatokkal<br />
együtt ezeket feljuttatják a műholdakra. Így megkülönböztetünk injektáló állomást, vezérlőállomást<br />
és egyszerű követőállomást.<br />
5. ábra. A NAVSTAR GPS vezérlő alrendszere.<br />
Az eredeti öt földi követőállomást nagyobb háromszög jelöli.<br />
Az amerikai GPS rendszernek kezdetben öt követő állomása volt, mindegyik amerikai<br />
katonai támaszponton helyezkedett el. Jelenleg 15 állomás alkotja a vezérlő alrendszert, ezeket<br />
az amerikai légierő és az amerikai katonai térképészeti szolgálat tartja fenn. A vezérlő<br />
állomás Colorado Springs-ben van egy légitámaszponton. A földi követő állomások valósítják<br />
meg a gyakorlatban a WGS84 vonatkoztatási rendszert.<br />
A vezérlő alrendszer feladata tehát a műholdak adatokkal való ellátása. Itt talán érdemes<br />
megjegyezni, hogy nemcsak „helyes” hanem „helytelen” adatok is származtak a vezérlő központból.<br />
Az amerikai GPS kiépítése ugyanis „túl jó sikerült”, legalábbis ezt állapították meg<br />
az első, az 1980-as években végzett tesztek alapján: a <strong>helymeghatározás</strong> pontossága akkor 20<br />
m-en belül volt s ezt a bárki által elérhető pontosságot akkor „veszélyesnek” ítélték. Ezért a<br />
műholdak második generációját úgy tervezték meg, hogy a műholdórák hibáját és a pályaadatokat<br />
szándékosan torzítva, hibásan továbbíthassák. Ezt nevezték el „korlátozott hozzáférés”-<br />
nek (Selective Availability–SA). Ez a technikai-műszaki lehetőségeket szándékosan rontó politika<br />
1990-től 2000-ig volt érvényben és kiváltotta a polgári felhasználók rosszallását.<br />
6
Ugyanis a DoD vízszintes értelemben 100 méteres, magassági értelemben 150 m-es<br />
pontosságot garantált csak a <strong>helymeghatározás</strong>ban az SA bekapcsolás idején. Amerikai elnöki<br />
rendeletre 2000. május 2-án az SA-t kikapcsolták, azóta a GPS pontossága 10 méterre tehető;<br />
a hivatalosan garantált érték 22 méter.<br />
Milyen pontos a GPS?<br />
A GPS pontossága az előbb említett 100 métertől a milliméteres tartományig terjedhet.<br />
Hogyan lehetséges ilyen szélső határok között megállapítani a pontosságot? A válasz megadásához<br />
a GPS hibaforrásait kell számba vennünk. Tekintsünk most el az SA szándékos rontó<br />
hatásától. Ekkor is számolnunk kell azzal, hogy a műholdak pályáját a földi követő állomások<br />
csak néhány méteres pontossággal tudják meghatározni, következésképpen ez a hiba a mért<br />
műhold-vevő távolságokat közvetlenül terheli. Hasonló a helyzet a műholdak órahibáinak<br />
meghatározásánál. A legjelentősebb hibaforrás azonban a légkör, pontosabban a légkör 50 és<br />
1000 km közötti rétege, az ionoszféra. Az ionoszférában a nap ionizáló ultraibolya sugárzásának<br />
hatására elektromos töltésű részecskék vannak, amelyek módosítják a rádióhullámok terjedési<br />
sebességét. Ennek hatása a mért műhold-vevő távolság hibája – a napszaktól, az évszaktól,<br />
sőt a napfolttevékenységtől függően – akár 30 méteres is lehet. Magának a kódmérésnek<br />
is lehet közel méteres hibája. Méteres nagyságrendű hibát okozhat, ha nem a közvetlenül<br />
érkező jelet, hanem a környező tárgyakról visszavert jelet veszi a vevő. Mindezen hibahatások<br />
következtében az egy vevővel, kódméréssel elérhető pontosság ma 10 méterre tehető, ha legalább<br />
4-6 holdat tudunk észlelni.<br />
Könnyen belátható, hogy a pontosság attól is függ, hogy az észlelhető műholdak a horizonton<br />
és a zeniten egyenletesen helyezkednek-e el, vagy esetleg „egy csomóban” vannak.<br />
Utóbbi esetben gyenge geometriáról, előbbi esetben erős geometriáról beszélünk, amit egy<br />
objektív számadattal, a DOP értékkel jellemznek. A DOP-érték szó szerint a „pontosság hígulását”<br />
jelenti (Diluation of Precision), gyakorlatilag azt, hogy a vevő helyzetéhez viszonyítva<br />
a műholdak kis látókúpban helyezkednek el, ezért az óhatatlanul jelenlévő mérési hibák hatása<br />
felnagyítódik.<br />
Mit tehetünk, ha az előbb említett 10 méteres pontosság nem felel meg céljainknak?<br />
Vagy modellezzük az említett hibahatásokat és mint korrekciót figyelembe vesszük a számításnál,<br />
vagy pedig két vevőt alkalmazunk. Az egyik vevőt ismert ponton telepítjük, számítjuk<br />
az ismert műhold-vevő távolságok és a mért távolságok különbségeit és ezekkel a különbségekkel<br />
megjavítjuk az ismeretlen ponton észlelő vevő mérési eredményeit. Ez az ún. differenciális<br />
(vagy relatív) módszer. A pontosabb méréseknél ezért az egyetlen vevővel végzett, ún.<br />
abszolút <strong>helymeghatározás</strong> helyett differenciális vagy relatív <strong>helymeghatározás</strong>t alkalmaznak.<br />
Lényegében abból a feltevésből indulnak ki, hogy az ismert ponton és az ismeretlen ponton<br />
mérő két vevőnél ugyanazon hibahatások jelentkeznek. Ez a feltevés csak akkor állja meg a<br />
helyét, ha a két földi pont közötti távolság „nem túl nagy”. A relatív <strong>helymeghatározás</strong>t nemcsak<br />
kódmérés esetén, hanem fázismérés esetén is alkalmazzák a gyakorlatban. Ez utóbbi<br />
esetben valóban elérhető a cm-es pontosság az adott ponthoz viszonyítva, ami több tíz kilométerre<br />
is lehet.<br />
A bevezetőben említett GNSS infrastruktúra célja az, hogy ne magunknak kelljen telepíteni<br />
egy második vevőt, hanem az ismert ponton vagy inkább pontokon folyamatosan üzemelő<br />
vevők adatait vagy az általuk generált korrekciókat átvehessük. Vagyis méteres,<br />
szubméteres vagy centiméteres pontosságot érjünk el egy szolgáltatás révén.<br />
Mi a felhasználó dolga?<br />
A felhasználónak rendelkeznie kell egy GPS vevőkészülékkel. Igen sokféle kivitelű,<br />
szolgáltatású, kiépítettségű GPS-vevő van a piacon. A legegyszerűbbek a néhány tízezer fo-<br />
7
intért megvásárolható navigációs vevők. Ha az égboltra szabad kilátást biztosító helyen bekapcsolunk<br />
egy ilyen vevőt, az néhány másodperc múlva „ráhangolódik” a GPS-műholdakra,<br />
kódmérés alapján meghatározza és kijelzi a földrajzi koordinákat: a szélességet, a hosszúságot<br />
és magasságot. Mutatja az egyes műholdak jelerősségét (jel-zaj viszonyt), a geometria erősségét<br />
(DOP-értéket) és készenlétét a navigációra. Egy célpont megadása (kiválasztása) után,<br />
mutatja a célpont irányát és távolságát. Ha mozgás közben használjuk, akkor – mivel másodpercenként<br />
meghatározza koordinátáinkat – kiszámolja haladási sebességünket és irányunkat.<br />
Ennek alapján megbecsüli a célpontig hátralévő időt vagy a megérkezés időpontját. Számos<br />
más navigációs szolgáltatás is lehetséges a beépített szoftver függvényében.<br />
6. ábra. Baloldalt: kézi navigációs GPS vevő. A helyi koordináták mellett mutatja a műholdak<br />
elhelyezkedését az égbolton és a jelerősségüket.<br />
Jobb oldalon: A GPS vevővel összekapcsolt kézi számítógép útvonalat tervez és navigál.<br />
Ha autós vagy gyalogos turistaként használjuk a GPS-vevőt, akkor a tájékozódásban<br />
sokat segít egy képernyős háttértérkép. Nemcsak digitális, beépített autóstérképek, hanem<br />
utcaszintű településtérképek is készültek az utóbbi időben. Létezik olyan magyar nyelvű<br />
szoftver, amely egy település, utca, házszám megadása után a pillanatnyi helyszíntől a célpontig<br />
egy útvonalat generál a térképen, és hanggal navigál az egyes kereszteződéseknél.<br />
A <strong>műholdas</strong> navigáción alapuló alkalmazások köre csak most körvonalazódik: a precíziós<br />
mezőgazdaságtól az intelligens közlekedési rendszerekig számos, az életminőséget javító<br />
szolgáltatás van kialakulóban.<br />
Dr. Busics György<br />
bgy@geo.info.hu<br />
Nyugat-Magyarországi Egyetem<br />
Geoinformatikai Főiskolai Kar<br />
8