CAPITOLO 3 - Dimeca
CAPITOLO 3 - Dimeca
CAPITOLO 3 - Dimeca

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
<strong>CAPITOLO</strong> 3<br />
DINAMICA DEI SISTEMI FLUIDI<br />
I sistemi idraulici a flusso incompressibile<br />
Come noto un flusso si definisce incompressibile se la densità non varia con la pressione.<br />
Tale comportamento che è tipico dei fluidi incomprimibili come i liquidi, può essere esteso<br />
anche ai gas, che per loro natura sono dei fluidi comprimibili, solo se non si verificano dei<br />
forti gradienti di pressione.<br />
3.1 Reti idrauliche<br />
La trasmissione di energia mediante dei circuiti idraulici piò o meno complessi comporta<br />
l’interconnessione di differenti componenti. Poiché il comportamento dei componenti<br />
idraulici viene descritto da relazioni che legano i segnali di ingresso con quelli in uscita come<br />
la portata e la pressione, la presenza di tali interconnessioni, introdurrà dei legami fra le<br />
diverse variabili. Molte di queste relazioni richiamano per analogia le leggi delle reti<br />
elettriche se si associa alla corrente elettrica la portata volumetrica e al potenziale elettrico la<br />
pressione.<br />
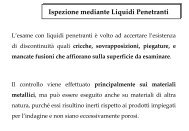
Il principio di conservazione della massa, applicato alle reti idrauliche ovvero ai punti in cui<br />
confluiscono più rami o linee del circuito (nodi del circuito idraulico), ha la stessa importanza<br />
attribuita alla legge di Newton per i sistemi meccanici e si esprime con la seguente relazione:<br />
dM<br />
dt<br />
.<br />
.<br />
= min<br />
− mout<br />
= 0<br />
dove M è la massa di fluido nella connessione ed m in ed mout<br />
sono le portate massiche di<br />
fluido che complessivamente si presentano in ingresso ed in uscita dalla connessione. Tale<br />
relazione in fondo stabilisce che tutta la portata entrante si ritrova in uscita dal nodo.<br />
Nell'ipotesi di un nodo verso il quale confluiscono più rami, l'equazione 3.1) può essere<br />
espressa come<br />
m1<br />
m2<br />
nodo<br />
m3<br />
δp4<br />
23<br />
A<br />
D<br />
.<br />
.<br />
δp1<br />
maglia<br />
Figura 3.1a Configurazione di un nodo Figura 3.1b Configurazione di un maglia chiusa<br />
N .<br />
∑ i<br />
i=<br />
1<br />
∑<br />
δp3<br />
B<br />
3.1)<br />
m = 0<br />
δ = 0 ⇒ δp<br />
− δp<br />
− δp<br />
+ δp<br />
= 0 3.2)<br />
pi 1 2 3 4<br />
δp2<br />
C
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Per la convenzione sui segni, se si assumono positive le portate entranti, quelle uscenti<br />
risulteranno negative. Questa relazione richiama la prima legge di Kirchoff ai nodi per un<br />
circuito elettrico. Nel caso di flusso incomprimibile, al posto della portata massica si può<br />
sostituire quella volumetrica.<br />
Per una interconnessione fra linee idrauliche che realizzano una maglia chiusa (figura 3.1b) si<br />
può applicare l’analoga equazione della seconda legge di Kirchoff per le maglie elettriche. In<br />
questo caso la caduta di tensione verrà sostituita dalla caduta di pressione lungo la linea.<br />
Un altro aspetto di cui bisogna tener conto quando si opera con i liquidi è la presenza della<br />
forza peso come contributo non trascurabile nelle equazione di equilibrio delle forze esterne<br />
applicate al componente. Inoltre la pressione idrostatica che è presente in un generico punto<br />
del fluido determina la stessa risultante in tutte le direzioni ed agisce perpendicolarmente alla<br />
superficie.<br />
3.2 Relazioni di perdita<br />
Con il termine di perdita si intende quella condizione di resistenza al flusso che si genera<br />
durante il movimento del fluido. Pertanto ad una resistenza idraulica si deve sempre associare<br />
una caduta di pressione totale. Tale fenomeno è particolarmente evidente negli elementi<br />
porosi e in tutti quei sistemi impiegati per la filtrazione dei liquidi.<br />
• Setti porosi<br />
Un fluido incomprimibile che attraversa un setto poroso soddisfa la legge di Darcy dedotta<br />
dai risultati delle osservazioni sperimentali su un flusso d'acqua che attraversa un letto<br />
filtrante di sabbia. Tale legge stabilisce:<br />
Q k dP<br />
= −<br />
3.3)<br />
A µ dl<br />
dove Q è la portata volumetrica di liquido attraverso la sezione complessiva del condotto di<br />
area A, µ è la viscosità del fluido e k è la permeabilità del mezzo poroso. Il termine dP/dl<br />
rappresenta il gradiente di pressione attraverso il setto nella direzione del flusso. In relazione<br />
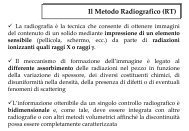
alla geometria del setto poroso rappresentato in figura 3.2, l'equazione 3.3) diviene:<br />
Q<br />
P1<br />
L<br />
24<br />
setto poroso<br />
Figura 3.2 Configurazione del setto poroso<br />
Q1− 2 k P2<br />
− P<br />
= − 1<br />
A µ L<br />
Pertanto la caduta di pressione attraverso il setto diventa:<br />
P2<br />
Q
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
µ L<br />
k A<br />
1 2 1−<br />
2 1−2<br />
=<br />
= − Q R Q<br />
P P<br />
f<br />
Il setto poroso è caratterizzato pertanto da una resistenza idraulica Rf costante che definisce<br />
questo elemento come componente statico e la relazione algebrica 3.4) che ne stabilisce il<br />
comportamento è analoga alla legge di Ohm valida per le resistenze elettriche.<br />
• Perdite concentrate<br />
Un altro elemento di perdita idraulica è costituito dalle perdite concentrate introdotte<br />
localmente dalla presenza di curve, valvole, variazioni brusche di sezione ecc. Pur essendo<br />
degli elementi completamente diversi fra loro, essi hanno la medesima caratteristica di<br />
introdurre una perdita di carico che viene valutata sperimentalmente. Poiché una perdita<br />
concentrata non comporta un apprezzabile accumulo di fluido e si estende per una lunghezza<br />
limitata, ne consegue che la presenza delle forze di massa e di superficie sono trascurabili.<br />
Tali componenti possono allora essere assimilati a componenti statici la cui equazione<br />
rappresentativa è simile all'equazione 1.2) introdotta per le valvole<br />
Q1-2 = K sign(P1-P2) (⏐P1-P2⏐) 1/α 3.5)<br />
dove α è definito sperimentalmente ed è prossimo a 2 mentre K è una quantità caratteristica<br />
dell'ostruzione e dipende dalla sezione di passaggio e dai dettagli costruttivi del componente.<br />
Da notare che l'equazione 3.5) è una relazione di tipo generale per valutare la perdita idraulica<br />
perché essa è applicabile anche al caso del setto poroso ponendo α=1. Occorre tuttavia<br />
sottolineare che tale relazione è non lineare e quindi è necessario linearizzarla nell'intorno del<br />
punto di funzionamento se si vuole svolgere un'analisi lineare.<br />
• Perdite distribuite<br />
Le perdite distribuite sono rilevanti nelle lunghe condotte. Se si ipotizza nulla la capacità di<br />
accumulo e si trascura la forza peso, i fattori che influenzano le perdite sono legate alla<br />
scabrezza della tubazione, alle sue dimensioni, alla velocità del flusso e alla viscosità del<br />
fluido. In particolare risulta determinante definire l'entità delle forze viscose rispetto a quelle<br />
inerziali, ovvero occorre conoscere il valore del numero di Reynolds definito come Re= ρ V<br />
Rh/µ con Rh raggio idraulico della condotta.<br />
Q1-2<br />
P1<br />
1<br />
d<br />
L<br />
Figura 3.3 Perdite distribuite in un condotto<br />
Quando Re>2000 il flusso è turbolento, mentre per valori inferiori esso è laminare. La<br />
resistenza offerta al passaggio del fluido in un condotto di elevata lunghezza, intesa come<br />
forza d'attrito è espressa dalla seguente relazione:<br />
Ff = B sign(V) ⏐V⏐ α<br />
25<br />
Ff<br />
2<br />
P2<br />
Q1-2<br />
3.4)<br />
⎧1<br />
flusso la min are<br />
α = ⎨<br />
3.6)<br />
⎩2<br />
flusso turbolento
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
B è una costante che dipende dalla geometria del condotto, dalle proprietà del fluido e dalla<br />
sua velocità media V=Q/A. Inoltre se si assume il flusso uniforme e unidirezionale, si può<br />
legare la forza d'attrito alla caduta di pressione, Ff=A(P1-P2) essendo A la sezione netta<br />
oppure si può far riferimento alla perdita di carico hL=(P1-P2)/(ρg).<br />
La formula di Darcy-Weisbach,, dedotta dalle rilevazioni sperimentali sui condotti a sezione<br />
circolare, stabilisce che hL= f L/d V 2 /(2g) dove f è il coefficiente d'attrito che dipende dal<br />
numero di Reynolds e dalla scabrezza del tubo e si ricava dal diagramma di Moody o dalle<br />
corrispondenti tabelle. Per un flusso laminare la perdita di carico è espressa dalla legge di<br />
Hagen-Poiseuille hL=32 µ L V/(ρ g d 2 ), pertanto il fattore d'attrito diventa: f = 64 µ / (ρVd)<br />
ovvero f = 64/Re.<br />
Poiché Ff = A(P1-P2) =B (Q/A) α e tendo conto delle definizioni precedenti si ottiene:<br />
ρ f L 2<br />
Ff = ρ g AhL<br />
= Q<br />
3.7)<br />
2Ad<br />
Nel caso di flusso turbolento ponendo α=2 si ha:<br />
Invece nel caso di flusso laminare per α=1 si ha:<br />
26<br />
2<br />
⎛ Q ⎞ ρ f L 2<br />
B⎜<br />
⎟ = Q<br />
⎝ A ⎠ 2Ad<br />
Q<br />
B<br />
A<br />
⇒<br />
ρ f L A<br />
B =<br />
2d<br />
32µ<br />
L Q 32µ<br />
L A<br />
= ρ g A ⇒ B =<br />
2 A<br />
2<br />
ρ g d<br />
d<br />
3.3 Induttanza o inertanza idraulica di una condotta<br />
Un segmento di condotta è considerato un elemento inerziale se la massa di fluido è<br />
sufficientemente rilevante da richiedere una forza significativa per accelerarla. Questo<br />
comportamento è tipico dei condotti lunghi per i quali, come visto, diventa importante anche<br />
la perdita di carico distribuita. La portata volumica del liquido è tuttavia costante in quanto si<br />
ritiene che non si possa realizzare un significativo accumulo di fluido.<br />
Q, C<br />
P1A<br />
1<br />
z1<br />
Mg<br />
Ff<br />
L<br />
2<br />
z2<br />
P2A<br />
Figura 3.4 Inertanza di una condotta a sezione costante<br />
Considerando lo schema di figura 3.4 si può applicare l'equazione di equilibrio delle forze<br />
esterne agenti sul volume di controllo, e considerando quindi la sua proiezione nella direzione<br />
del moto.<br />
ϑ<br />
Q, C
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
dC<br />
M gsinϑ<br />
+ p1A<br />
− p2<br />
A − F f = M<br />
3.8)<br />
dt<br />
Poiché M=ρAL e sinϑ=(z1-z2)/L si ottiene:<br />
L dQ<br />
p p F<br />
1 − 2 f<br />
= gz ( 1 − z2)<br />
+ −<br />
A dt<br />
ρ ρ A<br />
3.9)<br />
dove compare l’induttanza o inertanza della condotta I=L/A.<br />
3.4 Capacità idraulica<br />
La capacità idraulica è la caratteristica che contraddistingue tutti i componenti che sono in<br />
grado di realizzare considerevoli accumuli di massa.<br />
Q1<br />
h<br />
Figura 3.5 Serbatoio a pelo libero<br />
27<br />
Volume di<br />
controllo<br />
Il classico elemento idraulico con queste caratteristiche è rappresentato dal serbatoio a pelo<br />
libero di figura 3.5. Se si applica la relazione generale di conservazione della massa in regime<br />
non stazionario al volume di controllo che è stato scelto coincidente con il serbatoio<br />
medesimo, si ottiene:<br />
N .<br />
∑ mi<br />
=<br />
i=1<br />
dM<br />
dt<br />
Q2<br />
3.10)<br />
Nel caso rappresentato in figura 3.5 in cui è presente un solo ingresso e una sola uscita,<br />
l’equazione si semplifica notevolmente tenendo conto anche dell’incomprimibilità del fluido<br />
e dell’indeformabilità del serbatoio:<br />
m m A dh<br />
. .<br />
1− 2 =ρ 3.11)<br />
dt<br />
La quantità ρA=C rappresenta la capacità idraulica del serbatoio ed indica la massa di<br />
liquido necessaria per determinare la variazione unitaria della quota del pelo libero.<br />
Se invece si vuole tenere conto anche della comprimibilità del fluido e della deformabilità<br />
delle pareti, come ad esempio nel caso di un serbatoio in pressione, occorre:<br />
a) introdurre il coefficiente di comprimibilità del liquido:<br />
dρdp = 3.12)<br />
ρ β<br />
b) considerare l'elasticità dei materiali: un aumento della pressione del fluido determina il<br />
proporzionale incremento del volume iniziale V del serbatoio:<br />
dV dp<br />
=<br />
3.13)<br />
V K<br />
1
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Per analizzare il comportamento del sistema in queste condizioni è possibile introdurre le<br />
precedenti definizioni nella relazione generale della conservazione della massa secondo gli<br />
sviluppi matematici riportati nelle relazioni 3.14) e 3.15)<br />
dM dρ<br />
dV ⎛ 1 1 ⎞ dp<br />
= V + ρ = ρV<br />
dt dt dt<br />
⎜ +<br />
K<br />
⎟<br />
3.14)<br />
⎝ β 1 ⎠ dt<br />
Se il termine dentro parentesi viene interpretato come il coefficiente di comprimibilità<br />
equivalente del serbatoio in pressione (1/β+1/K1)=1/β’, allora nell’equazione 3.10) la<br />
derivata temporale della massa di liquido contenuta nel serbatoio diviene:<br />
dM M dp dp<br />
= = C<br />
3.15)<br />
dt '<br />
β dt dt<br />
dove C=M/β’ rappresenta la capacità equivalente del serbatoio in pressione. Nel caso di un<br />
serbatoio in pressione di diametro D e spessore s realizzato con un materiale avente modulo di<br />
elasticità E il coefficiente di elasticità del serbatoio si valuta come:<br />
Es<br />
K1<br />
= 3.16)<br />
D<br />
Per un serbatoio in acciaio E=200 GN/m 2 , mentre il coefficiente di comprimibilità dell’acqua<br />
è di 2 GN/m 2 pertanto il coefficiente di comprimibilità equivalente del serbatoio in pressione<br />
è, prossimo al coefficiente di comprimibilità del liquido.<br />
Inoltre confrontando la capacità idraulica per un recipiente in pressione con quella per un<br />
serbatoio a pelo libero, si evince che la prima risulta molto più piccola della seconda a parità<br />
di massa di liquido M contenuta nei serbatoi.<br />
3.5 I modelli matematici di alcuni impianti idraulici<br />
Il tempo di svuotamento di un serbatoio<br />
Si consideri il sistema di figura 3.6 composto da un serbatoio a pelo libero e da una valvola<br />
che ne regola l'efflusso. Per determinare il tempo di svuotamento del serbatoio occorre<br />
definire le relazioni caratteristiche di ciascun componente partendo sempre dalle equazione<br />
espresse nella forma generale non stazionaria.<br />
h 1 2<br />
Figura 3.6 Svuotamento di un serbatoio a pelo libero<br />
Per definire il comportamento non stazionario del serbatoio si è detto che si deve applicare<br />
l'equazione di conservazione della massa. Nel caso specifico essa assume la forma<br />
dell'equazione 3.17) che rappresenta pertanto l'equazione caratteristica del serbatoio, dove si è<br />
ancora una volta indicato con C la sua capacità idraulica.<br />
d<br />
dh dh<br />
− = ( ρ Ah)<br />
= ρA<br />
= C<br />
3.17)<br />
dt<br />
dt dt<br />
m .<br />
28<br />
m
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Per quanto riguarda il comportamento della valvola esso viene rappresentato da un'equazione<br />
algebrica avente la forma seguente:<br />
.<br />
m = K P − P<br />
3.18)<br />
1<br />
1<br />
2<br />
Da notare che il termine K1, che tiene conto sia delle perdita di carico attraverso la valvola sia<br />
della sezione di passaggio, viene per il momento considerato costante. Se ora si ipotizza che<br />
lo scarico avvenga in atmosfera, allora P2=0, e poiché P1=ρgh si ottiene l'equazione della<br />
valvola in funzione della quota h:<br />
.<br />
m 2 d<br />
= K h con K = ρ A C 2g<br />
3.19)<br />
Questa relazione è non lineare in h pertanto pone dei problemi nella determinazione della<br />
funzione di trasferimento del sistema con la metodologia classica valida per i sistemi lineari.<br />
Il problema si può superare effettuando la linearizzazione di tutte le relazioni non lineari che<br />
caratterizzano il comportamento del sistema. La validità del metodo lineare è però limitata a<br />
piccole oscillazioni attorno alla posizione di equilibrio. L'equazione linearizzata della valvola<br />
in funzione delle piccole variazioni δh e δm è la seguente:<br />
.<br />
δ h = Rδ<br />
m<br />
3.20)<br />
L'equazione del serbatoio in funzione delle piccole variazioni diventa:<br />
( h)<br />
− δ<br />
d<br />
= C<br />
dt<br />
3.21)<br />
Combinando le relazioni 3.20) e 3.21) si ottiene:<br />
m . δ<br />
( δ h)<br />
d<br />
−<br />
δ h<br />
=<br />
1<br />
RC<br />
dt<br />
29<br />
3.22)<br />
Integrando la 3.22) e assumendo come condizione iniziale quella che al tempo t=0 sia h=ho si<br />
ottiene:<br />
−<br />
t<br />
RC<br />
h = hoe<br />
3.23)<br />
La quantità RC=τ rappresenta la costante di tempo del sistema serbatoio-valvola e definisce il<br />
tempo di svuotamento del serbatoio nel caso di portata costante e caratteristica R della valvola<br />
indipendente da h. Infatti ricordando le definizioni di C ed R si ottiene:<br />
h M<br />
τ = RC = ρ A =<br />
3.24)<br />
. .<br />
m m<br />
Se invece si mantiene l'equazione generale non lineare della valvola si ottiene:<br />
− K<br />
dh<br />
h = C<br />
dt<br />
⇒<br />
dh K<br />
= − dt<br />
h C<br />
3.25)<br />
Integrando la 3.25) con la stessa condizione iniziale usata per l'equazione lineare si ottiene:
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
K<br />
. . 2<br />
K<br />
h = ho<br />
− t ⇒ m = mo<br />
− t<br />
3.26)<br />
2C<br />
2C<br />
Pertanto si osserva che il livello diminuisce parabolicamente al trascorrere del tempo mentre<br />
la portata diminuisce anch'essa ma linearmente. In tal caso il tempo di svuotamento si ricava<br />
imponendo h=0 nella 3.26) ottenendo:<br />
* 2C<br />
ho<br />
t = 3.27)<br />
K<br />
Il risultato ottenuto con l'analisi non lineare è sostanzialmente diverso da quello ottenuto<br />
precedentemente con l'analisi lineare che tuttavia mantiene la sua validità quando è necessario<br />
studiare il sistema di controllo del livello del serbatoio. In quel caso poiché si deve operare<br />
intorno al valore di set-point è pienamente giustificata l'analisi lineare.<br />
La regolazione di livello di un serbatoio a pelo libero<br />
Si vuole considerare l'impianto di figura 3.7 per analizzare il problema della regolazione di<br />
livello del serbatoio a pelo libero tramite una valvola in uscita. Le equazioni che<br />
caratterizzano il serbatoio e la valvola sono rispettivamente:<br />
. . dh dh<br />
m1<br />
− m2<br />
= ρ A = C<br />
3.28)<br />
dt dt<br />
.<br />
m2 1 2<br />
d 2<br />
= K P − P con K = C A 2ρ<br />
3.29)<br />
m1<br />
h 1 2<br />
Figura 3.7 Regolazione di livello di un serbatoio a pelo libero<br />
Poiché la valvola opera in modulazione, la portata in uscita m2 dipende non solo dalla<br />
differenza di pressione ma anche dalla sezione di passaggio A2 che varia durante la<br />
regolazione. In questa modalità di funzionamento è possibile operare la linearizzazione delle<br />
equazioni. Inoltre si tiene conto che p1-p2 = ρgh.<br />
.<br />
2<br />
m<br />
.<br />
.<br />
. . ⎛<br />
m<br />
⎞ ⎛<br />
m<br />
⎞<br />
2<br />
2<br />
f ( A , h)<br />
m m<br />
⎜ ∂<br />
2<br />
2 2<br />
δA<br />
⎜ ∂<br />
= ⇒ =<br />
⎛ ⎞ ⎟<br />
⎟<br />
⎜ ⎟ +<br />
⎜<br />
2 + δh<br />
⎝ ⎠o<br />
∂A<br />
⎟ ⎜<br />
2 ∂h<br />
⎟<br />
3.30)<br />
⎝ ⎠ ⎝ ⎠<br />
Le derivate parziali sono valutate nel punto di equilibrio attorno al quale avviene la<br />
regolazione di livello e possono essere determinate a partire dall'equazione della valvola.<br />
.<br />
.<br />
⎛<br />
m<br />
⎞ ⎛<br />
2 m<br />
⎞<br />
⎜ ∂ ⎟ ⎜ 2 ⎟<br />
⎜<br />
=<br />
∂A<br />
⎟ ⎜<br />
2 A ⎟<br />
2<br />
⎝ ⎠ ⎝ ⎠<br />
o<br />
o<br />
30<br />
o<br />
.<br />
⎛<br />
m<br />
⎞<br />
⎜ ∂ 2 ⎟<br />
⎜ ∂h<br />
⎟<br />
⎝ ⎠<br />
o<br />
A2<br />
.<br />
⎛<br />
m<br />
⎞<br />
2 =<br />
⎜ ⎟<br />
⎜ 2h<br />
⎟<br />
⎝ ⎠<br />
o<br />
o<br />
m2<br />
3.31)
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Tenendo conto della 3.31) la 3.30) diviene:<br />
. .<br />
. .<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⎜ ⎟ ⎜<br />
δA2<br />
δh<br />
m − ⎜ ⎟ = =<br />
+ ⎟<br />
2 . m2<br />
δ m2<br />
m2<br />
3.32)<br />
⎝ ⎠ ⎝ ⎠ ⎜ o o ⎟<br />
o<br />
o ⎝<br />
A 2 h<br />
2 ⎠<br />
La relazione 3.32) permette la rappresentazione grafica del diagramma di flusso della valvola<br />
che è riportata in figura 3.8.<br />
δA 2<br />
.<br />
o<br />
m2<br />
o<br />
A2<br />
+<br />
+<br />
31<br />
δm 2<br />
.<br />
o<br />
m2<br />
o<br />
2h<br />
Figura 3.8 Diagramma a blocchi della valvola<br />
E possibile definire la sezione di passaggio della valvola in funzione della posizione<br />
dell'otturatore con una relazione lineare anche nei casi in cui il loro legame sia non lineare, in<br />
seguito ad un’operazione di linearizzazione intorno alla posizione di equilibrio: δA2=Kv xv.<br />
Per quanto riguarda il diagramma di flusso del serbatoio esso può essere rappresentato in<br />
modo semplice dopo aver effettuato la trasformata di Laplace della 3.28) e aver ricavato la<br />
funzione di trasferimento:<br />
. .<br />
. .<br />
δ m1−<br />
δ m2<br />
δ m1−<br />
δ m2<br />
= ρ A sδh<br />
⇒ δh<br />
=<br />
3.33)<br />
ρ A s<br />
δm1<br />
+<br />
-<br />
δm2<br />
1<br />
ρ A<br />
Figura 3.9 Diagramma a blocchi del serbatoio<br />
Riunendo i due diagrammi a blocchi si ottiene il flusso di informazioni per l'intero sistema<br />
(figura 3.10) in cui δh è la variabile di uscita, δm1 è il disturbo, mentre xv è la variabile di<br />
controllo da determinare attraverso il sistema di controllo e da applicare mediante un attuatore<br />
composto da un servomotore e da un convertitore elettropneumatico (figura 3.11).<br />
δx v<br />
kv<br />
δA 2<br />
.<br />
o<br />
m2<br />
o<br />
A2<br />
+<br />
+<br />
Figura 3.10 Diagramma a blocchi del sistema completo serbatoio-valvola<br />
δm 2<br />
s<br />
δm 1<br />
-<br />
.<br />
o<br />
m2<br />
o<br />
2h<br />
δh<br />
+<br />
δh<br />
δh<br />
1<br />
ρ A<br />
s<br />
δh
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Riferendosi allo schema di figura 3.11 si nota che il regolatore effettua la correzione (ad<br />
esempio proporzionale), dell'errore esistente fra il valore di riferimento o set-point h o ed il<br />
valore attuale misurato dal trasduttore di livello. Il diagramma a blocchi corrispondente al<br />
sistema di regolazione riportato in figura 3.11, è rappresentato in figura 3.12.<br />
m1<br />
h 1 2<br />
misuratore di<br />
livello<br />
-<br />
h o<br />
set-point<br />
+<br />
32<br />
A2<br />
regolatore<br />
m2<br />
servomotore<br />
convertitore<br />
elettropneumatico<br />
Figura 3.11 Sistema di regolazione del livello di un serbatoio a pelo libero<br />
δxv<br />
Valvola<br />
kv<br />
GCM<br />
δA2<br />
.<br />
o<br />
m 2<br />
o<br />
A 2<br />
GR<br />
Convertitore Regolatore<br />
Servomotore h o<br />
+<br />
+<br />
δm2<br />
-<br />
+<br />
.<br />
o<br />
m2<br />
o<br />
2h<br />
δm1<br />
-<br />
GT<br />
+<br />
δh<br />
Trasduttore<br />
di livello<br />
Figura 3.12 Diagramma a blocchi del sistema di regolazione serbatoio-valvola<br />
La regolazione di livello di un serbatoio con pompa aspirante<br />
Nel caso in esame rappresentato in figura 3.13, la regolazione di livello avviene mediante una<br />
pompa aspirante ed il sistema di controllo interviene sulla velocità di rotazione della pompa<br />
per variare la portata elaborata m2.<br />
Rispetto al sistema di controllo precedente che prevedeva la regolazione sulla valvola in<br />
uscita, ora occorre definire il legame fra la variabile di controllo costituita dalla velocità<br />
angolare Ω della pompa e la variabile controllata h. Per tale ragione è necessario definire la<br />
caratteristica della pompa, intesa come relazione fra la portata m2 e la sua velocità angolare<br />
Ω. Si ipotizza che questa possa essere espressa da una relazione lineare del tipo m2=Kp Ω.<br />
Tale ipotesi è accettabile in quanto, operando in regolazione intorno al punto di equilibrio, è<br />
possibile ricorrere eventualmente alla linearizzazione di tutte le relazioni non lineari che<br />
descrivono il comportamento del sistema. Per una descrizione del comportamento del sistema<br />
più aderente alla realtà, occorre includere anche la natura dinamica del motore e della pompa.<br />
Infatti una loro caratterizzazione statica non tiene conto dei ritardi nella risposta susseguenti<br />
1<br />
ρ A<br />
s<br />
δh
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
ad una variazione dell’ingresso. Pertanto si può pensare di introdurre una o due costanti di<br />
tempo significative che definiscono un blocco di ritardo del motore GM.<br />
In figura 3.14 è riportato il corrispondente diagramma di flusso del sistema di regolazione con<br />
pompa aspirante rappresentato in figura 3.13.<br />
h o<br />
+<br />
h<br />
misuratore di<br />
livello<br />
m1<br />
-<br />
h o<br />
set-point<br />
m2<br />
+<br />
33<br />
pompa<br />
Ω<br />
regolatore<br />
motore<br />
Figura 3.13 Regolazione del livello del serbatoio con una pompa aspirante<br />
−<br />
Regolatore<br />
Ritardo<br />
motore<br />
Trasduttore<br />
di livello<br />
Pompa<br />
GR GM KP<br />
GT<br />
Ω<br />
−<br />
+<br />
Serbatoio<br />
1/ρAs<br />
Figura 3.14 Diagramma a blocchi del sistema di regolazione serbatoio-pompa aspirante<br />
Il modello matematico di due serbatoi collegati in serie<br />
Un sistema idraulico leggermente più complesso è quello rappresentato in figura 3.15 in cui<br />
due serbatoi sono collegati in serie da una lunga tubazione e le condizioni verso l’utilizzatore<br />
sono regolate da una valvola posta allo scarico del secondo serbatoio. Il sistema si compone<br />
pertanto di due serbatoi, di una valvola di regolazione e di una tubazione.<br />
h1<br />
1<br />
m0<br />
m1<br />
R1<br />
Figura 3.15 Impianto con due serbatoi collegati in serie<br />
2<br />
h2<br />
m2<br />
m1<br />
Rv<br />
xv<br />
m2<br />
h
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Per quanto riguarda il comportamento dinamico del sistema, tenendo conto della caratteristica<br />
capacitiva dei serbatoi e di quella resistiva della tubazione 1 e della valvola, è possibile<br />
assimilare l’impianto idraulico di figura 3.15 al circuito elettrico equivalente di figura 3.16<br />
applicando le regole dell’analogia elettrica ai sistemi idraulici. Le relazioni matematiche che<br />
definiscono il comportamento dei 4 componenti il circuito idraulico sono le seguenti:<br />
1. serbatoio 1 m m A dh<br />
.<br />
.<br />
1<br />
0− 1 =ρ 1<br />
3.34)<br />
dt<br />
2. serbatoio 2 m m A dh<br />
. .<br />
2<br />
1− 2 =ρ 2<br />
3.35)<br />
dt<br />
δAδhm δ<br />
3. valvola δ m m<br />
δ<br />
A h A A<br />
. . ⎛ ⎞<br />
v 2 2 h2<br />
2 = 2⎜<br />
+ ⎟ = v + 3.36)<br />
⎝ v 2 2 ⎠ v R2<br />
.<br />
4. tubazione δh − δh = Rδm 3.37)<br />
1 2 1 1<br />
Come si può notare le equazioni della valvola e della tubazione sono state riportate nella<br />
forma linearizzata facendo comparire le caratteristiche resistive dei componenti definite<br />
rispettivamente con R2 ed R1.<br />
ρA1<br />
R1<br />
m0 m1<br />
34<br />
ρA2<br />
.<br />
δAv2h o 2/A o v<br />
Figura 3.16 Schema elettrico equivalente all’impianto idraulico con due serbatoi posti in serie<br />
Proseguendo nell’analisi linearizzata ed operando la trasformata di Laplace delle equazioni<br />
differenziali si ottiene il seguente sistema di equazioni lineari:<br />
. .<br />
δ m0<br />
− δ m1<br />
= ρA1sδh1<br />
. .<br />
δ m1−<br />
δ m2<br />
= ρA<br />
sδh<br />
1<br />
2<br />
.<br />
o<br />
2<br />
o<br />
v<br />
. m δh2<br />
δ m2<br />
= δAv<br />
+<br />
A Rv<br />
.<br />
δh<br />
− δh<br />
= R δ m1<br />
1<br />
2<br />
2<br />
m2<br />
Rv<br />
3.38)<br />
Le equazioni linearizzate 3.38) del sistema possono essere rappresentate nel diagramma di<br />
flusso di figura 3.17. La sezione di passaggio della valvola viene variata agendo sulla<br />
posizione del suo otturatore alla quale è legata da una relazione lineare.<br />
Se si considera il contributo relativo alla sola inertanza della tubazione di lunghezza L e<br />
sezione costante At, allora secondo la relazione 3.9) si ha:<br />
1<br />
Nell’ipotesi di trascurare la caratteristica induttiva della tubazione e di considerare solo le perdite di carico<br />
distribuite lungo la linea.
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
p<br />
1<br />
.<br />
L d m1<br />
L d m1<br />
− p2<br />
= ⇒ h1<br />
− h2<br />
=<br />
3.39)<br />
A dt<br />
ρ gA dt<br />
t<br />
Tale contributo se sommato al termine di perdita considerato precedentemente fornirà<br />
complessivamente l’impedenza induttiva della tubazione.<br />
Ls .<br />
δh1 δh2<br />
R1<br />
δ m1<br />
ρ gA ⎟<br />
t<br />
⎟<br />
⎛ ⎞<br />
− = ⎜ +<br />
3.40)<br />
⎝ ⎠<br />
Il termine fra parentesi rappresenta proprio l'impedenza Zc della condotta e rappresenta<br />
pertanto un numero immaginario.<br />
δxv<br />
Valvola<br />
kv<br />
.<br />
L s<br />
δ h1<br />
− δh2<br />
= Z c δ m1<br />
⇒ Z c = R1<br />
+<br />
3.41)<br />
ρ gA<br />
δAv<br />
.<br />
o<br />
m2 o<br />
Av<br />
δm0<br />
+<br />
+<br />
+<br />
δm1<br />
δm2<br />
-<br />
Figura 3.17 Diagramma di flusso dell’impianto idraulico con due serbatoi collegati in serie<br />
Impianto idraulico con serbatoio - condotta forzata - valvola<br />
Un sistema che raggruppa i tre elementi idraulici aventi caratteristiche elastiche, inerziali e<br />
dissipative è rappresentato in figura 3.18. Il sistema di alimentazione mediante condotta<br />
forzata può essere studiato mediante l’analisi linearizzata facendo riferimento alle relazioni<br />
riportate precedentemente per i tre componenti.<br />
serbatoio m m A dH<br />
. .<br />
0− 1 =ρ 3.42)<br />
dt<br />
tubazione δhI − δhII = Zcδm1 3.43)<br />
valvola δm<br />
δ δ<br />
m A<br />
.<br />
2<br />
.<br />
o v hII<br />
= 2 + o<br />
A R<br />
3.44)<br />
v<br />
35<br />
1/Rv<br />
t<br />
δm1<br />
.<br />
-<br />
v<br />
+<br />
1<br />
ρ A1 1/R1<br />
s<br />
.<br />
δh2<br />
δh1<br />
+<br />
t<br />
1<br />
ρ A2 s<br />
-<br />
δh2
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
m0<br />
H<br />
m1<br />
zI<br />
I<br />
Figura 3.18 Impianto con serbatoio - condotta forzata - valvola<br />
Tenendo presente che il carico totale nella sezione I vale hI = zI + pI/(ρg) + CI 2 /2g = H e<br />
trasformando l’equazione differenziale del serbatoio con la trasformata di Laplace, si ottiene:<br />
.<br />
0<br />
.<br />
1<br />
δ m − δ m = ρ AsδH<br />
v<br />
o<br />
v<br />
.<br />
1<br />
δH<br />
− δhII<br />
= Zcδ<br />
m<br />
.<br />
δ m2<br />
.<br />
o δA<br />
= m2<br />
A<br />
δh<br />
+<br />
R<br />
36<br />
II<br />
v<br />
II<br />
Rv<br />
xv<br />
m2<br />
3.45)<br />
Combinando le equazioni e risolvendo rispetto alla variazione della quota δH del serbatoio si<br />
ottiene dopo alcuni passaggi la seguente espressione:<br />
.<br />
⎡ .<br />
o<br />
⎤<br />
Rv<br />
m2<br />
= ⎢ Z 2 δ m0<br />
δAv<br />
δ H<br />
− ⎥<br />
. o<br />
+ ⎢ o ⎥<br />
3.46)<br />
1 ρ A Z 2 s Rv<br />
Av<br />
⎣ m2<br />
⎦<br />
Dove con Z2=Rv+Zc si è indicata l’impedenza equivalente del sistema condotta-valvola.<br />
Il corrispondente diagramma di flusso di tale sistema viene schematizzato in figura 3.19.<br />
δm0<br />
+<br />
δm2<br />
-<br />
1/(ρAs)<br />
1/(Rv+Zc)<br />
+<br />
δH<br />
+<br />
m o 2 Rv/A o v<br />
Figura 3.19 Diagramma di flusso dell’impianto serbatoio-condotta-valvola<br />
Impianto idraulico con serbatoio - galleria - condotta forzata – valvola<br />
Il circuito idraulico di figura 3.20 ricorda il sistema di alimentazione di una centrale<br />
idroelettrica per la presenza di un bacino di raccolta, cha alimenta tramite la galleria e un<br />
pozzo piezometrico la condotta forzata il cui efflusso è regolata dalla valvola di regolazione.<br />
Adottando ancora l’analisi linearizzata le equazioni dei diversi componenti sono:<br />
δAv<br />
kv<br />
xv
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
serbatoio<br />
galleria δh − δh = Z δm<br />
vaso di espansione<br />
. . dh1<br />
m0<br />
− m1<br />
= ρA1<br />
3.47)<br />
dt<br />
1 2 g 1<br />
37<br />
.<br />
3.48<br />
. . dh2<br />
m1−<br />
m2<br />
= ρA2<br />
3.49)<br />
dt<br />
condotta forzata δhI − δhII = Zcδm2 3.50)<br />
valvola δm<br />
δ δ<br />
m A<br />
.<br />
2<br />
.<br />
o v hII<br />
= 2 + o<br />
A R<br />
3.51)<br />
m0<br />
h1<br />
m1<br />
Zg<br />
h2<br />
Figura 3.20 Impianto con serbatoio – galleria - condotta forzata - valvola<br />
Passando dal dominio del tempo a quello della variabile complessa s, si può ottenere<br />
facilmente il diagramma dell’informazione che viene rappresentato in figura 3.21<br />
xv<br />
δmo<br />
+<br />
δm1<br />
δm2<br />
-<br />
+<br />
-<br />
v<br />
I<br />
1/(ρA1s)<br />
1/Zg<br />
.<br />
1/(ρA2s)<br />
1/(Zc+Rv)<br />
δAv<br />
kv m o 2 Rv/A o v<br />
Figura 3.21 Diagramma di flusso dell’impianto serbatoio-galleria-<br />
vaso di espansione-condotta forzata-valvola di regolazione<br />
v<br />
ZC<br />
+<br />
-<br />
δh1<br />
δh2<br />
+<br />
+<br />
II<br />
Rv<br />
xv<br />
m2
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
3.6 Analisi lineare del comportamento dinamico di un impianto idroelettrico<br />
Come noto fra gli impianti di generazione dell’energia elettrica, quelli idroelettrici hanno il<br />
compito di soddisfare le richieste di punta dell’utenza attraverso la regolazione del carico<br />
elettrico.<br />
Per tutti gli impianti idroelettrici sia per quelli a bacino che ad acqua fluente, è possibile<br />
definire uno schema a blocchi di tipo generale come quello rappresentato in figura 3.22 che<br />
definisce il flusso delle informazioni presenti fra i vari sottosistemi. In esso sono rappresentati<br />
3 sistemi fondamentali corrispondenti al sistema idraulico, al distributore con la turbina e al<br />
servoposizionatore, in genere di tipo idraulico, che aziona il distributore.<br />
Dall'esame della figura 3.22 si può ricavare il legame fra l’uscita del regolatore (β) e la<br />
potenza meccanica netta Pm,, sapendo che β rappresenta l’angolo di rotazione dell’albero di<br />
regolazione che comanda il distributore della turbina attraverso un servoposizionatore di<br />
potenza adeguata.<br />
β<br />
Sistema di<br />
comando del<br />
distributore<br />
Sistema di<br />
comando dei<br />
tegoli<br />
A<br />
38<br />
H<br />
Sistema<br />
idraulico<br />
Distributore<br />
e<br />
Turbina<br />
Q<br />
Legge di<br />
parzializzazione<br />
Figura 3.22 Diagramma a blocchi di un impianto idroelettrico<br />
Dal punto di vista del controllo della potenza meccanica e della regolazione della frequenza<br />
risultano più interessanti gli impianti idroelettrici ad alta caduta con turbina Pelton. In questo<br />
caso il distributore è costituito da un ugello e dalla rispettiva spina Double comandata<br />
attraverso i servoposizionatori dall’albero di regolazione. Per un’analisi più completa<br />
occorrerebbe tener conto sia del comando dei tegoli deviatori (azionati direttamente<br />
dall’albero di regolazione per evitare i ritardi di risposta) sia della legge di parzializzazione<br />
della potenza meccanica nel caso in cui i tegoli intercettino i rispettivi getti (figura 3.23).<br />
Le condizioni di funzionamento dell’impianto dipendono ovviamente dai livelli dei bacini di<br />
alimento e di scarico, anche se si può ipotizzare che eventuali variazioni di quota risultino<br />
trascurabili con la portata 2 . Inoltre si indica con A l’apertura del distributore, intesa come<br />
sezione utile della vena fluida in arrivo alla ruota Pelton, con Q la portata volumetrica inviata<br />
dal distributore e con H l’energia specifica del fluido all’ingresso del distributore.<br />
La funzione di trasferimento del servoposizionatore, che stabilisce il legane fra la rotazione β<br />
dell'albero di regolazione e l’apertura A del distributore, può essere rappresentata dalla<br />
seguente relazione.<br />
β<br />
=<br />
K v<br />
Gv<br />
( s ) =<br />
1 + T s<br />
A v<br />
Pm<br />
Ω<br />
3.52)<br />
2 Si ipotizza che i bacini di alimentazione e di scarico possiedano una quota costante durante la fase di<br />
regolazione, ovvero che siano caratterizzati da una capacità infinita. Questa ipotesi di lavoro tuttavia non<br />
penalizza lo studio della regolazione dell’impianto idraulico perché le lievi variazioni che possono presentarsi<br />
nella realtà non sono tali da influenzarne significativamente il comportamento.
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Kv è il guadagno statico del servoposizionatore che dipende dalla caratteristica statica del<br />
servoposizionatore A(β) e varia con il punto di lavoro se essa è non lineare mentre Tv è la<br />
costante di tempo del servomeccanismo idraulico che può variare fra 0.1-0.3 s.<br />
Una caratteristica statica non lineare del servoposizionatore potrebbe essere appositamente<br />
prescritta in modo da presentare una bassa sensibilità nella condizione di funzionamento a<br />
vuoto. Inoltre la legge di variazione di A con β potrebbe presentare una insensibilità non<br />
trascurabile con valori pari a 0.2-0.5% del valore di massima apertura.<br />
Figura 3.23 Schema del distributore regolatore della portata di una turbina Pelton<br />
Turbina-distributore<br />
Dal diagramma a blocchi di figura 3.22 si può osservare che le uscite del blocco turbina –<br />
distributore, ovvero la potenza meccanica Pm e la portata volumetrica Q, sono dipendenti dai<br />
valori che assumono gli ingressi, ossia la velocità angolare Ω, il salto netto H e la sezione di<br />
passaggio del distributore A. Ipotizzando che tale legame possa essere espresso mediante<br />
delle relazioni di tipo algebrico e quindi senza alcun ritardo dinamico, si potrà in generale<br />
scrivere che Pm = f(Ω, A, H) e Q=f((Ω, A, H). Inoltre nel caso di piccole variazioni delle<br />
grandezze in ingresso rispetto al punto di equilibrio anche le grandezze in uscita subiranno<br />
delle piccole variazioni esprimibili con le seguenti relazioni:<br />
δP<br />
P<br />
m<br />
o<br />
m<br />
= K<br />
δQ<br />
= K<br />
o<br />
Q<br />
PA<br />
QA<br />
δA<br />
+ K<br />
o<br />
A<br />
δA<br />
+ K<br />
o<br />
A<br />
PΩ<br />
QΩ<br />
δΩ<br />
+ K<br />
o<br />
Ω<br />
δΩ<br />
+ K<br />
o<br />
Ω<br />
39<br />
PH<br />
QH<br />
δH<br />
H<br />
H<br />
o<br />
o<br />
δH<br />
3.53)<br />
Inoltre poiché la potenza meccanica è espressa come Pm=η ρ g H Q, espandendo tale<br />
relazione in serie di Taylor e trascurando i termini di ordine superiore al primo e<br />
considerando η, ρ e g costanti, si ottiene:
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
dove:<br />
o<br />
o<br />
o ⎛ ∂P<br />
P<br />
P P m ⎞ ⎛ ∂<br />
Q m ⎞<br />
m = m + ⎜ ⎟ δ + + ⎜ ⎟ δH<br />
+ H . O.<br />
T .<br />
3.54)<br />
⎝ ∂Q<br />
⎠H<br />
⎝ ∂H<br />
⎠Q<br />
o<br />
⎛ ∂Pm<br />
⎞<br />
⎜ ⎟ = ρη g H<br />
⎝ ∂Q<br />
⎠<br />
H<br />
o m<br />
40<br />
o<br />
⎛ ∂P<br />
⎞<br />
o<br />
⎜ ⎟ = ρη g Q<br />
3.55)<br />
⎝ ∂H<br />
⎠<br />
Sostituendo le 3.55) nella 3.54) e riordinando si ottiene:<br />
δPm δQ δH<br />
≈ + 3.56)<br />
o o o<br />
P Q H<br />
m<br />
Nel caso di una turbina Pelton tutta l’energia specifica H presente a monte del distributore si<br />
trasforma integralmente in energia cinetica se si trascura l’energia potenziale del getto e<br />
quella di pressione perché riferita alle condizioni atmosferiche. In tal caso la portata<br />
volumetrica attraverso il distributore si può esprimere come:<br />
Q<br />
Q= AC1= A 2 gH<br />
3.57)<br />
Questa relazione, che definisce un legame non lineare fra la portata volumetrica Q e l’energia<br />
specifica H disponibile per il distributore, può essere linearizzata utilizzando il medesimo<br />
procedimento applicato precedentemente per l’espressione della potenza.<br />
dove:<br />
o<br />
o Q Q<br />
Q= Q + A H H O T<br />
A H<br />
⎛ ⎞<br />
⎜ ⎟ +<br />
⎝ ⎠<br />
⎛ ∂ ∂ ⎞<br />
δ ⎜ ⎟ δ + . . . 3.58)<br />
∂ ⎝ ∂ ⎠<br />
o<br />
⎛ ∂Q⎞<br />
o Q<br />
⎜ ⎟ = 2gH<br />
=<br />
⎝ ∂A⎠<br />
A<br />
H<br />
H<br />
o<br />
o<br />
o<br />
A<br />
o o<br />
⎛ ∂Q<br />
⎞ 2gA<br />
⎜ ⎟ = =<br />
⎝ ∂H<br />
⎠<br />
o<br />
A 2 2gH<br />
1<br />
2<br />
Q<br />
H<br />
o<br />
o<br />
3.59)<br />
Sostituendo le 3.59) nella 3.58) e trascurando i termini di ordine superiore al primo si ottiene:<br />
δQ δA δH<br />
≈ +<br />
Q A 2H<br />
o o o<br />
⎧K<br />
⎪<br />
Confrontando la seconda delle 3.53) con la 3.60) si osserva che ⎨K<br />
⎪<br />
⎩<br />
K<br />
sostituendo la 3.60) nella 3.56) si ottiene:<br />
δPm δA δH<br />
= + o o o<br />
P A H<br />
3<br />
2<br />
Pertanto confrontando la 3.61) con la seconda della 3.53) si osserva che:<br />
m<br />
⎧K<br />
⎪<br />
⎨K<br />
⎪<br />
⎩K<br />
PA<br />
PΩ<br />
PH<br />
QA<br />
QΩ<br />
QH<br />
3.60)<br />
= 1<br />
= 0 Inoltre<br />
= 1/ 2<br />
= 1<br />
= 0<br />
= 3/ 2<br />
3.61)
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Sistema idraulico<br />
Per quanto concerne il sistema idraulico la figura 3.22 mette in evidenza un legame tra le due<br />
variabili: la portata Q e l'energia specifica H. Tale relazione che evidenzia il comportamento<br />
dinamico del sistema, può essere espressa introducendo il concetto di impedenza complessiva<br />
Zw del sistema idraulico:<br />
δ H = ZW<br />
( s ) δQ<br />
3.62)<br />
Esprimendo la 3.62) in funzione delle variazioni relative delle grandezze coinvolte si ottiene:<br />
e sostituendo nella 3.60 si ottiene:<br />
0<br />
δH<br />
Q δQ<br />
= Z<br />
o o W ( s )<br />
o<br />
H H Q<br />
⎛<br />
⎞<br />
⎜<br />
⎟<br />
0<br />
δQ<br />
δA<br />
1 Q δQ<br />
δQ<br />
⎜ 1 ⎟ δA<br />
= + Z<br />
o o o W ( s ) ⇒ =<br />
o o ⎜<br />
o ⎟ o<br />
Q A 2 H Q Q<br />
⎜<br />
ZW<br />
Q<br />
⎟<br />
A<br />
⎜1<br />
−<br />
o ⎟<br />
⎝ 2 H ⎠<br />
quest'ultima se viene sostituita nella 3.63 porge:<br />
⎛ ⎞<br />
o<br />
δHZ Q<br />
⎜<br />
W 1<br />
⎟<br />
δA<br />
= ⎜ ⎟<br />
o o<br />
o o<br />
H H ⎜ ZW Q ⎟ A<br />
⎜ 1 − ⎟<br />
⎝<br />
o<br />
2 H ⎠<br />
41<br />
3.63)<br />
3.64)<br />
3.65)<br />
Sostituendo infine la relazione 3.65) nella 3.61) si può ottenere la funzione di trasferimento<br />
Ga(s) del sistema complessivo turbina e sistema adduttore:<br />
Z<br />
δP δAZ Q<br />
δAδ P A H Z Q A<br />
H<br />
Q<br />
o<br />
⎛ ⎞ ⎛ ⎞<br />
o ⎜ ⎟ ⎜ 1 +<br />
m 3 W 1<br />
W o ⎟<br />
H A<br />
= + ⎜ ⎟ = ⎜ ⎟<br />
o o<br />
o<br />
o o<br />
o o<br />
m 2 ⎜ W ⎟ ⎜ ZW Q ⎟ A<br />
⎜ 1 − ⎟ ⎜ 1 − ⎟<br />
⎝<br />
o ⎠ ⎝<br />
o<br />
2<br />
2 H ⎠<br />
Z<br />
P P<br />
G s<br />
A A<br />
Q ⎛<br />
o ⎜ 1 +<br />
δ<br />
W<br />
m m H<br />
a(<br />
)= = ⎜<br />
o<br />
δ ⎜ ZW Q<br />
⎜ 1 −<br />
⎝ 2 H<br />
o<br />
o<br />
o<br />
o<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
3.66)<br />
3.67)<br />
L’espressione dell’impedenza equivalente del sistema idraulico Zw, si determina seguendo il<br />
procedimento utilizzato nello studio dei diversi componenti idraulici esaminati. Nel caso<br />
specifico dell’impianto idroelettrico con turbina Pelton, si considera, per semplicità e per<br />
separare i diversi contributi, che il sistema idraulico sia composto dalla sola condotta forzata<br />
alimentata da un serbatoio con livello costante. Si trascurano inoltre le perdite di carico in<br />
condotta e si assume il fluido incomprimibile e le pareti della condotta indeformabili. In tal<br />
caso l’equazione caratteristica della condotta forzata risulta:
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
H H I dQ<br />
Lc<br />
v − = c Ic<br />
= 3.68)<br />
dt<br />
gA<br />
dove si è indicato con Hv il valore del carico totale all’ingresso della condotta forzata<br />
supposto costante e con H quello alla sua uscita mentre Ic rappresenta l’inertanza idraulica<br />
della condotta e Q la portata che l’attraversa.<br />
In condizioni di funzionamento stazionarie risulta evidentemente Hv=H o . Pertanto esprimendo<br />
la 3.68) in funzione delle piccole variazioni e effettuando la trasformata di Laplace si ottiene:<br />
H H I dQ<br />
o δ<br />
− = c<br />
dt<br />
⇒ − δH = Icsδ Q<br />
3.69)<br />
che quest'ultima relazione viene confrontata con la 3.62) si ottiene che l'impedenza Zw = -Ic s.<br />
Sostituendo la 3.69) nella 3.67) si ottiene la seguente forma generale della funzione di<br />
trasferimento:<br />
1 − W s<br />
Ga( s)= Ka<br />
1 + W s<br />
1<br />
τ<br />
τ<br />
2<br />
3.70)<br />
con K<br />
a<br />
P<br />
I<br />
A<br />
Q<br />
o<br />
o<br />
m = τ o W = c rappresentano rispettivamente il guadagno statico e il tempo di<br />
o<br />
H<br />
avviamento della condotta.<br />
Si può notare infatti che essendo la potenza proporzionale al prodotto QH e la portata per la<br />
3.57) dipendente dalla sezione A e dalla radice quadrata di H, si può concludere che in<br />
definitiva Pm è proporzionale ad AH 3/2 . Pertanto con le ipotesi fatte (H ed η costanti) il<br />
guadagno statico risulta costante ed indipendente anche dal punto di lavoro. In realtà se al<br />
variare del punto di lavoro il rendimento subisse delle variazioni considerevoli allora anche<br />
Ka dovrebbe variare.<br />
Il tempo di avviamento della condotta τW risulta, per H=cost., direttamente proporzionale alla<br />
portata volumetrica Q. Pertanto, definite le condizioni di funzionamento nominali, per gli altri<br />
punti di lavoro il tempo di avviamento sarà dato da:<br />
o<br />
Q<br />
τW= τ<br />
Q<br />
( )<br />
o<br />
n om<br />
W n om<br />
42<br />
c<br />
3.71)<br />
Per gli impianti idroelettrici con turbina Pelton il tempo di avviamento della condotta, in<br />
condizioni operative nominali, può variare tra 0.5-1.5 secondi. Si può inoltre notare che<br />
poiché<br />
τ<br />
W<br />
o<br />
ρLA<br />
o<br />
c c<br />
Q Lc<br />
c<br />
o<br />
o o<br />
H gA ρ<br />
Q ⎛ ⎞<br />
⎜ ⎟<br />
⎝ A ⎠<br />
= =<br />
gH Q<br />
c<br />
2<br />
3.72)<br />
esso rappresenta il rapporto fra il doppio dell’energia cinetica della massa d’acqua contenuta<br />
nella condotta che assume la velocità Q o /A o e la potenza del getto. In definitiva τW<br />
rappresenta il tempo che impiega la massa d’acqua a percorrere la condotta in assenza di<br />
attriti.
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Si può allora studiare il comportamento della funzione di trasferimento del sistema Ga(s) nel<br />
dominio della frequenza, fornendone una rappresentazione grafica attraverso il diagramma di<br />
Bode di figura 3.24), per due differenti valori del tempo di avviamento della condotta τW.<br />
15<br />
Gain dB<br />
10<br />
5<br />
0<br />
-90<br />
-180<br />
10 -1<br />
0<br />
Phase deg<br />
10 -1<br />
τW=1 s<br />
10 0<br />
10 0<br />
Frequency (rad/sec)<br />
Frequency (rad/sec)<br />
43<br />
10 1<br />
10 1<br />
Figura 3.24 Diagramma di Bode della f.d.t. Ga(s)<br />
τW=0.5 s<br />
Il comportamento del sistema può però essere influenzato da alcuni fattori che in questa<br />
analisi preliminare sono stati trascurati. Infatti si può esaminare l’influenza sulla funzione di<br />
trasferimento determinati da:<br />
• perdite di carico per attrito nella condotta forzata<br />
• elasticità delle pareti della condotta e del fluido (comprimibilità)<br />
• presenza della galleria in pressione e del pozzo piezometrico<br />
Influenza delle perdite di carico<br />
Per tener conto delle perdite di carico nella condotta occorre modificare la relazione 3.68)<br />
aggiungendo il termine di perdita che, nel caso di flusso turbolento, ha la forma RcQ 2 .<br />
H H I dQ 2<br />
v − = c + RQ c<br />
3.73)<br />
dt<br />
Il termine non lineare introdotto richiede l'applicazione del processo di linearizzazione ed<br />
esprimendo la 3.73) in funzione delle piccole variazioni si ottiene:<br />
o ( c c )<br />
H H I dQ<br />
o δ<br />
o<br />
− = c + 2RQ c δQ⇒ − δH= 2 RQ + IsδQ3.74) dt<br />
In questo caso l’impedenza equivalente della condotta risulta: Zw = -(2RcQ o +Ic s).<br />
L’equazione 3.70), che rappresenta la funzione di trasferimento del sistema, mantiene la<br />
stessa struttura in cui al termine τw s si sostituisce la quantità (2RcQ o2 /H o +τw s). L’entità delle<br />
perdite di carico in corrispondenza delle condizioni di funzionamento nominale è in genere<br />
pari a pochi punti percentuali, pertanto gli effetti sulla funzione di trasferimento possono<br />
ritenersi trascurabili.<br />
10 2<br />
10 2
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Influenza dell’elasticità della condotta<br />
Per tener conto dell’elasticità della condotta e della comprimibilità del fluido, occorre<br />
effettuare una discretizzazione del sistema e costruire un modello a parametri distribuiti.<br />
Infatti nella modellazione a parametri concentrati, l’ipotesi di fluido incomprimibile e sezione<br />
costante della condotta ha permesso di trattare il sistema nella sua globalità come un elemento<br />
caratterizzato in ogni punto dai medesimi valori delle proprietà termofluidodinamiche. Nel<br />
caso di una modellazione a parametri distribuiti invece le equazioni generali devono essere<br />
applicate tenendo conto che le diverse grandezze fisiche sono funzione non solo del tempo t<br />
ma anche della posizione x lungo la condotta.<br />
Con riferimento alla figura 3.25 le equazioni di conservazione verranno applicate ad un<br />
elemento di condotta di lunghezza infinitesima dx.<br />
h<br />
p/ρg<br />
z<br />
z=0<br />
x<br />
44<br />
x+dx<br />
Figura 3.25 Schema a parametri distribuiti della condotta forzata<br />
L’equazione di conservazione della massa applicata all’elemento di lunghezza dx diviene:<br />
⎡ qxt ( , ) ⎤<br />
qxt ( , ) − qxt ( , ) + dx<br />
⎣<br />
⎢<br />
x ⎦<br />
⎥ =<br />
∂<br />
∂<br />
∂<br />
Ac<br />
( Adx)<br />
c<br />
∂t<br />
3.75)<br />
Se si tiene conto dell’elasticità della condotta, dopo aver semplificato l’espressione, si ottiene:<br />
∂qxt<br />
( , ) ∂A<br />
− =<br />
∂x<br />
∂t<br />
c<br />
3.76)<br />
In un impianto ad alta caduta il carico totale h(x,t) è pari alla quota piezometrica se il<br />
contributo cinetico è trascurabile, pertanto h(x,t) = z + p(x,t)/ρg. La sua dipendenza dal tempo<br />
può essere espressa con la seguente relazione:<br />
⎛ p(<br />
x,<br />
t ) ⎞<br />
∂ ⎜ ⎟<br />
∂h(<br />
x,<br />
t ) ρg<br />
=<br />
⎝ ⎠<br />
3.77)<br />
∂t<br />
∂t<br />
Moltiplicando e dividendo il secondo membro della 3.76) per la 3.77) si ottiene:
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
( gA )<br />
∂qxt<br />
∂ρ ∂hxt<br />
∂<br />
− = = C<br />
∂x<br />
∂p<br />
∂t<br />
∂<br />
hxt<br />
( , ) c ( , ) ( , )<br />
c<br />
3.78)<br />
t<br />
La costante Cc rappresenta la capacità equivalente della condotta e contiene il contributo<br />
derivante dall’elasticità della condotta e dalla comprimibilità del fluido.<br />
∂<br />
( ρ )<br />
∂p<br />
∂ρ ∂A<br />
= gAc<br />
+ ρ g<br />
3.79)<br />
∂p<br />
∂p<br />
gAc c<br />
Se ora si applica l’equazione di conservazione della quantità di moto, nella forma semplificata<br />
espressa dalla 3.68), all’elemento di condotta di lunghezza dx si ottiene:<br />
⎡ hxt ( , ) ⎤ dx qxt ( , )<br />
hxt ( , ) − hxt ( , ) + dx<br />
⎣<br />
⎢<br />
x ⎦<br />
⎥ gAc<br />
t<br />
=<br />
∂<br />
∂<br />
∂<br />
∂<br />
Semplificando i termini della 3.80) si ottiene la seguente espressione finale:<br />
∂hxt<br />
( , ) 1 ∂qxt<br />
( , )<br />
− =<br />
∂x<br />
gA ∂t<br />
c<br />
45<br />
3.80)<br />
3.81)<br />
Le due equazioni differenziali alla derivate parziali 3.78) e 3.81) definiscono completamente<br />
il comportamento non stazionario della condotta forzata che è pertanto caratterizzata da una<br />
induttanza 1/(gAc) e da una capacità Cc. Il sistema di equazioni, dopo aver applicato la<br />
trasformata di Laplace, diviene:<br />
⎧ ∂Q(<br />
x, s)<br />
⎪<br />
− = CsH c ( xs , )<br />
⎪ ∂x<br />
⎨<br />
∂H(<br />
x, s)<br />
s<br />
⎪−<br />
= Q( x, s)<br />
⎩⎪<br />
∂x<br />
gAc Derivando rispetto a x la prima delle 3.82) si ottiene:<br />
∂H(<br />
x, s)<br />
∂ Q( x, s)<br />
=−<br />
∂x<br />
C s ∂x<br />
1<br />
2<br />
e sostituendo nella seconda delle 3.82) si ha:<br />
∂<br />
2<br />
c<br />
3.82)<br />
2 3.83)<br />
2<br />
Q( x, s)<br />
Cs c − Q( x, s)<br />
= 0<br />
2<br />
3.84)<br />
∂x<br />
gA<br />
La 3.84) costituisce la ben nota equazione delle onde elastiche la cui soluzione risulta:<br />
Q(<br />
x,<br />
s )<br />
H(<br />
x,<br />
s )<br />
c<br />
−λx<br />
λx<br />
= A1e<br />
+ A2e<br />
=<br />
1<br />
gAcCc<br />
λ =<br />
Cc<br />
s<br />
gAc<br />
−λx<br />
λx<br />
( A e − A e )<br />
1<br />
2<br />
3.85)
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
La determinazione delle costanti di integrazione si ottiene ponendo le seguenti condizioni al<br />
contorno: H(x=0,s)=Hv e Q(x=Lc,s)=Q(s). L’espressione del carico totale presente alla base<br />
della condotta ovvero per x=Lc è pari a:<br />
Hv( s)<br />
H( s)<br />
= −Zoc<br />
tanh( ϑ c ) Q( s)<br />
cosh( ϑ )<br />
c<br />
Cc<br />
1<br />
ϑc = sLc<br />
Zoc<br />
= Zw = Zoc<br />
tanh( ϑc<br />
)<br />
gA<br />
gA C<br />
c<br />
46<br />
c c<br />
3.86)<br />
La quantità Zw rappresenta l’impedenza complessa della condotta e insieme alle altre<br />
relazioni 3.86) consente di mettere in evidenza i fenomeni di propagazione delle perturbazioni<br />
di pressione in condotta che avvengono alla velocità ac.<br />
a<br />
c<br />
gAc<br />
= 3.87)<br />
C<br />
Sostituendo l’espressione così ottenuta per l’impedenza complessa Zw nella funzione di<br />
trasferimento del sistema espressa dalla relazione 3.67) si trova:<br />
c<br />
o ⎛ Q a ⎛ sL ⎞ ⎞<br />
c<br />
c<br />
⎜ 1 + tanh<br />
o<br />
o ⎜ ⎟ ⎟<br />
δP<br />
P H gA a<br />
m m ⎜<br />
c ⎝ c ⎠ ⎟<br />
Ga( s)<br />
= = o<br />
o<br />
δA<br />
A ⎜<br />
Q ac<br />
⎛ sLc<br />
⎞ ⎟<br />
⎜ 1 − tanh<br />
o ⎜ ⎟ ⎟<br />
⎝ H gA ⎝ a ⎠<br />
⎟<br />
⎠<br />
1<br />
2<br />
c<br />
c<br />
3.88)<br />
La relazione 3.88) sostituisce la 3.67) e definisce pertanto la funzione di trasferimento del<br />
sistema condotta - turbina con l’introduzione dell’elasticità della condotta.<br />
6<br />
Gain dB<br />
4<br />
2<br />
0<br />
10 -1<br />
0<br />
Phase deg.<br />
-500<br />
-1000<br />
-1500<br />
10 -1<br />
10 0<br />
frequency [rad/s]<br />
10 0<br />
frequency [rad/s]<br />
Figura 3.25 Diagramma di Bode della f.d.t. Ga(s) in presenza dell’elasticità della condotta<br />
ω<br />
r<br />
10 1<br />
10 1
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
L'andamento oscillante della funzione di trasferimento dipende dal valore assunto dalla<br />
funzione trascendente il cui argomento ha periodo pari a π/2. Per ωLc/ac =π/2 la tanh diviene<br />
infinita e il modulo della funzione di trasferimento diventa pari al doppio del guadagno statico<br />
mentre quando ωLc/ac = π la tanh è pari a zero e il modulo della funzione di trasferimento è<br />
uguale al guadagno statico.<br />
La presenza delle perdite di carico non modifica sostanzialmente l'andamento della funzione<br />
di trasferimento anche se possono aversi piccole variazioni del guadagno statico. Occorre<br />
inoltre notare che la quantità 2Lc/ac rappresenta il tempo necessario alla generica<br />
perturbazione di pressione per percorre nei due sensi l'intera condotta. Tale tempo τe è<br />
denominato durata di fase e assume valori compresi fra 0.3 e 3 s. Per evitare eccessive<br />
variazioni di pressione in condotta occorre, in base alla teoria del colpo d'ariete, che i tempi di<br />
completa chiusura o apertura del distributore siano sufficientemente superiori a τe.<br />
Un altro parametro caratteristico è rappresentato dal parametro dell'Allievi:<br />
τ<br />
Q<br />
a<br />
o<br />
o<br />
ρ all<br />
w<br />
c<br />
c<br />
= = I o c = o<br />
τ e H 2Lc<br />
2H<br />
gAc<br />
3.89)<br />
Il valore di questo parametro permette di definire il tipo di transitorio che si viene a realizzare<br />
in seguito ad una variazione a gradino dell'apertura del distributore δA. Se ρall1 allora il transitorio è di tipo aperiodico<br />
Effetti della galleria e del pozzo piezometrico<br />
La galleria in pressione e il pozzo piezometrico producono degli effetti generalmente modesti<br />
e limitati al campo delle basse frequenze (ω≈0.1 Hz) con scarse conseguenze sulla funzione di<br />
trasferimento. Si può però intuire che con i normali valori della sezione del pozzo, il carico<br />
piezometrico all'imbocco della condotta può subire variazioni relativamente lente, mentre le<br />
variazioni rapide risulteranno di ridotta entità. Le oscillazioni lente del carico possono non<br />
essere trascurabili benché caratterizzate da periodi compresi fra 150 - 250 s. Occorre inoltre<br />
verificare che durante le manovre di regolazione o di disservizio temporaneo del regolatore<br />
non si verifichino oscillazioni eccessive da causare lo svuotamento del pozzo con gravi danni<br />
per l'impianto in seguito all'immissione di aria in galleria e in condotta.<br />
Negli impianti ad alta caduta la sezione del pozzo non deve essere troppo ridotta perché può<br />
provocare effetti rilevanti sulla funzione di trasferimento del sistema e addirittura<br />
pregiudicare la stabilità della regolazione.<br />
Se si trascurano l'elasticità della condotta forzata e della galleria, anche in considerazione<br />
delle frequenze relative basse che caratterizzano i fenomeni che li coinvolgono, è possibile<br />
stabilire un criterio per determinare il minimo valore della sezione del vaso di espansione che<br />
garantisce la stabilità del sistema. Infatti tenendo conto delle impedenze dei vari componenti<br />
si ha:<br />
− z<br />
c<br />
− z<br />
− z<br />
g<br />
p<br />
= I s + 2R<br />
Q<br />
c<br />
= I s + 2R<br />
Q<br />
g<br />
1<br />
=<br />
A s<br />
v<br />
c<br />
g<br />
0<br />
0<br />
47<br />
Q<br />
a<br />
condotta<br />
galleria<br />
forzata<br />
vaso di espansione<br />
3.90)<br />
Inoltre le tre impedenze possono essere assimilate ad una unica impedenza complessiva<br />
tenendo conto della loro reciproca disposizione secondo il circuito elettrico equivalente di
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
figura 3.26. Le impedenze della galleria e del pozzo piezometrico sono in parallelo mentre<br />
quella della galleria si presenta in serie rispetto all'impedenza somma delle precedenti.<br />
Pertanto tenendo conto delle regole dei circuiti elettrici che permettono di effettuare la somma<br />
di impedenze in serie ed in parallelo si ottiene l'impedenza complessiva Zw:<br />
z<br />
z<br />
z<br />
+ z<br />
z<br />
c g c p p g<br />
w = 3.91)<br />
z p + zg<br />
Zg<br />
Zp<br />
Figura 3.26 Circuito elettrico equivalente delle impedenze dell’impianto idroelettrico<br />
Inoltre se si trascura l'impedenza della condotta forzata rispetto a quella della galleria e si<br />
sostituisce nella 3.91 le espressioni delle impedenze riportaste nelle 3.90 si ottiene:<br />
z<br />
w<br />
48<br />
+ z<br />
z<br />
0<br />
z pz<br />
g I gs<br />
+ 2RgQ<br />
= = −<br />
3.92)<br />
z + z 1+<br />
A s<br />
p<br />
g<br />
v<br />
Zc<br />
( I s + 2R<br />
Q)<br />
Se ora si sostituisce tale espressione dell'impedenza equivalente nella relazione 3.67<br />
esprimente la funzione di trasferimento del sistema idraulico, si possono determinare sia gli<br />
zeri che i poli di tale funzione. Come noto ai fini della stabilità del sistema a ciclo chiuso sono<br />
d'interesse solo gli zeri della funzione di trasferimento a ciclo aperto in quanto essi ne<br />
rappresentano i poli della corrispondente funzione di trasferimento a ciclo chiuso. Pertanto<br />
solo essi devono essere considerati ai fini dell'analisi della stabilità del sistema. Infatti un<br />
sistema a ciclo chiuso è stabile se e solo se gli zeri della funzione di trasferimento a ciclo<br />
aperto presentano parte reale negativa.<br />
Tale condizione comporta che siano verificate le seguenti relazioni:<br />
H<br />
0<br />
≥ 2R<br />
g<br />
g<br />
I g<br />
Av<br />
≥<br />
2R<br />
H<br />
g<br />
0 ( Q )<br />
0<br />
2<br />
g<br />
3.93)<br />
Mentre la prima relazione della 3.93 può senz'altro considerarsi verificata soprattutto nel caso<br />
di impianti ad alta caduta, la seconda stabilisce la condizione di Thoma per la stabilità del<br />
sistema 3 . Questa relazione stabilisce la dimensione minima che deve assumere il pozzo<br />
piezometrico o vaso di espansione per garantire la stabilità del sistema.<br />
3 La prima relazione dell'equazione 3.93 deriva dall'imporre che la frequenza naturale del sistema abbia<br />
significato fisico ovvero risulti reale e positiva, mentre la condizione di Thoma scaturisce dall'imporre per la<br />
stabilità del sistema un valore positivo per il coefficiente di smorzamento di un sistema del secondo ordine.
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
3.7 La regolazione delle centrali idroelettriche<br />
Le utenze connesse ad una rete elettrica richiedono, com’è noto, che frequenza e tensione<br />
elettrica assumano determinati valori e siano ammessi scostamenti solo di modesta entità.<br />
Le variazioni di carico attivo e reattivo, che le stesse utenze impongono alla rete, hanno<br />
l’effetto di modificare sia la frequenza sia la tensione della corrente elettrica prodotta dai<br />
valori nominali: tali variazioni costituiscono quindi una fonte di disturbo per il servizio<br />
fornito.<br />
Poiché, come noto, le turbine idrauliche hanno la caratteristica di eseguire delle rapide<br />
variazioni di carico, le centrali idroelettriche sono particolarmente adatte a realizzare la<br />
regolazione della frequenza elettrica che quindi per questi impianti riveste un’importanza<br />
particolare. La regolazione coinvolge oltre che le apparecchiature di regolazione, anche tutto<br />
il macchinario e le opere idrauliche dell’impianto. In un gruppo idroelettrico l’equilibrio<br />
dinamico è rispettato finché la potenza fornita dalla turbina idraulica, decurtata delle<br />
inevitabili perdite organiche, non è uguale alla potenza assorbita dal carico che viene<br />
alimentato dall’alternatore. In questa condizione la coppia motrice netta è uguale a quella<br />
resistente e la velocità del gruppo si mantiene costante e pari alla frequenza prestabilita per<br />
l’alimentazione della rete elettrica. La coppia resistente subisce però delle continue variazioni<br />
in funzione delle mutevoli esigenze dell’utenza, pertanto è necessario adeguare istante per<br />
istante la coppia motrice alle richieste dell’utenza agendo sul distributore della turbina.<br />
Questo intervento dovrà essere tale da modificare la portata in turbina in modo da ristabilire<br />
l’uguaglianza delle coppie. L’organo che agisce sul distributore è chiamato regolatore di<br />
velocità ed il suo intervento è determinato dalla variazione di velocità del gruppo, il quale<br />
inizialmente sopperisce alla improvvisa variazione di carico della rete con la variazione<br />
dell’energia cinetica delle proprie masse rotanti.<br />
Regolazione di velocità di una turbina idraulica<br />
La variazione del carico può essere di tipo diretto se determinata da una modifica della<br />
richiesta della rete, oppure di tipo indiretto, se dovuta a variazione del salto idraulico<br />
utilizzato dalla turbina. In entrambi i casi nasce uno squilibrio di coppia che porta il gruppo<br />
ad accelerare o a rallentare, in contrasto con la necessità di mantenere costante la velocità di<br />
rotazione dei generatori elettrici. Le variazioni del carico elettrico richiesto dall’utenza<br />
all’alternatore sono normalmente brusche e frequenti, per cui si rende necessario un<br />
regolatore a funzionamento automatico e rapido che ristabilisca prontamente l’equilibrio di<br />
coppia. Le variazioni del salto idraulico sono invece più graduali e lente per cui esse possono<br />
essere compensate anche con la regolazione manuale. Ovviamente se si usa ancora un<br />
regolatore automatico che è perfettamente in grado di svolgere questo compito, esso dovrà<br />
essere un regolatore di livello, nel senso che la portata in turbina dovrà essere regolata per<br />
mantenere costante il livello nel bacino di carico. Il regolatore agisce chiudendo o aprendo il<br />
distributore della turbina in modo da adeguare la portata e quindi la potenza motrice della<br />
turbina alla potenza richiesta dalla rete. Lo strumento che misura la variazione della velocità<br />
di rotazione è l’elemento sensibile che agisce sul regolatore e quindi provoca il suo<br />
intervento. Ne consegue che uno scarto di velocità all’inizio della regolazione è<br />
indispensabile per determinare il funzionamento del regolatore.<br />
Una buona regolazione deve soddisfare alle seguenti esigenze:<br />
mantenere costante la velocità in condizioni di regime stazionario,<br />
mantenere gli scarti transitori di velocità entro limiti tollerabili,<br />
riportare aperiodicamente o con oscillazioni rapidamente smorzate il gruppo alla velocità<br />
nominale.<br />
49
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Un regolatore di velocità è essenzialmente costituito da tre elementi:<br />
1. un elemento sensibile alla velocità di rotazione della macchina;<br />
2. un servomotore che, agendo per comando del sensore di velocità, apre o chiude il<br />
distributore della turbina;<br />
3. un dispositivo di asservimento, collegato alla posizione di apertura della turbina, che,<br />
quando questa ha raggiunto la nuova posizione di equilibrio, riporta il servomotore alla<br />
posizione di riposo.<br />
m<br />
a<br />
T<br />
r<br />
m<br />
b<br />
C<br />
V<br />
50<br />
S<br />
c<br />
A<br />
CHIUDE<br />
Figura 3.27 Schema elementare di un regolatore di velocità<br />
Uno schema elementare di un semplice regolatore di velocità è rappresentato in figura 3.27.<br />
L’organo sensibile alla velocità di rotazione della macchina è costituito in questo caso dal<br />
pendolo tachimetrico T. Se ad esempio la velocità aumenta, le masse rotanti m tendono ad<br />
allontanarsi per effetto della forza centrifuga. Benché questo movimento venga contrastato<br />
dall’azione della molla r, si produce uno spostamento verso l’alto del collare a che comanda<br />
l’asta principale ac del regolatore. Si verifica in questo modo uno spostamento del punto b e<br />
quindi del distributore a cassetto C che comanda il movimento del servomotore S.<br />
Quest’ultimo, che conferisce al sistema di regolazione un’azione integrale 4 , provoca la<br />
chiusura del distributore della turbina. Infatti ad ogni posizione dell’asta del servomotore<br />
corrisponde un determinato grado di apertura della turbina e quindi un preciso valore della<br />
potenza fornita dalla macchina. Il dispositivo di asservimento A (che introduce nella<br />
regolazione l’azione proporzionale 5 serve ad assicurare la stabilità della regolazione; la sua<br />
azione ha inizio solo quando l’asta del servomotore comincia il movimento di chiusura del<br />
distributore e si esercita sul cassetto di distribuzione in senso opposto all’azione che aveva<br />
ricevuto dal tachimetro. Esso quindi abbassa l’estremità c e quindi il punto b quando il collare<br />
a si è sollevato.<br />
Al fine di conseguire maggiore prontezza nella regolazione, si introduce nel sistema un<br />
elemento derivativo 6 costituito da un dispositivo sensibile all’accelerazione, ossia alla<br />
derivata della velocità.<br />
4 Nell’azione integrale la velocità di variazione dell’organo regolante è proporzionale alla grandezza regolata.<br />
L’azione integrale si annulla al ritorno della grandezza regolata al valore di riferimento (set-point). Il regolatore<br />
integrale è astatico.<br />
5 Nell’azione proporzionale la posizione dell’organo regolante è proporzionale allo scostamento della grandezza<br />
regolata dal valore di set-point. Il regolatore proporzionale è statico, ma a fine variazione permane uno<br />
scostamento tra grandezza regolata e set-point.<br />
6 Nell’azione derivativa la posizione dell’organo regolante è proporzionale alla velocità di variazione della<br />
grandezza regolata. Tale azione anticipa l’intervento dell’organo regolante immediatamente all’inizio della<br />
variazione<br />
APRE
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
Tale apparecchio, detto accelerometro, è affiancato al tachimetro e sviluppa un’azione<br />
stabilizzante che è concorde durante la fase di regolazione e contraria nella fase di<br />
surregolazione. La caratteristica di regolazione, che si ottiene da un regolatore del tipo<br />
descritto, è indicata nella figura 3.28: ad ogni apertura della turbina (e quindi ad ogni valore<br />
della potenza) corrisponde una determinata posizione del collare a e quindi una determinata<br />
velocità del gruppo. Nel funzionamento a vuoto corrisponde la frequenza f1; mentre a pieno<br />
carico PM corrisponde la frequenza f2 minore di f1.<br />
Si definisce statismo s del regolatore il rapporto tra la differenza delle frequenze estreme (f1f2)<br />
e la frequenza media fm=(f1+f2)/2.<br />
f<br />
f<br />
1<br />
f2<br />
arctg k<br />
∆ P<br />
∆f<br />
Figura 3.28 Caratteristica di<br />
regolazione di un regolatore<br />
P<br />
M<br />
s<br />
f<br />
−<br />
f<br />
1 2 = 3.94)<br />
f m<br />
Agendo sul variagiri V del regolatore, la caratteristica di<br />
regolazione può essere spostata parallelamente a se<br />
stessa; modificando i valori f1 e f2 della frequenza a<br />
vuoto e a pieno carico, ovvero il valore della potenza<br />
prodotta per un certo valore della frequenza. La<br />
regolazione di frequenza o di potenza ottenuta<br />
attraverso gli organi sensibili alle variazioni di velocità<br />
della macchina e secondo la caratteristica dello statismo<br />
si chiama regolazione primaria 7 , mentre si chiama<br />
regolazione secondaria 8 quella ottenuta agendo sul<br />
variagiri.<br />
Dalla caratteristica di regolazione deriva che ad una<br />
variazione di frequenza f segue, per azione del<br />
regolatore, una variazione P della potenza fornita dalla<br />
macchina:<br />
∆P = −k∆f<br />
3.95)<br />
Il coefficiente k (esprimibile in MW/Hz) si chiama energia regolante della macchina e<br />
rappresenta la variazione della potenza fornita dal gruppo per una variazione unitaria di<br />
frequenza. Se si indica con PM la potenza massima a pieno carico, risulta immediatamente<br />
7 La regolazione primaria viene eseguita automaticamente ed in maniera autonoma dai regolatori di velocità dei<br />
singoli gruppi di produzione. Se, ad esempio, la frequenza di rete diminuisce, ciascun regolatore reagisce<br />
aumentando gradualmente la potenza generata dal rispettivo motore primo. La potenza complessiva immessa in<br />
rete dai gruppi rimasti in servizio viene quindi aumentata, compensando man mano quella perduta. L’azione<br />
autonoma dei regolatori cessa quando l’equilibrio di potenza in rete si è ristabilito e la diminuzione di frequenza<br />
si è conseguentemente arrestata. La rete si trova ora in una nuova situazione di regime, in cui la frequenza ha un<br />
valore inferiore a quello di programma e la riserva complessiva di regolazione primaria è stata parzialmente<br />
consumata.<br />
8 La regolazione secondaria ha lo scopo di riportare la frequenza di rete al valore nominale. Anche la<br />
regolazione secondaria, come quella primaria, viene effettuata dai regolatori di velocità dei gruppi, ma sotto il<br />
controllo di un dispositivo automatico (regolatore secondario). Tale regolatore, sensibile all’errore f di frequenza<br />
e all’errore Ps sulla potenza importata dall’estero, modifica i set-point dei singoli regolatori di velocità e, se la<br />
frequenza è inferiore a 50 Hz, aumenta ulteriormente la potenza erogata dai gruppi fino ad annullare f e Ps<br />
(regolazione frequenza-potenza).<br />
51
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
P<br />
k =<br />
M M<br />
= 3.96)<br />
f1<br />
− f 2 s fm<br />
L’energia regolante, per una data macchina, è inversamente proporzionale allo statismo del<br />
suo regolatore. Un regolatore di questo tipo, con statismo diverso da zero, si chiama statico e<br />
la regolazione di frequenza che si ottiene si chiama pure statica. Si tratta di una regolazione<br />
stabile perché il dispositivo di asservimento, esercitando sul servomotore un’azione<br />
antagonista a quella della variazione di velocità, tende a riportare il cassetto di distribuzione<br />
nella sua posizione di riposo e a far assumere al distributore la nuova posizione di equilibrio<br />
senza oscillazioni. La caratteristica del regolatore statico è infatti decrescente nel passare dal<br />
funzionamento a vuoto a quello di pieno carico. La stabilità cresce con lo statismo, ma la<br />
variazione di frequenza da vuoto a pieno carico, che si accompagna ad un elevato statismo,<br />
non è tollerabile. Oggi si richiede che le variazioni di frequenza siano contenute entro limiti<br />
ristrettissimi. Per soddisfare questa esigenza la regolazione deve essere a frequenza pressoché<br />
costante o isodromica. Una tale regolazione si potrebbe ottenere con un regolatore astatico (a<br />
statismo nullo) che può essere realizzato in modo semplice rendendo fisso il punto c, ossia<br />
sopprimendo il dispositivo di asservimento A: in tal caso il cassetto di distribuzione C può<br />
stare in equilibrio solo se il collare a, dopo il periodo transitorio, va a rioccupare sempre la<br />
stessa posizione, alla quale corrisponde un’unica velocità. Tale regolazione, che si può<br />
chiamare astatica, è a velocità costante e la sua caratteristica è una retta parallela all’asse delle<br />
ascisse. Questa regolazione non è però stabile, perché nel regolatore non nasce nessuna<br />
azione antagonista a quella dovuta alla variazione di velocità.<br />
v<br />
v<br />
0<br />
P 1<br />
P 2<br />
P<br />
Regolazione isodromica<br />
v<br />
t t 1 t 2 t 3<br />
0 t<br />
Figura 3.29 Regolazione isodromica<br />
senza stabilizzatori.<br />
P<br />
52<br />
P<br />
Essa dà luogo a permanenti oscillazioni di<br />
velocità e di apertura e chiusura del distributore<br />
della turbina attorno ai valori corrispondenti alle<br />
nuove condizioni di regime. Infatti, riferendosi<br />
alla figura 3.29, se in un certo istante t0 la<br />
potenza erogata dall’alternatore si riduce<br />
improvvisamente, resta disponibile sull’asse<br />
della turbina un eccesso di potenza ∆P=P1-P2 (e<br />
un corrispondente eccesso di coppia motrice), la<br />
velocità aumenta e il regolatore interviene a<br />
chiudere il distributore della turbina. Quando<br />
nell’istante t1 l’eccesso di potenza ∆P si è ridotto<br />
a zero, la velocità ha raggiunto il massimo e il<br />
cassetto di distribuzione continua a comandare la<br />
chiusura della turbina; ciò dà luogo ad<br />
un’ulteriore diminuzione della potenza erogata<br />
(∆P diviene negativo), cui corrisponde una<br />
decelerazione e una diminuzione di velocità del<br />
gruppo. Ma quando nell’istante t2 la velocità riassume il suo valore nominale e quindi si<br />
ripristina l’equilibrio del cassetto di distribuzione, il valore negativo di ∆P ha raggiunto un<br />
massimo (uguale al massimo ∆P positivo) e la velocità continua a diminuire. Il cassetto di<br />
distribuzione interviene allora a comandare l’apertura del distributore; si riduce il ∆P negativo<br />
fino a diventare zero nell’istante t3 (equilibrio delle potenze), ma la velocità ha raggiunto un<br />
minimo, e il cassetto di distribuzione continua a comandare l’apertura del distributore; si<br />
riforma così un ∆P positivo e il fenomeno continua indefinitamente con oscillazioni<br />
persistenti di tutti gli organi interessati, che rivelano l’incapacità del regolatore a raggiungere
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
in modo stabile la nuova posizione di regime. In pratica poi, per l’inerzia delle masse in moto,<br />
che determina ritardi nei movimenti dei diversi organi del regolatore, i fenomeni di<br />
surregolazione si esaltano, per cui le oscillazioni si amplificano e la stabilità ne risulta<br />
ulteriormente peggiorata. Se invece la regolazione è statica (figura 3.30), con statismo<br />
positivo, le oscillazioni della velocità e del cassetto di distribuzione vanno gradualmente<br />
smorzandosi, con smorzamento tanto più forte quanto più elevato è lo statismo. Infatti il<br />
dispositivo di asservimento, interviene non appena si inizia la manovra di apertura o di<br />
chiusura della turbina, spostando il punto c in senso contrario allo spostamento del collare a,<br />
contrastando il comando precedentemente impartito al cassetto di distribuzione e facilitando il<br />
suo ritorno allo stato di equilibrio.<br />
Da un punto di vista energetico si può osservare che, nella regolazione statica, la variazione di<br />
energia cinetica delle masse rotanti, nel passare da una situazione di regime ad una nuova, ha<br />
l’effetto di ridurre lo squilibrio di potenza durante il regime transitorio, compensando la causa<br />
perturbatrice ed esercitando quindi un’azione stabilizzante. Per conciliare le esigenze della<br />
stabilità con quelle della regolazione a frequenza costante si agisce in pratica sostanzialmente<br />
in due modi diversi: rendendo elastico (mediante un freno ad olio F contrastato da una molla<br />
m) il collegamento fra il dispositivo di asservimento A e il punto c in un regolatore con<br />
elevato grado di staticità (statismo transitorio), oppure ricorrendo alla correzione dell’azione<br />
tachimetrica con dispositivi accelerometrici.<br />
v<br />
v<br />
2<br />
v1<br />
P1<br />
P 2<br />
P<br />
t<br />
0<br />
t<br />
1<br />
v<br />
Regolazione statica<br />
t 2<br />
t<br />
3<br />
Figura 3.30 Regolazione statica.<br />
P<br />
t<br />
Con il primo sistema si ha inizialmente una<br />
regolazione statica con statismo sufficientemente<br />
alto per ottenere un rapido smorzamento delle<br />
oscillazioni; in una fase successiva lo statismo<br />
iniziale viene gradualmente ridotto. Con il<br />
secondo sistema, in un regolatore astatico, si<br />
aggiunge al tachimetro un accelerometro: questo<br />
può essere separato dal tachimetro e agire<br />
direttamente sul punto c oppure può essere<br />
conglobato con il tachimetro a formare un unico<br />
apparecchio che agisce sul collare a. Le azioni<br />
del tachimetro e dell’accelerometro sono<br />
concordi durante la prima fase del moto vario in<br />
cui la velocità e l’accelerazione hanno lo stesso<br />
segno (periodo t0-t1); ma subito dopo (periodo t1t2),<br />
quando inizia la fase di surregolazione, esse<br />
hanno segno opposto e l’accelerometro esercita<br />
un’azione antagonista al tachimetro e perciò<br />
stabilizzatrice. La regolazione realizzata in tal modo si chiama regolazione isodromica<br />
stabilizzata (figura 3.31).<br />
I regolatori di turbina testé descritti sono stati progressivamente sostituiti da regolatori di<br />
velocità elettrici; i segnali delle varie grandezze sono tutti convertiti in segnali elettrici, che<br />
vengono opportunamente amplificati ed elaborati e vanno a comandare attuatori oleodinamici.<br />
Il principio di funzionamento rimane lo stesso, ma i regolatori elettrici presentano innegabili<br />
pregi rispetto ai regolatori meccanici:<br />
• hanno grande sensibilità, anche a piccolissimi scarti di frequenza;<br />
• presentano maggior prontezza d’intervento per l’assenza di inerzie meccaniche;<br />
• non hanno alcuna limitazione per la scelta e il numero delle grandezze da far intervenire<br />
nella regolazione.<br />
53
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
In essi si può, ad esempio, rendere sensibile il regolatore all’accelerazione del gruppo, alla<br />
posizione e alla velocità di spostamento del servomotore, a segnali esterni (telecomandi,<br />
comandi manuali) di cui si dosa l’effetto nel modo desiderato. Inoltre i regolatori elettrici<br />
offrono la possibilità di variare in servizio la partecipazione del gruppo alla regolazione, per<br />
metterlo nelle migliori condizioni di stabilità in ogni condizione di esercizio; infine<br />
permettono una facile soluzione dei problemi relativi al comando centralizzato di più gruppi,<br />
anche molto lontani tra loro.<br />
m<br />
a c<br />
S<br />
F<br />
A<br />
CHIUDE APRE<br />
Figura 3.31 Regolazione isodromica stabilizzata.<br />
Regolazione della frequenza in una rete alimentata da più gruppi<br />
In una rete alimentata da più macchine il problema della regolazione della frequenza è<br />
associato a quello della ripartizione del carico fra le macchine stesse. Se tutte sono munite di<br />
regolatori aventi statismo non nullo, la ripartizione del carico tra le stesse risulta ovviamente<br />
determinata: ad ogni valore della frequenza corrisponde un ben definito valore della potenza<br />
generata da ciascuna macchina. Ad ogni scarto di frequenza f corrisponde in ciascuna<br />
macchina una variazione di potenza generata ∆Pi=-kfi e quindi una variazione complessiva<br />
54<br />
r<br />
Regolazione isodromica stabilizzata<br />
∆P = ∑ ∆Pi<br />
= −∑<br />
ki∆f<br />
= −k<br />
∆f<br />
3.97)<br />
essendo k=∑ki.<br />
L’energia regolante k di una rete è quindi la somma delle energie regolanti ki delle singole<br />
macchine. Ciascuna macchina partecipa alla regolazione, ossia fa fronte ad una quota-parte<br />
della totale variazione di carico ∆P, in misura proporzionale alla propria energia regolante.<br />
Risulta infatti<br />
ki<br />
∆Pi = −ki∆f<br />
= − ∆P<br />
3.98)<br />
k<br />
Si supponga ora che una macchina sia munita di regolatore isodromico di velocità, mentre<br />
tutte le altre abbiano regolatori statici. La frequenza risulta allora fissata, sempre<br />
prescindendo dai periodi transitori, al valore costante f0 imposto dalla prima macchina che<br />
viene quindi chiamata “pilota”. Le altre forniscono, qualunque sia l’entità del carico<br />
complessivo assorbito dalla rete, la potenza che sulla loro caratteristica corrisponde alla<br />
v<br />
v<br />
0<br />
P<br />
1<br />
P 2<br />
P<br />
t0<br />
t1<br />
v<br />
t 2<br />
t 3<br />
P<br />
t
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
frequenza f0, mentre la differenza necessaria a coprire l’intera richiesta del carico, viene<br />
fornita dalla macchina pilota. Questa inoltre deve far fronte da sola ad ogni variazione del<br />
carico assorbito dalla rete; le altre interverrebbero solo se la frequenza variasse. Naturalmente<br />
in una rete non si può avere che una sola macchina munita di regolatore con statismo<br />
permanente nullo perché, se ce ne fosse più di una, la ripartizione del carico tra le stesse<br />
rimarrebbe ovviamente indeterminata.<br />
f<br />
f0<br />
Macchina regolatrice<br />
della frequenza<br />
PILOTA<br />
P P<br />
1<br />
f<br />
Macchina ad acqua fluente<br />
a produzione costante<br />
55<br />
2<br />
f<br />
Macchina su cui si effettua<br />
la regolazione secondaria<br />
Figura 3.32 Caratteristiche dei regolatori di velocità di macchine collegate ad una stessa rete.<br />
In pratica lo statismo da assegnare alle diverse macchine o centrali di una rete deve essere<br />
scelto in modo da assicurare la più economica e razionale ripartizione del carico tra le varie<br />
centrali. Così le macchine installate in centrali ad acqua fluente, prive cioè di serbatoi, devono<br />
utilizzare al massimo l’acqua disponibile ad evitare che sfiori e che vada quindi perduta<br />
dell’energia; esse devono perciò funzionare, finché possibile, alla piena potenza disponibile<br />
con regolatore praticamente bloccato (eventualmente asservito al livello di acqua a monte<br />
della presa) o comunque con statismo molto elevato. Il compito di regolazione più pesante<br />
(macchine con regolatore a statismo permanente nullo o comunque piccolo, e quindi con<br />
energie regolanti relativamente elevate) va viceversa affidato alle centrali dotate di serbatoi,<br />
in particolare ad alta caduta, nelle quali l’acqua può venire accumulata per essere poi<br />
utilizzata nel momento più opportuno. Volendo cambiare la distribuzione del carico tra le<br />
diverse macchine di una rete, basta poi agire sul variagiri dei diversi regolatori (regolazione<br />
secondaria): la caratteristica si sposta parallelamente a se stessa e di conseguenza cambia il<br />
valore della potenza generata in corrispondenza di una certa frequenza. Una manovra del<br />
genere è spesso necessaria quando si adotti il sistema di regolazione con macchina pilota (o<br />
centrale pilota, quando tutte le macchine di una centrale sono comandate dallo stesso<br />
regolatore) perché quest’ultima, assorbendo tutte le variazioni del carico, facilmente potrebbe<br />
arrivare al pieno carico o alla marcia a vuoto, esaurendo così il suo campo di regolazione: si<br />
deve allora correggere la produzione delle macchine delle altre centrali agendo sui rispettivi<br />
variagiri ed eventualmente, a seconda dei casi, arrestarne alcune o metterne in marcia delle<br />
altre. Il diagramma giornaliero del carico è caratterizzato da ampie ma lente variazioni tra le<br />
ore diurne e le notturne, a cui si sovrappongono frequenti oscillazioni accidentali dovute ai<br />
bruschi attacchi e stacchi di carichi. Queste oscillazioni vengono assorbite automaticamente<br />
dalla macchina o dalle macchine particolarmente destinate alla regolazione della frequenza,<br />
mentre alle variazioni più lente si fa fronte agendo sui variagiri delle altre macchine ed<br />
eventualmente arrestandone alcune nelle ore notturne, quando il carico diminuisce, e<br />
rimettendole in marcia al mattino, quando il carico va aumentando. Se poi la rete è molto<br />
estesa ed una sola macchina o una sola centrale pilota non è sufficiente per assolvere il<br />
compito della regolazione isodromica della frequenza, si può provvedere a comandare più<br />
centrali parallelamente con un unico regolatore in guisa da formare virtualmente un unico<br />
P<br />
3
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
complesso pilota di maggior potenza. Si può anche affidare la regolazione della frequenza a<br />
più centrali con statismo molto piccolo ma non nullo e diverso dall’una all’altra; con<br />
un’opportuna scelta degli statismi si può ottenere una buona ripartizione del carico e le<br />
variazioni di frequenza possono essere contenute in limiti molto ristretti. Quando si tratta di<br />
reti molto estese, fra loro interconnesse, si deve ricorrere invece alla regolazione frequenzapotenza.<br />
Con tale regolazione si vuole ottenere che, nel caso di una variazione di carico in una<br />
delle reti interconnesse, siano i generatori di quella rete a sopperire, a regime permanente<br />
raggiunto, alla detta variazione di carico, mentre le altre reti intervengono collaborando a<br />
ristabilire la frequenza solo nel periodo transitorio che segue la variazione stessa, durante il<br />
quale la frequenza si discosta inevitabilmente dal valore normale. Ciò si ottiene imponendo,<br />
grazie all’impiego di opportuni regolatori, che la potenza scambiata da ciascuna rete,<br />
considerata positiva se esportata, possa aumentare o diminuire rispetto al valore di<br />
programma solo quando la frequenza sia rispettivamente inferiore o superiore al valore<br />
normale f0. Il regolatore frequenza-potenza è un regolatore elettrico sensibile<br />
contemporaneamente alle variazioni di frequenza della rete e alle variazioni della potenza di<br />
scambio sulla linea di interconnessione controllata dal regolatore. Esso agisce sui variagiri dei<br />
regolatori di velocità delle macchine destinate alla regolazione, i quali sono sottratti all’azione<br />
dei tachimetri. L’equazione del regolatore è:<br />
∆ + k ∆f<br />
= 0<br />
3.99)<br />
P s<br />
dove ∆Ps= Ps-P0 è la variazione della potenza di scambio rispetto a quella di programma P0 e<br />
∆f=(f-f0) è la variazione della frequenza della rete rispetto alla frequenza normale f0.<br />
Esercizio delle centrali idroelettriche<br />
Avviamento e marcia dei gruppi<br />
La sequenza delle manovre di avviamento di un gruppo idroelettrico è la seguente:<br />
• avviare le pompe olio di lubrificazione dei cuscinetti e di regolazione della turbina,<br />
aprire il bypass della valvola a monte del gruppo e quindi la valvola stessa, mantenendo<br />
il distributore di turbina chiuso;<br />
• aprire il distributore della turbina per avviare il gruppo e successivamente regolare<br />
l’apertura per tenerlo in marcia a vuoto ai giri nominali, passando sotto il controllo del<br />
regolatore di velocità quando questa supera l’80% circa della velocità nominale;<br />
• eccitare l’alternatore, regolando la tensione al valore corrispondente a quello della rete;<br />
• fare il parallelo del gruppo con la rete chiudendo l’interruttore di macchina a<br />
sincronizzazione effettuata, ossia quando la forza elettromotrice generata<br />
dall’alternatore è uguale e in fase con la tensione di sbarra e quando la frequenza di<br />
macchina e di sbarra sono uguali.<br />
L’alternatore è ora in parallelo con la rete, ma non eroga né assorbe potenza; per generare<br />
potenza attiva occorre aprire ulteriormente il distributore della turbina. Agendo sul regolatore<br />
di tensione e variando la corrente di eccitazione, si farà erogare all’alternatore anche potenza<br />
reattiva: sarà potenza reattiva induttiva, se si aumenterà la corrente di eccitazione; viceversa,<br />
diseccitando, si erogherà potenza reattiva capacitiva. Durante la marcia del gruppo si hanno<br />
continue variazioni della potenza richiesta all’alternatore e quindi della coppia resistente.<br />
Ogniqualvolta ciò si verifica, nasce uno squilibrio fra la coppia motrice e la coppia resistente:<br />
questo determina l’intervento del regolatore di velocità e quindi variazioni dell’apertura del<br />
distributore di turbina, con conseguenti fenomeni di moto vario di tutto il complesso idraulico<br />
56
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
e meccanico. Le variazioni di potenza possono essere graduali o brusche. Nel primo caso la<br />
lentezza della variazione permette al regolatore la tempestiva manovra degli organi del<br />
distributore e le variazioni di velocità sono contenute nei limiti della staticità e<br />
dell’insensibilità del regolatore; nel secondo caso si avrà una rilevante variazione transitoria<br />
della velocità, il cui valore normale si ristabilirà dopo un certo tempo, che dipende dal<br />
momento d’inerzia delle masse rotanti e dalle caratteristiche funzionali dei regolatori. Il caso<br />
limite è quello del brusco distacco di carico dalla potenza massima P0, che conduce alla<br />
massima variazione di velocità. Poiché non si potrà annullare istantaneamente la coppia<br />
motrice, ma occorrerà un tempo T0, ammettendo che la chiusura del distributore (e quindi la<br />
diminuzione di potenza) avvenga con legge lineare, si avrà una certa energia disponibile<br />
∆E=(P0T0)/2 che avrà come effetto quello di accelerare il gruppo.<br />
Se ω0 è la velocità di rotazione a regime, ω1 la velocità massima raggiunta e J il momento<br />
d’inerzia assiale delle masse in rotazione, si avrà che<br />
2 2 ( ω − ω )<br />
J<br />
2<br />
1 0<br />
P0T<br />
=<br />
2<br />
2 2 P0T<br />
0<br />
ω1<br />
− ω0<br />
=<br />
J<br />
57<br />
0<br />
3.100)<br />
Le grandezze caratteristiche del gruppo generatore possono essere raggruppate nel tempo<br />
2<br />
Jω0<br />
caratteristico del gruppo Tω<br />
= , detto anche tempo di avviamento del gruppo, che ha un<br />
P0<br />
valore normalmente compreso fra 5 e 10 secondi. Allora sarà:<br />
2 2<br />
ω1<br />
− ω0<br />
P0T<br />
0 T<br />
= =<br />
2<br />
2<br />
ω Jω<br />
T<br />
0<br />
⎛ ω ⎞ 1<br />
⎜<br />
ω ⎟<br />
⎝ 0 ⎠<br />
2<br />
T<br />
= 1 +<br />
T<br />
0<br />
0<br />
ω<br />
0<br />
ω<br />
3.101)<br />
Il tempo di chiusura T0 dovrebbe essere assai breve per contenere le variazioni di velocità<br />
entro limiti tollerabili, ma ciò provocherebbe eccessive variazioni di pressione nella condotta.<br />
In alcuni casi è pertanto necessario ricorrere al tegolo deviatore o allo scarico sincrono per<br />
poter ridurre lentamente la portata, pur togliendo rapidamente la potenza motrice alla ruota. In<br />
tal caso il tempo che si considera nel calcolo non è il tempo di chiusura del distributore<br />
(15÷30 s) ma quello assai minore (1÷4 s) dei dispositivi sopra citati. Se si stabilisce la<br />
massima variazione di velocità consentita (praticamente dell’ordine del 10÷20%), si può<br />
ricavare il momento d’inerzia necessario per il gruppo generatore in relazione al tempo di<br />
chiusura del distributore della turbina; questo risulta tanto più elevato quanto minore è lo<br />
scarto di velocità ammesso, quanto minore è la velocità di rotazione a regime ω0 e quanto<br />
maggiore è il tempo di chiusura del distributore. I costruttori del macchinario specificano<br />
molto spesso il momento dinamico PD 2 della macchina, dove P=Mg è il peso delle parti in<br />
rotazione e D è il diametro d’inerzia (D=2R). Vale la relazione:<br />
2<br />
2<br />
2<br />
2 PD<br />
J = ∫ r dm = ∫ ρ r dv = MR =<br />
3.102)<br />
4g<br />
M<br />
V
Dinamica e Controllo dei Sistemi Energetici Capitolo 3<br />
________________________________________________________________________________________________________________<br />
dove r è la distanza della massa infinitesima dm (di densità ρ e volume dv) dall’asse di<br />
rotazione.<br />
Continuità del servizio<br />
Per assicurare la continuità del servizio si devono prevenire i guasti sugli impianti o<br />
minimizzarne gli effetti. Fra i guasti agli impianti che possono compromettere la continuità<br />
del servizio ricordiamo quelli alle opere idrauliche: fessurazioni dei paramenti delle dighe,<br />
danni alle sponde dei canali o all’intonaco delle gallerie in pressione. Il macchinario idraulico<br />
può subire i dannosi effetti della cavitazione o rotture ad opera di corpi estranei trascinati<br />
dalla corrente. Nel macchinario elettrico si possono avere cedimenti dell’isolamento o danni<br />
provocati dal riscaldamento eccessivo. Altre anomalie possono essere causate da eventi<br />
esterni all’impianto in esame, quali scariche atmosferiche, alluvioni, caduta di alberi sui<br />
conduttori di una linea, nonché cortocircuiti e sovraccarichi negli impianti utilizzatori che si<br />
ripercuotono sulla rete di alimentazione. Per prevenire i guasti, oltre ad una corretta<br />
progettazione e costruzione degli impianti, è assai importante effettuare una tempestiva e<br />
accurata manutenzione degli stessi, che può essere preventiva (a cadenza temporale) o<br />
predittiva (decisa in base a misure e controlli), accuratamente programmata al fine di ridurre<br />
l’indisponibilità dei gruppi generatori. Per ridurre al minimo le conseguenze dei guasti si deve<br />
disporre di un razionale sistema di protezioni. Queste ultime si possono suddividere in tre<br />
raggruppamenti:<br />
• protezioni che danno solo un segnale di allarme per condizioni non regolari,<br />
consentendo però la prosecuzione del servizio: sono quelle che evidenziano anomalie o<br />
guasti che non compromettono il funzionamento della centrale, come la protezione di<br />
terra rotorica dell’alternatore o il primo contatto del relè Buchholz di un trasformatore.<br />
• protezioni che aprono l’interruttore di macchina e diseccitano l’alternatore, lasciando<br />
però il gruppo a velocità nominale: sono protezioni per guasti esterni (sovraccarico o<br />
cortocircuito sulle sbarre). Le protezioni sulle linee in uscita dalla centrale non<br />
interferiscono normalmente con il funzionamento del gruppo, ma escludono il più<br />
piccolo tratto di linea guasto (protezioni selettive del tipo con relè distanziometrico),<br />
dopo aver tentato almeno una nuova chiusura per eliminare i guasti transitori.<br />
• protezioni con blocco totale del gruppo, che aprono l’interruttore di macchina,<br />
diseccitano l’alternatore, chiudono il distributore della turbina e le valvole rotative,<br />
arrestano le macchine: sono quelle che intervengono per gravi guasti interni al gruppo<br />
generatore (protezione differenziale, cortocircuito tra spire, terra statorica, bassissima<br />
pressione olio cuscinetti turbina, ecc.). Questi relè agiscono su un apposito relè di<br />
blocco, che comanda automaticamente la sequenza di manovre di fermata. Il relè di<br />
blocco può anche essere azionato manualmente per effettuare una fermata programmata.<br />
58