Global Positioning System Lavoro di maturit`a - Liceo cantonale di ...
Global Positioning System Lavoro di maturit`a - Liceo cantonale di ...
Global Positioning System Lavoro di maturit`a - Liceo cantonale di ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
103 Capitolo 11. Aspetti pratici<br />
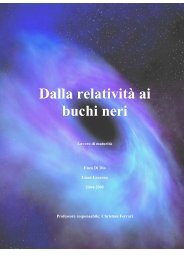
(a) (b)<br />
Figura 11.3: Calcolo della posizione e altri dati elaborati.<br />
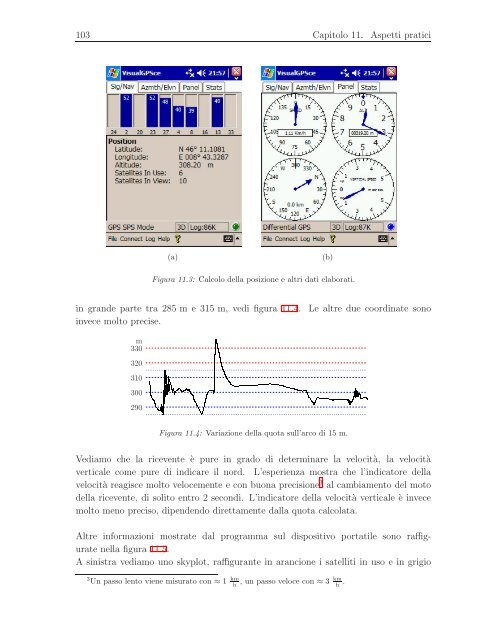
in grande parte tra 285 m e 315 m, ve<strong>di</strong> figura 11.4. Le altre due coor<strong>di</strong>nate sono<br />
invece molto precise.<br />
330 m<br />
320<br />
310<br />
300<br />
290<br />
Figura 11.4: Variazione della quota sull’arco <strong>di</strong> 15 m.<br />
Ve<strong>di</strong>amo che la ricevente è pure in grado <strong>di</strong> determinare la velocità, la velocità<br />
verticale come pure <strong>di</strong> in<strong>di</strong>care il nord. L’esperienza mostra che l’in<strong>di</strong>catore della<br />
velocità reagisce molto velocemente e con buona precisione 3 al cambiamento del moto<br />
della ricevente, <strong>di</strong> solito entro 2 secon<strong>di</strong>. L’in<strong>di</strong>catore della velocità verticale è invece<br />
molto meno preciso, <strong>di</strong>pendendo <strong>di</strong>rettamente dalla quota calcolata.<br />
Altre informazioni mostrate dal programma sul <strong>di</strong>spositivo portatile sono raffigurate<br />
nella figura 11.5.<br />
A sinistra ve<strong>di</strong>amo uno skyplot, raffigurante in arancione i satelliti in uso e in grigio<br />
3 km<br />
km<br />
Un passo lento viene misurato con ≈ 1 h , un passo veloce con ≈ 3 h .