Tecnica di isolamento dalle vibrazioni
Tecnica di isolamento dalle vibrazioni
Tecnica di isolamento dalle vibrazioni

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
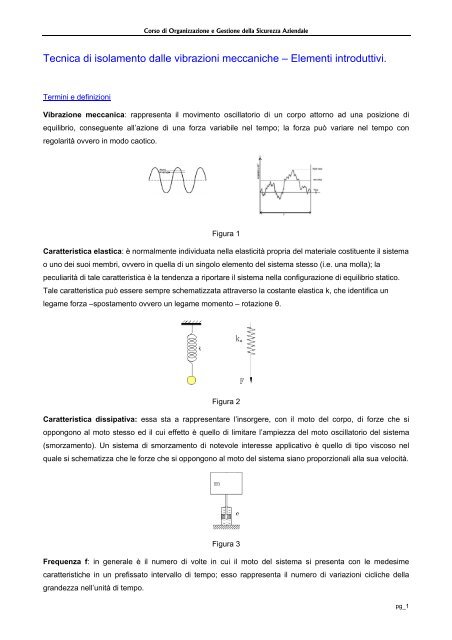
<strong>Tecnica</strong> <strong>di</strong> <strong>isolamento</strong> <strong>dalle</strong> <strong>vibrazioni</strong> meccaniche – Elementi introduttivi.<br />
Termini e definizioni<br />
Vibrazione meccanica: rappresenta il movimento oscillatorio <strong>di</strong> un corpo attorno ad una posizione <strong>di</strong><br />
equilibrio, conseguente all’azione <strong>di</strong> una forza variabile nel tempo; la forza può variare nel tempo con<br />
regolarità ovvero in modo caotico.<br />
Figura 1<br />
Caratteristica elastica: è normalmente in<strong>di</strong>viduata nella elasticità propria del materiale costituente il sistema<br />
o uno dei suoi membri, ovvero in quella <strong>di</strong> un singolo elemento del sistema stesso (i.e. una molla); la<br />
peculiarità <strong>di</strong> tale caratteristica è la tendenza a riportare il sistema nella configurazione <strong>di</strong> equilibrio statico.<br />
Tale caratteristica può essere sempre schematizzata attraverso la costante elastica k, che identifica un<br />
legame forza –spostamento ovvero un legame momento – rotazione θ.<br />
Figura 2<br />
Caratteristica <strong>di</strong>ssipativa: essa sta a rappresentare l’insorgere, con il moto del corpo, <strong>di</strong> forze che si<br />
oppongono al moto stesso ed il cui effetto è quello <strong>di</strong> limitare l’ampiezza del moto oscillatorio del sistema<br />
(smorzamento). Un sistema <strong>di</strong> smorzamento <strong>di</strong> notevole interesse applicativo è quello <strong>di</strong> tipo viscoso nel<br />
quale si schematizza che le forze che si oppongono al moto del sistema siano proporzionali alla sua velocità.<br />
Figura 3<br />
Frequenza f: in generale è il numero <strong>di</strong> volte in cui il moto del sistema si presenta con le medesime<br />
caratteristiche in un prefissato intervallo <strong>di</strong> tempo; esso rappresenta il numero <strong>di</strong> variazioni cicliche della<br />
grandezza nell’unità <strong>di</strong> tempo.<br />
pg_1
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
Figura 4<br />
Quando il moto si ripete con le medesime caratteristiche in un intervallo <strong>di</strong> tempo ben definito, detto periodo<br />
T, la frequenza rappresenta il numero delle oscillazioni complete per unità <strong>di</strong> tempo:<br />
1<br />
f =<br />
T<br />
Quando il periodo è espresso in secon<strong>di</strong>, la frequenza è espressa in s -1 ; tale unità è detta hertz, abbreviato<br />
in Hz. Un termine utilizzato per esprimere la frequenza è anche cicli per minuto (cpm), invece che Hz, in tal<br />
caso l’equivalenza tra le due unità <strong>di</strong> misura è data da 1Hz= 60 cpm. Talvolta si fa riferimento alla pulsazione<br />
ω=2πf (espressa in rivoluzioni per minuto – rpm).<br />
Frequenza naturale fn (o frequenza propria): rappresenta la frequenza con cui vibra un sistema che ha<br />
soltanto caratteristiche elastiche e non è soggetto a forze esterne attive variabili nel tempo del tipo F(t).<br />
Figura 5<br />
Frequenza eccitatrice f (o frequenza forzante): è quella dovuta all’azione esterna F(t), se presente, che<br />
agisce sul sistema con variabilità <strong>di</strong>pendente dal tempo.<br />
Figura 6<br />
Vibrazioni libere: sono da intendersi quelle concernenti un sistema che, allontanato dalla con<strong>di</strong>zione <strong>di</strong><br />
equilibrio statico, viene lasciato libero <strong>di</strong> oscillare in assenza <strong>di</strong> forze <strong>di</strong> eccitazione esterne F(t). Nel caso <strong>di</strong><br />
fig.5 se noi spostiamo la massa verso l’alto e poi lasciamo libero il sistema, si parlerà <strong>di</strong> oscillazioni libere, in<br />
quanto non agiscono forze esterne. In tal caso il sistema oscillerà con una determinata frequenza detta<br />
propria fn.<br />
Vibrazioni smorzate: rispetto al caso semplificato prima citato, noi sappiamo che nella realtà le ampiezze<br />
delle oscillazioni <strong>di</strong>minuiscono finchè il sistema non si arresta del tutto: questo in quanto nei sistemi reali si<br />
pg_2
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
ha uno smorzamento dovuto agli attriti interni, posseduti più o meno da tutti i corpi e <strong>di</strong>pendente dal<br />
materiale costituente gli stessi.<br />
Figura 7<br />
Vibrazioni forzate: sono intese come le <strong>vibrazioni</strong> <strong>di</strong> un sistema sottoposto all’azione <strong>di</strong> forze eccitatrici<br />
esterne F(t). Esse sono generate da elementi interni alla macchina i quali hanno una frequenza correlata<br />
con il numero <strong>di</strong> giri del motore: ad esempio il movimento <strong>di</strong> una pompa alternativa che genera all’inversione<br />
del moto una forza <strong>di</strong> <strong>di</strong>strurbo <strong>di</strong> rilevante entità.<br />
Risonanza: nel caso in cui la frequenza <strong>di</strong> eccitazione del sistema coincide con la frequenza propria dello<br />
stesso vi è un’amplificazione delle oscillazioni con la conseguenza che le forze trasmesse all’esterno del<br />
sistema, in generale al basamento, sono molto alte.<br />
Analisi delle <strong>vibrazioni</strong> forzate<br />
Si prenda in esame lo schema <strong>di</strong> figura 8 che rappresenta il caso generale <strong>di</strong> un corpo <strong>di</strong> massa concentrata<br />
m sospeso ad una molla <strong>di</strong> rigidezza k e vincolato ad uno smorzatore <strong>di</strong> tipo viscoso il cui coefficiente <strong>di</strong><br />
smorzamento sia c, inoltre agisca sulla massa un’azione forzante esterna F(t). Si supponga che alla massa<br />
sia consentito il solo spostamento nella <strong>di</strong>rezione verticale (si considerano trascurabili gli spostamenti in<br />
<strong>di</strong>rezione trasversale), in tale ipotesi se ne vuole determinare l’equazione del moto. Va considerato che nella<br />
configurazione <strong>di</strong> equilibrio statico (senza considerare l’azione forzante F) il corpo è soggetto al suo peso P<br />
sorretto dalla reazione elastica della molla che si è deformata <strong>di</strong> δ rispetto alla sua lunghezza libera l, deve<br />
valere quin<strong>di</strong> la relazione:<br />
P = k ⋅ δ<br />
Utilizzando le equazioni car<strong>di</strong>nali della <strong>di</strong>namica, la con<strong>di</strong>zione <strong>di</strong> equilibrio del sistema nella generica<br />
configurazione si può esprimere attraverso la relazione:<br />
r r<br />
R + R<br />
dove R r sta ad in<strong>di</strong>care la risultante <strong>di</strong> tutte le forze agenti su <strong>di</strong> esso ed<br />
' =<br />
Figura 8<br />
0<br />
'<br />
R r la risultante delle forze d’inerzia.<br />
pg_3
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
L’equazione <strong>di</strong> equilibrio alla traslazione si può scrivere:<br />
in cui le forze attive, reattive e d’inerzia sono:<br />
la forza peso P;<br />
la forza eccitatrice esterna F(t);<br />
la reazione elastica della molla − k ( x + δ)<br />
;<br />
la reazione dello smorzatore viscoso − c x&<br />
;<br />
la forza d’inerzia<br />
− m &x<br />
&<br />
P − k ( x + δ)<br />
− c x&<br />
+ F − m &x<br />
& = 0<br />
tenendo conto della con<strong>di</strong>zione <strong>di</strong> equilibrio statico e rior<strong>di</strong>nando la relazione precedente si arriva<br />
all’equazione <strong>di</strong>fferenziale del moto nella forma:<br />
m & x&<br />
+ c x&<br />
+ k x = F<br />
che una volta integrata, ci darà la legge del moto del corpo in esame.<br />
Prima <strong>di</strong> procedere all’integrazione, dobbiamo introdurre il coefficiente <strong>di</strong> smorzamento critico:<br />
c cr<br />
= 2 k m = 2m<br />
ω<br />
avendo posto la pulsazione naturale ωn del sistema pari a:<br />
e inoltre essendo<br />
c<br />
m<br />
=<br />
c<br />
m<br />
ω n =<br />
Chiameremo, inoltre, fattore <strong>di</strong> smorzamento il rapporto<br />
k<br />
m<br />
2ωn<br />
c c<br />
⋅ = 2 ωn<br />
= 2 ωn<br />
= 2ξ<br />
ωn<br />
2 ωn<br />
2 m ωn<br />
ccr<br />
c<br />
ξ =<br />
ccr<br />
che si configura come un numero che sta ad in<strong>di</strong>care se il valore del coefficiente <strong>di</strong> smorzamento c del<br />
sistema è maggiore, eguale o minore del valore critico ccr prima citato.<br />
Se sul corpo considerato si suppone agente una forza eccitatrice F funzione del tempo secondo una legge<br />
sinusoidale del tipo:<br />
l’equazione <strong>di</strong> equilibrio alla traslazione si scrive:<br />
F = F0<br />
sin( ωt)<br />
m& x&<br />
+ cx&<br />
+ kx = F0<br />
sin( ωt)<br />
n<br />
pg_4
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
<strong>di</strong>videndo il tutto per m ed introducendo il fattore <strong>di</strong> smorzamento d e la pulsazione naturale ωn, l’equazione<br />
precedente <strong>di</strong>venta:<br />
se si considera che il rapporto F0/m si può scrivere:<br />
2 F0<br />
& x&<br />
+ 2ξ<br />
ωn<br />
x&<br />
+ ω n x = ⋅sin(<br />
ωt)<br />
m<br />
F0<br />
=<br />
m<br />
k<br />
m<br />
F<br />
k<br />
0<br />
il fattore ∆F0=F0/k, la cui <strong>di</strong>mensione è una lunghezza, corrisponde all’«allungamento che subirebbe la molla<br />
se la forza F agisce staticamente con il suo valore massimo F0»; con tale significato lo si può definire “∆<br />
statico”. Con tali posizioni, l’equazione <strong>di</strong>fferenziale del moto si può ricondurre nella forma:<br />
= ω<br />
2<br />
n<br />
∆F<br />
2 2<br />
& x& + 2ξ<br />
ω x&<br />
+ ω nx<br />
= ω n ∆F0<br />
sin(<br />
n ω<br />
La soluzione completa della equazione precedente sarà data dalla somma della risposta in transitorio (la<br />
soluzione della omogenea associata) e dalla risposta a regime (la soluzione particolare).<br />
Se si ipotizza per la soluzione particolare ancora una forma sinosoidale della stessa frequenza dell’azione<br />
forzante, la risposta completa sarà una forma del tipo:<br />
x = A<br />
1<br />
e<br />
α1t<br />
+ A<br />
2<br />
e<br />
α 2t<br />
0<br />
t)<br />
+ Xsin(<br />
ωt<br />
+ φ)<br />
Per quanto riguarda la risposta in transitorio la soluzione dell’equazione <strong>di</strong>fferenziale potra essere posta<br />
nella forma:<br />
x = A<br />
1<br />
e<br />
α 1t<br />
+<br />
dove A1 e A2 sono le costanti da determinare in base alle con<strong>di</strong>zioni iniziali, mentre α1 e α2 sono le ra<strong>di</strong>ci<br />
dell’equazione caratteristica:<br />
il <strong>di</strong>scriminante <strong>di</strong> questa equazione è:<br />
ξ<br />
α<br />
2<br />
2<br />
ω<br />
+<br />
2<br />
n<br />
A<br />
2<br />
e<br />
2<br />
2ξ ωn<br />
α + ω n<br />
− ω<br />
2<br />
n<br />
= ω<br />
α2t<br />
( 2 2<br />
n ξ<br />
la sua forma mette in evidenza come il numero ed il tipo delle ra<strong>di</strong>ci della equazione caratteristica <strong>di</strong>pendono<br />
dall’essere ξ maggiore, uguale o minore dell’unità: ossia c maggiore, uguale o minore del coefficiente <strong>di</strong><br />
smorzamento critico ccr.<br />
Per quel che concerne, invece, la risposta a regime la ricerca della soluzione particolare risulterà agevole se,<br />
ricordando che risulta:<br />
e t jω<br />
= 0<br />
−1)<br />
= cos( ωt)<br />
+ jsen(<br />
ωt)<br />
si pone che la forza eccitatrice esterna sia la parte reale <strong>di</strong> una forma complessa:<br />
F = F0e<br />
jωt<br />
pg_5
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
ne segue che anche per la soluzione particolare si può porre:<br />
partendo da tali pressupposti si avrà:<br />
x = X e<br />
j(<br />
ωt+<br />
ϕ)<br />
= X e<br />
x = X e<br />
jϕ<br />
e<br />
jωt<br />
x&<br />
= jω<br />
X e<br />
& x&<br />
= − ω<br />
quin<strong>di</strong> sostituendo nell’equazione <strong>di</strong>fferenziale del moto:<br />
si avrà<br />
X (<br />
2<br />
jωt<br />
X e<br />
jωt<br />
jωt<br />
= X e<br />
2 2<br />
& x& + 2d<br />
ω x&<br />
+ ω n x = ω n ∆F0<br />
sin(<br />
jωt<br />
n ω<br />
2<br />
2<br />
− ω + 2 jd<br />
ωnω<br />
+ ω n)<br />
e<br />
jωt<br />
= ω<br />
2<br />
n<br />
∆F<br />
semplificando e <strong>di</strong>videndo per ω 2 n e introducendo la definizione <strong>di</strong> frequenza ridotta<br />
da cui, razionalizzando, si ottiene:<br />
X = Xe<br />
jϕ<br />
in definitiva si può ricavare il modulo:<br />
e la fase:<br />
X =<br />
( 1−<br />
r<br />
2<br />
=<br />
∆F<br />
X ⎡( 1−<br />
r<br />
2<br />
) + j2<br />
ξ r⎤<br />
= ∆F<br />
⎢⎣<br />
⎥⎦<br />
2 [ ( 1 − r ) + j2<br />
ξ r]<br />
∆F0<br />
2<br />
) + ( 2ξ<br />
r)<br />
0<br />
2<br />
=<br />
( 1−<br />
r<br />
( 1 − r<br />
2<br />
)<br />
2<br />
2<br />
)<br />
∆F<br />
2<br />
+ ( 2ξ<br />
+<br />
⎛ 2ξ<br />
r<br />
= arctg ⎜−<br />
⎝ 1−<br />
r<br />
φ 2<br />
in definitiva, la soluzione particolare assumerà la forma:<br />
x =<br />
( 1−<br />
r<br />
2<br />
∆F<br />
)<br />
2<br />
0<br />
+ ( 2ξ<br />
r)<br />
2<br />
0<br />
( 2<br />
r)<br />
2<br />
⎞<br />
⎟<br />
⎠<br />
ξ<br />
0<br />
=<br />
r)<br />
2<br />
⋅<br />
t)<br />
0<br />
e<br />
jωt<br />
2 [ ( 1 − r ) − j2<br />
ξ r]<br />
( 1−<br />
r<br />
⋅ sin( ωt<br />
+ φ)<br />
2<br />
∆F<br />
)<br />
2<br />
0<br />
+ ( 2ξ<br />
ω f<br />
r = = si otterrà<br />
ωn<br />
fn<br />
a regime, quin<strong>di</strong>, l’ampiezza della risposta del sistema alla sollecitazione esterna, così come come lo<br />
sfasamento, <strong>di</strong>pende dal:<br />
- rapporto delle frequenze<br />
ω<br />
r = =<br />
ωn<br />
f<br />
fn<br />
r)<br />
2<br />
pg_6
- fattore <strong>di</strong> smorzamento<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
c<br />
ξ =<br />
ccr<br />
Se pren<strong>di</strong>amo in esame il seguente rapporto definito come “fattore <strong>di</strong> amplificazione”:<br />
x<br />
A =<br />
∆F<br />
=<br />
∆F<br />
0 2 2<br />
2<br />
( 1−<br />
r ) + ( 2 ξ r)<br />
il cui valore è un in<strong>di</strong>ce <strong>di</strong> comparazione <strong>di</strong> tale risposta con il ∆ statico. L’analisi dei punti caratteristici della<br />
funzione A ( r,<br />
ξ)<br />
ci <strong>di</strong>ce che:<br />
⎧A<br />
⎨<br />
⎩A<br />
( r,<br />
ξ)<br />
( r,<br />
ξ)<br />
= 1<br />
= 0<br />
per r = 0<br />
per r = ∞<br />
0<br />
in<strong>di</strong>pendentemente dal valore <strong>di</strong> ξ<br />
Figura 9<br />
Si fa notare che in corrispondenza <strong>di</strong> r=1, per il quale si A = ∞ , si verfica il cosidetto fenomeno della<br />
risonanza, definito come quella con<strong>di</strong>zione in cui la risposta del sistema si esalta tendendo ad un’ampiezza<br />
<strong>di</strong> valore infinito; quin<strong>di</strong> nel caso la frequenza forzante fc raggiunga il valore della frequenza <strong>di</strong> vibrazione<br />
propria fn si ha la con<strong>di</strong>zione <strong>di</strong> risonanza, cui corrisponde un’amplificazione dell’ampiezza del moto che può<br />
compromettere l’integrità del sistema vibrante.<br />
pg_7
Isolamento <strong>dalle</strong> Vibrazioni<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
Un qualsiasi sistema reale è, nella maggior parte dei casi, un sistema vincolato ad un telaio e quin<strong>di</strong><br />
all'ambiente circostante esterno. Se un siffatto sistema è soggetto a <strong>vibrazioni</strong> queste risulteranno<br />
trasmesse, attraverso i vincoli, a detto ambiente; e ciò è generalmente causa <strong>di</strong> <strong>di</strong>sturbo. Premesso che è<br />
ovviamente impossibile pensare <strong>di</strong> poter eliminare del tutto tale circostanza, il problema dell'<strong>isolamento</strong> <strong>dalle</strong><br />
<strong>vibrazioni</strong> indotte da un sistema vibrante deve essere visto come il tentativo <strong>di</strong> ridurre il più possibile<br />
l'intensità delle forze trasmesse dal sistema al basamento intervenendo, per quanto tecnicamente possibile,<br />
sui valori dei parametri che caratterizzano il sistema ammortizzante o antivibrante (costituito da molle e<br />
smorzatori <strong>di</strong> tipo viscoso).<br />
Figura 10<br />
In ambito tecnico, la bontà del risultato dell’<strong>isolamento</strong> può essere valutata attraverso il valore assunto da un<br />
parametro specifico detto coefficiente <strong>di</strong> trasmissibilità T definito come il rapporto fra il valore massimo della<br />
forza trasmessa al basamento ed il valore massimo della forza eccitatrice esterna. Al fine <strong>di</strong> determinare il<br />
coefficiente citato, si prenda in esame lo schema <strong>di</strong> fig.11 e si ipotizzi che sul corpo vibrante agisca una<br />
forza eccitante esterna F funzione del tempo secondo una legge sinusoidale del tipo Fo sin(ωt) e che a<br />
regime il corpo sia soggetto ad un moto del tipo:<br />
x = X sin ( ωt<br />
+ φ)<br />
Figura 11<br />
La risultante delle forze agenti sul basamento FT sarà la somma <strong>di</strong> quella trasmessa dalla massa vibrante<br />
attraverso le molle e quella trasmessa attraverso lo smorzatore.<br />
Possiamo scrivere quin<strong>di</strong>:<br />
F T<br />
= c x&<br />
+ kx<br />
pg_8
Se <strong>di</strong>vi<strong>di</strong>amo per k, abbiamo:<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
FT c<br />
= x&<br />
+<br />
m m<br />
ricordando le definizioni <strong>di</strong> fattore <strong>di</strong> smorzamento ξ e <strong>di</strong> pulsazione naturale del sistema ωn, si ricava:<br />
possiamo scrivere ancora:<br />
F<br />
k<br />
T<br />
F<br />
k<br />
T<br />
k<br />
m<br />
k<br />
m<br />
k<br />
m<br />
x<br />
FT<br />
2<br />
= ω n = 2ξ<br />
ωn<br />
x&<br />
+ ω<br />
k<br />
FT<br />
2<br />
= ω n = 2ξ<br />
ωn<br />
x&<br />
+ ω<br />
k<br />
Se sostituiamo in questa espressione quella <strong>di</strong> x e dx/dt che si ricavano dalla legge del moto ipotizzata, si<br />
ottiene:<br />
FT<br />
ω<br />
k<br />
2<br />
n<br />
= X<br />
2<br />
n<br />
2<br />
n<br />
2 [ ω n sin( ωt<br />
+ φ)<br />
+ 2 ξ ωn<br />
ωcos(<br />
ωt<br />
+ φ)<br />
]<br />
Introducendo la frequenza ridotta r=ω/ωn e <strong>di</strong>videndo il tutto per ω 2 n si ottiene:<br />
FT<br />
k<br />
= X<br />
[ sin( ωt<br />
+ φ)<br />
+ 2 ξ r cos( ωt<br />
+ φ)<br />
]<br />
Da tale relazione si evince che la forza complessiva trasmessa al basamento è costituita da due componenti<br />
in quadratura: la reazione della molla, infatti, è massima quando la velocità è nulla (ed è massimo lo<br />
spostamento), mentre la resistenza viscosa è massima quando è massima la velocità (ed è nullo lo<br />
spostamento). La somma <strong>di</strong> queste due componenti darà:<br />
FT 2<br />
k<br />
= X<br />
con β dato dalla somma algebrica delle fasi:<br />
1+<br />
( 2ξ<br />
r)<br />
β = φ +<br />
Se ripren<strong>di</strong>amo l’espressione FT/k vista in precedenza:<br />
F<br />
k<br />
T<br />
= X<br />
arctg( 2ξ<br />
r)<br />
1+<br />
( 2ξ<br />
r)<br />
x<br />
x<br />
sin( ωt<br />
+ β)<br />
ricordando che il modulo X nel caso <strong>di</strong> azione forzante sinusoidale in presenza <strong>di</strong> <strong>vibrazioni</strong> forzate con<br />
smorzamento viscoso:<br />
X =<br />
Il valore max <strong>di</strong> FT assumera l’espressione:<br />
( 1−<br />
r<br />
2<br />
∆F<br />
)<br />
2<br />
0<br />
2<br />
+ ( 2ξ<br />
r)<br />
2<br />
pg_9
dalla quale si ricava:<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
F<br />
k<br />
T<br />
= ∆F0<br />
⋅<br />
FT<br />
1<br />
=<br />
k ∆F0<br />
( 1<br />
( 1<br />
−<br />
−<br />
1+<br />
( 2ξ<br />
r)<br />
2<br />
r<br />
2<br />
)<br />
2<br />
r<br />
2<br />
)<br />
2<br />
+ ( 2ξ<br />
r)<br />
2<br />
1+<br />
( 2ξr)<br />
2<br />
+ ( 2ξr)<br />
2<br />
infine considerando che ∆F0=F0/k e che il valore max <strong>di</strong> FT/F0 vale:<br />
( FT)<br />
F<br />
0<br />
max<br />
( FT)<br />
=<br />
k<br />
max<br />
k<br />
F<br />
0<br />
( FT)<br />
=<br />
k<br />
A questo punto si può ricavare la trasmissibilità T data dal rapporto:<br />
ovvero in forma estesa<br />
( FT)<br />
T =<br />
F<br />
T =<br />
0<br />
max<br />
=<br />
max<br />
1<br />
∆F<br />
2<br />
1+<br />
( 2ξ<br />
r)<br />
2 2<br />
( 1−<br />
r ) + ( 2ξ<br />
r)<br />
⎛ ω ⎞<br />
1+<br />
⎜2<br />
ξ ⎟<br />
⎝ ωn<br />
⎠<br />
2 ⎡ ⎛ ω ⎞ ⎤<br />
⎢1<br />
− ⎜ ⎟ ⎥<br />
⎢⎣<br />
⎝ ωn<br />
⎠ ⎥⎦<br />
2<br />
2<br />
⎛ ω ⎞<br />
+ ⎜2<br />
ξ ⎟<br />
⎝ ωn<br />
⎠<br />
Tale grandezza, come già accennato, rapporta l’ampiezza della forza trasmessa dall’antivibrante alla<br />
fondazione (FT) con l’ampiezza della forza che sarebbe trasmessa alla fondazione senza l’interposizione del<br />
sistema antivibrante (F0).<br />
La figura 12 riporta il <strong>di</strong>agramma della trasmissibilità T in funzione del rapporto tra le frequenze r al variare<br />
del fattore <strong>di</strong> smorzamento ξ.<br />
Si deve far notare che in<strong>di</strong>pendentemente al valore <strong>di</strong> ξ il valore T è sempre pari all’unità per :<br />
- per r = 2 = 1,<br />
41<br />
ω f<br />
- per r = = = 0<br />
ωn<br />
fn<br />
ω f<br />
E per r = = = ∞ la tramissibilità T → 0.<br />
ωn<br />
fn<br />
2<br />
2<br />
0<br />
pg_10
Inoltre per:<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
Figura 12<br />
f<br />
- < 2 → T è sempre maggiore <strong>di</strong> 1 e per ξ che tende a zero si verifica il fenomeno della risonanza,<br />
fn<br />
ossia il massimo valore <strong>di</strong> trasmissibilità, che risulta tanto più accentuato quanto minore risulta il fattore <strong>di</strong><br />
smorzamento ξ.<br />
f<br />
- > 2 → T è sempre minore <strong>di</strong> 1 per qualsiasi valore del fattore <strong>di</strong> smorzamento ξ e pertanto le<br />
fn<br />
<strong>vibrazioni</strong> risultano attenuate.<br />
Riassumendo, la trasmissibilità T risulta amplificata per r1,41 la trasmissibilità T <strong>di</strong>minuisce traducendosi in un effetto positivo nell’<strong>isolamento</strong> per la riduzione della<br />
forza trasmessa FT al basamento.<br />
Figura 13 - Curva della trasmissibilità T per ξ=0<br />
pg_11
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
In termini <strong>di</strong> frequenze, considerando i valori che assume la trasmissibilità, si può notare che per frequenze<br />
molto basse f/fn→0 , alla struttura <strong>di</strong> sostegno viene trasmessa una forza <strong>di</strong> intensità pari a quella che<br />
agisce sulla macchina. All’aumentare della frequenza della forza eccitante aumenta la forza trasmessa al<br />
basamento, che <strong>di</strong>venta infinitamente grande per f=fn. Per frequenze superiori alla frequenza naturale la<br />
forza trasmessa decresce rapidamente raggiungendo il valore della forza impressa in corrispondenza della<br />
frequenza f = 2 fn per decrescere ancora all’aumentare della frequenza forzante o eccitante. Quest’ultima<br />
zona è quella considerato utile il funzionamento dell’isolatore.<br />
In altre parole, tenendo presente quanto visto circa il fattore T, è possibile affermare che il principio base<br />
dell’<strong>isolamento</strong> consiste nello scegliere un’elemento visco-elastico tale che la frequenza propria del sistema<br />
macchina-elemento antivibrante (fn) risulti inferiore della più bassa frequenza componente lo spettro della<br />
macchina (f).<br />
Figura 14 – (frequency ratio=r)<br />
Si parla <strong>di</strong> <strong>isolamento</strong> attivo quando isoliamo la macchina che genera il <strong>di</strong>sturbo, <strong>di</strong> <strong>isolamento</strong> passivo<br />
quando si provvede ad isolare il sistema o l’elemento che subisce il <strong>di</strong>sturbo dato <strong>dalle</strong> <strong>vibrazioni</strong>.<br />
I <strong>di</strong>spositivi antivibranti elastici<br />
A titolo <strong>di</strong> esempio si prenda in esame un sistema antivibrante costituito da supporto a molla, in tal caso si<br />
può assumere il coefficiente <strong>di</strong> smorzamento c=0, o analogamente che c sia molto piccolo rispetto alla<br />
caratteristica elastica della molla e pertanto trascurarne il contributo (c
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
In tal caso ricordando che la trasmissibilità T, scritta in forma estesa, vale:<br />
( FT)<br />
T =<br />
F<br />
0<br />
max<br />
=<br />
⎛<br />
1+<br />
⎜<br />
⎝<br />
2 ⎡ ⎛ ω ⎞ ⎤<br />
⎢1<br />
− ⎜ ⎟ ⎥<br />
⎢⎣<br />
⎝ ωn<br />
⎠ ⎥⎦<br />
2<br />
c ω ⎞<br />
⋅ ⎟<br />
k ⋅ m ωn<br />
⎠<br />
⎛<br />
+ ⎜2<br />
⋅<br />
⎝<br />
che nell’ipotesi c
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
variabile con legge quadratica della fn) che a sua volta consente, a parità <strong>di</strong> f, <strong>di</strong> incrementare il rapporto <strong>di</strong><br />
riduzione r=f/fn che, per i valori r>1,41, permette una riduzione della trasmissibilità T.<br />
Quella maggiormente significativa è la relazione per la quale la lettura dell’allungamento della molla sotto<br />
l’azione del solo peso P (in con<strong>di</strong>zioni statiche) è sufficiente per la determinazione della frequenza naturale<br />
del sistema fn. Infatti, sostituendo i valori numerici, si può ricavare che la freccia statica ∆s (espressa in<br />
millimetri) relativa alla molla compressa è legata alla frequenza propria fn (Hz) del sistema vibrante<br />
attraverso la semplice relazione:<br />
fn =<br />
15,<br />
8<br />
Da notare che tale relazione è valida in con<strong>di</strong>zioni <strong>di</strong> comportamento elastico-lineare e che il materiale<br />
dell'isolante possieda lo stesso tipo <strong>di</strong> elasticità sia nelle circostanze statiche che <strong>di</strong>namiche.<br />
In figura 15 si è rappresentata graficamente la relazione tra la frequenza propria fn (in s -1 ) e l’abbassamento<br />
statico ∆s (in cm o inch) per tale sistema lineare ad un grado <strong>di</strong> libertà.<br />
∆s<br />
Figura 16<br />
È evidente che la scelta <strong>di</strong> supporti antivibranti con valori <strong>di</strong> deflessione statica consistenti permette una forte<br />
riduzione della frequenza naturale fn e pertanto, a parità <strong>di</strong> azione forzante esterna f, e <strong>di</strong> conseguenza<br />
l’abbattimento della trasmissibilità del sistema T.<br />
Nel caso le frequenze siano espresse in cicli al minuto (si ricorda che 1Hz=60cpm), me<strong>di</strong>ante il<br />
nomogramma in scala logaritmica <strong>di</strong> fig.17 è consentita la determinazione della deflessione statica ∆s (in<br />
mm) e, nota la frequenza forzante f (in cpm), la trasmissibilità T(%); tali parametri sono correlati dalla:<br />
∆<br />
15,<br />
8 ⎛ 1+<br />
T ⎞<br />
= ⋅ ⎜ ⎟<br />
f ⎝ T ⎠<br />
s 2<br />
nella quale ∆s è espressa in mm e la frequenza forzante f (o <strong>di</strong> <strong>di</strong>sturbo) in Hz.<br />
pg_14
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
Figura 17 – trasmissibilità vs. frequenze (per ξ=0)<br />
La trasmissibilità T, equivalentemente, può essere valutata, nota la freccia statica della molla (in mm)<br />
conseguente il carico incidente e la frequenza forzante f (Hz) , adoperando la relazione:<br />
=<br />
1<br />
T 2<br />
⎛ f ∆s<br />
⎜<br />
⎝ 15,<br />
8<br />
È opportuno informare il lettore che in quest’ambito potrà trovare, invece che la trasmissibilità T, il<br />
complemento a 100 della stessa che rappresenta l’<strong>isolamento</strong> percentuale I (%):<br />
ovvero<br />
⎞<br />
⎟<br />
⎠<br />
−1<br />
I (%) = ( 1−<br />
T)<br />
⋅100%<br />
( f fn)<br />
( f fn)<br />
2<br />
I = 2<br />
− 2<br />
⋅100%<br />
−1<br />
pg_15
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
In ambito tecnico è considerato un buon <strong>isolamento</strong> quello superiore all’80%.<br />
Figura 18 – <strong>isolamento</strong> vs frequenze (per ξ=0)<br />
Dall’esame <strong>di</strong> figura 18 è possibile riscontrare che intersecando i valori <strong>di</strong> frequenza forzante f con le linee<br />
dell’<strong>isolamento</strong> I (%), in<strong>di</strong>vidua il valore della frequenza naturale fn (ascissa) del sistema necessario per<br />
realizzare l'<strong>isolamento</strong> richiesto. È evidente che il decremento della frequenza propria fn corrisponde, a<br />
parità <strong>di</strong> frequenza forzante f, ad un incremento dell’<strong>isolamento</strong> I del sistema vibrante.<br />
Nella pratica applicativa:<br />
per ottenere con<strong>di</strong>zioni <strong>di</strong> <strong>isolamento</strong> non particolari (normali) sono raccomandati valori <strong>di</strong> fn compresi tra<br />
1/3·f
Sistemi antivibranti<br />
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
I <strong>di</strong>spositivi antivibranti più utilizzati sono costituiti da molle in acciaio, gomma e materiale plastico, sughero,<br />
feltro, fibre <strong>di</strong> vetro compatte, etc.<br />
Le molle metalliche sono usate spesso come isolatori <strong>di</strong> <strong>vibrazioni</strong> in quanto oltre i vantaggi legati alla<br />
resistenza meccanica consentono <strong>di</strong> risolvere problemi <strong>di</strong> <strong>isolamento</strong> a qualsiasi frequenza, perchè con<br />
questi <strong>di</strong>spositivi è possibile ottenere un vasto campo <strong>di</strong> deflessioni statiche cambiando la tipologia <strong>di</strong><br />
materiale impiegato per la costruzoine e il loro <strong>di</strong>mensionamento. Le molle avvolte ad elica presentano<br />
frequenze proprie <strong>di</strong> vibrazione modeste a causa della loro notevole proprietà <strong>di</strong> deformabilità assiale<br />
(fig.19).<br />
Figura 19<br />
Il materiale elastomerico come ad esempio la gomma si presta bene all’<strong>isolamento</strong> <strong>di</strong> macchine ed<br />
apparecchiature meccaniche nel caso sia necessario raggiungere un valore consistente dello smorzamento<br />
viscoso. I supporti antivibranti in gomma si basano sul principio che l’energia prodotta dalla vibrazione può<br />
essere <strong>di</strong>ssipata accoppiando l’elasticità del materiale alle caratteristiche <strong>di</strong> smorzamento <strong>di</strong> tipo isteretico<br />
che <strong>di</strong>ssipa una parte dell’energia accumulata sotto forma <strong>di</strong> calore. L’efficienza e la durata <strong>di</strong> tali <strong>di</strong>spositivi<br />
è fortemente compromessa in presenza <strong>di</strong> aci<strong>di</strong> o altri materiali corrosivi; nel caso delle gomme, la sensibilità<br />
alla luce, può favorire il fenomeno dell’invecchiamento che porta ad una deca<strong>di</strong>mento delle loro<br />
caratteristiche meccaniche. Valori tipici del fattore <strong>di</strong> smorzamento ξ sono dell’or<strong>di</strong>ne del 5%.<br />
Figura 20<br />
Il sughero che rappresenta uno dei primi materiali impiegati per l’<strong>isolamento</strong> <strong>dalle</strong> <strong>vibrazioni</strong>; gli isolatori <strong>di</strong><br />
tale tipo lavorano prevalentemente a compressione. Tale materiale non è in grado <strong>di</strong> fornire gran<strong>di</strong><br />
deflessioni statiche e quin<strong>di</strong> non è utile installarlo per impieghi in presenza <strong>di</strong> frequenza naturale <strong>di</strong> modesta<br />
entità, vale a <strong>di</strong>re per fn inferiori a 10 Hz. Valori tipici del fattore <strong>di</strong> smorzamento ξ sono dell’or<strong>di</strong>ne del 6%.<br />
Figura 21<br />
pg_17
Corso <strong>di</strong> Organizzazione e Gestione della Sicurezza Aziendale<br />
Il feltro ha forti caratteristiche <strong>di</strong> smorzamento che lo rende particolarmente adatto nel ridurre l’ampiezza<br />
delle <strong>vibrazioni</strong> quando si prevede che il sistema possa essere soggetto a risonanza (fig.22). Tale materiale<br />
presenta fattori <strong>di</strong> smorzamento ξ prossimi a quelli del sughero.<br />
Figura 22<br />
Normalmente è possibile ricorrere a soluzioni semplici attraverso l’<strong>isolamento</strong> della macchina me<strong>di</strong>ante l’uso<br />
<strong>di</strong> supporti antivibranti (fig.22)<br />
Figura 23<br />
ovvero me<strong>di</strong>ante l’ancoraggio della macchina ad una massa notevole (fig.23). Quest’ultima soluzione è<br />
ottenuta aggiungendo una massa m' alla macchina e isolando il sistema complessivo (macchina+massa<br />
aggiunta m').<br />
Figura 24<br />
Per un effettivo <strong>isolamento</strong> antivibrante è necessario che:<br />
gli isolatori siano installati simmetricamente rispetto al moto del baricentro;<br />
il centro <strong>di</strong> gravità risulti il più basso possibile al fine <strong>di</strong> evitare instabilità del sistema.<br />
Le macchine caratterizzate da urti e <strong>vibrazioni</strong> <strong>di</strong> notevole entità (i.e. gran<strong>di</strong> presse, rotative, etc.) richiedono<br />
oltre all’impiego <strong>di</strong> sospensioni antivibranti anche la realizzazione <strong>di</strong> fondazioni atte a ridurre la trasmissione<br />
delle sollecitazioni della macchina al pavimento, al fabbricato ed agli e<strong>di</strong>fici circostanti.<br />
pg_18