

Moto relativo traslatorio: Appunti (pdf, it, 29 KB, 4/3/12)
Moto relativo traslatorio: Appunti (pdf, it, 29 KB, 4/3/12)
Moto relativo traslatorio: Appunti (pdf, it, 29 KB, 4/3/12)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
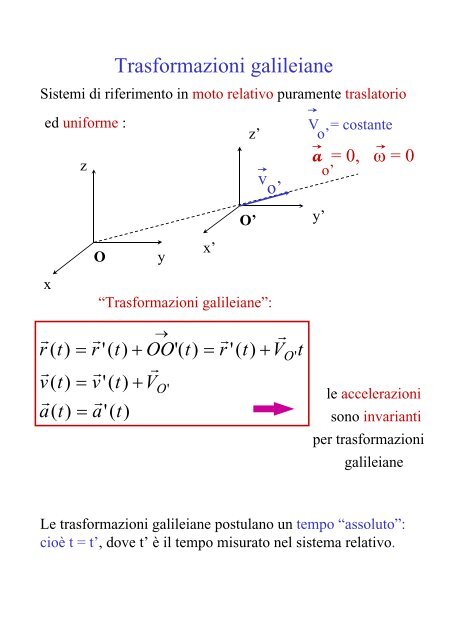
Sistemi di riferimento in moto <strong>relativo</strong> puramente <strong>traslatorio</strong><br />
ed uniforme :<br />
x<br />
z<br />
O<br />
Trasformazioni galileiane<br />
y<br />
x’<br />
z’<br />
O’<br />
v o’<br />
“Trasformazioni galileiane”:<br />
r r → r r<br />
r() t = r'() t + OO'() t = r'() t + VO't r r r<br />
vt () = v'() t + VO'<br />
r r<br />
at () = a'() t<br />
V = costante<br />
o’<br />
a = 0, ω = 0<br />
o’<br />
y’<br />
le accelerazioni<br />
sono invarianti<br />
per trasformazioni<br />
galileiane<br />
Le trasformazioni galileiane postulano un tempo “assoluto”:<br />
cioè t = t’, dove t’ è il tempo misurato nel sistema <strong>relativo</strong>.
Scegliendo uno degli assi coordinati parallelo alla veloc<strong>it</strong>à<br />
relativa di traslazione : x, x ’ // V O’<br />
y<br />
z<br />
O x<br />
r r r<br />
r() t = r'() t + V t<br />
r r r<br />
vt () = v'() t + V<br />
r r<br />
at () = a'() t<br />
Trasformazioni galileiane<br />
O'<br />
O'<br />
r<br />
y’<br />
z’<br />
⇒<br />
⇒<br />
⇒<br />
O’<br />
r’<br />
v o’<br />
P<br />
x’<br />
xt () = x'() t + VO't yt () = y'() t<br />
zt () = z'() t<br />
v () t = v' () t + V<br />
v () t = v' () t<br />
x x O'<br />
y y<br />
v () t = v' () t<br />
z z<br />
ax() t = a' x () t<br />
a () t = a' () t<br />
y y<br />
a () t = a' () t<br />
z z













