PARTE VII AMPLIFICATORI LINEARI - Fisica - Sapienza
PARTE VII AMPLIFICATORI LINEARI - Fisica - Sapienza
PARTE VII AMPLIFICATORI LINEARI - Fisica - Sapienza

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>PARTE</strong> <strong>VII</strong><br />
<strong>AMPLIFICATORI</strong> <strong>LINEARI</strong><br />
1. Generalità<br />
I parametri fondamentali di un amplificatore sono il guadagno in tensione (cioè la funzione<br />
di trasferimento), che qui indichiamo con il simbolo A(s), l'impedenza d'ingresso Z in (s) e<br />
l'impedenza d'uscita Z o (s). Nel caso degli amplificatori, infatti, si considerano generalmente solo<br />
questi tre parametri, dei quattro necessari a caratterizzare compiutamente una rete due porte (vedi<br />
Parte V), dal momento che assai spesso l'influenza del circuito d'uscita su quello d'ingresso può<br />
venire trascurata. E<br />
quindi l'impedenza<br />
d'ingresso si assume in<br />
genere indipendente da<br />
quella del carico, l'impedenza d'uscita da quella della sorgente 1 .<br />
Il modello di un amplificatore ideale si riduce a un generatore controllato ideale: un<br />
generatore di tensione controllato in tensione, dato che ci stiamo occupando di amplificatori di<br />
tensione. Questo significa assumere che il guadagno sia una costante reale (indipendente dalla<br />
frequenza), che l'impedenza d'ingresso sia infinita e che l'impedenza d'uscita sia nulla: tutte<br />
condizioni certamente irrealizzabili.<br />
Ai fini pratici risulta peraltro spesso soddisfacente, come ottima approssimazione di un<br />
amplificatore ideale, cosiderare un amplificatore che abbia guadagno indipendente dalla frequenza<br />
nella regione delle frequenze di interesse, impedenza d'ingresso molto più alta di quella delle<br />
sorgenti che si prevede di utilizzare e, se non si tratta di un amplificatore di potenza, impedenza<br />
d'uscita molto più bassa di quella dei carichi a cui s'intende collegarlo.<br />
Dei tre parametri menzionati prima, il più importante è evidentemente l'amplificazione,<br />
d’altronde essenziale perchè un amplificatore possa venir chiamato tale. In ordine d'importanza<br />
(cioè di attenzione) segue poi l'impedenza d'ingresso, anche perchè generalmente risulta più difficile<br />
ottenere che essa sia molto maggiore dell'impedenza della sorgente (che può essere costituita da un<br />
1 Queste assunzioni, naturalmente, non sempre sono ben verificate. Esse non sono valide in molti amplificatori a un solo<br />
stadio (un esempio immediato è il circuito inseguitore d'emettitore). Ma anche nel caso degli amplificatori a più stadi<br />
può essere necessario impiegare cautela. Si pensi all'effetto di una capacità parassita, anche di valore molto piccolo, fra<br />
l'ingresso e l'uscita di un amplificatore ad alto guadagno.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
1
ivelatore o da un trasduttore di caratteristiche particolari) di quanto non sia invece ottenere che<br />
l'impedenza d'uscita risulti trascurabile rispetto a quella del carico (che spesso può essere scelto con<br />
maggior libertà e che inoltre può venire opportunamente adattato).<br />
Si verifica spesso in pratica, sopratutto negli amplificatori dotati di banda passante<br />
relativamente estesa, che l'amplificazione possa venire espressa nella forma seguente:<br />
(1) A(s) = A o B(s) L(s)<br />
decomponendola cioè nel prodotto di una costante reale A o che rappresenta il guadagno (in continua<br />
o a centrobanda), e di due funzioni di s espresse in forma normalizzata: B(s), che caratterizza la<br />
risposta dell'amplificatore ai tempi brevi (alte frequenze), ed L(s) che ne caratterizza la risposta ai<br />
tempi lunghi (basse frequenze). Si noti peraltro che negli amplificatori "in continua", che non<br />
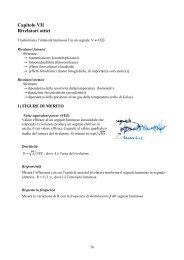
presentano tagli a bassa frequenza, si ha L(s)=1. In pratica la decomposizione (1) è significativa<br />
soltanto se i poli e gli zeri della A(s) possono venire raggruppati nel piano complesso in due<br />
"nuvole" ben separate fra loro: una prossima all'origine e un’altra ben distante dalla prima, come<br />
mostrato nella figura. Questo discorso corrisponde alla nozione intuitiva di un amplificatore che ha<br />
guadagno costante in una estesa regione di frequenza, presentando poi tagli sia alle basse che alle<br />
alte frequenze (vedi Esempio a pag. 16 della Parte IV, nel caso in cui si ha 1 >> 2 ).<br />
Quanto più distano fra loro le due "nuvole" di singolarità, tanto più la decomposizione (1) è<br />
significativa nel senso che la risposta ai tempi brevi è determinata soltanto dalla B(s) (cioè la L(s)<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
2
ha effetto trascurabile su essa) mentre la risposta ai tempi lunghi è determinata soltanto dalla L(s)<br />
(cioè la B(s) ha effetto trascurabile su essa).<br />
RISPOSTA AI TEMPI BREVI<br />
2. Calcolo dei tempi caratteristici<br />
Come si è detto, la risposta ai tempi brevi (ad alta frequenza) di un amplificatore è<br />
determinata essenzialmente dalla funzione B(s). Da essa si ricavano la risposta impulsiva e la<br />
risposta indiciale corrispondenti:<br />
b(t)=L -1 [B(s)] ; b u (t)=L -1 [B(s)/s]<br />
Ma per caratterizzare la risposta ai tempi brevi di un amplificatore è spesso sufficiente<br />
calcolarne il tempo di salita e il ritardo, in alternativa alla determinazione degli andamenti<br />
dettagliati delle risposte nel dominio del tempo, che richiedono calcoli di antitrasformazione.<br />
Vogliamo ricavare pertanto delle relazioni generali, sebbene approssimate, che permettano<br />
di calcolare i tempi caratteristici della risposta indiciale quando si conosca la funzione B(s), in<br />
alternativa alle valutazioni dei tempi caratteristici empirici presentate nella Parte I 2 . Consideriamo<br />
qui il ritardo e il tempo di salita , espressi in forma analitica, che abbiamo introdotto nella Parte I<br />
e che richiamiamo qui con riferimento alla risposta impulsiva ai tempi brevi b(t)<br />
(2) <br />
<br />
<br />
<br />
0<br />
tb t dt<br />
<br />
(3) <br />
<br />
<br />
2 2<br />
2 t b t dt <br />
0<br />
<br />
Ricordiamo che queste espressioni sono valide soltanto se la risposta impulsiva è espressa in<br />
forma normalizzata, come è certamente vero per la b(t) per come la B(s) è stata definita nella (1), e<br />
2 Ricordiamo che nella Parte I è stata ricavata la seguente relazione esatta fra il tempo di salita empirico t r e la larghezza<br />
di banda B (a -3 dB) per un sistema del primo ordine: B t r = 0,3497... 0,35. Abbiamo anche visto che questa relazione<br />
è valida, in prima approssimazione, anche per altri tipi di funzioni di trasferimento, ma con valori del prodotto B t r che<br />
sono generalmente compresi fra 0,3 e 0,45.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
3
se la risposta indiciale b u (t) presenta andamento monotono crescente (almeno<br />
approssimativamente).<br />
Esprimiamo la B(s) nella seguente forma approssimata<br />
2<br />
s<br />
B s st b t dt<br />
0 b t dt s<br />
0 tb t dt t b t dt<br />
0<br />
2<br />
0<br />
<br />
2<br />
(4) exp <br />
ottenuta sviluppando in serie il fattore esponenziale e arrestando lo sviluppo al termine di secondo<br />
grado in s. Questa, utilizzando le espressioni (2) e (3), assume la forma:<br />
(5) Bs<br />
2 2<br />
s 2 <br />
1s <br />
<br />
2 2<br />
<br />
Consideriamo ora la B(s), espressa come rapporto di polinomi in s, approssimandola arrestandoci ai<br />
termini di secondo grado in s<br />
(6) Bs<br />
1 s s 1<br />
s <br />
<br />
s<br />
<br />
1 1<br />
<br />
<br />
2 2<br />
1 2 1 2<br />
<br />
2 2<br />
1 s 2 s 1 s 2<br />
s<br />
Da questa, usando l'ulteriore approssimazione 1/(1+) 1 - + , si ottiene la seguente espressione<br />
approssimata di B(s):<br />
(7) B(s) 1+( 1 - 1 )s +( 2 - 1 1 + 1 2 - 2 )s 2<br />
Le relazioni desiderate fra i tempi caratteristici e i coefficienti della B(s) si ottengono infine<br />
uguagliando le due espressioni (5) e (7):<br />
(8) 1 1<br />
(9) 2 2 2<br />
2 <br />
<br />
<br />
1 1 2 2<br />
<br />
<br />
Si nota che queste relazioni vanno utilizzate con cautela, dato che sono state ottenute attraverso<br />
varie approssimazioni.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
4
Esempio 1. Funzione passabasso del primo ordine.<br />
Essendo B(s) = 1/(1+s), i coefficienti valgono:<br />
1 = 0 ; 2 = 0 ; 1 = τ ; 2 = 0<br />
Si ha pertanto: = ; = <br />
Esempio 2. Funzione passabasso del secondo ordine, con poli reali.<br />
Qui abbiamo<br />
<br />
B s<br />
<br />
1 1<br />
<br />
2<br />
1 s1 s 1 s s<br />
1 2 1 2 1 2<br />
e i coefficienti valgono<br />
1 = 0 ; 2 = 0 ; 1 = 1 + 2 ; 2 = 1 2<br />
Si ha pertanto: = ; = <br />
Confrontando i risultati dei due Esempi si osserva subito che i ritardi si compongono<br />
linearmente, mentre i tempi di salita si compongono quadraticamente.<br />
Esempio 3. Impedenza di un circuito RC, con induttore L in serie al resistore per allargare la<br />
banda.<br />
1<br />
s<br />
<br />
1 s s<br />
Ponendo = L/R²C, abbiamo la funzione normalizzata <br />
2 2<br />
e i coefficienti valgono<br />
1 = ; 2 = 0 ; 1 = ; 2 = 2<br />
Si ha pertanto: = (1-) ; = [2(1-2-²)] ½<br />
Qui, al crescere di , entrambi i parametri e vengono ad assumere valori negativi, cosa<br />
evidentemente assurda. Il fatto è che in questo circuito al crescere di , cioè dell'induttanza L, la<br />
risposta indiciale diviene oscillante e allora le definizioni (2) e (3) non sono più applicabili 3 (il<br />
limite si ha per = 0.25).<br />
B s<br />
3<br />
Precisiamo ancora che il calcolo presentato nell’Esempio 3 è comunque approssimato. L’analisi esatta va svolta<br />
antitrasformando la funzione B(s)/s e studiando i parametri caratteristici (tempo di salita, ritardo e sovraelongazione)<br />
della risposta indiciale nel dominio del tempo al variare del parametro .<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
5
Esempio 4. Funzione con un polo e uno zero reali.<br />
Consideriamo la funzione<br />
<br />
B s<br />
1<br />
s<br />
<br />
1<br />
s<br />
con < 1, per cui i coefficienti valgono:<br />
1 = ; 2 = 0 ; 1 = ; 2 = 0<br />
Si ha pertanto: = (1-) ; = [2(1-)] ½<br />
I tempi caratteristici diminuiscono all'aumentare di , fino ad annullarsi per = 1, cioè quando lo<br />
zero cancella il polo e B(s) = 1.<br />
Esempio 5. Funzione passabasso del secondo ordine, espressa nella forma standard dei sistemi<br />
risonanti.<br />
Consideriamo la funzione (diversa da quella dell’Esempio 2 perchè per Q > 0,5 i poli sono<br />
1<br />
s Q s Q<br />
complessi): Bs 2 2 2<br />
1<br />
o o<br />
I coefficienti valgono<br />
1 = 0 ; 2 = 0 ; 1 = 1/ o Q ; 2 = 1/ o ²<br />
Si ha pertanto: = 1/ o Q ; = [2(1/Q²-2)] ½ / o<br />
I tempi caratteristici diminuiscono all'aumentare di Q, ma, come nell'Esempio 3, non ha senso<br />
calcolarli oltre un certo limite, che è fissato dal massimo valore di Q oltre il quale la risposta<br />
indiciale diviene oscillante.<br />
Esercizio 1. Ricavare le espressioni della risposta impulsiva e della risposta indiciale del sistema considerato<br />
nell’Esempio 4. Calcolare il ritardo per = 1 s e per i seguenti valori di : 0, 0.1, 0.2, 0.5, a) utilizzando la relazione<br />
esatta (2); b) utilizzando la relazione approssimata (8). Ripetere i calcoli precedenti utilizzando la definizione empirica<br />
del ritardo t d (50% del valore finale della risposta indiciale), supponendo che questa grandezza dipenda da allo stesso<br />
modo di . Presentare i risultati in una tabella.<br />
Esercizio 2. Spiegare per quale motivo nell’Esempio 4 non ha senso considerare il caso <br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
6
3. Amplificatori a larga banda<br />
Uno stadio amplificatore di tensione è costituito fondamentalmente da un dispositivo attivo<br />
e da un carico. Molti dispositivi attivi (ma i transistori bipolari solo in prima approssimazione) sono<br />
riconducibili in modo significativo al modello (per piccoli segnali) rappresentato da un generatore<br />
ideale di corrente, controllato dalla tensione d'ingresso, mentre il carico (al quale generalmente<br />
contribuisce anche l'impedenza d'ingresso dello stadio<br />
successivo) è costituito da una opportuna impedenza Z, in<br />
parallelo alla quale vi è però sempre una capacità C (capacità<br />
d'uscita del dispositivo, capacità parassite, ecc.).<br />
Se il carico è resistivo (Z = R) si ha evidentemente<br />
l’amplificazione A 0 = g m R, dove g m è la transconduttanza del dispositivo attivo, mentre la costante<br />
di tempo = RC determina la velocità di risposta e la banda passante (B = 1/2). Si conclude che il<br />
prodotto banda-guadagno<br />
(10) A 0 B = g m /2C<br />
è indipendente dalla resistenza R e dipende soltanto dal rapporto fra la transconduttanza g m e la<br />
capacità C. Il rapporto g m /C costituisce dunque una figura di merito assai significativa per le<br />
prestazioni di uno stadio amplificatore (o di un dispositivo).<br />
Idealmente, al fine di massimizzare la velocità di risposta, l'impedenza indiciale del carico<br />
dovrebbe assumere valore infinito ai tempi brevi, in modo che la corrente fornita dal generatore<br />
possa caricare la capacità C più rapidamente possibile, per assumere poi un valore finito costante<br />
allo scopo di definire il guadagno. Questa condizione è ben approssimata usando un'impedenza di<br />
carico costituita da un resistore con un induttore in serie.<br />
Disponendo più elementi amplificatori in parallelo, la situazione non si modifica se il<br />
contributo dominante alla capacità C è costituito dalla capacità d'uscita (incluse le capacità<br />
parassite) di ciascun elemento: la figura di merito g m /C resta infatti invariata dal momento che sia<br />
la transconduttanza che la capacità aumentano dello stesso fattore. La disposizione di più elementi<br />
amplificatori in parallelo risulta invece chiaramente vantaggiosa quando la capacità C è<br />
rappresentata da un carico fisso, dominante rispetto alle capacità d’uscita degli elementi.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
7
Una soluzione assai efficace 4 per migliorare il prodotto banda-guadagno rispetto all’ímpiego di un singolo<br />
amplificatore è costituita dagli amplificatori distribuiti. Questo tipo di circuiti impiega più dispositivi amplificatori che<br />
sono "in parallelo" dal punto di vista del guadagno, ma le cui capacità vengono separate inserendole in linee di<br />
trasmissione a elementi concentrati, secondo lo schema di principio illustrato nella figura qui sotto (le capacità C 1 e C 2<br />
conglobano le capacità, rispettivamente d’ingresso e d’uscita, dei transistori).<br />
Le due linee, quella alimentata dal segnale d'ingresso e quella dove si raccoglie il segnale d'uscita, sono<br />
entrambe adattate, allo scopo di<br />
evitare riflessioni, e sono<br />
realizzate con uguale ritardo per<br />
cella, in modo che su entrambe i<br />
segnali si propaghino in fase. Se<br />
l'ingresso, in particolare, è un<br />
gradino di tensione, il fronte<br />
d'onda del segnale amplificato dal<br />
primo transistore raggiungerà<br />
l'uscita del secondo allo stesso<br />
istante in cui il fronte d'onda<br />
amplificato da quest'ultimo verrà<br />
ad eccitare la linea d'uscita, e così via.<br />
Se il segnale d'ingresso è V 1 , a ciascuna delle basi viene applicato V 1 /2 trattandosi di una linea adattata. Se la<br />
transconduttanza di ciascun transistore è g m , ciascun collettore contribuirà all'uscita con una corrente di intensità<br />
g m V 1 /2, che nella linea d'uscita si suddividerà in parti uguali fra le due onde che viaggiano verso le resistenze di<br />
terminazione. Di conseguenza la corrente totale fornita al carico dagli n transistori sarà ng m V 1 /4. Si conclude che<br />
l'amplificazione statica totale, dalla sorgente al carico, è<br />
(11) A o = -ng m R o2 /4<br />
4. Composizione dei tempi caratteristici<br />
Studiamo ora come si compongono i tempi caratteristici di più stadi amplificatori collegati<br />
in cascata, esaminando il caso di due stadi con funzioni di trasferimento ai tempi brevi B 1 (s) e B 2 (s);<br />
i risultati saranno immediatamente generalizzabili al caso di un numero arbitrario di stadi in cascata.<br />
Scriviamo il prodotto B(s) = B 1 (s)B 2 (s) esprimendo le due funzioni nella forma<br />
approssimata (5):<br />
(12) <br />
2 2 2<br />
2<br />
s 2 <br />
1<br />
s 2 <br />
2<br />
B s 1 s1 1 1 s2 2<br />
<br />
2 2<br />
2 2<br />
<br />
4 T.T.W. Wong, Fundamentals of Distributed Amplification, Artech House, 1993<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
8
Sviluppando il prodotto e trascurando i termini in s di grado superiore al secondo si ottiene<br />
2<br />
s <br />
<br />
1<br />
<br />
2<br />
1<br />
<br />
2<br />
<br />
2 <br />
2<br />
(13) Bs 1 s <br />
2 2<br />
2 1 2<br />
da cui si deduce che = 1 + 2 e 2 = 2 1 + 2 2 . Nel caso di n stadi in cascata si ha pertanto:<br />
(14) = i ; 2 2<br />
= i<br />
<br />
<br />
<br />
Si conclude che i ritardi di più stadi in cascata si compongono linearmente, mentre i tempi<br />
di salita si compongono quadraticamente (sempre per risposte indiciali non oscillanti). Questo<br />
stesso risultato vale anche per i tempi caratteristici definiti empiricamente, cioè per il ritardo t d al<br />
50% e il tempo di salita t r fra il 10% e il 90% del valore finale della risposta indiciale.<br />
Esercizio. Calcolare il tempo di salita di un impulso con tempo di salita di 10 ns, amplificato da un circuito con tempo<br />
di salita di 50 ns, quale viene osservato a un oscilloscopio il cui amplificatore ha, con buona approssimazione, funzione<br />
di trasferimento del primo ordine, con larghezza di banda B = 100 MHz.<br />
5. La larghezza di banda<br />
Consideriamo ora la risposta in regime sinusoidale permanente di un amplificatore per cui la<br />
decomposizione (1) sia significativa. In tal caso la risposta nella regione delle alte frequenze si<br />
ottiene sostituendo s con j nella funzione B(s). La larghezza di banda B, o frequenza di taglio<br />
superiore, come già abbiamo visto nella Parte I, è definita come la frequenza a cui il modulo della<br />
funzione si riduce a 1/2 = 0,707... (-3 dB). Nel caso particolare in cui la B(s) possiede un solo polo<br />
con costante di tempo , sappiamo già che B = 1/2. Nel caso generale la larghezza di banda B,<br />
che qui indicheremo con F per evitare ambiguità di simboli, si ricava risolvendo l'equazione<br />
(15) |B(2jF)| = 1/2<br />
Quando la funzione B(s) risulta dal prodotto di più funzioni, di ciascuna delle quali è nota la<br />
larghezza di banda F i , il calcolo della larghezza di banda F in funzione delle F i non è affatto<br />
immediato. Per questo ci limitiamo a considerare il caso in cui la B(s) abbia soltanto poli reali, cioè<br />
sia costituita dal prodotto di n funzioni, ciascuna con una sola costante di tempo e caratterizzata<br />
dunque dalla banda F i = 1/2 i . In tal caso si ha<br />
B(s) = 1/(1+ i s)<br />
e dalla (15) si ottiene:<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
9
2 2<br />
<br />
i1 i<br />
i1<br />
i<br />
n<br />
n<br />
(16) F<br />
F F <br />
1 2 1 2<br />
<br />
Nel caso particolare in cui tutte le F i sono uguali fra loro, cioè i poli della B(s) sono tutti<br />
coincidenti, si ha<br />
(17) [1 + (F/F i )²] n = 2<br />
e si ricava allora<br />
(18) F = F i (2 1/n - 1) ½<br />
Se le funzioni B i non sono uguali, ma hanno tutte larghezza di banda molto maggiore di F, allora si<br />
può sviluppare la (16) nella forma seguente<br />
<br />
n<br />
2 n<br />
(19) F F F F <br />
1<br />
2 2<br />
1 1 2<br />
1 i<br />
<br />
i<br />
i1<br />
i<br />
<br />
<br />
da cui si ricava infine l'espressione approssimata:<br />
1/<br />
n<br />
F 1 Fi<br />
(20) 2<br />
i1<br />
RISPOSTA AI TEMPI LUNGHI<br />
6. La pendenza iniziale della risposta indiciale<br />
La risposta di un amplificatore ai tempi lunghi (alle basse frequenze) è determinata dai tagli<br />
a bassa frequenza introdotti dalle capacità di disaccoppiamento che separano i vari stadi o dalla<br />
presenza di trasformatori. Se L(s) è la funzione di trasferimento normalizzata che, in base alla<br />
decomposizione (1), caratterizza la risposta ai tempi lunghi, la corrispondente risposta indiciale<br />
l u (t) = L -1 [L(s)/s] presenta valore unitario per t = 0 e si annulla per t che tende all'infinito. L’esempio<br />
più semplice è quello del circuito CR passaalto, per cui si ha L(s) = s/(1+s) con risposta indiciale<br />
l u (t) = exp(-t/) u(t).<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
10
La risposta ai tempi lunghi viene spesso caratterizzata globalmente considerando come<br />
parametro la pendenza iniziale della risposta indiciale normalizzata:<br />
(21)<br />
dlu<br />
<br />
dt<br />
t<br />
<br />
<br />
<br />
t0<br />
Applicando questa definizione al caso del circuito CR considerato prima si ha: = -1/. Si può<br />
interpretare dunque come il negativo del reciproco della costante di tempo equivalente dominante<br />
alle basse frequenze.<br />
Dal valore di<br />
questo parametro dipende<br />
la forma della risposta agli<br />
impulsi, come mostra la<br />
figura a fianco, che<br />
rappresenta la risposta di<br />
un circuito CR a un<br />
gradino unitario e a un<br />
impulso unitario di durata<br />
fissa T per valori<br />
decrescenti di . Si nota in<br />
particolare che alla<br />
risposta a un impulso è sempre associata una "coda", la cui presenza può falsare la misura<br />
dell'ampiezza dell'impulso seguente (ciò che non si<br />
verifica negli amplificatori in continua).<br />
Esercizio. Calcolare l'ampiezza V' che viene misurata<br />
osservando il secondo impulso mostrato nella figura. I valori<br />
dei parametri sono: V = 1 volt, T = 1 µs, T' = 0.7 µs, = 2 s.<br />
Quando, come accade di frequente negli amplificatori, alla funzione L(s) sono associate più<br />
costanti di tempo (per esempio quando essa possiede più zeri all'origine e altrettanti poli reali) può<br />
darsi che la corrispondente risposta indiciale non decada monotonicamente a zero, presentando<br />
dunque delle oscillazioni. Ciò si verifica in particolare quando vi sono più costanti di tempo uguali<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
11
o poco diverse fra loro. Pertanto quando si desidera un decadimento monotono della l u (t) conviene<br />
fare in modo che una delle costanti di tempo sia dominante, cioè assai più breve di tutte le altre.<br />
Esercizio. Calcolare e graficare la risposta indiciale per le funzioni L(s) = (s/(1+s))², L'(s) = (s/(1+s)) 3 .<br />
Tutti questi fenomeni che, come si è detto, conducono a errori anche rilevanti nella misura<br />
dell'ampiezza degli impulsi, possono essere eliminati alla radice ricorrendo ad amplificatori in<br />
continua, oppure ridotti grandemente utilizzando circuiti nonlineari,<br />
generalmente impieganti diodi. Dopo un circuito di accoppiamento CR,<br />
per esempio, si può collegare un diodo verso massa in modo da evitare<br />
che la tensione d’uscita presenti escursioni negative (o positive, a<br />
seconda del verso con cui viene disposto) apprezzabili.<br />
7. Composizione delle pendenze iniziali<br />
Disponendo più stadi in cascata, ciascuno con risposta indiciale con pendenza iniziale i , la<br />
pendenza iniziale della risposta complessiva risulta pari alla somma delle pendenze iniziali dei<br />
singoli stadi:<br />
(22) = i<br />
Questo risultato si dimostra immediatamente nel caso di due blocchi in cascata con<br />
pendenze iniziali 1 = -1/ 1 e 2 = -1/ 2 . Se la funzione complessiva è L(s)= 1 2 s²/(1+ 1 s)(1+ 2 s), la<br />
risposta indiciale è l u (t) = u(t)[ 2 exp(-t/ 1 )- 1 exp(-t/ 2 )]/( 2 - 1 ). Derivando rispetto al tempo e<br />
ponendo t = 0, si ottiene infatti = -(1/ 1 +1/ 2 ) = 1 + 2 .<br />
Il risultato espresso dalla (22) può essere interpretato come segue: un sistema che possiede<br />
una molteplicità di costanti di tempo a bassa frequenza è equivalente, per quanto riguarda la<br />
pendenza iniziale della risposta indiciale, a un sistema con una sola costante di tempo, il cui inverso<br />
è pari alla somma degli inversi di tutte le costanti di tempo del sistema considerato.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
12
CENNI SUGLI <strong>AMPLIFICATORI</strong> PER GRANDI SEGNALI<br />
8. Generalità sugli amplificatori per grandi segnali<br />
Consideriamo ora brevemente gli amplificatori per grandi segnali, dove le ampiezze dei<br />
segnali in gioco - tensioni negli amplificatori di tensione, tensioni e correnti negli amplificatori di<br />
potenza - sono tali che i modelli linearizzati per piccoli segnali non sono più applicabili o comunque<br />
richiedono estrema cautela. In questi circuiti l'attenzione è rivolto sopratutto a ottenere determinate<br />
prestazioni (escursione di tensione sul carico, potenza fornita al carico, efficienza energetica, ecc.),<br />
senza superare i limiti di tensione, corrente, potenza e temperatura oltre i quali i dispositivi si<br />
danneggiano, e assicurando, per quanto possibile, una buona linearità alla relazione ingresso-uscita.<br />
A questo riguardo sottolineiamo subito una importante proprietà dei transistori bipolari,<br />
della quale si deve tener conto: la relazione fra corrente di collettore e corrente di base presenta un<br />
assai maggior grado di linearità (il guadagno h fe dipende relativamente poco dalla corrente al<br />
variare di questa su un intervallo relativamente esteso) della relazione fra corrente di collettore e<br />
tensione base-emettitore (dove entra in gioco la caratteristica esponenziale d'ingresso). Ricordiamo<br />
anche che nei transistori FET di potenza si ha invece buona linearità nella relazione fra la corrente<br />
di drain e la tensione fra porta e source (in questo caso è la transconduttanza che dipende<br />
relativamente poco dalla corrente d'uscita).<br />
Facendo riferimento proprio ai transistori bipolari - per fissare le idee, ma le considerazioni<br />
che seguono sono del tutto generali - a una tensione d'ingresso sinusoidale v b (t) = V b cos(t)<br />
corrisponderà la tensione d'uscita:<br />
(23) v c (t) = V c1 cos(t) + V c2 cos(2t) + V c3 cos(3t) + ...<br />
dove il primo termine rappresenta l'armonica fondamentale e i successivi le armoniche superiori,<br />
generalmente indesiderate. Si definisce distorsione totale (total harmonic distortion, THD) la<br />
grandezza normalizzata, espressa di solito in percentuale<br />
(24)<br />
D <br />
V<br />
V<br />
2 2<br />
c2 c3<br />
V<br />
c1<br />
...<br />
Per un dato circuito, l'entità della distorsione dipende sia dal punto di lavoro prescelto che<br />
dall'ampiezza dei segnali. Essa aumenta, in genere più che proporzionalmente, al crescere<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
13
dell'ampiezza dei segnali, ed assume valori particolarmente elevati quando il dispositivo viene<br />
portato in condizioni di saturazione o d'interdizione (cioè la nonlinearità diventa violenta).<br />
Negli amplificatori di potenza la grandezza essenziale è la potenza P L fornita al carico,<br />
generalmente specificata in regime sinusoidale per un dato valore di distorsione (per esempio, 10 W<br />
con distorsione dell'1%, 20 W con distorsione del 5%). Ma ha grande importanza anche il<br />
rendimento, cioè il rapporto<br />
(25) = P L / P al<br />
fra la potenza P L fornita al carico e quella (P al ) erogata in continua dall'alimentatore. Anche perché<br />
dal rendimento dipende la potenza dissipata nei dispositivi amplificatori, che li riscalda<br />
innalzandone la temperatura. Sono i limiti per quest'ultima grandezza, infatti, che spesso<br />
determinano un limite pratico alla potenza massima che può essere fornita al carico. Poichè d'altra<br />
parte la potenza erogata dall'alimentatore è pari alla somma della potenza fornita al carico e di tutte<br />
le dissipazioni nel circuito (incluse quelle nei dispositivi, che generalmente sono dominanti) si<br />
comprende come il rendimento rappresenti una importante figura di merito di un amplificatore di<br />
potenza. Soprattutto in una sana ottica di sobrietà energetica.<br />
9. Classi di funzionamento<br />
Negli amplificatori di potenza si distinguono varie classi di funzionamento a seconda della<br />
frazione di periodo, con riferimento a segnali sinusoidali, durante la quale i dispositivi si trovano in<br />
conduzione.<br />
Negli amplificatori in classe A i dispositivi si trovano in conduzione, in una regione di<br />
funzionamento almeno approssimativamente lineare, durante tutto il periodo. Di conseguenza la<br />
linearità è relativamente buona (e può venire migliorata ulteriormente utilizzando lo schema a<br />
controfase, di cui ci occuperemo fra breve, che riduce nel carico l'effetto delle distorsioni di ordine<br />
pari).<br />
La figura<br />
mostra che la<br />
potenza massima<br />
(prodotto dei valori<br />
efficaci della<br />
tensione e della<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
14
corrente del segnale) che può essere fornita al carico<br />
(26) P L = (V max - V min )(I max - I min )/8<br />
è determinata dall'estensione della zona approssimativamente lineare delle curve caratteristiche<br />
attorno al punto di lavoro, mentre la potenza media erogata dall'alimentatore è P al = V CC I C , dove I C<br />
è la corrente di polarizzazione nel punto di lavoro prescelto, cioè è costante. Il rendimento dipende<br />
dunque dall'ampiezza del segnale.<br />
In prima approssimazione, cioè supponendo lineare tutta la caratteristica d'uscita del<br />
transistore, si trova che la potenza massima fornita al carico è un quarto di quella assorbita<br />
dall'alimentatore e quindi il rendimento limite è = 25%, come si ottiene ponendo nella (26)<br />
V max = V CC , V min = 0, I max = V CC /R L , I C = I max /2, I min = 0.<br />
In pratica il carico può<br />
venire collegato al dispositivo<br />
amplificatore anche in altri<br />
modi, cioè mediante<br />
accoppiamento induttivo oppure<br />
a trasformatore, come è<br />
mostrato negli schemi a fianco.<br />
In questi circuiti occorre<br />
distinguere fra la retta di carico in continua, la cui pendenza è determinata dalla resistenza (generalmente assai modesta)<br />
dell'induttore o del primario del trasformatore, e la retta di carico in alternata. Quest'ultima passa attraverso il punto di<br />
polarizzazione a riposo del collettore (V C V CC , I C , trascurando la caduta ohmica sull'induttore o sul trasformatore) con<br />
pendenza determinata dalla resistenza del carico (attraverso il rapporto di trasformazione, nel caso di accoppiamento a<br />
trasformatore).<br />
In presenza di segnale la tensione di collettore, in questi circuiti, varia attorno a V C V CC con una escursione<br />
massima totale approssimativamente doppia rispetto al caso del circuito con carico resistivo visto prima. Il rendimento<br />
limite corrispondente al caso di linearizzazione totale è dunque = 50% (ciò si ottiene ponendo nella (26) V max = 2V CC ,<br />
V min = 0, I max = 2I C , I min = 0, e considerando che P al = V CC I C ).<br />
Negli amplificatori in classe B i dispositivi si trovano in conduzione soltanto durante metà<br />
del periodo, e sono dunque polarizzati all'estremo della caratteristica, con corrente di riposo<br />
trascurabile. In questi amplificatori si usa il circuito detto a controfase, che comprende due<br />
dispositivi di polarità opposta (per esempio un transistore NPN e uno PNP), all'ingresso dei quali è<br />
applicato il medesimo segnale, ma disposti in modo che nel carico fluisca la differenza fra le loro<br />
correnti d'uscita. Come è mostrato nella figura a pagina seguente.<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
15
In questi circuiti, a differenza di quelli in classe A,<br />
la potenza erogata dall'alimentatore varia con l'ampiezza<br />
del segnale. In prima approssimazione, la corrente<br />
dell'alimentatore è il valor medio di una sinusoide<br />
rettificata. Pertanto, nell'approssimazione di linearizzazione<br />
totale della caratteristica per un segnale di massima<br />
ampiezza, la potenza erogata dall'alimentatore è<br />
P al = 2V CC ²/R L , mentre la potenza fornita al carico è<br />
P L = V CC ²/2R L ; il rendimento limite è dunque = /4 = 78.5%, assai maggiore che in classe A. E<br />
quindi la potenza dissipata nei dispositivi, a parità di potenza d'uscita, è assai minore che in classe<br />
A.<br />
La distorsione, d'altra parte, può essere rilevante, dal momento che i dispositivi, interdetti a<br />
riposo, vengono portati in conduzione dal segnale e si muovono dunque, sopratutto quando questo<br />
ha piccola ampiezza, in una regione fortemente nonlineare della caratteristica (distorsione di<br />
crossover). Si dimostra poi che se i due dispositivi usati nello schema a controfase hanno<br />
caratteristiche molto simili, le armoniche di ordine pari generate da ciascuno di essi si cancellano<br />
fra loro nel segnale d'uscita.<br />
Negli amplificatori in classe AB i dispositivi si trovano in conduzione durante una frazione<br />
di periodo fra e 2. Questo consente di ridurre la distorsione rispetto alla classe B, ottenendo nel<br />
contempo un rendimento maggiore che in classe A, sebbene inferiore alla classe B. Anche negli<br />
amplificatori in classe AB si adottano schemi a controfase. Lo schema di principio è anzi lo stesso<br />
mostrato a proposito degli amplificatori in classe B. La differenza sta nella diversa polarizzazione<br />
dei transistori in condizioni di riposo, che ora sono accesi mentre in classe B erano al limite<br />
dell'interdizione.<br />
Negli amplificatori in classe C, infine, i dispositivi si<br />
trovano in conduzione solo durante meno della metà del periodo. In<br />
condizioni di riposo essi sono dunque più o meno fortemente<br />
interdetti (la tensione V BB è nulla o negativa per il transistore NPN<br />
in figura) e si accendono solo quando il segnale d’ingresso assume<br />
ampiezza sufficiente. Il comportamento è dunque violentemente<br />
nonlineare, come mostra la forma d'onda della corrente di collettore<br />
nella figura. Ma siccome il carico è costituito da un circuito accordato alla frequenza del segnale, le<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
16
armoniche della corrente danno un contributo trascurabile alla tensione d'uscita (perchè l'impedenza<br />
che il carico presenta per le armoniche è assai minore di quella presentata alla fondamentale, a cui è<br />
accordato). Resta il fatto che l'ampiezza della sinusoide d'uscita non è proporzionale all'ampiezza di<br />
quella d'ingresso. Gli amplificatori in classe C sono dunque utilizzabili per amplificare sinusoidi di<br />
ampiezza costante: per esempio un'onda portante in un sistema a radiofrequenza, ma non un segnale<br />
modulato in ampiezza.<br />
Il vantaggio della classe C riguarda il rendimento, generalmente assai elevato, ancora<br />
maggiore che in classe B. Il motivo può essere compreso in termini qualitativi considerando la<br />
dissipazione nel transistore dello schema in figura: quando la tensione d'uscita è elevata, il<br />
dispositivo è interdetto e dunque non dissipa; quando il dispositivo conduce corrente, invece, la<br />
tensione d'uscita, cioè la tensione di collettore, assume i valori più bassi. Di conseguenza il prodotto<br />
v CE i C , che è quello che conta, è sempre o nullo o relativamente basso.<br />
L'esigenza di migliorare il rendimento degli amplificatori di potenza, che assume particolare<br />
rilievo negli apparati di grande e grandissima potenza, ha condotto a introdurre altre classi di<br />
funzionamento oltre a quelle tradizionali di cui si è fatto cenno finora, rivolgendo l'attenzione<br />
proprio a minimizzare la caduta di tensione sui dispositivi quando questi si trovano in conduzione.<br />
Un esempio interessante sono gli amplificatori in classe D, in cui questo concetto viene spinto<br />
all'estremo facendo lavorare i dispositivi come interruttori. Così si ha dissipazione di potenza solo<br />
quando i dispositivi sono accesi, ma essa è comunque molto bassa, essendo data dal prodotto di una<br />
corrente anche molto elevata per una tensione molto bassa, la tensione di saturazione V CEsat .<br />
In questi amplificatori, che hanno rendimenti assai elevati, prossimi all'unità, occorre però<br />
un apposito circuito (modulatore d'impulsi) che provveda a convertire il segnale analogico<br />
d'ingresso nel segnale impulsivo che comanda gli interruttori che ne costituiscono lo stadio finale di<br />
potenza. E occorre anche un circuito di filtraggio, simbolizzato dall'induttore L nello schema in<br />
figura, che riconverta in forma analogica gli impulsi di corrente generati dagli interruttori.<br />
Notiamo infine che amplificatori in classe D sono oggi disponibili in forma integrata e che questa<br />
tecnologia di recente<br />
si è molto affermata<br />
in campo audio.<br />
Segnale di comando e<br />
schema semplificato di un<br />
amplificatore in classe D<br />
G. V. Pallottino – Maggio 2011 Appunti di Elettronica - parte <strong>VII</strong> pag.<br />
Università di Roma <strong>Sapienza</strong> - Dipartimento di <strong>Fisica</strong><br />
17