Esercizio 4: PRECISIONE A REGIME E ANALISI DELLA STABILITA`
Esercizio 4: PRECISIONE A REGIME E ANALISI DELLA STABILITA`
Esercizio 4: PRECISIONE A REGIME E ANALISI DELLA STABILITA`
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
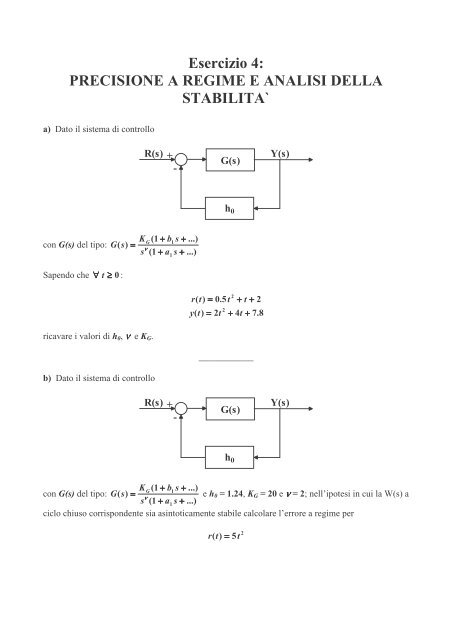
<strong>Esercizio</strong> 4:<strong>PRECISIONE</strong> A <strong>REGIME</strong> E <strong>ANALISI</strong> <strong>DELLA</strong><strong>STABILITA`</strong>a) Dato il sistema di controlloR(s)+-G(s)Y(s)h 0con G(s) del tipo:G(s)=KG(1 + b1s + ...)νs (1 + a s + ...)1Sapendo che ∀ t ≥ 0 :2r ( t)= 0.5t+ t + 22y ( t)= 2t+ 4t+ 7.8ricavare i valori di h 0 , ν e K G .____________b) Dato il sistema di controlloR(s)+-G(s)Y(s)h 0KG(1 + b1s + ...)con G(s) del tipo: G(s)=e hν 0 = 1.24, K G = 20 e ν = 2; nell’ipotesi in cui la W(s) as (1 + a1s + ...)ciclo chiuso corrispondente sia asintoticamente stabile calcolare l’errore a regime perr ( t)= 5t2
c) Dato il sistema di controlloR(s)+-C(s)P(s)Y(s)conP(s)=10(1 + 0.1s)(1+ 0.5s)si determini C(s) tale che il sistema a ciclo chiuso risultante, se stabile, abbia errore a regimecostante rispetto ar( t)= 0. 4te tale errore sia minore o al più uguale a 0.02. Si analizzi la stabilità del sistema complessivo,processo e controllore.