Esercizi di Controlli Automatici: Bode
Esercizi di Controlli Automatici: Bode
Esercizi di Controlli Automatici: Bode

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
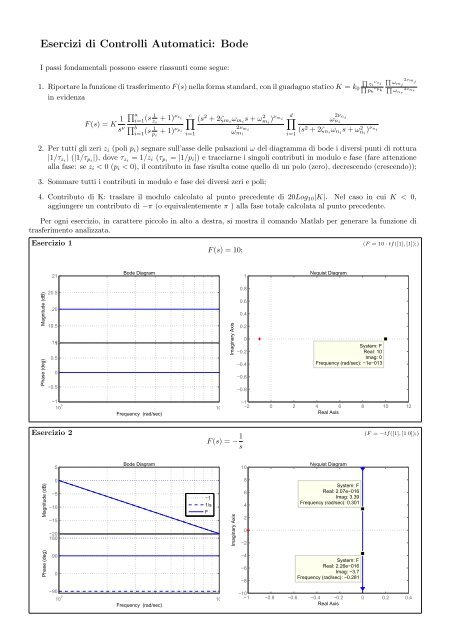
<strong>Esercizi</strong> <strong>di</strong> <strong>Controlli</strong> <strong>Automatici</strong>: <strong>Bode</strong>I passi fondamentali possono essere riassunti come segue:1. Riportare la funzione <strong>di</strong> trasferimento F(s) nella forma standard, con il guadagno statico K = k 0Q ziνz iQ pkνp kQ ωmj2νm jQ ωnr2νnrin evidenzaF(s) = K 1 s ν ∏ ai=1 (s 1 z i+ 1) νz i∏ bi=1 (s 1 p i+ 1) νp ic∏ (s 2 + 2ζ mi ω mi s + ωm 2 i) νm ii=1ω 2νm im id∏i=1ω 2νn in i(s 2 + 2ζ ni ω ni s + ω 2 n i) νn i2. Per tutti gli zeri z i (poli p i ) segnare sull’asse delle pulsazioni ω del <strong>di</strong>agramma <strong>di</strong> bode i <strong>di</strong>versi punti <strong>di</strong> rottura|1/τ zi | (|1/τ pi |), dove τ zi = 1/z i (τ pi = |1/p i |) e tracciarne i singoli contributi in modulo e fase (fare attenzionealla fase: se z i < 0 (p i < 0), il contributo in fase risulta come quello <strong>di</strong> un polo (zero), decrescendo (crescendo));3. Sommare tutti i contributi in modulo e fase dei <strong>di</strong>versi zeri e poli;4. Contributo <strong>di</strong> K: traslare il modulo calcolato al punto precedente <strong>di</strong> 20Log 10 |K|. Nel caso in cui K < 0,aggiungere un contributo <strong>di</strong> −π (o equivalentemente π ) alla fase totale calcolata al punto precedente.Per ogni esercizio, in carattere piccolo in alto a destra, si mostra il comando Matlab per generare la funzione <strong>di</strong>trasferimento analizzata.<strong>Esercizi</strong>o 1 (F = 10 · tf([1], [1]);)F(s) = 10;21<strong>Bode</strong> Diagram1Nyquist DiagramPhase (deg)Magnitude (dB)20.52019.51910.50−0.5Imaginary Axis0.80.60.40.20−0.2−0.4−0.6−0.8System: FReal: 10Imag: 0Frequency (rad/sec): −1e−013−110 0 10 1Frequency (rad/sec)−1−2 0 2 4 6 8 10 12Real Axis<strong>Esercizi</strong>o 2 (F = −tf([1], [1 0]);)F(s) = − 1 s5<strong>Bode</strong> Diagram10Nyquist DiagramMagnitude (dB)0−5−10−15−20180−11/sFImaginary Axis86420−2System: FReal: 2.07e−016Imag: 3.39Frequency (rad/sec): 0.301Phase (deg)900−4−6−8System: FReal: 2.26e−016Imag: −3.7Frequency (rad/sec): −0.281−9010 0 10 1Frequency (rad/sec)−10−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4Real Axis
<strong>Esercizi</strong> <strong>di</strong> <strong>Controlli</strong> <strong>Automatici</strong> 3<strong>Esercizi</strong>o 6 (F = zpk([], [2], 1);)F(s) = 1s − 2 = −1 12 s(−1/2) + 10<strong>Bode</strong> Diagram1Nyquist Diagram−100.8Magnitude (dB)−20−30−40−50 90(s(−1/2)+1) −1FImaginary Axis0.60.40.20−0.2Phase (deg)0−90−0.4−0.6−0.8−18010 −1 10 0 10 1 10 2Frequency (rad/sec)−1−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0Real Axis<strong>Esercizi</strong>o 7 (F = zpk([10], [0], 1);)F(s) = s − 10 = −10 s(−0.1) + 1ss60<strong>Bode</strong> Diagram20Nyquist DiagramMagnitude (dB)40200−20−40−60 360270s(−0.1)+11/sFImaginary Axis151050−5System: FReal: 1Imag: 11.1Frequency (rad/sec): 0.966Phase (deg)180900−10−15System: FReal: 1Imag: −9.75Frequency (rad/sec): −1.1−9010 −1 10 0 10 1 10 2 10 3Frequency (rad/sec)−20−1 −0.5 0 0.5 1 1.5Real Axis<strong>Esercizi</strong>o 8 (F = zpk([−2], [−0.1 − 10 − 10], 1);)s + 2F(s) =(s + 0.1)(s + 10) 2 = 2 s(1/2) + 110 (s10 + 1)(s0.1 + 1) 2100<strong>Bode</strong> Diagram0.1Nyquist DiagramMagnitude (dB)500−500.080.060.04System: FReal: 0.155Imag: 0.0816Frequency (rad/sec): −0.0625Phase (deg)−100−150 900−90s/2+1(10s+1) −1(s/10+1) −2FImaginary Axis0.020−0.02−0.04−0.06−0.08System: FReal: 0.169Imag: −0.0707Frequency (rad/sec): 0.0464−18010 −3 10 −2 10 −1 10 0 10 1 10 2 10 3Frequency (rad/sec)−0.10 0.05 0.1 0.15 0.2Real Axis
<strong>Esercizi</strong> <strong>di</strong> <strong>Controlli</strong> <strong>Automatici</strong> 4<strong>Esercizi</strong>o 9 (F = tf([2 1], [20 1]);)F(s) = 1 + 2s1 + 20s40<strong>Bode</strong> Diagram1Nyquist DiagramPhase (deg)Magnitude (dB)200−20−40−60 90450−452s+1(20s+1) −1FImaginary Axis0.80.60.40.20−0.2−0.4−0.6−0.8System: FReal: 0.335Imag: 0.394Frequency (rad/sec): −0.0931System: FReal: 0.332Imag: −0.393Frequency (rad/sec): 0.0921−9010 −3 10 −2 10 −1 10 0 10 1Frequency (rad/sec)−1−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1Real Axis<strong>Esercizi</strong>o 10 (F = tf([20 1], [2 1]);)F(s) = 1 + 20s1 + 2s60<strong>Bode</strong> Diagram5Nyquist DiagramPhase (deg)Magnitude (dB)40200−20−40 9045020s+1(2s+1) −1FImaginary Axis43210−1−2−3System: FReal: 1.89Imag: 2.69Frequency (rad/sec): 0.185System: FReal: 2.45Imag: −3.3Frequency (rad/sec): −0.223−45−4−9010 −3 10 −2 10 −1 10 0 10 1Frequency (rad/sec)−5−2 0 2 4 6 8 10Real Axis<strong>Esercizi</strong>o 11 (F = tf([−10 1], [10 1]);)F(s) = 1 − 10s1 + 10s40<strong>Bode</strong> Diagram1Nyquist DiagramMagnitude (dB)3020100−10−20−30−40 360270−10s+1(10s+1) −1FImaginary Axis0.80.60.40.20−0.2System: FReal: −0.623Imag: 0.782Frequency (rad/sec): −0.225Phase (deg)180900−0.4−0.6−0.8System: FReal: −0.525Imag: −0.851Frequency (rad/sec): 0.201−9010 −3 10 −2 10 −1 10 0 10 1Frequency (rad/sec)−1−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1Real Axis
<strong>Esercizi</strong> <strong>di</strong> <strong>Controlli</strong> <strong>Automatici</strong> 5<strong>Esercizi</strong>o 12 (F = tf([4], [1 1 4]);)4F(s) =s 2 + 2s + 4 = ωn2 1s 2 + 2ζω n s + ωn2 =s 2ω+ 2ζn2 ω ns + 120<strong>Bode</strong> Diagram1.5Nyquist DiagramMagnitude (dB)0−20−40(s 2 /4+2/4s 2 + 1) −1F10.5System: FReal: −0.32Imag: 0.589Frequency (rad/sec): −2.7−60−800Imaginary Axis0Phase (deg)−45−90−135−0.5−1System: FReal: 0.603Imag: −0.982Frequency (rad/sec): 1.53−18010 −1 10 0 10 1 10 2Frequency (rad/sec)−1.5−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1Real Axis<strong>Esercizi</strong>o 13 (F = tf([1 0.1 4], [1]) ∗ tf([1], [1 0 0]);)F(s) = s2 + 0.1s + 4s 2 = 4 s2 /4 + 0.1/4s + 1s 260<strong>Bode</strong> Diagram1Nyquist DiagramPhase (deg)Magnitude (dB)40200−20−40 180900s 2 /4+0.1/4s + 1s −2FImaginary Axis0.80.60.40.20−0.2−0.4−0.6System: FReal: −13.7Imag: 0.192Frequency (rad/sec): −0.59System: FReal: −12.2Imag: −0.182Frequency (rad/sec): 0.559−90−0.8−18010 −1 10 0 10 1Frequency (rad/sec)−1−25 −20 −15 −10 −5 0 5Real Axis<strong>Esercizi</strong>o 14 (F = −tf([1 1], [1 0 − 1]);)F(s) = − s + 1s 2 − 1 = s + 1(s + 1)(s(−1) + 1)40<strong>Bode</strong> Diagram1Nyquist DiagramMagnitude (dB)3020100−100.80.60.4System: FReal: 0.179Imag: 0.383Frequency (rad/sec): 2.18Phase (deg)−20−30−40 90450−45s+ 1(s+1) −1(s(−1)+1) −1FImaginary Axis0.20−0.2−0.4−0.6−0.8System: FReal: 0.166Imag: −0.372Frequency (rad/sec): −2.36−9010 −2 10 −1 10 0 10 1 10 2Frequency (rad/sec)−1−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1Real Axis