Projekt za statiko
Projekt za statiko
Projekt za statiko

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
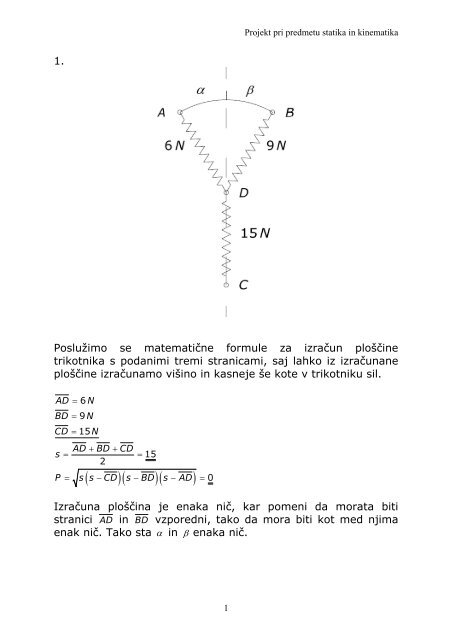
<strong>Projekt</strong> pri predmetu statika in kinematika2.P = 1000Nα = 30 ° , β = 60 ° , γ = 90°P F1 F2= =sinγ sin β sinαFF12= 866,02N= 500NFFF= sinα⋅ F = 433,01N1x1= cosα⋅ F = 750,00N1y1= sin β ⋅ F = 433,01N2x2F = cos β ⋅ F = 250N2y22
<strong>Projekt</strong> pri predmetu statika in kinematika3.Q = 1000Nα = 45°β = 45°γ = 90°Q F1 F2= =sinγ sin β sinαFF12= 707,11N= 707,11NSili v vrveh sta enaki 707,11N.3
<strong>Projekt</strong> pri predmetu statika in kinematika4.Q = 1000Nα = 30°β = 60°γ = 90°Q DF EF= =sin β sinα sinγDFEF= 577,35N= 1154,70NSila v palici DF je 577,35N, v palici EF pa 1154,70N.4
<strong>Projekt</strong> pri predmetu statika in kinematika5.Q = 1000Nα = 60°β = 30°γ = 90°Q BC AC= =sinα sin β sinγACBC= 1154,70N= 577,35NSila v palici AC je 1154,70N, v palici BC pa 577,35N.5
<strong>Projekt</strong> pri predmetu statika in kinematika6.F = 0, 6kNAB = 4mC0 = 2m1D0 = 0,2mN∑iFFF1DM= 10kNi= 0= 1kN⋅ D0DM 1C= =C01CAMN= FA1kN( )A0⋅ F = AB − A0⋅FAA0 ⋅ 1kN = 2, 4kNm − A0 ⋅0, 6kN2, 4kNmA0 = = 1,5m1, 6kN6
<strong>Projekt</strong> pri predmetu statika in kinematika7.7
<strong>Projekt</strong> pri predmetu statika in kinematikaPAB= 1, 8kNABBC =3α = β = 30°Q = 20kN∑iMi= 0 AD ⋅ AB −Q ⋅ AB − P ⋅ BC = 0M M ABM ABsinα ⋅ AD ⋅ AB − sinα ⋅Q ⋅ AB − sinαPAB⋅ = 03 PABAD −Q− = 03 PABAD = Q + = 20,6kN3 ADX= cosα⋅ AD = 17,84kN AD = sinα⋅ AD = 10,30kNY∑iXi= 0B − AD = 0 ⇒ B = AD = 17,84kN∑iFX X X XFYi= 0B − P −Q − AD = 0 ⇒ B = P + Q + AD = 32,10kNY AB Y Y AB YR : A = AD = 10,30 kN, A = AD = 10,30kNA X X Y YR : B = 17,84 kN, B = 32,10kNB X Y8
<strong>Projekt</strong> pri predmetu statika in kinematika8.P1= 200NP = 300NP23∑i= 400NMi= 0P ⋅ 20 + P ⋅ 10 + P ⋅10 − P ⋅ 50 = 0P1 2 3P ⋅ 20 + P ⋅ 10 + P ⋅ 10 4000N + 3000N + 4000N 11000N50 50 501 2 3= = == 220N∑iXi= 0A − P + P = 0X3A = P − P = 400N − 220N = 180NiX∑Yi3= 0A − P − P = 0Y2 1A = P + P = 300N + 200N = 500NYFF2 19
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram10
<strong>Projekt</strong> pri predmetu statika in kinematika9.PoznamoP, α, a, b,mbsin β =AFM = 0∑iiN ⋅ AF + m − P ⋅ a = 0DFYYN ⋅sin β ⋅ AF + m − cosα⋅P ⋅ a = 0DFbNDF⋅ ⋅ AF + m − cosα⋅P ⋅ a = 0AFcosα⋅P ⋅ a − mNDF=b11
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram12
<strong>Projekt</strong> pri predmetu statika in kinematika10.G = 50 N, P = 200NBα = 30 ° , γ = 60°A0 = B0 = 2C0∑ii= 0B = G , CD ⋅ cosα= CD = NY B Y CDP ⋅ A0 = CD⋅ C0 + B⋅B0NCDA0GBP ⋅ A0 = ⋅ + ⋅ A0cosα2 cosαN = P ⋅cos −G ⋅ 2 = 246, 41NCDM( α )BP = sinα⋅ P = 100 N, P = cosα⋅ P = 173,20 N, CD = 142,26 N,X Y XCD = 246, 41 N, B = 28,87 N, B = 50N∑iY X YFXi= 0− P + 0 − CD + B = 0 ⇒ 0 = P + CD − B = 213,39N∑iX X X X X X X XFYi= 0− P + 0 − CD − B = 0 ⇒ 0 = P + CD + B = 469,61NY Y Y Y Y Y Y Y13
<strong>Projekt</strong> pri predmetu statika in kinematika11.QAD= 3kNα = 30°AB = AC = 0, 6AD = 1mN∑iBC= 27,5kNi= 0ADsinα ⋅NBC ⋅ AC − sinα ⋅QAD ⋅ − sinα⋅QM⋅ AD = 02QMMADNBC⋅ AC −QAD⋅= 2 = 15kNAD14
<strong>Projekt</strong> pri predmetu statika in kinematika12.NB= 400N0B= 30cm0A= 50cmα = 120°∑ii= 0( α )N ⋅ 0B = cos − 90° ⋅N ⋅0ANiBA∑NB⋅ 0B= = 277,18Ncos 90° ⋅0AXi= 0( α − )0 − N = 0 ⇒ 0 = N = 138,59NX AX X AX( α )N = sin − 90° ⋅ N = 138,59N∑iAXYi= 0N + 0 + N = 0 ⇒ 0 = −N − N = −640,04NB Y AY Y B AY( α )N = cos − 90° ⋅ N = 240,04NAYMFFAAA15
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram16
<strong>Projekt</strong> pri predmetu statika in kinematika13.P1= 6, 0kNP = 10,0kN2M1= 30,0kNmq = 1,5 kN m∑iXi= 0− P + A − F = 0∑i1x x xYi= 0− P + A + B − Q + E − P + F = 0∑iFF1Y Y Y Y 2 YFMi= 0A ⋅ X + M + B ⋅ X − Q⋅ X + E ⋅ X − P ⋅ X + F ⋅ X = 0Y 1 1 Y 2 3 Y 4 2 5 Y 617
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P11X11Y11= 6, 0kNP = cos 60°⋅ P = 3,0kNP = sin60°⋅ P = 5,20kNM= 30,0kNmq = 1,5 kN m∑iXi= 0− P + A + C = 0 ⇒ A = P − C = 4,64kND1x x X X 1x XXF=−1, 64kN∑iFYi= 0− P + A + B − Q + C = 0 ⇒ A = P − B + Q − C = 13,42kN1Y Y Y Y Y 1Y Y Y∑iMi= 0A ⋅ X + M + B ⋅ X −Q⋅ X + C ⋅ X = 0 ⇒BY 1 1 Y 2 3 Y 4YF−AY=⋅ X − M + Q⋅ X −CY⋅ XX( )( )1 1 3 421Y Y Y 1 1 3 Y 4= =1Y Y 1 1 3 Y 4= =( )22 1− 5,20kN + 1,5 kN m ⋅ 2m + 2,25kN ⋅2m −30,0kNm= +6m− 2m⎛2⎞1, 5 kN m ⋅2m ⋅ ⎜ + 6 m 2, 25kN 8m2⎟ + ⋅⎝ ⎠=−2, 97kN6m− 2mC =−2,25kNY− P − B + Q − C ⋅ X − M + Q⋅ X − C ⋅ X− P + Q − C ⋅ X − M + Q⋅ X −C ⋅ XXX− X=18
<strong>Projekt</strong> pri predmetu statika in kinematika2.q = 1,5 kN m∑iXi= 0− C + D = 0 ⇒ C = D = −1,64kNDiX∑FX X X X=−1, 64kNFYi= 0−C − Q + D = 0 ⇒ C =− Q + D =−1,5 kN m ⋅ 3m + 2,25kN =−2,25kNY Y Y Y∑iFMi= 03Q⋅X1, 5 kN m ⋅3m ⋅ m−Q⋅ X + D ⋅ X = ⇒ D = = 2 = ,25kN1 Y 210Y2X23m19
<strong>Projekt</strong> pri predmetu statika in kinematika3.P2= 10,0kNq = 1,5 kN m∑iXi= 0−D − F = 0 ⇒ D =− F =−1,64kNX x X XF = sin30°⋅ F = 1,64kNXF∑iFYi= 0−D − Q + E − P + F = 0 ⇒ E = D + Q + P − F =Y Y 2 Y Y Y 2 Y= 2,25kN + 1,5 kN m ⋅ 1,5m + 10kN − 2,84kN = 11,66kN∑iFMi= 0−Q⋅ X + E ⋅ X − P ⋅ X + F ⋅ X = 01 Y 2 2 3 Y 4( YY )( )−Q⋅ X + D + Q + P − F ⋅ X − P ⋅ X + FFY1 2 2 2 3Q⋅ X − D + Q + P ⋅ X + P ⋅ X1 Y2 2 2 3= =X− X4 2⋅ X = 01, 51, 5 kN m ⋅1,5m ⋅ m − ( 2, 25kN + 1, 5 kN m ⋅ 1,5m + 10, 0kN)⋅1,5m= 2+5m− 1,5m10,0kN ⋅3m 1,6875kNm − 21,75kNm + 30kNm= = 2, 84kN5m − 1,5m 3,5mY4FFY= = 3, 28kNcos30°20
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram21
<strong>Projekt</strong> pri predmetu statika in kinematika14.P1= 12,0kNP = 20,0kN2MM12= 30,0kNm= 24,0kNmq = 2, 0 kN m∑iAiX∑Xi= 0+ P = 0Yi1X= 0A − P + B − Q + D − P + F = 0Y 1Y Y Y 2 Y∑iFFFMi= 0−P ⋅ X − M + B ⋅ X − Q⋅ X + D ⋅ X + M − P ⋅ X + F ⋅ X = 01Y 1 1 Y 2 3 Y 4 2 2 5 Y 622
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1M1= 12,0kN= 30,0kNmq = 2, 0 kN m∑iXi= 0A + P + C = 0 ⇒ A = −P − C = −8,48kNCX 1X X X 1X XX= 0kNP = cos 45°⋅ P = 8, 48kN1X1∑iFFYi= 0A − P + B − Q + C = 0 ⇒ A = P − B + Q − C = −2,22kNY 1Y Y Y Y 1Y Y Y∑iFMi= 0−P ⋅ X − M + B ⋅ X −Q⋅ X + C ⋅ X = 0 ⇒ B =1Y 1 1 Y 2 3 Y 4YP ⋅ X + M + Q⋅ X − C ⋅ XX1Y1 1 3 Y 4= =1Y12⎛2⎞8, 48kN ⋅ 2m + 30, 0kNm + 2, 0 kN m ⋅2m ⋅ ⎜ + 4,5 m 0,1kN 6,5m2⎟ + ⋅=⎝ ⎠=4,5m= 14,80kNP = sin 45°⋅ P = 8, 48kNCY=−0,1kN23
<strong>Projekt</strong> pri predmetu statika in kinematika2.M2= 24,0kNmq = 2, 0 kN m∑iXi= 0− C + E = 0 ⇒ C = E = 0kNEiX∑X X X X= 0kNYi= 0−C − Q + D + E = 0 ⇒ C = − Q + D + E = −0,1kN∑iY Y Y Y Y YMi= 01 2 Y 3−Q⋅ X1 + DY ⋅ X2 + M2 + EY ⋅ X3= 0 ⇒ DY= =X22,52 kn / m ⋅2,5m ⋅ m − 24kNm + 8,57kN ⋅6m= 2 = 13, 47kN2,5mEYFFF=−8,57kNQ⋅ X − M − E ⋅ X24
<strong>Projekt</strong> pri predmetu statika in kinematika3.P2∑i= 20,0kNXi= 0− E = 0 ⇒ E = 0∑iXYi= 0−E − P + F = 0 ⇒ E = − P + F = − 20,0kN + 11, 43kN = −8,57kN∑iFFY 2 Y Y 2FMi= 0XP ⋅ X 20,0kN ⋅ 2m−P ⋅ X + F ⋅ X = ⇒ F = = = 1,43kN2 1 Y 22 10Y1X23,5m25
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram26
<strong>Projekt</strong> pri predmetu statika in kinematika15.P1= 8, 0kNP = 14,0kN2M1= 25,0kNmq = 1, 0 kN m∑iXi= 0A + B − P = 0∑iX X 2XYi= 0A − P + B − Q + D − P + F = 0Y 1 Y Y 2Y Y∑iFFFMi= 0−P ⋅ X + M + B ⋅ X −Q⋅ X + D ⋅ X − P ⋅ X + F ⋅ X = 01 1 1 Y 2 3 Y 4 2Y 5 Y 627
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1M1= 8, 0kN= 25,0kNmq = 1, 0 kN m∑iXi= 0A + B + C = 0 ⇒ B = −C − A = −0,55kNCX X X X X XX=−7kNAYAX= A⋅ sin30° = ⋅ sin30° = 7,55kNcos30°F = 0∑iYiA − P + B − Q + C = 0 ⇒ A = P − B + Q − C = 13,08kNY 1 Y Y Y 1 Y Y∑iFFMi= 0−P ⋅ X + M + B ⋅ X −Q⋅ X + C ⋅ X = 0 ⇒ B =1 1 1 Y 2 3 Y 4YP1 ⋅ X1 − M1 + Q⋅ X3− C=X24⎛2,5⎞8,0kN ⋅2m − 25,0kNm + 1,0kN m ⋅2,5m ⋅ ⎜ + 5 m 7,82kN 7,5m2⎟ − ⋅=⎝ ⎠=5m=−10, 41kNCY= 7, 82kNY⋅ X=28
<strong>Projekt</strong> pri predmetu statika in kinematika2.q = 1, 0 kN m∑iXi= 0− C + E = 0 ⇒ C = E = −7kNEiX∑X X X X=−7kNYi= 0−C − Q + D + E = 0 ⇒ C = − Q + D + E = 7,82kN∑iY Y Y Y Y YMi= 0Q X D X E X 0 D1 Y 3− ⋅1+Y⋅2+Y⋅3= ⇒Y= =X25,51, 0 kN m ⋅5, 5m ⋅ m + 6, 06kN ⋅5, 5m= 2 = 19,38kN2,5mEYFFF=−6,06kNQ⋅ X − E ⋅ X29
<strong>Projekt</strong> pri predmetu statika in kinematika3.P2∑i= 14,0kNXi= 0−E − P = 0 ⇒ E =− P =−7kNX 2X X 2XP = cos 60°⋅ P = 7kN2X2∑iYi= 0−E − P + F = 0 ⇒ E = − P + F = −6,06kN∑iFFY 2Y Y Y 2Y YFMi= 0P ⋅ X 12,12kN ⋅ 1,5m−P ⋅ X + F ⋅ X = ⇒ F = = ,06kN2Y12Y 1 Y 20Y6X23mP = sin60°⋅ P = 12,12kN2Y230
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram31
<strong>Projekt</strong> pri predmetu statika in kinematika16.P1= 9, 0kNP = 15,0kN2M1= 28,0kNmq = 1, 2 kN / m∑iXi= 0A + P − F = 0∑iX 1X XYi= 0A − Q + C − P + D − P + F = 0Y Y 1Y Y 2 Y∑iFFFMi= 0−Q⋅ X + C ⋅ X − P ⋅ X + D ⋅ X − M − P ⋅ X + F ⋅ X = 01 Y 2 1Y 3 Y 4 1 2 5 Y 632
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.q = 1, 2 kN m∑iXi= 0A + B = 0 ⇒ A = − B = −14,22kN∑iX X X XYi= 0A − Q + B = 0 ⇒ A = Q − B = 2,4kN∑iFFY Y Y YFMi= 04Q ⋅ X1, 2 kN m ⋅4m ⋅ m−Q ⋅ X + B ⋅ X = ⇒ B = = 2 = ,4kN1 Y 210Y2X24m33
<strong>Projekt</strong> pri predmetu statika in kinematika2.P1M1= 9, 0kN= 28,0kNmq = 1, 2 kN m∑iXi= 0− B + P + E = 0 ⇒ B = P + E = 14,22kNEXX 1X X X 1X X= 6, 43kNP = cos30°⋅ P = 7,79kN1X1∑iYi= 0−B − Q + C − P + D + E = 0 ⇒ C = B + Q + P − D − E = 3,25kN∑iY Y 1Y Y Y Y Y 1Y Y YMi= 0−Q⋅ X + C ⋅ X − P ⋅ X + D ⋅ X − M + E ⋅ X = 0 ⇒DYFFF1 Y 2 1Y 3 Y 4 1 Y 6Q⋅ X −C ⋅ X=1 Y 2( )( )+ P ⋅ X + M − E ⋅ XX1Y3 1 Y 64Q⋅ X − B + Q + P − D − E ⋅ X + P ⋅ X + M − E ⋅ X1 Y 1Y Y Y 2 1Y 3 1 Y 6= =Q⋅ X − B + Q + P − E ⋅ X + P ⋅ X + M − E ⋅ X1 Y 1Y Y 2 1Y 3 1 Y 6= =44 221,2 kN m ⋅2m ⋅ m − ( 2, 4kN + 1,2 kN m ⋅ 2m + 4,5kN − 8,57kN)⋅2m= 2+6,5m− 2m4,5kN ⋅ 5m + 28, 0kNm − 8,57kN ⋅8,5m6,5m− 2mBEYY= 2, 4kN= 8,57kNP = sin30°⋅ P = 4,5kN1Y1XX− X==−2,52kN34
<strong>Projekt</strong> pri predmetu statika in kinematika3.P2∑i= 15,0kNXi= 0−E − F = 0 ⇒ E = F = 6,43kNX X X XFYFX= F ⋅ sin 45° = ⋅ sin 45° = 6, 43kNcos 45°F = 0∑iYiE − P + F = 0 ⇒ E = P − F = 8,57kNY 2 Y Y 2 Y∑iFFMi= 0P ⋅ X 15,0kN ⋅ 1,5m−P ⋅ X + F ⋅ X = ⇒ F = = = ,43kN2 1 Y 22 10Y6X23,5m35
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagramć36
<strong>Projekt</strong> pri predmetu statika in kinematika17.P1= 9, 0kNP = 15,0kNP23MMi12∑= 12,0kN= 24,0kNm= 35,0kNmXi= 0− P + P + D = 0∑i1X 2X XYi= 0A − P + C − P + D + F − P = 0Y 1Y Y 2Y Y Y 3∑iFFFMi= 0−P ⋅ X + C ⋅ X − P ⋅ X + D ⋅ X − M + M + F ⋅ X − P ⋅ X = 01Y 1 Y 2 2Y 3 Y 4 1 2 Y 5 3 637
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1∑i= 9, 0kNXi= 0− P + B = 0 ⇒ B = P = 4,5kN1X X X 1XP = cos 60°⋅ P = 4,5kN1X1∑iYi= 0A − P + B = 0 ⇒ A = P − B = 3,9kNY 1Y Y Y 1Y Y∑iFFFMi= 0P ⋅ X 7,79kN ⋅ 1,5 m−P ⋅ X + B ⋅ X = ⇒ B = = = ,89kN1Y11Y 1 Y 20Y3X23mP = sin60°⋅ P = 7,79kN1Y138
<strong>Projekt</strong> pri predmetu statika in kinematika2.P2Mi1∑= 15,0kN= 24,0kNmXi= 0− B + P + D + E = 0 ⇒ D = B − P − E = −6,11kNBEXXX 2X X X X X 2X X= 4,5kN= 0kNP = cos 45°⋅ P = 10,61kN2X2∑iYi= 0− B + C − P + D + E = 0 ⇒ C = B + P − D − E = 1,4kN∑iY Y 2Y Y Y Y Y 2Y Y YMi= 0C ⋅ X − P ⋅ X + D ⋅ X − M + E ⋅ X = 0 ⇒DY 1 2Y 2 Y 3 1 Y 4YFFF−CY⋅ X + P ⋅ X + M=X1 2Y2 1( )( )( )3Y 2Y Y Y 1 2Y 2 1 Y 4= =Y 2Y Y 1 2Y 2 1 Y 4= =2Y33 1− 3,89kN + 10,61kn − 6,8kN ⋅ 2,5m + 10,61kN ⋅4,5m= +6,5m− 2,5m24,0kNm −6,8kN ⋅9m= 19,9kN6,5m− 2,5mBEPYY= 3, 89kN=−6,8kN= 10,61kN− EY⋅ X− B + P − D − E ⋅ X + P ⋅ X + M − E ⋅ X− B + P − E ⋅ X + P ⋅ X + M − E ⋅ XXX− X4=39
<strong>Projekt</strong> pri predmetu statika in kinematika3.P3Mi2∑= 12,0kN= 35,0kNmXi= 0− E = 0kN ⇒ E = 0kN∑iXYi= 0− E + F − P = 0 ⇒ E = F − P = −6,8kN∑iFFY Y 3 Y Y 3FMi= 0M + F ⋅ X − P ⋅ X = 0 ⇒ F =2 Y 1 3 2X− 35,0kNm + 12,0kN ⋅4m= = 5, 2kN2,5mY− M + P ⋅ XX2 3 21=40
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram41
<strong>Projekt</strong> pri predmetu statika in kinematika18.P1= 6, 0kNP = 12,0kNP23M1= 16,0kN= 26,0kNmq = 1, 5 kN m∑iXi= 0A + P + F = 0∑iX 3X XYi= 0A −Q − P + C − P + D − P + F = 0Y 1 Y 2 Y 3Y Y∑iFFFMi= 0−Q⋅ X − P ⋅ X + C ⋅ X − M − P ⋅ X + D ⋅ X − P ⋅ X + F ⋅ X = 01 1 2 Y 3 1 2 4 Y 5 3Y6 Y 742
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1= 6,0kNq = 1, 5 kN m∑iXi= 0A + B = 0 ⇒ B = − A = −6,71kNX X X XAYAX= A⋅ sin 45° = ⋅ sin 45° = 6,71kNcos 45°F = 0∑iYiA −Q − P + B = 0 ⇒ A = Q + P − B = 6,71kNY 1 Y Y 1 Y∑iFFMi= 0Q X P X B X 0 BQ⋅ X + P ⋅ X1 1 2− ⋅1−1⋅2+Y⋅3= ⇒Y= =X34,51,5 kN m ⋅4, 5m ⋅ m + 6, 0kN ⋅2m= 2 = 6, 04kN4,5m43
<strong>Projekt</strong> pri predmetu statika in kinematika2.P2M1= 12,0kN= 26,0kNmq = 1, 5 kN m∑iXi= 0− B + E = 0 ⇒ E = B = −6,71kNBiX∑X X X X=−6,71kNYi= 0−B − Q + C − P + D + E = 0 ⇒ C = B + Q + P − D − E = 10,83kN∑iY Y 2 Y Y Y Y 2 Y YMi= 0−Q⋅ X + C ⋅ X − M − P ⋅ X + D ⋅ X + E ⋅ X = 0 ⇒DYFFF1 Y 2 1 2 3 Y 4 Y 5Q⋅ X −C ⋅ X + M + P ⋅ X − E ⋅ XX1 Y 2 1 2 3 Y 5= =( )4Q⋅ X1− BY+ Q + P − DY − EY ⋅ X + M + P ⋅ X − EY⋅ X=X( )2 2 1 2 3 51 Y 2 Y 2 1 2 3 Y 5= =44 221,5 kN m ⋅2m ⋅ m − ( 6,04kN + 1,5 kN m ⋅ 2m + 12,0kN + 5,96kN)⋅2m= 2+6m− 2m26,0kNm + 12,0kN ⋅ 3,5m + 5,96kN ⋅8m= 16,17kN6m− 2mB = 6,04kNEYYQ⋅ X − B + Q + P − E ⋅ X + M + P ⋅ X − E ⋅ X=−5, 96kNX− X=44
<strong>Projekt</strong> pri predmetu statika in kinematika3.P3∑i= 16,0kNXi= 0− E + P + F = 0 ⇒ F = E − P = −14,71kNEXX 3X X X X 3X=−6,71kNP = cos 60°⋅ P = 8,0kN3X3∑iYi= 0−E − P + F = 0 ⇒ E = − P + F = −5,96kN∑iFFY 3Y Y Y 3Y YFMi= 0P ⋅ X 13,86kN ⋅ 2m−P ⋅ X + F ⋅ X = ⇒ F = = = ,92kN3Y13Y 1 Y 20Y7X23,5mP = sin60°⋅ P = 13,86kN3Y345
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram46
<strong>Projekt</strong> pri predmetu statika in kinematika19.P1= 10,0kNP = 16,0kN2M1= 32,0kNmq = 1, 4 kN m∑iFiX∑Xi= 0+ P = 0Yi2X= 0A + C − Q + E − P + F − P = 0Y Y Y 1 Y 2Y∑iFFFMi= 0− M + C ⋅ X −Q⋅ X + E ⋅ X − P ⋅ X + F ⋅ X − P ⋅ X = 01 Y 1 2 Y 3 1 4 Y 5 2Y647
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.Mii1∑BX∑= 32,0kNmXi= 0Yi= 0= 0A + B = 0 ⇒ A = − B = −8,0kN∑iFFY Y Y YFMi= 0M 32,0kNm− M + B ⋅ X = ⇒ B = = = ,0kN1 Y 110Y8X14m48
<strong>Projekt</strong> pri predmetu statika in kinematika2.q = 1, 4 kN m∑iXi= 0− B + D = 0 ⇒ D = B = 0kNBiX∑X X X X= 0kNYi= 0− B + C − Q + D = 0 ⇒ C = B + Q − D = 16,15kN∑iFFY Y Y Y Y YFMi= 0Y 1 2Y⋅1− ⋅2+Y⋅3= 0 ⇒Y= =X3C X Q X D X D( ) ( )−C ⋅ X + Q⋅X− B + Q − D ⋅ X + Q⋅ X − B + Q ⋅ X + Q⋅XY Y 1 2 Y1 2= = =X X − X3 3 1⎛2,5⎞− ( 8, 0kN + 1, 4 kN m ⋅ 2,5m)2m + 1, 4 kN m ⋅2,5m⋅ ⎜ + 2 m2⎟=⎝ ⎠4,5m− 2mBY= 8, 0kN=−4, 65kN49
<strong>Projekt</strong> pri predmetu statika in kinematika3.P1= 10,0kNP = 16,0kN2q = 1, 4 kN m∑iXi= 0− D + F + P = 0 ⇒ F = D − P = −13,86kNDXX X 2X X X 2X= 0kNP = cos30°⋅ P = 13,86kN2X2∑iYi= 0−D − Q + E − P + F − P = 0 ⇒ E = D + Q + P − F + P = −2,56kN∑iY Y 1 Y 2Y Y Y 1 Y 2YMi= 0−Q⋅ X + E ⋅ X − P ⋅ X + F ⋅ X − P ⋅ X = 0 ⇒FYFFF1 Y 2 1 3 Y 4 2Y5Q⋅ X1 − EY⋅ X2 + P1⋅ X + PY⋅ X=X( )( )43 2 5Q⋅ X − D + Q + P − F + P ⋅ X + P ⋅ X + P ⋅ X1 Y 1 Y 2Y 2 1 3 2Y5= =Q⋅ X − D + Q + P + P ⋅ X + P ⋅ X + P ⋅ X1 Y 1 2Y 2 1 3 2Y5= =2Y44 221, 4 kN m ⋅2m ⋅ m − ( − 4, 65kN + 1, 4 kN m ⋅ 2m + 10, 0kN + 8, 0kN ) ⋅2m= 2+5,5m− 2m10,0kN ⋅ 3,5m + 8,0kN ⋅7,5m= 18,71kN5,5m− 2mDPY=−4, 65kNX= sin30°⋅ P2= 8,0kNX− X=50
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram51
<strong>Projekt</strong> pri predmetu statika in kinematika20.P1= 7, 0kNP = 10,0kNP23M1= 14,0kN= 26,0kNmq = 1, 3 kN m∑iAiX∑Xi= 0+ P = 0Yi2X= 0A − P −Q − P + D + E − P = 0Y 1 2Y Y Y 3∑iFFFMi= 0−P ⋅ X − Q⋅ X − P ⋅ X + D ⋅ X + M + E ⋅ X − P ⋅ X = 01 1 2 2Y 3 Y 4 1 Y 5 3 652
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1∑i= 7, 0kNXi= 0A + B = 0 ⇒ A = − B = −5,0kNBiX X X XX∑= 5, 0kNYi= 0A − P + B = 0 ⇒ A = P − B = 3,0kNY 1 Y Y 1 Y∑iFFFMi= 0P ⋅ X 7, 0kN ⋅ 2m−P ⋅ X + B ⋅ X = ⇒ B = = = ,0kN1 1 Y 21 10Y4X23,5m53
<strong>Projekt</strong> pri predmetu statika in kinematika2.P2= 10,0kNq = 1, 3 kN m∑iXi= 0− B + P + C = 0 ⇒ B = P + C = 5,0kNCXX 2X X X 2X X= 0kNP = cos 60°⋅ P = 5,0kN2X2∑iYi= 0−B −Q − P + C = 0∑iFFY 2Y YFMi= 01 2Y2−Q⋅ X1 − P2 Y⋅ X2 + CY ⋅ X3= 0 ⇒ CY= =X35,51, 3 kN m ⋅5, 5m ⋅ m + 8, 66kN ⋅2m= 2 = 6,72kN5,5mP= sin60°⋅ P = 8,66kN2Y2Q⋅ X + P ⋅ X54
<strong>Projekt</strong> pri predmetu statika in kinematika3.P3M1= 14,0kN= 26,0kNmq = 1, 3 kN m∑iXi= 0− C = 0 ⇒ C = 0kN∑iXYi= 0−C − Q + D + E − P = 0 ⇒ D = C + Q − E + P = 14,0kN∑iY Y Y 3 Y Y Y 3Mi= 0X−Q⋅ X + D ⋅ X + M + E ⋅ X − P ⋅ X = 0 ⇒EYFFF1 Y 2 1 Y 3 3 4Q⋅ X − D ⋅ X − M + P ⋅ XX1 Y 2 1 3 4= =( )3Q⋅ X − C + Q − E + P ⋅ X − M + P ⋅ X1 YY 3 2 1 3 4= =( )Q⋅ X1 − CY+ Q + P3 ⋅ X2− M=X − XX33 21 3 421,3kN m ⋅2m ⋅ m − ( 6,72kN + 1,3kN m ⋅ 2m + 14,0kN ) ⋅2m −26,0kNm= 2+5m− 2m14,0kN⋅ 7m= 9,32kN5m− 2mC = 6,72kNY+ P ⋅ X=55
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram56
<strong>Projekt</strong> pri predmetu statika in kinematika21.P1= 5, 0kNP = 13,0kN2M1= 30,0kNmq = 2, 0 kN m∑iXi= 0A − P − E = 0∑iX 2X XYi= 0A − Q + C − P − P + E = 0Y Y 1 2Y Y∑iFFFMi= 0−Q⋅ X + C ⋅ X + M − P ⋅ X − P ⋅ X + E ⋅ X = 01 Y 2 1 1 3 2Y4 Y 557
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.q = 2, 0 kN m∑iXi= 0A + B = 0 ⇒ A = − B = 15,67kNBiX X X XX∑=−15,67kNYi= 0A − Q + B = 0 ⇒ A = Q − B = 5,0kN∑iFFY Y Y YFMi= 05Q⋅X2, 0 kN m ⋅5m ⋅ m−Q⋅ X + B ⋅ X = ⇒ B = = 2 = ,0kN1 Y 210Y5X25m58
<strong>Projekt</strong> pri predmetu statika in kinematika2.M1= 30,0kNmq = 2, 0 kN m∑iXi= 0− B + D = 0 ⇒ B = D = −15,67kNDiX∑X X X X=−15,67kNYi= 0−B − Q + C + D = 0 ⇒ C = B + Q − D = 29,5kN∑iFFY Y Y Y Y YFMi= 0Q⋅ X −C ⋅ X1 Y 2−Q⋅ X1 + CY ⋅ X2 + M1 + DY ⋅ X3= 0 ⇒ DY= =X3( ) ( )Q⋅ X − B + Q − D ⋅ X − M Q⋅ X − B + Q ⋅ X − M1 Y Y 2 1 1 Y2 1= = =X X − X3 3 22,52, 0 kN m ⋅2,5m⋅ m − ( 5, 0kN + 2, 0 kN m⋅2,5m)⋅2,5m −30, 0kNm=2 =−19,5kN5m− 2,5mBY= 5, 0kN59
<strong>Projekt</strong> pri predmetu statika in kinematika3.P1= 5, 0kNP = 13,0kN2∑iXi= 0−D − P − E = 0 ⇒ D = −P − E = −15,67kNX 2X X X 2X XEYEX= E ⋅ sin 45° = ⋅ sin 45° = 9,17kNcos 45°P = cos 60°⋅ P = 6,5kN2X2∑iYi= 0−D − P − P + E = 0∑iFFY 1 2Y YFMi= 01 1 2Y2−P1 ⋅ X1 − P2 Y⋅ X2 + EY ⋅ X3= 0 ⇒ EY= =X35, 0kN ⋅ 2m + 11,26 kN ⋅4m=6mP = sin60°⋅ P = 11,26kN2Y2= 9,17kNP ⋅ X + P ⋅ X60
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagram61
<strong>Projekt</strong> pri predmetu statika in kinematika22.P1= 18,0kNP = 7, 0kNP23Mi1∑= 12,0kN= 16,0kNmXi= 0A + P − P + E = 0∑iX 1X 2X XYi= 0A − P + B − P − P + E = 0Y 1Y Y 2Y 3 Y∑iFFFMi= 0−P ⋅ X + B ⋅ X − M − P ⋅ X − P ⋅ X + E ⋅ X = 01Y 1 Y 2 1 2Y 3 3 4 Y 562
<strong>Projekt</strong> pri predmetu statika in kinematikaReakcije1.P1Mi1∑= 18,0kN= 16,0kNmXi= 0A + P + C = 0 ⇒ C = −A − P = −17,13kNX 1X X X X 1XAYAX= sin30°⋅ A = sin30°⋅ = 4, 4kNcos30°P = cos 45°⋅ P = 12,73kN1X1∑iYi= 0A − P + B + C = 0 ⇒ A = P − B − C = −7,63kNY 1Y Y Y Y 1Y Y Y∑iFFFMi= 0P1 Y⋅ X1 + M1−C−P1 Y⋅ X1 + BY ⋅ X2 − M1 + CY ⋅ X3= 0 ⇒ BY=X12,73kN ⋅ 2,5m + 16,0kNm + 11,2kN ⋅7m= = 31,56kN4mC =−11,2kNYP = sin 45°⋅ P = 12,73kN1Y12Y⋅ X3=63
<strong>Projekt</strong> pri predmetu statika in kinematika2.P2∑i= 7, 0kNXi= 0−C − P + D = 0 ⇒ D = C + P = −13,63kNCXX 2X X X X 2X=−17,13kNP = cos 60°⋅ P = 3,5kN2X2∑iYi= 0−C − P + D = 0 ⇒ C = − P + D = −11,2kNDYY 2Y Y Y 2Y Y=−5,14kNP = sin60°⋅ P = 6,06kN2Y2∑iFFFMi= 0−P ⋅ X + D ⋅ X = 02Y1 Y 264
<strong>Projekt</strong> pri predmetu statika in kinematika3.P3∑i= 12,0kNXi= 0− D + E = 0 ⇒ E = D = −13,63kNDiX∑X X X X=−13,63kNYi= 0−D − P + E = 0 ⇒ D = − P + E = −5,14kN∑iFFY 3 Y Y 3 YFMi= 0P ⋅ X 12,0kN ⋅ 2m−P ⋅ X + E ⋅ X = ⇒ E = = = ,86kN3 1 Y 23 10Y6X23,5m65
<strong>Projekt</strong> pri predmetu statika in kinematikaNTM diagrami66