MMT klausimai
MMT klausimai
MMT klausimai

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
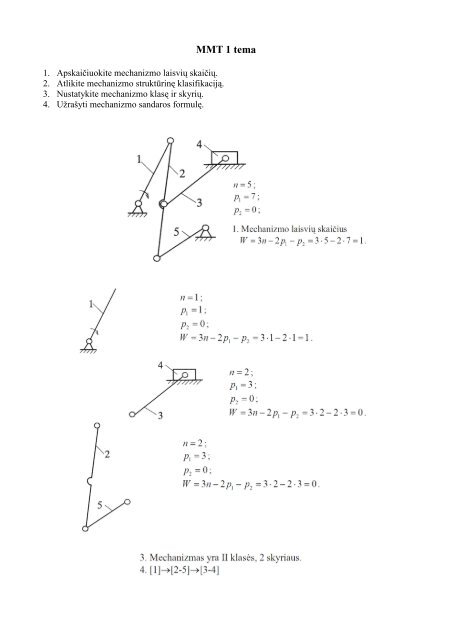
1. Apskaičiuokite mechanizmo laisvių skaičių.<br />
2. Atlikite mechanizmo struktūrinę klasifikaciją.<br />
3. Nustatykite mechanizmo klasę ir skyrių.<br />
4. Užrašyti mechanizmo sandaros formulę.<br />
<strong>MMT</strong> 1 tema
<strong>MMT</strong> 2 tema
<strong>MMT</strong> 3 tema<br />
SVIRTINIAI MECHANIZMAI (15-18 p.)<br />
1. Svirtinių mechanizmų skirstymas pagal kinematinių porų tipą ir pad÷tį. Trumpai apibūdinkite (15 p.).<br />
2. Keturgrandžių šarnyrinių mechanizmų skirstymas pagal grandžių ilgių santykį (3.1 pav., 15-16 p.).<br />
3. Skriejimo buvimo sąlyga skriejiko svirties mechanizmuose (3.1 pav., a, 15 p.).<br />
4. Skriejiko svirties mechanizmo kraštinių pad÷čių O 3 B′<br />
ir O 3 B ′′ nustatymas (3.2 pav., 16 p.).<br />
5. Skriejiko svirties mechanizmo svirties kampinio greičio kaitos koeficientas ir jo apskaičiavimas (16 p.).<br />
6. Skriejiko svirties mechanizmo neapibr÷žtos pad÷tys, kai varančioji grandis yra svirtis (3.2 pav., 16 p.).<br />
7. Apibūdinkite skriejiko svirties mechanizmo sl÷gio (ϑ )ir judesio perdavimo (γ) kampus (3.3 pav., 16-17 p.).<br />
8. Pad÷tys, kuriose gaunamos skriejiko svirties mechanizmo sl÷gio ϑ ir judesio perdavimo γ kampų:<br />
1) ekstremalios reikšm÷s; 2) geriausios darbo sąlygos (3.3 pav., 16-17 p.).<br />
9. Keturgrandžių skriejiko slankiklio mechanizmų: 1) tipai; 2) mechanizmų panaudojimas (3.4 pav. 17 p.).<br />
10. Skriejiko slankiklio mechanizmo slankiklio eigos h nustatymas (3.4 ir 3.5 pav., 17 p.; taip pat 29-31 p.).<br />
11. Neašinio ir ašinio skriejiko slankiklio mechanizmo slankiklio greičio kaitos koeficientų nustatymas (3.5 pav., 17 p.).<br />
12. Apibūdinkite skriejiko slankiklio mechanizmo (3.5 pav., 17 p.):<br />
1) sl÷gio (ϑ ) ir judesio perdavimo (γ) kampus; 2) pad÷tį, kurioje gaunama didžiausia sl÷gio kampo reikšm÷.<br />
13. Apibūdinkite keturgrandį kulisinį mechanizmą (3.6 pav., 18 p.).<br />
14. Kulisinių mechanizmų tipai ir panaudojimas (3.6 pav., 18 p.).<br />
15. Kulisinio mechanizmo kulis÷s kampinio greičio kaitos koeficientas ir jo galimos reikšm÷s (3.6 pav., 18 p.).<br />
KUMŠTELINIAI MECHANIZMAI (32-42 p.)<br />
16. Svarbiausi kumštelinio mechanizmo sintez÷s etapai (32 p.).<br />
17. Apibūdinkite kumštelinį mechanizmą sudarančias grandis (5.1 pav., 32 p.).<br />
18. Kumštelinių mechanizmų tipai (5.1 pav., a, b, c, ... i, 32-33 p.).<br />
19. Kumštelinių mechanizmų privalumai ir trūkumai (33 p.).<br />
20. Kumštelinių mechanizmų kinematin÷s analiz÷s uždaviniai (33 p.).<br />
21. Galimos sekiklio jud÷jimo faz÷s kumšteliniame mechanizme (5.2 pav., 33 p.).<br />
22. Fazinių kumštelio pasisukimo kampų nustatymas, kai e≠0, o sekiklis tolsta, art÷ja ir nejuda (34 p.).<br />
23. Fazinių kumštelio pasisukimo kampų nustatymas, kai e=0, o sekiklis tolsta, art÷ja ir nejuda (34 p.).<br />
24. Apibūdinkite stovo inversijos metodą sekiklio pad÷čiai nustatyti (5.2 pav., 34 p.).<br />
25. Sekiklio greičių ir pagreičių nustatymo būdai (34 p.; 42 p.; taip pat 30-31 p.).<br />
26. Apibūdinkite kumštelinio mechanizmo sl÷gio ϑ ir judesio perdavimo γ kampus (5.3 pav., 34 p.).<br />
27. Kumštelinio mechanizmo sl÷gio ϑ ir judesio perdavimo γ kampų pad÷tis ir kitimas (5.3 pav., a, b, ... e, 34 p.), kai:<br />
1) sekiklis smailus; 2) sekiklis plokščias.<br />
28. Sl÷gio kampo įtaka mechanizmo darbui (5.4 pav., 34-35 p.).<br />
29. Sekiklio greičio analogo s′ ir sl÷gio kampo ϑ nustatymas grafin÷s analiz÷s būdu (5.5 pav., 35-36 p.).<br />
30. Apibūdinkite sekiklio jud÷jimo d÷snį: 1) kietais smūgiais; 2) minkštais smūgiais; 3) be smūgių (5.6 ir 5.7 pav.).<br />
31. Nurodykite kumštelinių mechanizmų svarbiausius matmenis norimam sekiklio jud÷jimo d÷sniui gauti (37 p.).<br />
32. Kumštelio spindulio R 0 ir e nustatymas grafiškai (sąlygai ϑ
<strong>MMT</strong> 4 tema<br />
CILINDRINöS KRUMPLINöS PAVAROS (43-57 p.)<br />
1. Jungtiniai paviršiai ir jungtiniai profiliai (43 p.).<br />
2. Plokščiasis kabinimasis (6.1 pav., 43 p.):<br />
1) poliaus P pad÷tys ašių O 1 O 2 atžvilgiu; 2) perdavimo santykio u ženklo nustatymas.<br />
3. Krumplinių pavarų skirstymas pagal ašių pad÷tį (6.2 pav., 44 p.).<br />
4. Krumplinių pavarų skirstymas pagal krumplių išsid÷stymą (6.2 pav., 44 p.).<br />
5. Krumplinių pavarų skirstymas pagal kabinimosi pobūdį (6.2 pav., 44 p.).<br />
6. Evolvent÷s profilis: 1) evolventinio profilio sudarymas; 2) evolventinių krumpliaračių privalumai (45 p.).<br />
7. Evolvent÷s savyb÷s (45 p.).<br />
8. Evolvent÷s taško K y nustatymas polin÷je koordinačių sistemoje (6.4 pav., 45 p.).<br />
9. Krumplin÷s pavaros evolventinio kabinimosi savyb÷s (6.5 pav., a, b, c, 46 p.).<br />
10. Krumpliaračių gamyba: 1) krumpliaračių gamybos būdai; 2) krumpliaračių gamybai naudojami įrankiai (47 p.).<br />
*<br />
11. Apibūdinkite svarbiausius pradinio gamybinio kontūro parametrus: r-r; d-d; t-t; p; α; ha<br />
⋅m (6.6 pav., 47 p.).<br />
12. Apibūdinkite: 1) įrankio perstūmą x⋅m; 2) tris įrankio pad÷tis gaminamojo krumpliaračio atžvilgiu (6.7 pav., 48 p.).<br />
13. Krumplinių pavarų skirstymas pagal krumpliaračių perstūmos koeficientų x 1 ir x 2 sumą (49 p.).<br />
14. Paaiškinkite, kod÷l nesutampa koreguotų krumpliaračių parametrai d ir d w bei staklinio kabinimosi α ir pavaros<br />
kabinimosi α w kampai (49 p.).<br />
15. Cilindrinio evolventinio krumpliaračio parametrai: h, h a , h f , p, s, e, d, d b , d a , d f , α (6.9 pav., 51 p.).<br />
16. Krumplių interferencija ir jos įtaka krumplin÷s pavaros darbui (6.10 pav., 52 p.).<br />
17. Krumpliaračio pašaknio išpjovos įtaka pavaros darbui (6.10 pav., 52 p.).<br />
18. Krumpliaračio pašaknio išpjova: 1) mažiausias krumplių skaičius z min , kai norima pagaminti krumpliaratį be<br />
pašaknio išpjovos; 2) krumpliaračio gamyba be pašaknio išpjovos, kai krumplių skaičius z
<strong>MMT</strong> 5 tema<br />
SUDöTINGI KRUMPLINIAI MECHANIZMAI (66-74 p.)<br />
1. Krumpliniai mechanizmai su nejudamomis ašimis (8.1 pav., 66 p.):<br />
1) apibūdinkite laipsninio jungimo mechanizmą;<br />
2) apskaičiuokite laipsninio jungimo mechanizmo perdavimo santykį u 14 .<br />
2. Krumpliniai mechanizmai su nejudamomis ašimis (8.2 pav., 66-67 p.):<br />
1) apibūdinkite nuoseklaus jungimo mechanizmą;<br />
2) apskaičiuokite nuoseklaus jungimo mechanizmo perdavimo santykį u 14 .<br />
3. Velenų sukimosi krypties nustatymas rodyklių metodu (66 p.).<br />
4. Sud÷tingų krumplinių mechanizmų paskirtis:<br />
1) reduktoriaus; 2) pavarų d÷ž÷s; 3) reversavimo mechanizmo (67 p.).<br />
5. Mechanizmų su nejudamomis ašimis projektavimo etapai (68 p.).<br />
6. Krumpliniai mechanizmai su judamomis ašimis (satelitiniai mechanizmai) (8.6 pav., 68 p.):<br />
1) Apibūdinkite: centrinius krumpliaračius; satelitą; vediklį;<br />
2) satelitinių mechanizmų skirstymas.<br />
7. Diferencialinis mechanizmas (8.6 pav., 68-69 p.):<br />
1) nustatykite diferencialo laisvių skaičių W;<br />
2) diferencialo panaudojimas;<br />
3) diferencialo darbo sąlygų gerinimas.<br />
8. Diferencialinis mechanizmas (8.6 pav., 68 p.):<br />
( H )<br />
( H ) ω1<br />
ω1<br />
− ωH<br />
1) paaiškinkite Viliso formulę u14 = = diferencialui;<br />
( H )<br />
ω ω − ω<br />
2) nustatykite perdavimo santykio u<br />
4<br />
( H )<br />
14<br />
ženklą.<br />
9. Planetinis mechanizmas (8.8-8.10 pav., 70-73 p.):<br />
1) nustatykite mechanizmo laisvių skaičių W;<br />
2) planetinius mechanizmų skirstymas pagal sujungimo tipą.<br />
( H )<br />
4<br />
H<br />
10. Užrašykite ir paaiškinkite Viliso formulę u<br />
14<br />
= (arba u 1 H ) paprastam planetiniam mechanizmui: (8.8 pav., 71 p.).<br />
11. Planetiniai mechanizmai (8.8 pav., a, b, 71 p.):<br />
(H )<br />
1) apibūdinkite planetinį mechanizmą su neigiamu perdavimo santykio ženklu − u CN<br />
;<br />
2) nustatykite šio mechanizmo perdavimo santykio u 1 H nuo centrinio krumpliaračio vedikliui ženklą.<br />
12. Planetiniai mechanizmai (8.8 pav., c, d, 71 p.):<br />
(H )<br />
1) apibūdinkite planetinį mechanizmą su teigiamu perdavimo santykio ženklu u<br />
CN<br />
;<br />
2) nustatykite šio mechanizmo perdavimo santykio u 1 H nuo centrinio krumpliaračio vedikliui ženklą.<br />
13. Perdavimo santykio u H1<br />
nustatymas, kai į÷jimo grandis yra vediklis ir u 14 ≈ 1 (71 p.).<br />
14. Paprastų planetinių mechanizmų sintez÷: trys papildomos sąlygos planetiniam reduktoriui surinkti (74 p.).<br />
MECHANIZMŲ KINETOSTATINö ANALIZö (75-79 p.)<br />
15. Išvardinkite ir apibūdinkite pagrindinius j÷gų analiz÷s uždavinius (75 p.).<br />
16. d‘Alambero principas reakcijos j÷goms ir atsveriamajam momentui nustatyti (75 p.).<br />
17. Mechanizmo grandis veikiančios išorin÷s j÷gos ir jų atliekamas darbas (teigiamas, neigiamas, neatliekamas) (75 p.).<br />
18. Mechanizmo grandis veikiančios vidin÷s j÷gos ir jų atliekamas darbas (teigiamas, neigiamas, neatliekamas) (75 p.).<br />
19. Atsveriamosios inercijos j÷gos ir momento nustatymas, kai grandis slenka (9.1 pav., 76 p.).<br />
20. Atsveriamosios inercijos j÷gos ir momento nustatymas, kai grandis juda sud÷tingu judesiu (9.2 pav., 76 p.).<br />
21. Atsveriamosios inercijos j÷gos ir momento nustatymas, kai grandies sukimosi ašis sutampa su svorio centru (76 p.).<br />
22. Kiek ir kokie parametrai nežinomi j÷gų veikiamoje sukamojoje kinematin÷je poroje (9.4 pav., a, 77 p.).<br />
23. Kiek ir kokie parametrai nežinomi j÷gų veikiamoje slenkamojoje kinematin÷je poroje (9.4 pav., b, c, 77 p.).<br />
24. Kiek ir kokie parametrai nežinomi j÷gų veikiamoje aukštesniojoje kinematin÷je poroje (9.5 pav., 77 p.).<br />
25. Kinematin÷s grandin÷s: 1) statinio apibr÷žtumo sąvoka; 2) išsprendžiamumo sąlyga (77 p.).<br />
26. Kinematin÷s grandin÷s: 1) statinio apibr÷žtumo sąlyga; 2) mechanizmų neapibr÷žtumo sąvoka (77 p.).<br />
27. Mechanizmų kinetostatin÷s analiz÷s tvarka (78 p.).<br />
28. Atsveriamosios j÷gos (momento) nustatymas grafiniu Žukovskio metodu (78-79 p.).<br />
( H )