
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
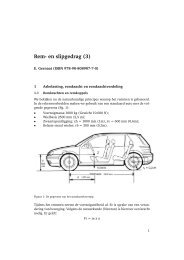
Rem- en slipgedrag (7)<br />
E. Gernaat (ISBN 978-90-808907-7-0)<br />
1 Elektronisch Stabiliteits Programma (ESP of VSC)<br />
1.1 Inleiding<br />
Als aanvulling op het ABS- en ASR-systeem worden meer en meer voertuigen<br />
uitgerust met ESP, ook wel Vehicle Stability Control (VSC) genoemd. De<br />
systemen hebben gemeenschappelijk dat ze er voor moeten zorgen dat de<br />
rem- (ABS), stuw- (ASR) en spoorkrachten (ESP) nooit de fysieke limieten van<br />
de beschikbare wrijvingscoëfficiënt zullen overstijgen. Bovendien zien we dat<br />
alle genoemde systemen gebruik maken van het remsysteem. Hoofddoel van<br />
het ESP-systeem is om het bochtgedrag te verbeteren door extreem over- en<br />
onderstuur te voorkomen. Dit geldt in hoofdzaak voor situaties waarin tijdens<br />
het nemen van een bocht geremd wordt of uitwijkmaneuvres plaatsvinden.<br />
Wanneer een auto in de bocht zodanig afgeremd wordt dat de wrijvingslimiet<br />
wordt overschreden ontstaat er een sterke vorm van over- of onderstuur.<br />
Extreem onderstuur ontstaat wanneer er met te hoge snelheid een bocht wordt<br />
genomen, in de bocht te sterk geremd wordt of wanneer de wielen onverwachts<br />
met ijs of grind worden geconfronteerd. De auto maakt dan een minder scherpe<br />
bocht dan met het stuurwiel wordt aangegeven of anders gezegd de auto heeft<br />
de neiging om rechtuit te blijven rijden. Een auto is overstuurd wanneer de<br />
werkelijke bocht scherper is dan met het stuurwiel wordt aangegeven. Extreem<br />
overstuur kan bijv. ontstaan wanneer de achterwielen geblokkeerd raken of<br />
de bestuurder te sterk naar binnen stuurt. De achterkant slipt dan weg naar<br />
de buitenbocht. De kracht waarmee de auto om zijn verticale as gaat draaien<br />
veroorzaakt een giermoment.<br />
Wanneer we nu het giermoment kunnen opheffen door een tegengesteld<br />
giermoment aan te brengen dan kunnen we de auto weer in het juiste spoor<br />
krijgen. Het aanbrengen van een tegengesteld giermoment gebeurt door<br />
het afremmen van één soms twee wielen. Fig. 7.1 a en b geven de eerder<br />
genoemde situaties weer. In fig. 7.1a is een onderstuursituatie getekend. Door<br />
nu in eerste instantie het linker achterwiel te gaan afremmen ontstaat een<br />
corrigerend giermoment waardoor het stuurkarakter weer neutraal wordt. In<br />
1
fig. 7.1b wordt ter compensatie van het overstuurkarakter in eerste instantie<br />
het rechtervoorwiel afgeremd. Het daardoor ontstane rechtsomdraaiende<br />
koppel corrigeerd het stuureffect weer naar neutraal. Zie ook fig. 7.12.<br />
Figuur 1: Door één wiel af te remmen wordt een corrigerend stuurmoment opgewekt en wordt<br />
weer een neutraal stuurkarakter verkregen. Het linkerachterwiel wordt afgeremd in geval van<br />
onderstuur (a) en het rechtervoorwiel in geval van overstuur (b).<br />
2 Uitvoering<br />
Wanneer het voertuig al is uitgevoerd met een ABS, ASR-systeem dan betreft<br />
het in hoofdzaak een uitbreiding van het aantal sensoren en actuatoren en een<br />
aanpassing van de software. De sensoren moeten informatie doorgeven waaruit<br />
de computer kan bepalen of het afremmen van een wiel in de bocht noodzakelijk<br />
is. De belangrijkste extra sensoren van een ESP-systeem zijn:<br />
• een stuur(wiel)hoeksensor;<br />
• dwarsversnellingssensor (g-sensor);<br />
• giermomentsensor (yawsensor).<br />
2.1 De stuurhoeksensor<br />
Het signaal wordt gebruikt om het door de bestuurder gewenste stuurgedrag in<br />
kaart te brengen. Meestal maakt de ’airbag-contactveer’ deel uit van de stuurhoekunit<br />
(fig.7.2). De stuurhoeksensor maakt hier gebruik van een tweetal<br />
opto-couplers waartussen schijven met uitsparingen draaien. De ene schijf is<br />
2
Figuur 2: De stuurhoeksensor. Ook de airbag wordt via deze sensor aangesloten (tek. Seat).<br />
volledig symmetrisch waardoor de bijbehorende opto-coupler een blokspanning<br />
produceert met een duty-cycle van 50%. De tweede schijf is niet symmetrisch.<br />
Door de verschillen in grootte van de uitsparingen ontstaat een a-symmetrisch<br />
bloksignaal. Fig. 7.3 geeft het principe weer. Door de twee signalen met elkaar<br />
te vergelijken kan zowel de draairichting, het aantal afgelegde omwentelingen,<br />
de snelheid van verdraaien en de stand van het stuurwiel worden bepaald. Er<br />
zijn ook uitvoeringen van stuurhoeksensoren die berusten op de werking van<br />
magneto-resistieve sensoren. De verkregen informatie wordt (meestal) via de<br />
CAN-bus naar de ESP-computer gestuurd. Het is bij een dergelijke uitvoering<br />
niet mogelijk om het signaal van de stuurhoeksensor zelf te meten. De interne<br />
CAN-controller zet de informatie direct om in een CAN-boodschap. Alleen de<br />
CAN-bus aansluiting komt naar buiten.<br />
2.2 De dwarsversnellingssensor (g-sensor)<br />
Deze sensor registreert de centrifugaalkracht of centripetale kracht van het<br />
voertuig in een bocht. De spoorkracht kan zo worden vastgesteld. De sensor kan<br />
bestaan uit twee condensatoren en de benodigde stuurelektronica (fig. 7.4).<br />
Een verplaatsbare plaat die de twee condensatoren van elkaar scheidt staat onder<br />
invloed van de centrifugaalkracht. Verschuiving van de plaat ten gevolge<br />
van het nemen van een bocht verandert de capaciteit van de condensatoren.<br />
De stuurelektronica zorgt ervoor dat, afhankelijk van de bochtversnelling, er<br />
een spanning tussen de 0 en 5 V naar de ESP-computer wordt gestuurd. Een<br />
spanning van 2,5 V geeft aan dat er geen dwarsversnelling aanwezig is.<br />
3
Figuur 3: Principe van een stuurhoeksensor, opgebouwd uit 2 opto-couplers (tek. Seat)<br />
Figuur 4: Het principe van een g-sensor bestaande uit twee condensatoren (tek. Seat).<br />
4
2.2.1 Achtergrond van de g-sensor<br />
De mechanica leert ons dat voor een verandering van een beweging een kracht<br />
nodig is. Versnellen en vertragen, zo hebben we gezien, gaat niet zo maar. Remkrachten<br />
zijn nodig om het voertuig te vertragen en acceleratiekrachten zijn<br />
nodig om het voertuig te versnellen. Ze voldoen aan de formule F = m x a. In<br />
een bocht kunnen we stellen dat de snelheid in lengterichting vermindert en<br />
de snelheid in dwarsrichting toeneemt. Er is dan sprake van een voortdurende<br />
snelheidsverandering hoewel de snelheid van het voertuig zelf niet verandert.<br />
De centriputale kracht (Fc) of spoorkracht is nodig om deze richtingsverandering<br />
te verkrijgen. De formule hiervoor luidt:<br />
die ook te schrijven is als:<br />
Fc = (m x v 2 ) / rc<br />
Fc = m x (v 2 /rc)<br />
Nu wordt v 2 /rc wel de hoekversnelling genoemd zodat de formule weer overgaat<br />
in:<br />
2.2.2 Voorbeeld vraagstuk<br />
F(c) = m x a<br />
Gegeven: Een auto maakt een bocht met een straal van 100 m en heeft een<br />
massa van 1000 kg. De snelheid bedraagt 120 km/h. Gevraagd:<br />
1. Bereken de hoekversnelling van het voertuig<br />
2. Bereken de spoorkracht die de banden op (zouden) moeten brengen om<br />
het voertuig de bocht te doen beschrijven.<br />
Oplossing:<br />
• De hoekversnelling bedraagt v 2 / rc = 33,32 / 100 = 11,1 m/s 2<br />
• Fc = m x a ingevuld: 1000 kg x 11,1 m/s 2 = 11100 N<br />
2.3 De giermomentsensor (yaw-sensor)<br />
De giermomentsensor registreert de verdraaiing van het voertuig om de verticale<br />
as en zet die om in een waarde die wel de draaisnelheid wordt genoemd.<br />
De draaisnelheid wordt in de diagnose-apparatuur weergegeven in graden per<br />
seconde. Het principe berust op de gyroscopische krachten (Corioliskracht).<br />
Wanneer een roterend lichaam uit zijn draaivlak wordt gebracht dan ontstaan<br />
gyroscopische krachten. Door deze krachten te meten kunnen we de grootte van<br />
verandering van het draaivlak te weten komen. De sensor bestaat uit een soort<br />
dubbele stemvork. De bovenste stemvork wordt door een wisselspanning van<br />
11 kHz vanuit de stuurelektronica in resonantie gebracht. De onderste stemvork<br />
heet de meetstemvork en heeft een eigen resonantiefrequentie van 11,33<br />
kHz. Bij het draaien van het voertuig om zijn verticale as zorgt de Corioliskracht<br />
voor een tordering van de stemvork. De torsie genereert met behulp van<br />
5
piëzo-elementen een spanningsverschil, dat door de computer wordt gemeten.<br />
De computer bepaalt op deze wijze het door de remkracht opgewekte giermoment.<br />
De spanning variëert weer tussen de 0 en 5 V. De sensor geeft 2,5 V af<br />
indien er geen verdraaiing geregistreerd wordt. Fig. 7.5 geeft het werkingsprincipe<br />
weer. De opstelling van de diverse ESP-componenten in het voertuig laat<br />
Figuur 5: Werkingsprincipe van de giermomentsensor(tek. Seat)<br />
fig. 7.6 zien. De giermomentsensor en de dwarsversnellingssensor vormen één<br />
geheel en worden in het midden van het voertuig gemonteerd. Communicatie<br />
tussen motormanagement-computer en de ABS/ASR/ESP-computer alsmede de<br />
sensoren geschiedt via de CAN-bus.<br />
2.4 Remdruksensoren<br />
Hoewel niet in fig. 7.6 afgebeeld zijn de meeste ESP-systemen uitgevoerd met<br />
twee remdruksensoren. Voor elk circuit één (fig. 7.7). De sensoren leveren vaak<br />
een analoge spanning die afhankelijk van de druk tussen de 0 en 5 V variëert.<br />
Ook een PWM-regeling is natuurlijk mogelijk. Bij het ITT-systeem berust de<br />
remdruksensor op de werking van een condensator. Wanneer door de remdruk<br />
de platen dichter na elkaar toe worden geschoven dan verandert de capaciteit.<br />
Deze capaciteitsverandering wordt geregisteerd.<br />
2.5 Rem-assistentie<br />
In de rembekrachtiger bevindt zich een magneetklep die bij bekrachtiging door<br />
de ESP-computer buitenlucht achter het membraan toelaat waardoor de hoofd-<br />
6
Figuur 6: Componentenopstelling van een ESP-systeem (tek. Bosch)<br />
Figuur 7: Remdruksensoren zoals op een ESP-systeem kunnen worden aangetroffen (tek. Seat).<br />
7
emcilinder druk kan opbouwen. Dit veroorzaakt een voordruk van ongeveer 10<br />
bar aan de toevoerkant van de ABS/ASR/ESP-pomp. Uiteraard wordt de computer<br />
hierover geïnformeerd met behulp van een remdetectieschakelaar. Fig.<br />
7.8 geeft de opbouw weer. In onbekrachtigde toestand heerst aan beide kanten<br />
van het membraan vacuum (links). Bij het bekrachtigen van de spoel wordt<br />
de zuigerklep naar rechts bewogen en wordt de schotelklep geopend (rechts).<br />
Buitenlucht kan dan aan de rechterzijde van het membraan komen waardoor<br />
de bekrachtiging in werking wordt gezet.<br />
Figuur 8: Remassistentie met behulp van een magneetklep die buitenlucht achter het membraan<br />
toelaat (tek. Seat).<br />
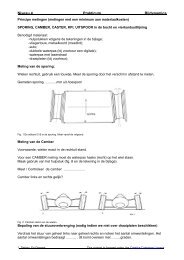
2.6 Het kleppenblok van het ABS/ASR/ESP-systeem<br />
Fig. 7.9 geeft het kleppenblok en fig. 7.10 de computer weer. Deze vormen één<br />
geheel.<br />
8
Figuur 9: Het kleppenblok met pomp van de ABS/ASR/ESP-computer (tek. Seat).<br />
Figuur 10: De ABS/ASR/ESP-computer met de klepspoelen als actuatoren. Totaal 12 kleppen.<br />
4 x 2 ABS kleppen, 2 x 2 kleppen voor het opbouwen van remdruk voor en achter zonder<br />
bekrachtiging van het rempedaal (tek. Seat).<br />
9
3 ESP-remdrukregeling<br />
Zie fig. 7.11. Opbouw van de remdruk geschiedt in eerste instantie door remassistentie<br />
met een voordruk van 10 bar. In de getekende stand staat de 2-3 klep<br />
zo getekend dat onderdruk aan beide zijden van het bekrachtigingsmembraan<br />
staat. Wanneer de klep wordt bekrachtigd wordt de verbinding met de buitenlucht<br />
achter het membraan tot stand gebracht. De bekrachtiging is dan een feit.<br />
Als voorbeeld van een ESP-activiteit nemen we aan dat het (binnenste) linkerachterwiel<br />
moet worden afgeremd. Het gaat dan om een onderstuur-situatie.<br />
Het kleppenstelsel moet voorkomen dat deze druk ook naar de andere wielen<br />
gaat. Hiervoor sluit de computer de toevoerkleppen (4) naar de overige wielen<br />
(RA, LV en RV). Ook de omschakelklep (2) van het circuit achter sluit om te<br />
voorkomen dat de druk zich verplaatst naar de hoofdremcilinder. De toevoerklep<br />
(3) opent zodat de hoofdpomp (7) de vloeistof (onder voordruk) doorpompt<br />
naar het linkerachterwiel. De druk kan (door druk vasthouden, druk<br />
verminderen en druk opbouwen) voldoende nauwkeurig worden afgeregeld<br />
zodat het vereiste tegenkoppel wordt bereikt. De actuele remdruk wordt teruggekoppeld<br />
door de remdruksensor. Mocht deze ingreep ontoereikend zijn dan<br />
wordt bij sommige systemen het remsysteem van het linker voorwiel geactiveerd.<br />
Hiervoor wordt omschakelklep (2) (circuit voor) gesloten en de toevoerklep<br />
(3) geopend evenals de klep (4) (LV). Nu kan de pomp (7) de remdruk<br />
aldaar opbouwen. De verdere regeling geschiedt door de drie bekende fasen<br />
van druk opbouwen, vast houden en verlagen. Dit wordt gerealiseerd door de<br />
kleppen (4) en (5) afwisselend te bedienen. Terugkoppeling van de druk gebeurt<br />
weer door de druksensor.<br />
4 Regelstrategie<br />
Het functioneringsprincipe bestaat uit het vergelijken van de door de bestuurder<br />
bepaalde theoretische baan met de werkelijke baan. Het resultaat van de<br />
vergelijking is al dan niet een correctie op het stuurgedrag van het voertuig. De<br />
stuureenheid berekent de theoretische baan door middel van de stuurhoek en<br />
het toerental van de wielen.<br />
Om het werkelijke stuureffect te berekenen moeten de draaisnelheid, het toerental<br />
van de wielen en de dwarsversnelling bekend zijn. De ESP-remdruk<br />
wordt ingesteld en teruggekoppeld door de remdruksensoren.<br />
Door de werking van het ESP-systeem wordt een corrigerend giermoment om<br />
de verticale as door middel van het afremmen van één van de wielen opgewekt.<br />
De theoretische baan of anders gezegd de door de bestuurder gewenste<br />
bocht kan zo worden gevolgd. Activering van het ESP gebeurt alleen bij het<br />
vooruit rijden en wanneer er een overmaat aan onderstuur of overstuur wordt<br />
vastgesteld. In geval van onderstuur, remt het ESP op het binnenste achterwiel<br />
in de bocht. Het opgewekte corrigerende draaimoment ondersteunt het<br />
10
Figuur 11: Schematische opbouw van het kleppenblok van een ABS/ASR/ESP-systeem<br />
11
spoorkrachtmoment van het buitenste voorwiel van het voertuig. In geval van<br />
overstuur remt ter ondersteuning van het spoorkrachtmoment van het buitenste<br />
achterwiel het ESP op het buitenste voorwiel. De voortgebrachte koppels<br />
wijzigen tevens in geringe mate het draaicentrum (fig. 7.12). Het kan voor-<br />
Figuur 12: Figuur links: Ingeval van onderstuur wordt het linkerachterwiel afgeremd. Figuur<br />
rechts: Ingeval van overstuur wordt het rechtervoorwiel afgeremd.<br />
komen dat er voortdurend onder- en overstuurreacties achter elkaar worden<br />
geproduceerd zoals bijv. bij het ontwijken van een hindernis op de rijweg. In<br />
deze omstandigheden corrigeert de ESP-functie de baan continu. Ook tijdens<br />
het µ-split remmen wordt het ESP-systeem actief.<br />
4.1 Regeling in combinatie met het motormanagement<br />
Wanneer we aannemen dat een voertuig op een gegeven moment overstuurd<br />
is dan zal de achterzijde van het het voertuig naar de buitenzijde van de bocht<br />
bewegen. Het motormanagement zal in eerste instantie het aandrijfmoment<br />
verminderen. De dwarswrijvingscoëfficiënt kan hierdoor weer toenemen. Vermindering<br />
van het aandrijfmoment geschiedt door de gasklepopening te verkleinen,<br />
de ontsteking te verlaten of door het uitschakelen van cilinders (één en<br />
ander afhankelijk van de uitvoering). Blijft het giermoment alsnog te groot dan<br />
zal een tegen-giermoment door het ESP-systeem moeten worden opgebouwd.<br />
12
5 ESP-II<br />
Bij de ESP-II systemen gaat het om de combinatie van het rem- en het besturingssysteem,<br />
de zgn. actieve stuurregelfunctie (ALR). Fig. 7.13 laat een dergelijke<br />
actieve stuurregelunit zien. Het remmen gedurende een µ-split situatie<br />
Figuur 13: Actieve stuurinrichting voor het ESP II systeem.<br />
stelt -zoals we reeds eerder hebben opgemerkt- het ABS-systeem voor een probleem.<br />
Een maximale remkracht toelaten op elk individueel wiel kan ontoelaatbare<br />
stuurkrachten opleveren. Er wordt dus gekozen voor een bepaalde remfilosofie<br />
(bijv. select-low) wat een compromis is tussen stuurkracht en remkracht.<br />
Bij het ESP-II systeem wordt ingegrepen op de stuurbekrachtiging. De stuurbekrachtiging<br />
bestaat uit een elektro-motor die bijv. via een planetair tandwielstelsel<br />
een extra kracht op de stuuras levert (fig. 7.14). Het ESP-systeem kan<br />
zodoende de besturing beïnvloeden door zelf tegenstuur te gaan geven (fig.<br />
7.15). In de genoemde µ-split situatie kan de fabrikant dan meer remkracht<br />
toelaten terwijl de stuurreactie door de stuurbekrachtiging wordt opgevangen.<br />
Het eerste ESP-II systeem is op een BMW-limousine in 2005 geleverd. Een soortgelijk<br />
systeem komt uit op de VAG-modellen en heet dan ESP+.<br />
13
Figuur 14: Stuurinrichting ESP-II systeem. 1) stuurinrichting met planeetstelsel, 2) elektromotor.<br />
Tek. MOT<br />
Figuur 15: Noodzakelijke stuurreactie van de bestuurder bij het conventionele ESP-systeem tijdens<br />
het remmen (boven) en het ESP II-systeem (onder). Tek. MOT.<br />
14
6 Het elektrische schema<br />
Het elektrische schema van fig. 7.16 betreft het schema van het Mark 20<br />
ABS/ASR/ESP-systeem zoals o.a. bij Volkswagen en Seat wordt toegepast.<br />
Verklaring<br />
D Ontstekings- en startschakelaar<br />
E256 Drukknop voor ASR/ESP<br />
F Remlichtschakelaar<br />
Fg Handremschakelaar<br />
F34 Remvloeistofpeilschakelaar<br />
F83 ESP-remdetectieschakelaar<br />
G44 Rechter achter toerentalsensor<br />
G45 Rechter voor toerentalsensor<br />
G46 Linker achtertoerentalsensor<br />
G47 Rechter achtertoerentalsensor<br />
G85 Stuurhoekzender<br />
G200 Dwarsversnellingssensor<br />
G201-214 Remdrukzender<br />
G202 Giersensor<br />
G249 Lengteversnellingszender (Alleen vierwielaandrijving)<br />
Jxxx Stuureenheden, besturing van de motor<br />
J104 Stuureenheid voor ABS met ESP<br />
J217 Stuureenheid voor automatische versnellingsbak<br />
J285 Instrumentenpaneel<br />
J508 Relais voor opheffing van het remlicht<br />
K14 Handremverklikkerlicht<br />
K47 ABS- of ABS/EDS-verklikkerlicht<br />
Kl 18 Remsysteemverklikkerlicht<br />
Kl 55 ASR/ESP-verklikkerlicht<br />
L71 Verlichting voor ASR/ESP-schakelaar<br />
M20-21 Lamp voor remlichten.<br />
N99-101-133-134 ABS-inlaatkleppen<br />
N100-102-135-136 ABS-uitlaalkieppen.<br />
N225-226 Omschakelkleppen (terugslagkleppen)<br />
N227-228 Zuigkleppen<br />
N247 Elektromagnetische remassistentie<br />
T16 Diagnosestekker<br />
V64 Hydraulische elektropomp<br />
J401 Stuureenheid van het navigatie- en radiosysteem<br />
7 Diagnose en afstellingen<br />
We lezen de systeemgegevens van de ABS/ASR/ESP-computer met behulp<br />
van de tester via de diagnose-connector uit. Uiteraard kan de hulp van een<br />
multimeter of oscilloscoop worden ingeroepen. Wanneer een component van<br />
het ESP-systeem wordt vervangen zal de ESP-computer het nieuwe onderdeel<br />
15
Figuur 16: Het elektrische schema van het Mark 20 ABS/ASR/ESP-systeem (Tek. Seat)<br />
16
moeten kalibreren. Dit geschiedt bij de Volkswagen modellen met de VAGsysteemtester.<br />
Hiervoor is een functie 04 ’Basisafstelling’ beschikbaar. Deze basisafstelling<br />
kent de volgende groepsnummers:<br />
• 001 Ontluchting van de hydraulische eenheid;<br />
• 002 Controle van de remvoordruk;<br />
• 060 Kalibrering van de stuurhoeksensor;<br />
• 063 Kalibrering van de dwarsversnellingssensor;<br />
• 066 Nulkalibrering van de remdruksensoren.<br />
Behalve het uitlezen van de foutcodes (en uiteraard het wissen hiervan) kunnen<br />
we met de moderne seriële apparatuur de waarden van de diverse sensoren,<br />
zoals de computer deze verwerkt heeft, uitlezen. De tabel van fig. 7.17 geeft<br />
een voorbeeld. Interpretatie van de gegevens die worden verkregen door het<br />
uitlezen van deze meetblokken moeten door de technicus zelf gebeuren.<br />
Groep<br />
nummer<br />
001<br />
002<br />
003<br />
004<br />
005<br />
125<br />
Figuur 17<br />
Momentele<br />
Veld 1 Veld 2 Veld 3 Veld 4<br />
snelheid wiel L.V.<br />
tijdens rijden<br />
Momentele<br />
snelheid wiel L.A.<br />
Snelh. wiel L.V. Snelh. wiel R.V. Snelh. wiel L.A.<br />
Status remlicht−<br />
schakelaar<br />
Draaihoek stuur−<br />
wiel in graden<br />
Druk hydr. circuit<br />
sensor 1 in bar<br />
Status CAN−bus<br />
motor<br />
Momentele<br />
snelheid wiel R.V.<br />
tijdens rijden<br />
Status remlicht−<br />
schakelaar<br />
Dwarsversnelling<br />
in m/s2<br />
Druk hydr. circuit<br />
sensor 2 in bar<br />
Status CAN−bus<br />
stuurhoeksensor<br />
8 De uitwijktest of elandtest<br />
tijdens rijden<br />
Vrij<br />
Draaisnelheid in<br />
graden/s<br />
Vrij<br />
Status CAN−bus<br />
automaat<br />
Momentele<br />
snelheid wiel R.A<br />
Snelh. wiel R.A.<br />
tijdens rijden<br />
Deze test maakt deel uit van een aantal genormaliseerde testen die tot doel hebben<br />
om de veiligheidsaspecten van het voertuig te beoordelen. Met name gaat<br />
het dan over de zgn. roll-over omstandigheden. Ongeveer 50% van de roll-overs<br />
gebeurt ten gevolge van het te hard rijden in een bocht en 25% wordt veroorzaakt<br />
door een ontwijkmaneuvre (de eland). In Amerika staat deze test bekend<br />
onder de ’double lane change’. De ’double lane change’ werd al 30 jaar geleden<br />
door GM ingevoerd en heeft model gestaan voor de nu genormaliseerde<br />
(IS03888) elandtest. De test wordt uitgevoerd op een droog wegdek en simuleert<br />
het ontwijken van een obstakel. De functionaliteit van het ESP-systeem<br />
wordt vaak met behulp van deze test beoordeeld. Fig. 7.18 laat de genormaliseerde<br />
test zien. Testaanvang:<br />
Vrij<br />
Vrij<br />
Vrij<br />
17
Figuur 18: De elandtest (tek. MOT)<br />
18
Fase 1 = Hoogste versnelling (handbak). In D (automaat) bij 2000 t/min.<br />
Fase 2 = Gas loslaten<br />
Fase 3 = Snelheidsmeting met lichtkast, stuuruitslag naar links.<br />
Fase 4 = Stuuruitslag naar rechts.<br />
Fase 5 = Einde test.<br />
9 Vragen en opgaven<br />
1. Omschrijf het begrip ’onderstuur’ en ’overstuur’.<br />
2. Op grond waarvan zal een voertuig met motor achterin veelal een neiging<br />
tot overstuur vertonen?<br />
3. Onder welke extreme omstandigheden kan overstuur ontstaan?<br />
4. Wat is de algemene taak van een ESP-systeem?<br />
5. Wat verstaat men onder het giermoment van een auto?<br />
6. Op welke wijze kan het ESP-systeem een giermoment compenseren?<br />
7. Welk wiel wordt in geval van onderstuur afgeremd?<br />
8. Welk wiel wordt in geval van overstuur afgeremd?<br />
9. Welke (extra) sensoren heeft een voertuig dat met ABS/ASR is uitgerust<br />
nodig voor een aanvullend ESP-systeem?<br />
10. Wat registreert een yaw-sensor?<br />
11. Wat registeert de stuurhoeksensor?<br />
12. Hoeveel g bedraagt de hoekversnelling van een auto die een bocht maakt<br />
met een straal van 80 meter en een snelheid bezit van 100 km/h?<br />
13. Hoe werkt een g-sensor?<br />
14. Op welke wijze wordt de remvoordruk verkregen bij het beschreven ESPsysteem?<br />
15. Wat is de taak van de remdruksensoren in het ESP-proces?<br />
16. Beschrijf in stappen wat er gebeurt wanneer een te grote onderstuursituatie<br />
dreigt op een voertuig uitgerust men een volledig ESP-systeem.<br />
17. Geef de stand van alle kleppen weer wanneer remcorrectie op één wiel<br />
plaatsvindt tijdens een onderstuursituatie (fig. 7.11).<br />
18. Waarin verschilt de 2e generatie ESP van de 1e generatie?<br />
19. Hoe kan het dat in het schema van fig. 7.16 maar 6 kleppen zijn getekend?<br />
20. Met welk onderdeelnummer worden in het schema van fig. 7.16 de gierhoeksensor,<br />
de stuurhoeksensor en de g-sensor weergegeven?<br />
21. De stuurhoeksensor is via de CAN-bus aangesloten op de ESP-computer.<br />
Valt dat ook uit de tekening op te maken?<br />
22. Op welke wijze zou u de diagnosetester gebruiken om de werking van<br />
het ESP-systeem te controleren?<br />
23. In welk groepsnummer kunt u zien of het ESP-systeem ook daadwerkelijk<br />
in actie komt?<br />
19