r - Wisnet
r - Wisnet
r - Wisnet

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
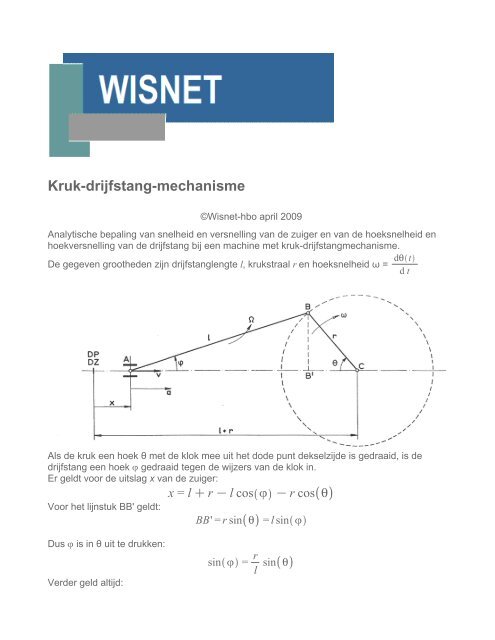
Kruk-drijfstang-mechanisme<br />
©<strong>Wisnet</strong>-hbo april 2009<br />
Analytische bepaling van snelheid en versnelling van de zuiger en van de hoeksnelheid en<br />
hoekversnelling van de drijfstang bij een machine met kruk-drijfstangmechanisme.<br />
dθ t<br />
De gegeven grootheden zijn drijfstanglengte l, krukstraal r en hoeksnelheid ω =<br />
d t<br />
Als de kruk een hoek θ met de klok mee uit het dode punt dekselzijde is gedraaid, is de<br />
drijfstang een hoek 4 gedraaid tegen de wijzers van de klok in.<br />
Er geldt voor de uitslag x van de zuiger:<br />
x = l Cr Kl cos 4 Kr cos θ<br />
Voor het lijnstuk BB' geldt:<br />
BB' = r sin θ = l sin 4<br />
Dus 4 is in θ uit te drukken:<br />
Verder geld altijd:<br />
sin 4 = r<br />
l<br />
sin θ
sin 4 2 Ccos 4 2 =1<br />
Dus cos(4) kan uitgedrukt worden in θ:<br />
cos 4 = 1 Ksin 4 2 = 1 K r2 2<br />
2 sin θ<br />
l<br />
Met behulp van machtreeksbenadering kan deze wortelvorm benaderd worden door<br />
cos 4 = 1 K r2<br />
l 2 sin θ 2 z 1 K r2 2<br />
2 sin θ<br />
2 l<br />
omdat de verhouding r<br />
in de praktijk altijd kleiner dan 1 is en in het kwadraat dus nog kleiner<br />
l<br />
is en omdat de sinus maximaal gelijk aan 1 is, kan de benadering toegepast worden die<br />
afkomstig is van de reeksontwikkeling. Het rekenwerk wordt dan een stuk eenvoudiger:<br />
1 Kx z 1K x<br />
2<br />
De benaderingsformule voor de uitwijking van de zuiger wordt dus nu:<br />
Herleiden geeft:<br />
Animatie<br />
Script van de animatie<br />
Snelheid en versnelling<br />
x z l CrKl 1K r2<br />
2 l 2 sin θ 2 Kr cos θ<br />
x z r 1Kcos θ C r2 2<br />
sin θ<br />
2 l<br />
x z r 1Kcos θ t C r2<br />
sin θ t<br />
2 l<br />
Stel de veranderlijke krukhoek θ als functie van t.<br />
Veronderstel de krukhoek verloopt lineair met ω als hoeksnelheid (in radialen per seconde).<br />
Dan is de verplaatsing x van de zuiger:<br />
De snelheid van de zuiger v = dx<br />
d t<br />
x z r 1Kcos ω t C r2 2<br />
sin ω t<br />
2 l<br />
v z ω r sin ω t C<br />
ω r2<br />
l<br />
sin ω t cos ω t<br />
2
Nog verder herleiden door ω en r buiten haken te halen en met behulp van de formule<br />
De versnelling van de zuiger a = d2x dv<br />
=<br />
2<br />
d t d t<br />
Grafieken<br />
O<br />
O<br />
O<br />
O<br />
O<br />
sin 2 x =2 sin x cos x<br />
v z ω r sin ω t C r<br />
sin 2 ω t<br />
2 l<br />
a z ω 2 r cos ω t C r<br />
l<br />
cos 2 ω t<br />
Begin eerst de toekenningen te doen van de systeemconstanten van drijfstanglengte l en<br />
krukstraal r en hoeksnelheid ω in radialen per seconde.<br />
Daarna kunnen de grafieken van de verplaatsing x en de snelheid v en de versnelling a van<br />
de zuiger getekend worden.<br />
interface displayprecision =5 : l d 0.8; r d 0.1; ω d 2;<br />
l := 0.80000<br />
r := 0.10000<br />
ω := 2<br />
x d r 1Kcos ω t C r2<br />
2$l sin ω t 2 ;<br />
x := 0.10000 K0.10000 cos 2 t C0.00625 sin 2 t 2<br />
v d ω r sin ω t C r<br />
sin 2 ω t ;<br />
2 l<br />
v := 0.20000 sin 2 t C0.01250 sin 4 t<br />
a d ω 2 r cos ω t C r<br />
l<br />
cos 2 ω t ;<br />
a := 0.40000 cos 2 t C0.05000 cos 4 t<br />
plot x, v, a , t = 0 ..20, color = red, blue, green , legend = uitwijking, snelheid,<br />
versnelling ;
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0<br />
K0.1<br />
K0.2<br />
K0.3<br />
5 10<br />
t<br />
15 20<br />
uitwijking snelheid versnelling