6. Transformasjoner. - Universitetet i Tromsø
6. Transformasjoner. - Universitetet i Tromsø
6. Transformasjoner. - Universitetet i Tromsø

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
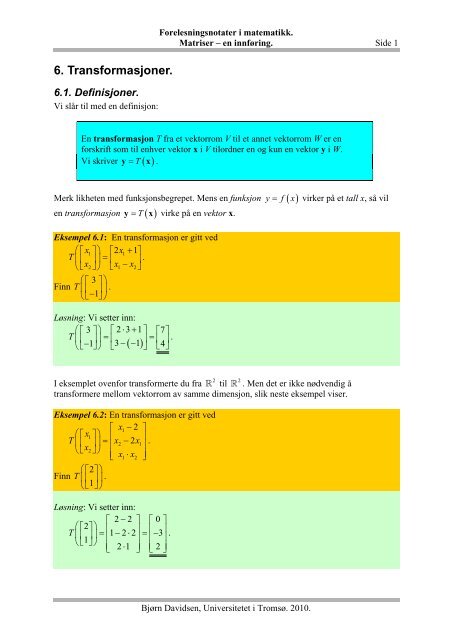
<strong>6.</strong> <strong>Transformasjoner</strong>.<strong>6.</strong>1. Definisjoner.Vi slår til med en definisjon:Forelesningsnotater i matematikk.Matriser – en innføring. Side 1En transformasjon T fra et vektorrom V til et annet vektorrom W er enforskrift som til enhver vektor x i V tilordner en og kun en vektor y i W.Vi skriver y x .= T ( )Merk likheten med funksjonsbegrepet. Mens en funksjon y = f ( x)virker på et tall x, så vilen transformasjon y = T ( x)virke på en vektor x.Eksempel <strong>6.</strong>1: En transformasjon er gitt ved⎛⎡x1⎤⎞ ⎡2x1+1⎤T ⎜⎢ x⎥⎟=⎢2x1x⎥.⎝⎣ ⎦⎠⎣ − 2 ⎦3Finn T ⎛⎜⎡ ⎞⎢⎤⎟.−1⎥⎝⎣⎦⎠Løsning: Vi setter inn:⎛⎡ 3 ⎤⎞ ⎡2⋅ 3+1⎤⎡7⎤T ⎜⎢ ⎟= ⎢ =1 3 ( 1⎥−⎥− − )⎢4⎥.⎝⎣ ⎦⎠⎣ ⎦ ⎣ ⎦2 2I eksemplet ovenfor transformerte du fra til . Men det er ikke nødvendig åtransformere mellom vektorrom av samme dimensjon, slik neste eksempel viser.Eksempel <strong>6.</strong>2: En transformasjon er gitt ved⎡ x1− 2 ⎤⎛⎡x1⎤⎞T⎢x2 2x⎥⎜⎢ 1x⎥⎟= − .⎢ ⎥⎝⎣2 ⎦⎠ ⎢⎣x1⋅x ⎥2 ⎦2Finn T ⎛⎜⎡ ⎞⎢ ⎤⎟.1⎥⎝⎣ ⎦⎠Løsning: Vi setter inn:⎡ 2−2 ⎤ ⎡ 0 ⎤⎛⎡2⎤⎞T =⎢1−2⋅ 2⎥=⎢−3⎥⎜⎢ ⎟1⎥ .⎢ ⎥ ⎢ ⎥⎝⎣ ⎦⎠ ⎢⎣ 21 ⋅ ⎥⎦ ⎢⎣2⎥⎦Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 2Skal vi være pirkete, bør vi angi hvilket vektorrom vi transformerer fra, og hvilket vektorromvi transformerer til. En fullstendig definisjon av transformasjonen i eksemplet ovenfor børderfor se omtrent slik ut:2”En transformasjon T : → 3 er gitt ved … ” osv.<strong>6.</strong>2. Lineære transformasjoner.Vi skal nå definere lineære transformasjoner:La V og W være to vektorrom. En transformasjon T : V → W def.For alle vektorer u og v i V, og alle tall a og b, gjelder:T a⋅ u+ b⋅ v = a⋅ T u + b⋅Tv .( ) ( ) ( )er lineærVi kan også splitte opp betingelsen i to trinn:T + = T + T og T a⋅ v = a⋅Tv .( u v) ( u) ( v) ( ) ( )Lineære transformasjoner er hensiktsmessig av flere grunner. Foreløpig kan vi merke oss atdersom b1, b2, …, bner basisvektorer i et vektorrom, og vi ønsker å transformere vektorerav formenv= x1b1+ x2b2+ +xnbnover i et nytt vektorrom med en lineær transformasjon, blirT v = T xb + x b + + x b = x ⋅ T b + x ⋅ T b + + x ⋅Tb .( ) ( ) ( ) ( ) ( )1 1 2 2 n n 1 1 2 2n nVi kan altså nøye oss med å transformere basisvektorene og beholde koeffisientene urørt.Det kan fort bli plundrete å benytte definisjonen ovenfor til å undersøke om en transformasjoner lineær eller ikke, noe eksemplene nedenfor vil illustrere.3Eksempel <strong>6.</strong>3: En transformasjon T : → 3 er gitt ved⎛⎡x1⎤⎞⎡ 2x2⎤⎜T⎢x⎥⎟⎢2x1x⎥⎜ ⎟= − 3.⎢ ⎥ ⎢ ⎥⎜ x ⎟⎝⎢⎣ ⎥3⎦⎠⎢⎣x3+ 2x⎥1⎦Undersøk om denne transformasjonen er lineær.Løsning: Har to vilkårlige tall a og b, og danner to vektorer⎡u1⎤ ⎡v1⎤u =⎢u⎥⎢2 ⎥og v =⎢v⎥⎢2 ⎥.⎢⎣u⎥3 ⎦ ⎢⎣v ⎥3 ⎦Strategien går ut på at jeg finner T(a⋅ u+ b ⋅v ) for seg, og a⋅ T( u ) + b⋅T(v ) for seg, og serom de to uttrykkene er like.For den gitte transformasjonen erBjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
( u v)Forelesningsnotater i matematikk.Matriser – en innføring. Side 3⎛ ⎡u1⎤ ⎡v1⎤⎞ ⎛⎡a⋅ u1+ b⋅v1⎤⎞⎜ ⎟ ⎜ ⎟T a⋅ + b⋅ = T a⋅ ⎢u⎥+ b⋅ ⎢v⎥= T⎢a⋅ u + b⋅v⎥⎜ ⎢2⎥ ⎢2⎥⎟ ⎜⎢ 2 2⎥⎟⎜ u3 v ⎟ ⎜3a u3 b v ⎟⎣⎢ ⎦⎥ ⎣⎢ ⎦⎥ ⎣⎢ ⋅ + ⋅ ⎥3⎦⎝ ⎠ ⎝ ⎠( )( ) ( )( ) ( )( )( ) ( )( ) ( v + v )⎡ 2 a⋅ u2 + b⋅v2 ⎤ ⎡ 2 a⋅ u2 + b⋅v2⎢⎥ ⎢=⎢a⋅ u + b⋅v − a⋅ u + b⋅ v⎥=⎢a u − u + b v −v⎢⎣ a⋅ u + b⋅ v + a⋅ u + b⋅ v ⎦ ⎣a u + u + bVidere er⎛⎡u1⎤⎞ ⎛⎡v1⎤⎞⎡ 2u2 ⎤ ⎡ 2v2⎤⎜ ⎟ ⎜ ⎟a⋅ T( u) + b⋅ T( v)= a⋅ T⎢u⎥+ b⋅ T⎢v⎥= a⋅ ⎢u − u⎥+ b⋅ ⎢v −v⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠Vi ser at transformasjonen er lineær fordiT a⋅ u+ b⋅ v = a⋅ T u + b⋅Tv .( ) ( )1 1 3 3 1 3 1 33 32 ⎥ ⎢1 121 32 1 3⎢2⎥ ⎢2⎥ ⎢1 3⎥ ⎢1 3⎥⎢⎣u ⎥3⎦ ⎢⎣v ⎥3⎦ ⎢⎣u3 + 2u ⎥ ⎢1⎦ ⎣v3 + 2v⎥1⎦( )⎡ 2a⋅u2 ⎤ ⎡ 2b⋅v2 ⎤ ⎡ 2 a⋅ u2+ b⋅v2⎤⎢a u1 a u⎥ ⎢3b v1 b v⎥ ⎢⎥=⎢⋅ − ⋅⎥+⎢⋅ − ⋅3⎥=⎢au ( 1− u3) + bv ( 1−v3)⎥⎢⎣a⋅ u3 + 2a⋅u ⎥ ⎢1⎦ ⎣b⋅ v3 + 2b⋅v⎥1⎦⎢⎣au ( 3+ 2u1) + bv ( 3+ 2v1)⎥⎦( )⎤⎥⎥⎥⎦2Eksempel <strong>6.</strong>4: En transformasjon T : → 2 er gitt ved⎛⎡x1⎤⎞ ⎡x1+3⎤T ⎜⎢ x⎥⎟=⎢2x1x⎥.⎝⎣ ⎦⎠⎣ ⋅ 2 ⎦Undersøk om denne transformasjonen er lineær.Løsning: Følger samme strategi som i forrige eksempel, ved at jeg har to vilkårlige tall a og b,og danner to vektorer⎡u1⎤ ⎡v1⎤u = ⎢ ogu ⎥ v = ⎢⎣ 2 ⎦ v ⎥ .⎣ 2 ⎦For den gitte transformasjonen er⎛ ⎡u1⎤ ⎡v1⎤⎞ ⎛⎡a⋅ u1+ b⋅v1⎤⎞T( a⋅ u+ b⋅ v)= T⎜a⋅ ⎢ b Tu⎥+ ⋅ ⎢2v⎥⎟=⎜⎢ 2a u2b v⎥⎟⎝ ⎣ ⎦ ⎣ ⎦⎠ ⎝⎣ ⋅ + ⋅2⎦⎠⎡ a⋅ u1+ b⋅ v1+3 ⎤= ⎢( a⋅ u1+ b⋅v1)( a⋅ u2 + b⋅v⎥⎣2)⎦og⎛⎡u1⎤⎞ ⎛⎡v1⎤⎞ ⎡u1+ 3⎤ ⎡v1+3⎤a⋅ T( u) + b⋅ T( v)= a⋅ T⎜⎢ b T a bu⎥⎟+ ⋅ ⎜⎢ 2v⎥⎟= ⋅ ⎢2u1 u⎥+ ⋅⎢ 2v1 v⎥⎝⎣ ⎦⎠ ⎝⎣ ⎦⎠⎣ ⋅ ⎦ ⎣ ⋅2⎦⎡a⋅ u1+ b⋅ v1+ 3a+3b⎤= ⎢a⋅u1⋅ u2 + b⋅v1⋅v⎥⎣2 ⎦Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 4Her er verken første- eller andrekoordinaten like i de to uttrykkene. Altså er transformasjonenikke lineær fordiT a⋅ u+ b⋅v ≠ a⋅ T u + b⋅Tv .( ) ( )( )Det er flere grunner til at vi setter pris på lineære transformasjoner, blant annet denne:En transformasjony= T ( x)kun en matrise A slik at y = A⋅xer lineær hvis og bare hvis det eksisterer en ogVi skal ikke bevise denne setningen.Eksempel <strong>6.</strong>5: Vi henter transformasjonen fra Eksempel <strong>6.</strong>3, som vi vet er lineær:⎡y1⎤ ⎛⎡x1⎤⎞⎡ 2x2⎤⎢y⎥ ⎜2T⎢x⎥⎟⎢2x1x⎥⎢ ⎥= ⎜⎢ ⎥⎟= ⎢−3⎥.⎢y ⎜3x ⎟⎣ ⎥⎦ ⎝⎢⎣ ⎥ ⎢3⎦⎠⎣x3+ 2x 1⎥⎦Skriv denne transformasjonen på matriseform.Løsning: Ved å bruke regneregler for matrisemultiplikasjon, ser vi at⎡y1⎤ ⎡ 2x2⎤ ⎡0 2 0 ⎤ ⎡x1⎤⎢y⎥ ⎢2x1 x⎥ ⎢31 0 1⎥ ⎢x⎥.⎢ ⎥=⎢−⎥=⎢−⎥⋅⎢2⎥⎢⎣y ⎥3⎦ ⎢⎣x3 + 2x ⎥ ⎢1⎦ ⎣2 0 1 ⎥⎦ ⎢⎣x⎥3⎦Altså kan transformasjonen skrives⎡0 2 0 ⎤y = T ( x)=⎢1 0 1⎥⎢−⎥⋅x⎢⎣2 0 1 ⎥⎦Oppgave <strong>6.</strong>1.<strong>6.</strong>3. Noen vanlige transformasjoner.Hittil har vi snakket om transformasjoner fra et vektorrom til et annet. Men vi kan godttransformere en vektor x over i en ny vektor y i samme vektorrom. På denne måten kanvektorer flyttes, speiles, dreies osv.Vi skal nå se på noen slike transformasjoner som forekommer vanlig:• Translasjon (flytting).• Skalering (forstørring / forminskning).• Speiling.• Rotasjon.Vi skal illustrere disse transformasjonene med 2-dimensjonale geometriske vektorer, der envektorBjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 5⎡x1⎤x = ⎢x ⎥⎣ 2 ⎦transformeres over til en annen vektor⎡y1⎤ ⎛⎡x1⎤⎞y = ⎢ Ty⎥ = ⎜⎢ ⎟2x⎥ .⎣ ⎦ ⎝⎣ 2⎦⎠Etterpå skal vi se hvordan disse transformasjonene kan benyttes til å lage enkel 2-dimensjonal datagrafikk.<strong>6.</strong>3.1. Translasjon.x 2x⎡x⎤1= ⎢x ⎥2⎣⎦( , )P x x1 2y⎡α⎤Δ x = ⎢β ⎥⎣ ⎦⎡y⎤1= ⎢y ⎥2⎣⎦x 1Et punkt P har koordinatene ( x , x )1 2. Når vi skal flytte dettepunkt en strekning⎡α⎤Δ x = ⎢β ⎥ ,⎣ ⎦innfører vi vektoren⎡ x1⎤x = ⎢x ⎥⎣ 2 ⎦og bruker transformasjoneny ⎡ y1⎤ ⎡x1+α ⎤= x +Δ x ⇔ ⎢ =y⎥ ⎢2x2+ β⎥ .⎣ ⎦ ⎣ ⎦<strong>6.</strong>3.2. Skalering.Anta at førstekoordinaten til en vektor x skal forstørres med en faktor, mens andrekoordinatenskal forstørres med en faktoraltsåy ⎡y1⎤ ⎡k1⋅x1⎤= ⎢y⎥ = ⎢2k2⋅x⎥ .⎣ ⎦ ⎣ 2⎦k 2. Da får vi en ny vektor y. Transformasjonen blirMen dette kan skrives som en matrisemultiplikasjon:⎡y1⎤ ⎡k1⋅x1⎤ ⎡k1 0 ⎤ ⎡x1⎤⎢ Ky⎥ = ⎢2k2 x⎥ = ⎢ ⋅ ⇔ =20 k⎥ ⎢2x⎥ y A ⋅x.⎣ ⎦ ⎣ ⋅ ⎦ ⎣ ⎦ ⎣ 2⎦Matrisen⎡k10 ⎤AK= ⎢0 k ⎥⎣ 2 ⎦er derfor en skaleringsmatrise. Siden denne transformasjonen kan utføres som en matrisemultiplikasjon,bli dette en lineær transformasjon. Du ser sikkert selv hvordan vi kangeneralisere til et n-dimensjonalt vektorrom.k 1<strong>6.</strong>3.3. Speiling.Vi har mange forskjellige former for speiling. I et 2-dimensjonalt vektorrom kan du haspeiling om en linje eller speiling om et punkt. I et 3-dimensjonalt vektorrom kan du haBjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 8Heldigvis fins det en metode slik at også translasjon blir en lineær transformasjon. Vi må dautvide de vektorene som inngår med en ekstra koordinat, og denne settes konstant lik 1. I et 2-dimensjonalt vektorrom vil derfor vektorer av typen⎡x1⎤x = ⎢x ⎥⎣ 2 ⎦framstå som⎡x1⎤x =⎢x⎥⎢2 ⎥.⎢⎣1⎥⎦Da kan vi definere en translasjonsmatrise⎡1 0 α ⎤AT=⎢0 1 β⎥⎢ ⎥.⎢⎣0 0 1⎥⎦Når vi nå regner ut A x, får viT ⋅⎡y1⎤ ⎡1 0 α ⎤ ⎡x1⎤ ⎡x1+α ⎤⎢y⎥=⎢0 1 β⎥⋅⎢x⎥=⎢x + β⎥,⎢2⎥ ⎢ ⎥ ⎢2⎥ ⎢2⎥⎢⎣1 ⎥⎦ ⎢⎣0 0 1⎥⎦ ⎢⎣1⎥⎦ ⎢⎣ 1 ⎥⎦som er den vektoren vi skal ha med tillegg av den 3. ”kunstige” koordinaten med verdien 1.På samme måte kan vi definere utvidede matriser for de andre operasjonene. Vi summereropp for et 2-dimensjonalt vektorrom:⎡α⎤Translasjon en strekning Δ x = ⎢β ⎥ :⎣ ⎦⎡1 0 α ⎤Translasjonsmatrise AT=⎢0 1 β⎥⎢ ⎥.⎢⎣0 0 1⎥⎦Skalering med faktorer k 1 og k 2 :⎡k10 0⎤Skaleringsmatrise AK =⎢0 k20⎥⎢ ⎥.⎢⎣0 0 1⎥⎦Speiling:⎡1 0 0⎤om førsteaksen: AX=⎢0 −1 0⎥,⎢ ⎥⎢⎣0 0 1⎥⎦om andreaksen:⎡−1 0 0⎤AY=⎢0 1 0⎥⎢ ⎥.⎢⎣0 0 1⎥⎦Rotasjon en vinkel θ i et fast koordinatsystem:⎡cosθ−sinθ0⎤Rotasjonsmatrise AR=⎢sinθcosθ0⎥⎢ ⎥.⎢⎣0 0 1⎥⎦Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 10<strong>6.</strong>3.<strong>6.</strong> Litt datagrafikk.Vi skal nå se litt på datagrafikk i et plan. I prinsippet går dette ut på at figurer flyttes, dreies,skaleres og roteres. Vi skal for enkelhets skyld anta at figurene er bygd opp av rette linjer, slikat figurene kan defineres ved vektorer til hjørnene. Manipulering av figurene består da i atdisse vektorene transformeres slik vi har sett på. Heldigvis er alle transformasjonene lineære.La oss først se hvordan vi kan bygge opp en transformasjonsmatrise når en operasjon består iat en vektor transformeres m ganger etter hverandre. Vi tar da utgangspunkt i en vektor x somførst skal transformeres med matrisen A1, deretter med A2, osv opp til Am. Disse transformasjonenegir etter tur nye vektorerx = A xosv…1 1( ) ( )( ) ( )x = A x = A ⋅ A x = A ⋅A x2 2 1 2 1 2 1x = A x = A ⋅ A ⋅ A x = A ⋅A ⋅A x3 3 2 3 2 1 3 2 1Du ser sikkert at når vi har gjennomført alle vår m transformasjoner, erx = A ⋅⋅A ⋅Axm( )m2 1slik at en transformasjonsmatrise som foretar hele transformasjonen blirM = A ⋅⋅A ⋅Am2 1 .Legg for all del merke til rekkefølgen av matrisene: Matrisen til den transformasjonen somutføres først, står lengst til høyre. Matrisen til den siste transformasjonen står lengst tilvenstre. Her er det lett å surre med rekkefølgen – og du husker sikkert at vi ikke kan bytte omrekkefølgen når vi multipliserer matriser.Så skal vi se hvordan vi mest hensiktsmessig kan utføre transformasjonen. Vi antar da atfiguren vår er definert ved en rekke punkter A, B, osv med koordinater ( a1,a2), ( b 1, b 2 ) osv.Vi definerer da utvidede vektorer⎡a1⎤⎡b1⎤xA =⎢a⎥2, , osv.⎢ ⎥xB =⎢b⎥⎢2 ⎥⎢⎣1⎥⎦⎢⎣1⎥⎦Nå er det gunstig å samle alle disse vektorene i en punktmatriseP = x x .[ ]ABNår hver av vektorene xA, xB, … transformeres med samme transformasjon M, får vi nyevektorer som er gitt vedx ' = M⋅xA A ,x ,B' = M⋅xB … osv.Vi samler også disse vektorene i en punktmatriseP' = x ' x ' = M⋅x M⋅ x = M⋅ x x = M⋅P.[ ] [ ] [ ]A B A B A BOg dette er faktisk oppskriften på hvordan operasjonen utføresBjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 11Når lineære transformasjoner gitt ved matrisene A1, A2, osv opp til Amgjennomføres i denne rekkefølgen, får vi en samlet transformasjonsmatriseM = A ⋅⋅A ⋅Am2 1 .Koordinatene til punkter som transformeres samles i utvidede vektorer ,xB, … osv., som igjen samles i en punktmatriseP = x x .[ ]ABEtter transformasjonen er koordinatene til de transformerte punktene gitt vedutvidede vektorer x , x , … osv. som vi finner som kolonner i matrisenA 'B '[ ]P' = x ' x ' = M⋅P.ABx ANå er det på tide å se hvordan dette fungerer i praksis:Eksempel <strong>6.</strong>8: En trekant har hjørnene A( 2,1 ) , B5,3, ( ) ( )trekantens hjørner etter disse operasjonene:a) Trekanten speiles om ei rett linje gjennom A parallell med x-aksen.b) Trekanten roterer 120 o om hjørnet A (fra sin opprinnelige stilling).C1,4 . Finn koordinatene tilLøsning:C1,4 ( )A( 2,1)B5,3 ( )Vi starter med å samle alle hjørnene i en matrise med utvidedevektorer:⎡2 5 1⎤P =⎢1 3 4⎥⎢ ⎥.⎢⎣1 1 1⎥⎦a) Når vi skal speile om den stiplede linja gjennom A, må vi først flytte trekanten en enhetned slik at linja faller sammen med x-aksen, speile om denne aksen, og flytte en enhet oppigjen. De tre transformasjonsmatrisene blir⎡1 0 0 ⎤ ⎡1 0 0⎤⎡1 0 0⎤A⎢1= 0 1 −1⎥, ,⎢ ⎥A2=⎢0 1 0⎥⎢−⎥A3=⎢0 1 1⎥. ⎢ ⎥⎢⎣0 0 1 ⎥⎦⎢⎣0 0 1⎥⎦⎢⎣0 0 1⎥⎦Den samlede transformasjonsmatrisen blir⎡1 0 0⎤ ⎡1 0 0⎤ ⎡1 0 0 ⎤M = A3⋅A2⋅ A1=⎢0 1 1⎥ ⎢0 1 0⎥ ⎢0 1 1⎥⎢ ⎥⋅⎢−⎥⋅⎢−⎥⎢⎣0 0 1⎦⎥ ⎢⎣0 0 1⎥⎦⎢⎣0 0 1 ⎥⎦Da blir⎡1 0 0⎤ ⎡1 0 0⎤ ⎡1 0 0⎤=⎢0 1 1⎥⋅⎢0 − 1 1⎥=⎢0 −1 2⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣⎢0 0 1⎦⎥ ⎢⎣ 0 0 1⎥⎦ ⎢⎣0 0 1⎥⎦Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 12⎡1 0 0⎤ ⎡2 5 1⎤ ⎡2 5 1 ⎤P' = M⋅ P =⎢0 1 2⎥ ⎢1 3 4⎥ ⎢⎢−⎥⋅⎢ ⎥=⎢1 −1−2⎥⎥⎢⎣0 0 1⎥⎦ ⎢⎣1 1 1⎥⎦⎢⎣1 1 1 ⎥ ⎦slik at etter speilingen får hjørnene koordinateneB' 5, 1 C' 1, − 2 .A' ( 2,1 ), ( − ), ( )b) Vi skal først utføre en flytting slik at punktet A(2,1) faller i origo. Deretter kommerrotasjonen, og til slutt skal vi flytte tilbake. De tre transformasjonsmatrisene blir1 1⎡1 0 −2⎤⎡cos120 −sin120 0⎤⎡ − − 3 0⎤2 2A⎢1= 0 1 −1⎥ ⎢⎢⎥ ⎥ 1 1,⎢ ⎥A2 = ⎢sin120 cos120 0⎥= ⎢ 3 − 02 2⎥ ,⎢⎣0 0 1 ⎥⎦⎢ 0 0 1⎥⎢0 0 1⎥⎣ ⎦ ⎢⎣⎥⎦⎡1 0 2⎤A3=⎢0 1 1⎥. ⎢ ⎥⎢⎣0 0 1⎥⎦Den samlede transformasjonsmatrisen blir1 1⎡1 0 2⎤ ⎡ − − 3 0⎤2 2 ⎡1 0 −2⎤⎢⎥1 1M = A3⋅A2⋅ A1 =⎢0 1 1⎥3 0⎢0 1 1⎥⎢ ⎥⋅⎢−2 2⎥⋅ ⎢−⎥⎢0 0 1⎥ ⎢0 0 1⎥⎣ ⎦ ⎢⎣0 0 1 ⎥⎢⎣⎥⎦⎦ 1 1 1 1 1 1⎡1 0 2⎤ ⎡ − − 3 1+ 3⎤ ⎡ − − 3 3+3⎤2 2 2 2 2 2⎢1 1 1 1 1 30 1 1⎥ ⎢ ⎥ ⎢⎥=⎢ ⎥⋅⎢ 3 − − 3 3 32 2 2⎥ = ⎢ − −2 2 2⎥⎢0 0 1 ⎢0 0 1 ⎥ ⎢⎣ ⎥ ⎦ ⎣ ⎦ ⎣ 0 0 1⎥⎦Da blir⎡1 1 1− − 3 3+ 3⎤2 2 2 ⎡2 5 1⎤⎢ ⎥1 1 3P' = M⋅ P = 3 3 ⎢1 3 4 ⎥⎢ − −2 2 2⎥⋅⎢ ⎥⎢0 0 1⎥⎣ ⎦ ⎢ ⎣1 1 1 ⎥ ⎦⎡15 32 − 3 − 3 ⎤2 2 2 ⎡2 −1.23 0 ⎤⎢⎥3 1 1= 1 3 3⎢1 2.60 1.37⎥⎢− −2 2 2⎥≈ ⎢−⎥⎢1 1 1⎥⎣ ⎦ ⎣⎢1 1 1 ⎦⎥slik at etter rotasjonen om A får hjørneneC1,4 ( )koordinateneA' ( 2,1 ),B' ( − 1.23,2.60),C' ( 0, − 1.37).Situasjonen er illustrert til høyre.B' ( −1.23,2.60)A( 2,1)C' ( 0, −1.37)B5,3 ( )Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 13Oppgave <strong>6.</strong>3.<strong>6.</strong>4. Ortogonale transformasjoner.Vi har tidligere definert begrepet ortogonal matrise. La oss repetere:En kvadratisk matrise A er ortogonal def.Kolonnevektorene i matrisen utgjør et ortonormalt sett.A T ⋅ A = IMen vi vet også at− 1A ⋅ A = I. Siden matrisen A kun har en invers matrise, har vi atA er ortogonalA− 1 T= ADette er en matnyttig setning. Dersom du vet at en matrise er ortogonal, finner du den inversematrisen rett og slett ved å transponere! Og transponering er jo mye enklere enn å beregneinvers matrise.Eksempel <strong>6.</strong>9: Vi har matrisen⎡1 1− 3⎤2 2A = ⎢ ⎥1 1⎢⎣32 2⎥⎦a) Vis at matrisen er ortogonal ved å beregne A T ⋅ A.−1b) Beregn A , og bruk dette til å vise at matrisen er ortogonal.Løsning:Ombytting av rekker og kolonner gir direkte at⎡1 13⎤T 2 2A = ⎢ ⎥.1 1⎢⎣−32 2⎥⎦a) Da blir⎡1 1 1 13⎤ ⎡ − 3⎤T2 2 2 2A ⋅ A = ⎢ ⎥⋅⎢ ⎥1 1 1 1⎢⎣−32 2⎥⎦ ⎢⎣ 32 2⎥⎦⎡ 1 1 1 1 1 1 1 1⋅ + 3⋅ 3 ⋅2 2 2 2 2 ( − 32 ) + 3⋅⎤2 2 ⎡1 0⎤= ⎢⎥ =1 1 1 1 1 1 1 1 ⎢3 32 2 2 2 ( 32 ) 3 0 1 ⎥ =I⎢ ⎥⎢− ⋅ + ⋅ − ⋅ + ⋅ ⎣ ⎦⎣2 2 2⎥⎦som viser at A er ortogonal.Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 141 1 1 11 1 ⎡ 3⎤ 2 2 1⎡ 3⎤−2 2b) A = ⎢ ⎥ = ⎢ ⎥ = A1 1 1 1 1 1 1 1⋅ −2 2 ( − 32 ) ⋅ 3 − 3 1 − 32⎢⎣ 2 2⎥⎦ ⎢⎣ 2 2⎥⎦som også viser at A er ortogonal.TDa vi beregnet determinanten til A i del b) av eksemplet over, fant vi atingen tilfeldighet. Vi kan nemlig vise at:det ( A)= 1. Dette varA er ortogonal ⇒ ( A )det = ± 1Merk at implikasjonen går bare en vei. Det fins mange matriser som har determinant medverdi lik ±1 uten å være ortogonale.TTBevis: A er ortogonal ( ) ( )Men⇔ A⋅ A = I ⇒ det A⋅ A = det I = 1.( TT2A A ) ( A) ( A ) ( ( A)) ( A )Tder jeg benytter at det ( A ) = det ( A ) .det ⋅ = det ⋅ det = det = 1 ⇔ det =± 1Du husker sikkert at når x og y er to vektorer og A er en matrise av passe størrelse, så kany = A⋅xoppfattes som en lineær transformasjon fra ett vektorrom til et annet. Dessuten har vi at:Dersom A er en ortogonal matrise, sier vi at transformasjoneny = A⋅xer ortogonal.Du husker sikkert også at dersom kolonnene i A er koeffisientene til basisvektorene i vektorrommettil y uttrykt ved basisvektorene i vektorrommet til x, kan matriselikningen y = A⋅xbrukes til å transformere vektorer mellom disse to vektorrommene. Dermed ser vi direkte atdersom basisvektorene er innbyrdes ortogonale enhetsvektorer, blir transformasjonsmatrisenA ortogonal.Slike ortogonale transformasjoner har en viktig egenskap:Dersom et sett geometriske vektorer transformeres med en ortogonaltransformasjon, vil vektorenes lengder og vinklene mellom vektorene bevares.Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
Forelesningsnotater i matematikk.Matriser – en innføring. Side 15Bevis: La og x være to vektorer i et vektorrom. La viderex12y1 = A⋅x1og y2 = A⋅x2være ortogonale transformasjoner av og x til et annet vektorrom. Da blirT( ) ( )x12y iy = y ⋅ y = A⋅x ⋅ A⋅ x = x ⋅A ⋅A⋅ x = x ⋅ x = x ixT T TT1 2 1 2 1 2 1 2 1 2 1 2der jeg har benyttet at A T ⋅ A = I.Hvis vi setter y1 = y2= y og x1 = x2= x, bliry = yiy = xix = xsom viser at normen (lengden) til en vektor ikke endres.Videre ery iy = y ⋅ y ⋅cos ∠y , y( )1 2 1 2 1 2y iyx ix⇔ cos ∠ , = = = cos ∠ ,1 2 1 2( y y ) ( x x )1 2 1 2y1 ⋅ y2 x1 ⋅ x2Altså er vinklene mellom vektorene bevart.Dette fører til at en figur som transformeres over i et annet koordinatsystem med en ortogonaltransformasjon, vil bevare størrelse og form. Figuren kan imidlertid bli speilvendt. Dette skjerdersom det A =−1.( )Eksempel <strong>6.</strong>10:a) Du husker sikkert at speiling om første- eller andreaksen utføres med speilingsmatrisene⎡1 0 ⎤ ⎡−1 0⎤AX= ⎢ og0 −1⎥ AY= ⎢⎣ ⎦0 1 ⎥⎣ ⎦Vis at disse matrisene er ortogonale med determinant lik -1.b) Du husker sikkert at rotasjon en vinkel θ utføres med rotasjonsmatrisen⎡cosθ−sinθ⎤AR= ⎢sinθcosθ⎥⎣⎦Vis at denne matrisen er ortogonal med determinant lik 1.Løsning: Velger å vise ata) For matrisen blirA XA T ⋅ A = IA T ⎡1 0 ⎤ ⎡1 0 ⎤ ⎡1 0⎤X⋅ A X= ⎢ ⋅ = =0 −1 ⎥ ⎢0 −1 ⎥ ⎢0 1⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦IVidere erdet A = 1⋅ −1 −0 ⋅ 0 = −1( ) ( )Xfor å vise at matrisene er ortogonale.som bekrefter at transformasjonen bevarer lengder og vinkler, men gir en speiling. Formatrisen får vi helt tilsvarende regninger og konklusjoner.A YBjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.
)Forelesningsnotater i matematikk.Matriser – en innføring. Side 16T ⎡ cosθ sinθ⎤ ⎡cosθ −sinθ⎤A ⋅ A= ⎢sinθ cosθ ⎥⋅⎢ sinθ cosθ⎥⎣−⎦ ⎣ ⎦2 2⎡ cos θ + sin θ −cosθ ⋅ sinθ + cosθ ⋅sinθ⎤⎡1 0⎤= ⎢ 2 2 ⎥ = ⎢cosθ sinθ cosθ sinθ cos θ sin θ 0 1⎥ =I⎣− ⋅ + ⋅ + ⎦ ⎣ ⎦2( ) ( )det A = cos θ − −sinθ ⋅sinθ= 1som bekrefter at det ikke er speiling.Alle disse transformasjonene vil derfor bevare lengder og vinkler.Oppgave <strong>6.</strong>4.Bjørn Davidsen, <strong>Universitetet</strong> i Tromsø. 2010.