Estruturas Reticuladas Planas Hiperstáticas - Dem Isep
Estruturas Reticuladas Planas Hiperstáticas - Dem Isep
Estruturas Reticuladas Planas Hiperstáticas - Dem Isep

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
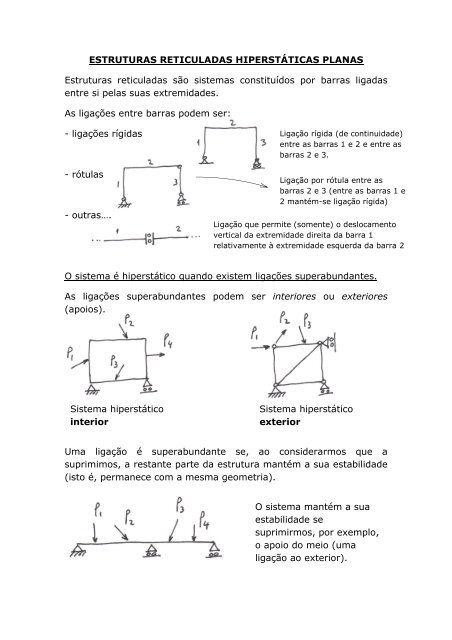
ESTRUTURAS RETICULADAS HIPERSTÁTICAS PLANAS<br />
<strong>Estruturas</strong> reticuladas são sistemas constituídos por barras ligadas<br />
entre si pelas suas extremidades.<br />
As ligações entre barras podem ser:<br />
- ligações rígidas<br />
- rótulas<br />
- outras….<br />
O sistema é hiperstático quando existem ligações superabundantes.<br />
As ligações superabundantes podem ser interiores ou exteriores<br />
(apoios).<br />
Sistema hiperstático<br />
interior<br />
Ligação rígida (de continuidade)<br />
entre as barras 1 e 2 e entre as<br />
barras 2 e 3.<br />
Ligação por rótula entre as<br />
barras 2 e 3 (entre as barras 1 e<br />
2 mantém-se ligação rígida)<br />
Ligação que permite (somente) o deslocamento<br />
vertical da extremidade direita da barra 1<br />
relativamente à extremidade esquerda da barra 2<br />
Sistema hiperstático<br />
exterior<br />
Uma ligação é superabundante se, ao considerarmos que a<br />
suprimimos, a restante parte da estrutura mantém a sua estabilidade<br />
(isto é, permanece com a mesma geometria).<br />
O sistema mantém a sua<br />
estabilidade se<br />
suprimirmos, por exemplo,<br />
o apoio do meio (uma<br />
ligação ao exterior).
Num sistema hiperstático as equações de equilíbrio estático não são<br />
suficientes para determinar as reacções nos apoios e/ou as forças<br />
interiores.<br />
Exemplos:<br />
A barra biarticulada pode ser<br />
suprimida, mantendo-se a parte<br />
restante da estrutura estável (com<br />
geometria invariável). Neste caso<br />
pode suprimir-se uma ligação<br />
interior.<br />
É impossível calcular as<br />
reacções nos apoios só com as<br />
equações da estática o que<br />
implica a impossibilidade de<br />
traçar o diagrama de<br />
momentos flectores.<br />
É impossível calcular os<br />
esforços axiais nas barras<br />
só com as equações da<br />
estática (contudo, podem<br />
determinar-se as reacções<br />
nos apoios).<br />
Antes de prosseguir o estudo dos sistemas hiperstáticos, vamos<br />
sistematizar o estudo das ligações numa estrutura reticulada e em<br />
particular as ligações ao exterior (apoios).
Apoios simples ou deslizantes serão considerados como apoios<br />
de uma biela:<br />
≡<br />
Notar que um apoio simples gera uma única incógnita de reacção,<br />
equivalente ao esforço axial na biela.<br />
Apoios duplos ou de rótula fixa serão considerados como apoios<br />
de duas bielas:<br />
≡<br />
Notar que um apoio duplo gera 2 incógnitas de reacção, equivalentes<br />
aos esforços axiais nas 2 bielas.<br />
Apoios triplos ou de encastramento podem ser considerados<br />
como apoios de três bielas (nem sempre isso é vantajoso). Para que o<br />
encastramento seja perfeito é necessário considerar que a<br />
distância l seja um infinitésimo ou que a viga de comprimento l<br />
seja infinitamente rígida.<br />
≡<br />
Não<br />
confundir<br />
com →<br />
Não<br />
confundir<br />
com →<br />
Notar que um apoio de encastramento gera 3 incógnitas de reacção,<br />
equivalentes aos esforços axiais nas 3 bielas.
Ligação rígida entre duas barras numa dada secção é<br />
equivalente à ligação por 3 bielas entre elas, conforme se mostra:<br />
As 3 bielas impedem a existência de qualquer movimento relativo<br />
entre as duas partes. Nomeadamente, ficam impedidos os<br />
deslocamentos relativos na direcção vertical e na horizontal, e a<br />
rotação relativa.<br />
No modelo das 3 bielas, os seus 3 esforços axiais são equivalentes<br />
(leia-se, linearmente dependentes) aos 3 esforços na secção:<br />
momento flector (M), esforço axial (N) e esforço cortante (T).<br />
Grau de Hiperstaticidade de uma estrutura (GH)<br />
É o número de ligações superabundantes que uma estrutura possui e<br />
cuja eliminação transformaria o sistema dado num sistema isostático<br />
de geometria invariável.<br />
Entende-se que um sistema possui geometria invariável - ou é<br />
geometricamente estável - todo aquele que não pode mudar de<br />
configuração sem deformação dos seus elementos. Os sistemas que<br />
podem mudar de configuração, independentemente de haver ou não<br />
deformação dos seus elementos, são sistemas hipostáticos (ou<br />
mecanismos).
Os sistemas isostáticos não possuem nenhuma ligação<br />
superabundante. A eliminação de uma só ligação transformaria<br />
sempre estes sistemas em hipostáticos (ou mecanismos).<br />
A viga a) da figura ao lado constitui<br />
um sistema com um grau de<br />
hiperstaticidade porque, como vimos<br />
anteriormente, uma das ligações ao<br />
solo (apoio) é superabundante.<br />
Retirando uma qualquer das bielas de<br />
apoio – fig. b) – ou introduzindo na<br />
viga uma articulação – fig. c) – obterse-á<br />
um sistema isostático de<br />
geometria invariável.<br />
O quadro rígido da figura a) à<br />
esquerda é um sistema hiperstático<br />
com 3 graus de hiperstaticidade<br />
porque a sua transformação em<br />
sistema isostático requer que se<br />
seccione um dos seus elementos –<br />
ver fig. b) – o que equivale a<br />
suprimir 3 ligações internas. Estas são, como vimos, as<br />
correspondentes aos 3 esforços internos na secção: momento flector<br />
(M), esforço normal (N) e esforço de corte (T). As equações<br />
fornecidas pela estática não permitem determinar estes esforços.<br />
Todo o contorno fechado encontra-se, sob o ponto de vista estático,<br />
nas mesmas condições. Os quadros e contornos fechados planos de<br />
nós rígidos constituem sempre sistemas de 3 graus de<br />
hiperstaticidade.<br />
Os pórticos das figuras a) e b) ao<br />
lado constituem exemplos de<br />
sistemas idênticos. No pórtico<br />
encastrado da fig. b) o solo pode<br />
ser considerado como uma barra de<br />
rigidez infinita.
O sistema representado na figura a) abaixo possui uma rótula no<br />
centro da travessa superior. Numa secção considerada pelo<br />
alinhamento desta articulação não teremos senão dois esforços<br />
internos: N e T. Por consequência o contorno superior é 2 vezes<br />
hiperstático, enquanto que o grau de hiperstaticidade da estrutura<br />
completa é igual a 5, porque o contorno inferior é fechado o que<br />
introduz mais 3 graus de hiperstaticidade ao sistema.<br />
Note-se que para um sistema hiperstático dado, a eliminação das<br />
ligações superabundantes, transformando o sistema num isostático,<br />
pode, em geral, ser feita de várias maneiras diferentes, mas o<br />
número de ligações suprimidas permanece sempre o mesmo. Assim,<br />
no exemplo da figura seguinte, os sistemas isostáticos b) e c) foram<br />
obtidos partindo do mesmo sistema hiperstático a) – um por<br />
eliminação de uma ligação de apoio e o outro por introdução de uma<br />
rótula, isto é, por eliminação da ligação que se opunha à rotação<br />
relativa dos dois troços de viga situados de uma parte e da outra da<br />
articulação. O sistema da fig. c) é conhecido, como se deve saber,<br />
por arco de três rótulas.
Fixemos que a introdução de uma articulação (ou rótula) numa<br />
qualquer secção de um barra ou a substituição de um nó rígido por<br />
um nó articulado numa qualquer estrutura hiperstática faz baixar o<br />
seu grau de hiperstaticidade de uma unidade. Daqui em diante<br />
designaremos este tipo de articulações como articulação simples.<br />
Ao eliminar as ligações superabundantes de um sistema hiperstático<br />
é sempre necessário verificar a invariabilidade geométrica do<br />
sistema. No seguinte exemplo com um grau de hiperstaticidade - fig.<br />
a) - a eliminação da biela vertical do apoio da direita - fig. b) - não é<br />
possível porque transformaria o sistema num outro de geometria<br />
variável (pode haver rotação em torno do ponto A que é ponto de<br />
intersecção das 3 reacções de apoio). O mesmo já não se passa com<br />
o sistema da fig. c) que é de geometria invariável e isostático.<br />
Para os sistemas hiperstáticos complicados, a determinação do grau<br />
de hiperstaticidade pode fazer-se baseando-nos no facto de que cada<br />
articulação introduzida num nó onde se encontram K barras baixa o<br />
grau de hiperstaticidade (K-1), porque uma tal articulação substitui<br />
(k-1) articulações simples.
Pode então deduzir-se que para determinar o grau de hiperstaticidade<br />
de um sistema é necessário multiplicar por 3 o número de contornos<br />
fechados e, de seguida, subtrair ao número obtido o número total de<br />
articulações simples. Deve tomar-se o cuidado de considerar o solo<br />
como uma única barra (de rigidez infinita) ligando todos os pontos de<br />
apoio. Assim, temos que,<br />
GH=3C-A<br />
em que GH é o grau de hiperstaticidade, C é o número de contornos<br />
fechados da estrutura e A o número de articulações simples que<br />
possui.<br />
Para a estrutura representada na fig. a) seguinte, podemos<br />
contabilizar - ver fig. b) – C=8 contornos fechados e A=20<br />
articulações simples. Logo o grau de hiperstaticidade da estrutura é<br />
G=3x8-20=4
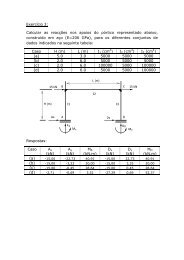
Exercícios:<br />
Para cada uma das estruturas representadas calcule o seu grau de<br />
hiperstaticidade e desenhe uma possível correspondente estrutura<br />
isostática.