RM Rodrigues1.2, CFF Costa Filho1.2, MGF Costa1.2 1Centro ... - Fei
RM Rodrigues1.2, CFF Costa Filho1.2, MGF Costa1.2 1Centro ... - Fei
RM Rodrigues1.2, CFF Costa Filho1.2, MGF Costa1.2 1Centro ... - Fei

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
VERIFICAÇÃO DE IMPRESSÕES DIGITAIS USANDO MODELO DE VETOR CARACTERÍSTICO BASEADO EM GRA-<br />
FOS PLANARES<br />
R. M. Rodrigues 1.2 , C. F. F. <strong>Costa</strong> Filho 1.2 , M. G. F. <strong>Costa</strong> 1.2<br />
1 Centro de Tecnologia Eletrônica e da Informação/UFAM, Manaus, AM, Brazil.<br />
1. 2 Programa de Pós-graduação em Engenharia Elétrica/UFAM<br />
E-mails: ramyses@globo.com, ccosta@ufam.edu.br, mcosta@ufam.edu.br<br />
Abstract This paper describes a characteristic vector model for fingerprint representation that uses planar graph and triangulation<br />
algorithms. It is shown that this characteristic vector model presents a better performance in a fingerprint verification<br />
system when compared with others vector models already proposed in literature. In this paper is also presented a feature extraction<br />
method that explores the duality ridge ending/ridge bifurcation. It is shown that this new extraction method simplifies the<br />
computational complexity and decreases the error detection of a fingerprint identification system.<br />
Keywords Biometric system, fingerprint, triangulation, minutiae, planar graph.<br />
Resumo Este artigo descreve um modelo de vetor característico para representação de impressões digitais que usa grafos planares<br />
e algoritmos de triangulação. Será demonstrado que este modelo apresenta uma melhor performance em um sistema automático<br />
de verificação quando comparado a outros modelos já propostos na literatura. Também é apresentado neste artigo um método<br />
para extração de características (minúcias) que explora a dualidade “terminação/bifurcação”. É demonstrado que esse novo<br />
método de extração simplifica a complexidade computacional e diminui a quantidade de erros de detecção para um sistema de<br />
verificação automático.<br />
Palavras-chave Sistemas biométricos, impressão digital, triangulação, minúcias, grafos planares.<br />
1 Introdução<br />
De acordo com Maltoni et al (2005), um sistema de<br />
verificação biométrico é composto por estágios que<br />
realizam tarefas sequenciais e interdependentes,<br />
como mostra o diagrama da Figura 1. O resultado<br />
desse processo é baseado em um grau de similaridade,<br />
usualmente um número contido no intervalo<br />
[0,1], que relaciona a probabilidade de duas características<br />
biométricas serem provenientes de uma<br />
mesma fonte. No caso de duas impressões digitais, se<br />
elas são provenientes de um mesmo dedo.<br />
Para essa característica, de acordo com Stoney<br />
(1985), é de até 1.2 x 10 -80 a probabilidade de um par<br />
de impressões digitais, ser considerado genuíno, isto<br />
é, proveniente de um mesmo dedo. Em sentido inverso,<br />
é denominado par impostor duas impressões<br />
digitais provenientes de dedos diferentes.<br />
2 Sistemas de Verificação de Impressões Digitais<br />
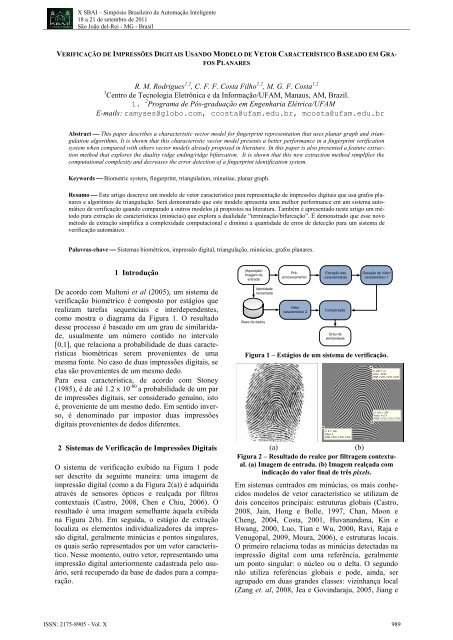
O sistema de verificação exibido na Figura 1 pode<br />
ser descrito da seguinte maneira: uma imagem de<br />
impressão digital (como a da Figura 2(a)) é adquirida<br />
através de sensores ópticos e realçada por filtros<br />
contextuais (Castro, 2008, Chen e Chiu, 2006). O<br />
resultado é uma imagem semelhante àquela exibida<br />
na Figura 2(b). Em seguida, o estágio de extração<br />
localiza os elementos individualizadores da impressão<br />
digital, geralmente minúcias e pontos singulares,<br />
os quais serão representados por um vetor característico.<br />
Nesse momento, outro vetor, representando uma<br />
impressão digital anteriormente cadastrada pelo usuário,<br />
será recuperado da base de dados para a comparação.<br />
(Aquisição)<br />
Imagem de<br />
entrada<br />
Identidade<br />
reclamada<br />
Base de dados<br />
Préprocessamento<br />
Vetor<br />
característico 2<br />
Extração das<br />
características<br />
Comparação<br />
Grau de<br />
similaridade<br />
Geração do Vetor<br />
característico 1<br />
Figura 1 – Estágios de um sistema de verificação.<br />
50 100 150 200 250 300 350<br />
(a)<br />
(b)<br />
Figura 2 – Resultado do realce por filtragem contextual.<br />
(a) Imagem de entrada. (b) Imagem realçada com<br />
indicação do valor final de três pixels.<br />
Em sistemas centrados em minúcias, os mais conhecidos<br />
modelos de vetor característico se utilizam de<br />
dois conceitos principais: estruturas globais (Castro,<br />
2008, Jain, Hong e Bolle, 1997, Chan, Moon e<br />
Cheng, 2004, <strong>Costa</strong>, 2001, Huvanandana, Kin e<br />
Hwang, 2000, Luo, Tian e Wu, 2000, Ravi, Raja e<br />
Venugopal, 2009, Moura, 2006), e estruturas locais.<br />
O primeiro relaciona todas as minúcias detectadas na<br />
impressão digital com uma referência, geralmente<br />
um ponto singular: o núcleo ou o delta. O segundo<br />
não utiliza referências globais e pode, ainda, ser<br />
agrupado em duas grandes classes: vizinhança local<br />
(Zang et. al, 2008, Jea e Govindaraju, 2005, Jiang e<br />
ISSN: 2175-8905 - Vol. X 989<br />
50<br />
100<br />
150<br />
200<br />
250<br />
300<br />
350<br />
50<br />
100<br />
150<br />
200<br />
250<br />
300<br />
350<br />
X: 8 Y: 306<br />
Index: 0<br />
RGB: 0.502, 0.502, 0.502<br />
X: 236 Y: 21<br />
Index: -49.67<br />
RGB: 0.235, 0.235, 0.235<br />
X: 241 Y: 280<br />
Index: 41.73<br />
RGB: 0.725, 0.725, 0.725<br />
50 100 150 200 250 300 350
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
Yau, 2000, Mital e Teoh, 1997, Ratha et. al., 2000) e<br />
triangulação (Bebis, Deaconu e Georgiopoulos,<br />
1999, Liang, Bishnu e Asano, 2007, Liu, Yin e<br />
Zhang, 2005). Ambos apresentam propriedades vantajosas<br />
para sistemas computacionais.<br />
A escolha do modelo a ser utilizado depende da aplicação.<br />
Em sistemas comerciais de controle de acesso,<br />
por exemplo, onde existem dispositivos ópticos especializados<br />
para coleta de impressões digitais, os modelos<br />
globais são mais utilizados, pois nesses sistemas<br />
sempre estarão disponíveis impressões digitais<br />
completas, com imagens de boa qualidade e pontos<br />
singulares bem definidos. Por outro lado, em sistemas<br />
de bases de dados criminais, como os presentes<br />
nas polícias, são necessários modelos que permitam a<br />
comparação de imagens de impressões digitais de<br />
baixa ou média qualidade e parciais, geralmente sem<br />
núcleos ou deltas, sendo as estruturas locais a melhor<br />
escolha.<br />
Foram destacados na Figura 1 os estágios desse sistema<br />
que receberam as contribuições deste artigo. A<br />
primeira delas consiste em um método de detecção<br />
de minúcias de maior confiabilidade e menor complexidade<br />
computacional. A segunda, em um modelo<br />
de vetor característico que explora as vantagens dos<br />
dois modelos de estruturas locais mais conhecidos.<br />
Nas demais seções deste artigo serão descritos o<br />
método de extração de características proposto, os<br />
conceitos de grafos planares e sua geração através da<br />
triangulação para a construção do modelo de vetor<br />
característico proposto e a comparação, finalizando<br />
com o resultado dos testes de desempenho e conclusões.<br />
2 Extração das características<br />
Uma minúcia é um evento anormal presente no fluxo<br />
das linhas dactilares que por padrão correm paralelamente<br />
umas às outras. Elas são fortes elementos<br />
individualizadores de uma impressão digital sendo,<br />
para efeitos práticos em sistemas computacionais,<br />
divididas em dois tipos: terminações e bifurcações<br />
(Figura 3). Cada minúcia é representada por uma<br />
posição, uma direção e um tipo.<br />
Palmer et. al. (2008) localiza essas características<br />
avaliando a vizinhança de um pixel em uma janela<br />
3x3 de uma imagem de impressão digital esqueletonizada<br />
(linhas dactilares com largura de 1 pixel),<br />
computando suas coordenadas espaciais e o tipo. A<br />
determinação da direção envolve a análise da orientação<br />
das linhas na posição da minúcia, sendo a direção<br />
da terminação mostrada na Figura 3(a) e a da<br />
bifurcação na Figura 3(b). Quando o estágio de esqueletonização<br />
produz os artefatos mostrados nas<br />
Figuras 4(a) e 4(b), determinar esse parâmetro se<br />
torna uma tarefa extremamente difícil. No primeiro<br />
caso, o sistema tem dificuldades em decidir se há<br />
duas bifurcações em oposição ou se ocorreu alguma<br />
imperfeição no processo de esqueletonização. No<br />
segundo, como determinar se os cruzamentos produ-<br />
zidos são, de fato, bifurcações bem como o sentido<br />
da direção.<br />
(a)<br />
(b)<br />
Figura 3 – (a) Minúcia tipo terminação e sua direção.<br />
(b) Minúcia tipo bifurcação e sua direção.<br />
(a)<br />
(b)<br />
Figura 4 – Artefatos produzidos pelo processamento<br />
morfológico de esqueletonização que dificultam o cômputo<br />
de bifurcações.<br />
Para contornar esse problema, será explorada uma<br />
interessante propriedade das minúcias conhecida<br />
como dualidade terminação/bifurcação. Como pode<br />
ser visto na Figura 5, as bifurcações em uma imagem<br />
normal (Figura 5(a)) são vistas como terminações na<br />
mesma imagem invertida (Figura 5(b)), sendo a recíproca<br />
verdadeira.<br />
ISSN: 2175-8905 - Vol. X 990<br />
(c)<br />
(d)<br />
Figura 5 – Propriedade da dualidade terminação/bifurcação.<br />
Nossa proposta, que pode ser resumida no diagrama<br />
em blocos da Figura 6(a), utiliza duas imagens complementares,<br />
obtidas após a binarização da imagem<br />
realçada, esqueletonizadas individualmente. As terminações<br />
serão localizadas na imagem esqueleto<br />
original e as bifurcações, na imagem esqueleto invertida.<br />
Dessa forma, a tarefa de extrair todas as minúcias<br />
de uma impressão digital resumir-se-á em localizar<br />
e determinar a direção de terminações, apenas.<br />
Os estágios de limpeza garantirão maior robustez ao<br />
sistema, eliminando linhas de pequeno comprimento,<br />
ruídos do tipo spike e minúcias encontradas nas bordas<br />
da imagem. A Figura 6(b) mostra uma imagem de<br />
impressão digital esqueletonizada e suas minúcias<br />
detectadas pelo método proposto, enquanto as Figuras<br />
6(c) e 6(d) mostram imagens de estágios intermediários<br />
de nosso sistema de teste. As Figuras 6(e) e 6(f)<br />
mostram como os artefatos exibidos na Figura 4(a)<br />
desaparecem no esqueleto da imagem dual.<br />
Na saída desse estágio, o conjunto das N minúcias<br />
válidas detectadas (terminações e bifurcações) serão<br />
representadas pelo vetor [x, y, φ, t]i, 1 < i < N, respectivamente,<br />
coordenadas espaciais (x,y), direção
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
absoluta φ e tipo. Outros parâmetros individualizadores<br />
também podem ser inseridos nesse vetor, como<br />
coordenadas e direção dos pontos singulares e quantidade<br />
de linhas entre minúcias.<br />
Imagem Inicial<br />
(normal/Invertida)<br />
Localização das<br />
minúcias<br />
(Terminações)<br />
Eliminação de<br />
falsas minúcias<br />
(a)<br />
(c)<br />
Limpeza do<br />
esqueleto<br />
(normal/invertida)<br />
Determinação da<br />
direção<br />
N minúcias<br />
(terminação/<br />
bifurcação)<br />
[x,y,φ, t]<br />
(b)<br />
(d)<br />
(e)<br />
(f)<br />
Figura 6 – (a) Diagrama em blocos do estágio de extração<br />
proposto. (b) Minúcias detectadas pelo método<br />
proposto (Vermelho: terminações. Azul: bifurcações).<br />
(c), (d), (e) e (f) imagens intermediárias do sistema de<br />
teste mostrando a efetividade da propriedade da dualidade<br />
– coluna esquerda: imagem normal; coluna direita:<br />
imagem invertida.<br />
3 Grafos planares e triangulação<br />
Um grafo G é formado por um conjunto de vértices,<br />
denotado por V(G), e um conjunto de arestas, denotado<br />
por A(G) (Paulo, Yoshiharu e Yoshiko, 2004).<br />
No contexto desse trabalho, os vértices são as minúcias<br />
da impressão digital e as arestas, segmentos de<br />
reta que as interligam. Segundo Berg, Cheong e<br />
Kreveld (2008), a triangulação de um conjunto de<br />
pontos P = {p1, p2, ..., pn} é um grafo planar G onde<br />
a quantidade de arestas conectando dois vértices é tal<br />
que não é mais possível acrescentar uma nova aresta<br />
sem destruir a sua planaridade. Ou seja, não será<br />
mais possível conectar dois vértices sem cruzar as<br />
arestas já existentes.<br />
Há várias maneiras de se triangular o conjunto P,<br />
mas apenas uma é ótima (Berg, Cheong e Kreveld,<br />
2008). Uma triangulação é ótima quando ela maximiza<br />
o ângulo mínimo dos triângulos gerados, ou<br />
seja, gera o máximo de triângulos eqüiláteros (ângulo<br />
mínimo = 60 graus). A triangulação de Delaunay<br />
possui essa característica, além da sua unicidade de<br />
malha e imunidade a ruídos. (Moura, 2006). De fato,<br />
como pode ser observado na Figura 7, a ausência/presença<br />
do ponto destacado (que pode ser um<br />
ruído) afetou apenas localmente as duas triangulações.<br />
(a)<br />
(b)<br />
Figura 7 – A presença/ausência de um ponto no grafo<br />
afetou apenas localmente as triangulações.<br />
4 Geração do vetor característico<br />
A unicidade de malha e a imunidade à ruídos do<br />
grafo de Delaunay serão exploradas para a construção<br />
do vetor característico proposto. O diagrama em<br />
blocos da Figura 8 mostra como ele é gerado a partir<br />
dessa triangulação.<br />
Conjunto de N<br />
minúcias (x,y,φ)<br />
Montagem do<br />
vetor (minúcias +<br />
triplas)<br />
Geração do grafo<br />
(triangulação)<br />
Computação dos<br />
vértices<br />
adjacentes (triplas<br />
{d,θ,dφ})<br />
Codificação do sub-grafo<br />
Sub-grafos em<br />
sistema de<br />
coordenadas<br />
polares<br />
Identificação dos<br />
N sub-grafos<br />
Figura 8 – (a) Modelagem proposta para o vetor característico,<br />
utilizando apenas os elementos [x, y, φ].<br />
As coordenadas espaciais das N minúcias detectadas<br />
no estágio de extração serão os parâmetros de entrada<br />
da função que gera o grafo de Delaunay (Figuras<br />
9(a) e 9(b)). Após, cada elemento de N (representado<br />
pela tripla [x, y, φ]) será visto como o centro de um<br />
sub-grafo, formado pelo ponto Ni e todos os vértices<br />
a ele conectados pela malha da triangulação, conforme<br />
pode ser visualizado nas Figuras 9(c) e 9(d).<br />
Dado que cada minúcia formará um sub-grafo distinto,<br />
existirão, no total, N sub-grafos possíveis, cada<br />
um associado a uma minúcia Ni. A próxima etapa do<br />
algoritmo codifica cada sub-grafo em coordenadas<br />
polares, através das Equações (1), (2) e (3), sendo [xc,<br />
yc, φc] e [xn, yn, φn] as coordenadas dos pontos central<br />
e vizinho, d o tamanho do vértice, θ a direção e dφ a<br />
diferença direcional entre central e vizinho, tornando,<br />
desse modo, o vetor característico imune a rotações e<br />
pequenas distorções (Jain, Hong e Bolle (1997),<br />
Chan, Moon e Cheng (2004), Jiang e Yau (2000),<br />
Luo, tian e Wu (2000), Ravi, Raja e Venugopal<br />
(2009) e Moura (2006)).<br />
√( ) ( ) (1)<br />
Cada sub-grafo será representado pelo vetor (4),<br />
sendo n o número de vértices vizinhos conectados<br />
pela triangulação. O vetor característico da impressão<br />
digital é obtido agrupando-se os sub-grafos de acordo<br />
com (5).<br />
ISSN: 2175-8905 - Vol. X 991<br />
(2)<br />
(3)
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
Comparando a estrutura básica proposta (sub-grafo),<br />
com as estruturas locais construídas através da vizinhança<br />
simples, pode-se observar que, segundo este<br />
último modelo, para se decidir quais minúcias seriam<br />
consideradas como vizinhas haveria a necessidade de<br />
calcular as distâncias euclidianas entre todas as minúcias<br />
da impressão digital. No modelo proposto, a<br />
vizinhança é estabelecida exclusivamente pela triangulação.<br />
Ainda, comparando esses dois modelos, é<br />
possível, no caso da vizinhança local, não haver<br />
minúcia próxima o suficiente para que seja considerada<br />
vizinha, gerando um ponto isolado que não<br />
forma nenhuma estrutura. No modelo proposto, dada<br />
a característica da triangulação, não haverá minúcias<br />
com menos de duas vizinhas conectadas, afinal, todo<br />
vértice de um triângulo está conectado a outros dois.<br />
Comparando nosso modelo àqueles que utilizam<br />
estruturas globais, observa-se que no modelo proposto<br />
não é necessário encontrar o ponto de referência<br />
(geralmente o núcleo da impressão digital) que o<br />
modelo global exige.<br />
(a)<br />
(c)<br />
(b)<br />
(d)<br />
Figura 9 – (a) impressão digital com minúcias trianguladas<br />
(b) Grafo obtido com a triangulação. (c) e (d) subgrafos<br />
formados respectivamente pelos pontos 1 e 2<br />
destacados com círculo amarelo em (b).<br />
5 Comparando duas impressões digitais através<br />
de seus vetores característicos<br />
O grau de similaridade entre duas impressões digitais,<br />
para sistemas baseados em minúcias, é determinado<br />
pela quantidade de coincidências entre esses<br />
pontos. Em nossa proposta, a quantidade de pontos<br />
coincidentes será determinada pela quantidade de<br />
pares de sub-grafos corretamente associados. Seguindo<br />
a mesma linha de ação proposta em Jea e<br />
Govindaraju (2005), Jiang e Yau (2000), Mital e<br />
Teoh (1997) e Ratha et. al. (2000) nossa metodologia<br />
realiza o processo de comparação em duas etapas.<br />
Inicialmente, pares de sub-grafos são formados através<br />
de uma probabilidade de associação. Essa probabilidade<br />
é baseada na quantidade de vértices vizinhos,<br />
ou triplas [x, y, φ], correspondentes e o total de<br />
vértices do par de sub-grafos. No segundo estágio,<br />
são verificados se essas associações representam<br />
pontos realmente coincidentes através de simples<br />
sobreposição.<br />
ISSN: 2175-8905 - Vol. X 992<br />
[<br />
[<br />
φ<br />
φ<br />
φ<br />
φ ]<br />
(4)<br />
] (5)<br />
Formalmente, dois vértices, representados por duas<br />
triplas m e n, pertencentes a sub-grafos distintos, são<br />
considerados correspondentes se satisfizerem a equação<br />
6:<br />
[<br />
] [<br />
] [<br />
(<br />
(<br />
)<br />
) ] (6)<br />
( )<br />
Onde Δd, Δ e Δφ são tolerâncias, funções do comprimento<br />
da aresta que liga a minúcia central e o<br />
vértice sob avaliação. A probabilidade de associação,<br />
ou grau de similaridade local S, entre dois subgrafos,<br />
pertencentes a impressões digitais distintas, é<br />
dada pela Equação 7.<br />
√<br />
(7)<br />
Onde #triplas_OK indica a quantidade de triplas que<br />
satisfizeram a Equação 6, e #triplas_sub_i a quantidade<br />
total de triplas dos dois sub-grafos sob teste.<br />
Todo sub-grafo da primeira impressão digital do par<br />
sob teste é associado a um sub-grafo da segunda<br />
impressão com melhor probabilidade de associação<br />
S, S > th, sendo th um limiar. Depois de formados os<br />
pares, o segundo estágio verifica se há correspondência<br />
espacial entre suas minúcias centrais, através de<br />
sobreposição de pontos. Se a distância entre os pares<br />
sobrepostos for menor que uma tolerância Δd2, a<br />
correspondência é confirmada. O grau de similaridade<br />
final (Sf) entre dois vetores característicos, o que<br />
equivale à similaridade final entre duas impressões<br />
digitais, é dada pela equação 8.<br />
√<br />
(8)<br />
Sendo #sub-grafos_OK o número de sub-grafos com<br />
correspondência confirmada, N1 e N2 o número total<br />
de minúcias detectadas nas duas impressões digitais<br />
sob avaliação.<br />
6 Validando as metodologias propostas<br />
Para validar o método de extração e o modelo de<br />
vetor característico propostos foram utilizadas as<br />
bases de dados da FVC2002 (FVC, 2002), em um<br />
total de quatro e disponibilizadas em Maltoni et. al.<br />
(2005). Essas bases são denominadas de DB1, DB2,<br />
DB3 e DB4.<br />
Para validar o método de extração, foram utilizadas
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
doze amostras de impressões digitais de boa qualidade<br />
da base de dados DB1. As minúcias extraídas por<br />
esse método e por Palmer et. al. (2008) foram comparadas<br />
em termos de quantidade, detecção de falsas<br />
minúcias, erros na determinação da direção e tempo<br />
de processamento. A contagem de falsas minúcias foi<br />
realizada através da inspeção visual dos pontos detectados.<br />
Foram também utilizados os mesmos estágios<br />
de pré-processamento e limpeza para as duas<br />
metodologias, sendo a direção das bifurcações detectadas<br />
através do método de Palmer et. al. (2008)<br />
determinada de acordo com a Figura 3(b), ou seja, a<br />
bissetriz do menor ângulo formado pelas linhas incidentes<br />
no ponto. O resultado geral pode ser visto na<br />
Tabela 1.<br />
O desempenho do vetor característico proposto foi<br />
comparado com os modelos de Mital e Teoh (1997),<br />
baseado em estruturas locais, e em Bebis, Deaconu e<br />
Georgiopoulos (1999), baseado em triangulação.<br />
Foram construídos três sistemas de verificação independentes,<br />
com arquitetura similar, utilizando os<br />
mesmos conjuntos de minúcias obtidos nos estágios<br />
de extração proposto e as mesmas técnicas de comparação<br />
e consolidação (dois estágios). Não foram<br />
utilizados os pontos singulares nem contagem de<br />
linhas entre minúcias.<br />
O resultado geral dos testes é relacionado na Tabela<br />
2, onde os valores de EER e AUC obtidos pelos três<br />
sistemas podem ser comparados para as quatro bases<br />
de dados que compõem a FVC2002. Durante os<br />
testes, foi computado também o tamanho médio do<br />
vetor característico, outro parâmetro que tem relação<br />
direta com a quantidade de memória necessária para<br />
armazenar o vetor e que afeta diretamente a complexidade<br />
computacional dos sistemas. As Figuras 10 e<br />
11 mostram os resultados dos testes para a base de<br />
dados DB1, através das curvas de erro FAR(t) e<br />
FRR(t), valores de EER (Equal Error Rate) e curvas<br />
ROC, de onde são extraídos os parâmetros AUC<br />
(Area Under Curve) dos três modelos de vetor característico.<br />
7 Discussões e conclusões<br />
O método de extração de características proposto<br />
apresentou melhor desempenho quando comparados<br />
o tempo de processamento e as taxas de erro de direções<br />
de bifurcações, com uma performance semelhante<br />
nos demais quesitos da Tabela 1. O melhor<br />
desempenho no tempo de processamento se deve,<br />
principalmente, pela não necessidade de se calcular<br />
ângulos, e escolher o menor deles, entre os cruzamentos<br />
de linhas na imagem esqueleto, os quais<br />
indicam a presença de bifurcações. A possibilidade<br />
do sistema não conseguir definir qual o menor ângulo<br />
nesses cruzamentos também aumenta a incidência<br />
de erros de detecção das direções. No método proposto<br />
essa verificação não é necessária, já que o<br />
sistema procura apenas por terminações e os cruzamentos<br />
de linhas são ignorados.<br />
Erro %<br />
Já o modelo de vetor característico apresentado representa<br />
com eficiência uma impressão digital, apresentando<br />
uma probabilidade de até 99,77 % (parâmetro<br />
AUC extraído da curva ROC para a base DB1) de<br />
classificar corretamente duas impressões digitais<br />
como genuínas ou como impostoras, contra 96,67 %<br />
e 98,94 % das outras metodologias, havendo em<br />
contrapartida um pequeno aumento dos custos relativos<br />
aos requisitos de memória (tamanho médio do<br />
vetor característico). Tal desempenho do classificador<br />
foi obtido graças à exploração da unicidade de<br />
malha e imunidade à ruídos do grafo gerado pela<br />
triangulação de Delaunay e às propriedades individualizadoras<br />
da estrutura local. A inserção de outros<br />
elementos no vetor característico, tais como pontos<br />
singulares e quantidade de linhas entre minúcias<br />
tornaria o desempenho dos três sistemas ainda melhor.<br />
Tabela 1 – Resultado geral dos testes de extração de<br />
características.<br />
ISSN: 2175-8905 - Vol. X 993<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
Método<br />
Qtd total<br />
de minúciasdetectadas<br />
Qtd total<br />
de terminações<br />
detectadas<br />
Qtd total<br />
de bifurcaçõesdetectadas<br />
Tempo<br />
médio de<br />
extração<br />
por ID<br />
1 408 127 281 12 (ms)<br />
2 423 127 296 71 (ms)<br />
Método<br />
Erro tipo 1<br />
(%)<br />
Erro tipo 2<br />
(%)<br />
Erro tipo 3<br />
(%)<br />
Erro tipo 4<br />
(%)<br />
1 0,00 0,00 0,00 0,70<br />
2 0,00 1,00 0,00 4,39<br />
Método 1: Método proposto. Método 2: Palmer et. al (2008).<br />
Erro tipo 1: Razão de falsas terminações. Erro tipo 2: Razão de<br />
falsas bifurcações. Erro tipo 3: Razão de erros de direção para<br />
terminações. Erro tipo 4: Razão de erros de direção para bifurcações.<br />
Tabela 2 – Resultado geral para os modelos de vetor.<br />
Base<br />
de dados<br />
Sistema<br />
EER AUC<br />
Tam.<br />
médio<br />
Unidade<br />
1 6,286 0,96677 4,9 100<br />
FRR e FAR para Estrutura Local<br />
DB1 2 0,892 FAR 0,99778 5,2 100<br />
3 FAR FRR<br />
90 2,893 0,98943 57,6<br />
FRR<br />
1 5,036 0,97209 4,8 90<br />
Triplas/estrutura local<br />
100<br />
Triplas/sub-grafo<br />
Triângulos FAR<br />
90<br />
FRR<br />
Triplas/estrutura local<br />
DB2 80 2 1,143 0,99742 5,3 Triplas/sub-grafo<br />
80<br />
3 2,231 0,99251 71,7 80 Triângulos<br />
70 1 15,89 0,90901 4,8 Triplas/estrutura 70 local<br />
DB3 2 7,786 0,96909 70 4,9 Triplas/sub-grafo<br />
60 3 9,571 0,9608 36,2 triângulos<br />
60<br />
1 15,79 0,90774<br />
60<br />
4,9 Triplas/estrutura local<br />
DB4 50 2<br />
3<br />
4,607 0,97712 5,2<br />
50<br />
5,821 0,97089 58,9<br />
Triplas/sub-grafo<br />
50<br />
triângulos<br />
Sistema 40 1: baseado em vizinhança local. Sistema 40 2: baseado no<br />
40<br />
modelo de vetor proposto. Sistema 3: baseado em triangulação.<br />
EER: 30 Equal Error Rate; AUC: Area Under Curve. 30<br />
Erro %<br />
%Erro<br />
20<br />
X: 0.05<br />
Y: 6.286 10<br />
FRR e FAR para Estrutura Local<br />
X: 0.05<br />
Y: 6.286<br />
%Erro<br />
10<br />
X: 0.12<br />
Y: 0.8929<br />
0<br />
0<br />
0<br />
0.2 0 0.4 0.2 0.6 0.4 0.80.6 1 0.8<br />
0<br />
1 0 0.2<br />
0<br />
0 0.4 0.2 0.6 0.40.8 0.61 0.8<br />
0<br />
0 1<br />
Limiar Limiar<br />
Limiar<br />
t Limiar<br />
Limiar t<br />
(a) (b)<br />
Erro %<br />
30<br />
20<br />
10<br />
Erro %<br />
20<br />
FRR e FAR para o Método Proposto<br />
FRR e FAR para o Método Proposto<br />
FAR<br />
FRR<br />
X: 0.12<br />
Y: 0.8929<br />
Erro %<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
F<br />
X<br />
Y
0.6 0.8 1<br />
miar<br />
Erro %<br />
%Erro<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
0<br />
0 0.2 0.4 0.6 0.8 1<br />
Limiar t<br />
(c)<br />
Figura 10 – Detalhes das curvas de erro e o valor de<br />
EER (FAR(t) = FRR(t)). (a) Estrutura Local. (b) Método<br />
proposto. (c) Triangulação.<br />
CAR = 1 - FRR = sensibilidade<br />
1<br />
0.98<br />
0.96<br />
0.94<br />
0.92<br />
0.9<br />
0.88<br />
X: 0.11<br />
Y: 2.893<br />
Limiar<br />
Curvas ROC<br />
AUC 1 = 0.96677<br />
AUC 2 = 0.99778<br />
AUC 3 = 0.98943<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
FAR = 1 - especificidade<br />
Figura 11 – Curvas ROC e o valor de AUC.<br />
Referências Bibliográficas<br />
1 - Estrutura Local<br />
2 - Método Proposto<br />
3 - Triangulação<br />
Bebis, Deaconu e Georgiopoulos (1999). Bebis,<br />
George, Deaconu, Taisa. e Georgiopoulos, Michael.,<br />
“Fingerprint Identification Using Delaunay<br />
Triangulation”, IEEE Internation Conference on Information<br />
Intelligence and Systems, pp 452-459,<br />
1999.<br />
Berg, Cheong e Kreveld (2008). Berg, Mark de;<br />
Cheong, Otfried; Kreveld, Marc van; “Computational<br />
Geometry: Algorithms and Applications”,<br />
Third Edition (March 2008), Springer-Verlag,<br />
2008. 386 pages, ISBN: 978-3-540-77973-5<br />
Castro (2008). Castro, Tiago da Silva. “Identificação<br />
de Impressões Digitais Baseada na Extração de<br />
Minúcias”; [Juiz de Fora] 2008-08-25, XIX, 99 p.<br />
29,7cm (UFJF, Mestrado em Engenharia Elétrica)<br />
Dissertação - Universidade Federal de Juiz de Fora,<br />
2008.<br />
Chan, Moon e Cheng (2004). K. C. Chan, Y. S. Moon,<br />
P.S. Cheng, "Fast Fingerprint Verification using<br />
Sub-regions of Fingerprint Images", IEEE Transactions<br />
on Circuits and Systems for Video Technology,<br />
Vol. 14, Issue 1, pp. 95-101, Jan. 2004.<br />
Chen e Chiu (2006). Ching-Han Chen; Kuo-En Chiu; ,<br />
"1-D Gabor Directional Filtering for Low-Quality<br />
Fingerprint Image Enhancement," IEEE Industrial<br />
Electronics, IECON 2006 - 32nd Annual Conference<br />
on , vol., no., pp.3466-3470, 6-10 Nov. 2006.<br />
<strong>Costa</strong> (2001). COSTA, S. M. F., "Classificação e Verificação<br />
de Impressões Digitais", Dissertação de<br />
Mestrado, Escola Politécnica da Universidade de<br />
São Paulo, 2001.<br />
FVC (2002). Second International Competition for<br />
Fingerprint Verification Algorithms (FVC2002),<br />
disponível no site http://bias.csr.unibo.it/fvc2002/.<br />
Huvanandana, Kin e Hwang (2000). Huvanandana S.;<br />
Kim C.; Hwuang, J. N., “Reliable and Fast Finger-<br />
print Identification for Security Applications”,<br />
ICIP00, Vol II, pp 503-506, 2000.<br />
Jea e Govindaraju (2005). T. Y. JEA, V. GO-<br />
VINDARAJU, "A Minutia-based partial fingerprint<br />
recognition system", Pattern Recognition 38 (2005)<br />
pp. 1672-1684, March 2005, published by Elsevier<br />
Ltd.<br />
Jiang and Yau (2000). Jiang X. e Yau W. Y., “Fingerprint<br />
Minutiae Matching Based on the Local and<br />
Global Structures”, in Proc. Int. Conf. on Pattern<br />
Recognition (15 th ), Vol 2, pp. 1042-1045, 2000.<br />
Liang, Bishnu e Asano (2007). Xuefeng Liang, Arijit<br />
Bishnu e Tetsuo Asano, "A Robust Fingerprint Indexing<br />
Scheme Using Minutia Neighborhood<br />
Structure and Low-Order Delaunay Triangles",<br />
IEEE Trans. on Informatin Forensics and Security,<br />
Vol 2, nº 4, pp 721-733, December 2007.<br />
Liu, Yin e Zhang (2005). Ning Liu, Yilong Yin e<br />
Hongwei Zhang, "A Fingerprint Matching Algorithm<br />
Based On Delaunay Triangulation Net", The<br />
Fifth International Conference on Computer and<br />
Information Technology, (CTI'05), 2005.<br />
Luo, Tian e Wu (2000). Xiping Luo, Jie Tian, Yan Wu,<br />
"A Minutia Matching Algorithm in Fingerprint<br />
Verification", 15th International Conference on<br />
Pattern Recognition (ICPR'00) - Volume 4, 2000,<br />
p. 4833.<br />
Maltoni et al (2005). D. Maltoni, D. Maio, A.K. Jain,<br />
and S. Prabhakar, "Handbook of Fingerprint<br />
Recognition", Springer 2005.<br />
Mital e Teoh (1997). Dinesh P. Mital e Eam Khwang<br />
Teh, “An Automated Matching Technique for Fingerprint<br />
Identification”, 1th International Conference<br />
on Knowledge-Based Inteligent Electronic<br />
Systems, 21-23 May, 1997, Adelaide, Austrália, pp<br />
142-147, 1997.<br />
Moura (2006). Moura, André Luis; “Uma proposta<br />
para triangulação Delaunay 2D e Localização Planar<br />
de Pontos em Ocaml”, Tese de Doutorado,<br />
Universidade Federal de Uberlândia, Uberlândia/MG,<br />
114 p, 2006.<br />
Palmer et al (2008). L. R. Palmer, M. S. Al-Tarawneg,<br />
S. S. Dlay e W. L. Woo, “Efficient Fingerprint<br />
Feature Extraction: Algorithm and Perfomance<br />
Evaluation”, 6th International Symposium on, pp<br />
581-584, Issue Date: 25-25 July 2008.<br />
Ratha et al (2000). Ratha N. K., Pandit, V. D. Bolle, R.<br />
M. e Vaish, V., “Robust Fingerprint Authentication<br />
Using Local Structural Similarity”, in Proc. Workshop<br />
on applications of Computer Vision, pp. 29-<br />
34, 2000.<br />
Ravi, Raja e Venugopal (2009). J. Ravi, K. B. Raja, K.<br />
R. Venugopal, "Fingerprint Recognition Using Minutia<br />
Score Matching", International Journal of<br />
Engineering and Technology, Vol. 1(2), 2009, pp<br />
35-42.<br />
Sipser (2006). Sipser, M., Introduction to the Theory of<br />
Computation, Thomson, NY, 2006.<br />
Stoney (1985). D.A. Stoney, “A Quantitative Assessment<br />
of Fingerprint Individuality”, Ph, D. Thesis,<br />
Univ. California, 1985.<br />
Zang et al (2008). Zang, J., Yuan, J. Shi, F. e Du, S.D,<br />
“A Fingerprint Matching Algorithm of Minutia<br />
Based on Local Characteristic”, Fourth International<br />
Conference on Natural Computation – Vol. 04<br />
pp 13-17, 2008.<br />
ISSN: 2175-8905 - Vol. X 994