DESENVOLVIMENTO DE UMA REDE MODBUS PARA O ... - Fei
DESENVOLVIMENTO DE UMA REDE MODBUS PARA O ... - Fei
DESENVOLVIMENTO DE UMA REDE MODBUS PARA O ... - Fei

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Tensão Normalizada(V)<br />
1.2<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
X SBAI – Simpósio Brasileiro de Automação Inteligente<br />
18 a 21 de setembro de 2011<br />
São João del-Rei - MG - Brasil<br />
Solicitação do Mestre<br />
Resposta do Escravo<br />
0<br />
0 0.005 0.01 0.015<br />
Tempo(s)<br />
Figura 6: Sequência de Mensagens da Comunicação<br />
Modbus.<br />
5 Utilização da Rede em um Veículo<br />
Autônomo<br />
O CADU (Carro Autônomo Da UFMG) é um veículo<br />
Chevrolet Astra 2003/2004 equipado com sistema<br />
de direção hidráulica, marcha automática,<br />
acelerador eletrônico e freios ABS controlados por<br />
Unidades de Controle Eletrônica (ECU - Electronic<br />
Control Units) e interconectadas por um barramento<br />
CAN (Santos et al., 2008).<br />
Os sistemas atualmente presentes no carro<br />
para controle da velocidade (Freitas et al., 2009)<br />
utilizam-se de comunicação USB e são: Acelerador,<br />
Freio e Sensor de Velocidade das rodas. Estes<br />
sistemas se comunicam com computador rodando<br />
Windows Vista, que também executa o controlador<br />
de velocidade. Neste trabalho, para avaliação<br />
experimental da rede desenvolvida, este sistema<br />
foi substituído por uma rede com um nó mestre<br />
e três nós correspondentes aos sistemas de Acelerador,<br />
Freio e Sensor de Velocidade. De fato,<br />
os subsistemas atualmente instalados no veículo<br />
foram adaptados para que a sua comunicação anteriormente<br />
feita por USB fosse substituída pela<br />
rede Modbus. A adaptação envolveu o uso de novos<br />
conectores e cabos sem contudo ser necessário<br />
a troca do hardware de interface com o veículo.<br />
Um quarto nó foi inserido na rede de modo a permitirumamudançadinâmicadosetpoint<br />
pormeio<br />
de acionamento de botões. Esta abordagem é interessante<br />
pois mostra a capacidade do Mestre de<br />
receber informações ou comandos de outros nós<br />
com a uma latência máxima igual a um período<br />
de amostragem.<br />
Em (Freitas, 2010) foi mostrado que a dinâmica<br />
de aceleração do CADU possui uma constante<br />
de tempo τ próxima de três segundos. As<br />
dinâmicas envolvidasno freioeno aceleradortambém<br />
são lentas o suficiente para que os atrasos<br />
máximos da rede se tornem desprezíveis para os<br />
comandos responsáveis pelo atuador de freios e o<br />
atuador de aceleração. Deste modo, a taxa de<br />
amostragem escolhida de 50Hz para o sensor de<br />
velocidade e os demais nós escravos satisfaz as necessidades<br />
do controlador.<br />
O programa rodando no mestre consistiu em:<br />
(i)obterpormeiodemensagensavelocidadeatual<br />
do veículo medida pelo nó Sensor de Velocidade<br />
das Rodas; (ii) obter o valor da referência fornecido<br />
pelo nó de Setpoint; (iii) Fazer o processamento<br />
com base em um algoritmo de controle<br />
Fuzzy; (iv) enviar a mensagem de atuação para<br />
o nó Freio e (v) enviar a mensagem de atuação<br />
para o nó Acelerador. Com base nesta sequência,<br />
escolheu-se período da tarefa de tempo real igual<br />
20ms no qual serão executados os passos de (i) a<br />
(v), cumprindo-se assim a taxa de amostragem de<br />
50Hz para cada um dos nós presentes na rede.<br />
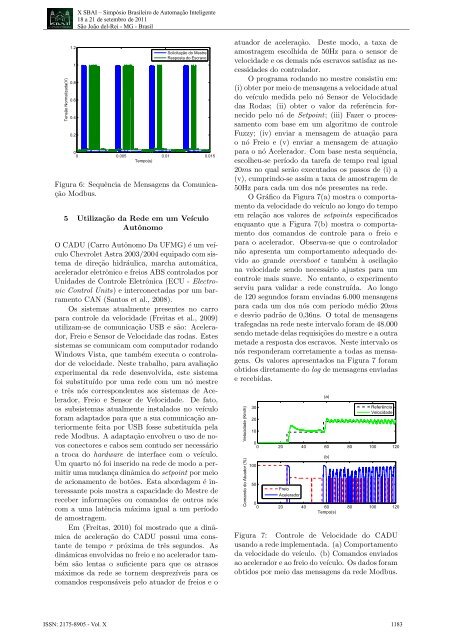
O Gráfico da Figura 7(a) mostra o comportamento<br />
da velocidade do veículo ao longo do tempo<br />
em relação aos valores de setpoints especificados<br />
enquanto que a Figura 7(b) mostra o comportamento<br />
dos comandos de controle para o freio e<br />
para o acelerador. Observa-se que o controlador<br />
não apresenta um comportamento adequado devido<br />
ao grande overshoot e também à oscilação<br />
na velocidade sendo necessário ajustes para um<br />
controle mais suave. No entanto, o experimento<br />
serviu para validar a rede construída. Ao longo<br />
de 120 segundos foram enviadas 6.000 mensagens<br />
para cada um dos nós com período médio 20ms<br />
e desvio padrão de 0,36ns. O total de mensagens<br />
trafegadas na rede neste intervalo foram de 48.000<br />
sendometadedelasrequisiçõesdomestreeaoutra<br />
metade a resposta dos escravos. Neste intervalo os<br />
nós responderam corretamente a todas as mensagens.<br />
Os valores apresentados na Figura 7 foram<br />
obtidos diretamente do log de mensagens enviadas<br />
e recebidas.<br />
0<br />
0 20 40 60 80 100 120<br />
ISSN: 2175-8905 - Vol. X 1183<br />
Velocidade (Km/h)<br />
Comando do Atuador (%)<br />
30<br />
20<br />
10<br />
100<br />
50<br />
Freio<br />
Acelerador<br />
(a)<br />
(b)<br />
Referência<br />
Velocidade<br />
0<br />
0 20 40 60<br />
Tempo(s)<br />
80 100 120<br />
Figura 7: Controle de Velocidade do CADU<br />
usandoaredeimplementada. (a)Comportamento<br />
da velocidade do veículo. (b) Comandos enviados<br />
aoaceleradoreaofreiodoveículo. Osdadosforam<br />
obtidos por meio das mensagens da rede Modbus.