CAPÍTULO I
CAPÍTULO I
CAPÍTULO I

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
REVISÃO DE MECÂNICA GERAL<br />
CONCEITOS BÁSICOS<br />
I . FORÇA<br />
A. Conceito:<br />
<strong>CAPÍTULO</strong> I<br />
Força é toda a grandeza capaz de provocar movimento, alterar o estado de movimento ou provocar<br />
deformação em um corpo. É uma grandeza vetorial cuja intensidade pode ser obtida pela expressão da<br />
física:<br />
F = m . a<br />
onde:<br />
F = força<br />
m = massa do corpo<br />
a = aceleração provocada<br />
Sendo força um elemento vetorial se caracteriza por:<br />
direção<br />
sentido<br />
módulo ou intensidade<br />
ponto de aplicação<br />
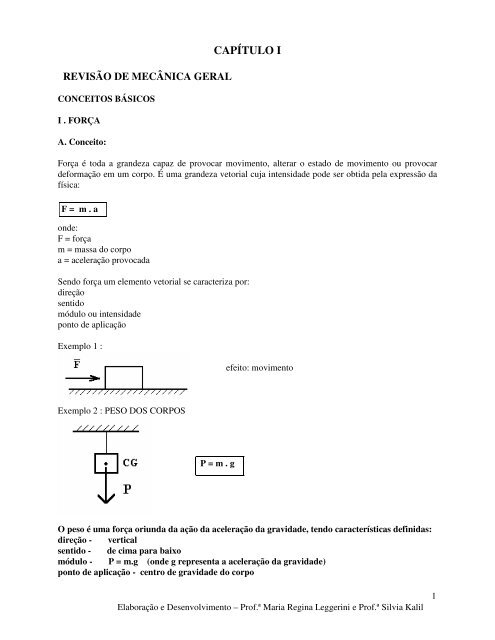
Exemplo 1 :<br />
Exemplo 2 : PESO DOS CORPOS<br />
P = m . g<br />
efeito: movimento<br />
O peso é uma força oriunda da ação da aceleração da gravidade, tendo características definidas:<br />
direção - vertical<br />
sentido - de cima para baixo<br />
módulo - P = m.g (onde g representa a aceleração da gravidade)<br />
ponto de aplicação - centro de gravidade do corpo<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
1
Na maioria das estruturas serão com cargas peso que trabalharemos.<br />
B. UNIDADES<br />
N - Newton kN - kiloNewton kgf - kilograma força<br />
1 kgf = 10 N 1 kN = 10 3 N 1 kN = 10 2 kgf<br />
1 kN = 103 N = 102 kgf<br />
C. PRINCÍPIO DA AÇÃO E REAÇÃO<br />
A toda a ação corresponde uma reação igual e contrária (3ª lei de Newton).<br />
Podemos observar que estas duas forças tem pontos de aplicação diferentes e portanto causam efeitos<br />
diferentes, cada uma atuando no seu ponto de aplicação.<br />
D. CLASSIFICAÇÃO DAS FORÇAS<br />
As forças são classificadas em forças de contato (ex: locomotivas, musculares, etc..) e de ação à<br />
distância (ex: elétricas, gravitacionais, magnéticas, etc...)<br />
Em análise estrutural as forças são divididas conforme esquema abaixo:<br />
FORÇAS EXTERNAS: atuam externamente em uma estrutura e podem ser:<br />
ações : São forças independentes que podem atuar em qualquer ponto de uma estrutura . Correspondem<br />
às cargas as quais estaremos submetendo a estrutura, normalmente conhecidas ou avaliadas. Ex: peso<br />
do pedestre em uma passarela, peso próprio das estruturas, etc...<br />
reações : São forças que surgem em determinados pontos de uma estrutura (vínculos ou apoios), sendo<br />
consequência das ações portanto não são independentes, devendo ser calculadas para se equivalerem as<br />
ações.<br />
FORÇAS INTERNAS : são aquelas que mantém unidos os pontos materiais que formam o corpo<br />
rígido (solicitações internas). Se o corpo rígido é estruturalmente composto de diversas partes, as forças<br />
que mantém estas partes unidas também são chamadas de forças internas (forças desenvolvidas em<br />
rótulas).<br />
E. DECOMPOSIÇÃO DE FORÇAS<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
2
Qualquer força no espaço pode ser decomposta segundo três direções . Normalmente usamos como<br />
referência três direções ortogonais entre si, escolhidas de acordo com o problema.<br />
Qualquer força em um plano pode ser decomposta segundo duas direções. Normalmente nos interessam<br />
duas direções perpendiculares entre si,também escolhidas de acordo com o problema.<br />
Vamos nos ater ao caso plano que é o mais usual<br />
Exemplo:<br />
por trigonometria<br />
Fx = F . cos Fy = F . sen Fy/Fx = tg<br />
F - força a ser decomposta<br />
x,y - direções ortogonais escolhidas como referência<br />
- ângulo formado por F em relação a x<br />
Fx,Fy- componentes da força nas direções x e y<br />
A força F decomposta também pode ser chamada de resultante da soma vetorial de suas componentes<br />
Fx e Fy . Observe que soma vetorial ou geométrica não correspode a soma algébrica.<br />
II . MOMENTO DE UMA FORÇA<br />
A. DEFINIÇÕES:<br />
1.MOMENTO POLAR (momento de uma força em relação à um ponto)<br />
DEFINIÇÃO : Chama-se momento de uma força F em relação à um ponto "0", o produto vetorial do<br />
vetor OA pela força F ,sendo "A" um ponto qualquer situado sobre a reta suporte da força F. Logo<br />
também é um vetor, e para a sua caracterização precisamos determinar o seu módulo,direção e sentido.<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
3
Mo = F ∧ OA<br />
O efeito do vetor momento é o de provocar um giro com determinado sentido em relação ao ponto<br />
considerado. O vetor momento apresenta as seguintes características:<br />
direção : perpendicular ao plano formado pela força e pelo vetor OA<br />
sentido : regra da mão direita<br />
módulo: produto do módulo da força F pela menor distancia do ponto "0" a reta suporte da força.<br />
ponto de aplicação : ponto "O" em relação ao qual se calculou o momento.<br />
Mo = F . OA .senα ou Mo = F . d<br />
Regra da mão direita:<br />
OBS 1 : posiciona-se os dedos da mão direita no sentido da rotação da força em torno do ponto O e o<br />
polegar indica o sentido do momento.<br />
OBS 2:. a distância d que representa o módulo do vetor OA é também chamada de braço de alavanca.<br />
Ela é a menor distância entre a reta suporte da força e o ponto em relação ao qual se calcula o<br />
momento , isto é, pode ser obtida pela perpendicular à reta que passa pelo ponto.<br />
OBS 3 : Podemos representar o sentido do momento no plano usando convenções simples<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
4
Podemos também convencionar sinais + ou - para cada um dos sentidos, de acordo com a nossa<br />
escolha.<br />
Exemplo 1 : Determine o peso que devemos colocar na extremidade direita da gangorra a fim de que<br />
ela permaneça em equilíbrio estático.<br />
P1 = 30 kN<br />
a = 2 m<br />
b = 4 m<br />
P = ?<br />
Exemplo 2 : Determine a força desenvolvida no tirante da estrutura, a fim de que ela permaneça em<br />
equilíbrio, sabendo-se que a barra pesa 5 kN. A barra é presa a uma parede por meio de um pino O.<br />
G = 10 kN<br />
L = 3 m<br />
= 15º<br />
T = ?<br />
B. MOMENTO AXIAL ( momento de uma força em relação a um eixo)<br />
DEFINIÇÃO:<br />
- É o valor algébrico da projeção ortogonal sobre o eixo do momento polar produzido pela força em<br />
relação a um ponto qualquer do eixo. Pode ser representado por uma grandeza escalar quando se adota<br />
uma convenção para a orientação do eixo.<br />
- É o momento polar produzido pela projeção ortogonal da força sobre uma reta perpendicular ao plano<br />
do eixo, em relação a este eixo<br />
Exemplo 1: Força perpendicular ao plano do eixo<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
5
Exemplo 2 : Força inclinada em relação ao plano do eixo<br />
Exemplo 3 : Força no espaço (direção qualquer)<br />
OBSERVAÇÃO:<br />
M x = F . d<br />
Mx = Fz . d<br />
F z = F . sen<br />
F = F 1 + F 2 + F 3<br />
Mx = 0<br />
F 1 My =.0<br />
Mz = -4 . F 1<br />
M x = 0<br />
F 2 M y = 0<br />
M z = - 1 . F 2<br />
M x = + 4 . F 3<br />
F 3 M y = - 1 . F 3<br />
Mz = 0<br />
O momento de uma força em relação à um eixo é nulo sempre que a força e o eixo forem coplanares<br />
(concorrentes ou paralelos).<br />
C. UNIDADE DE MOMENTO<br />
Sendo o momento produto de uma força por uma distancia,a unidade desta grandeza é o produto de<br />
uma unidade de força por uma unidade de distancia.<br />
Exemplos: kgf.m , kN.m , N.m , kN.cm , etc<br />
6<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil
III . SISTEMA DE FORÇAS<br />
A. DEFINIÇÃO :<br />
É o conjunto de forças que atuam simultaneamente em um corpo rígido ou em um ponto material.<br />
B. PRINCÍPIO DA TRANSMISSIBILIDADE OU FORÇAS EQUIVALENTES:<br />
Este princípio estabelece que as condições de equilíbrio ou de movimento de um corpo rígido<br />
permanecem inalteradas se uma força F, que atua em um dado ponto do corpo rígido é substituida por<br />
uma força F' de mesmo módulo, direção e sentido, mas que atua em um ponto diferente, desde que as<br />
duas tenham a mesma linha de ação (mesma reta suporte). As forças citadas tem o mesmo efeito sobre<br />
o corpo e são chamadas de equivalentes.<br />
Exemplo:<br />
C. RESULTANTE DE VÁRIAS FORÇAS CONCORRENTES:<br />
A resultante de várias forças que concorrem em um ponto é a soma geométrica à partir<br />
do ponto de forças equipolentes as que constituem o sistema, formando um polígono.<br />
Obs: Forças equipolentes são aquelas que tem mesmo módulo, mesma direção e mesmo sentido.<br />
RESULTANTE:<br />
Origem no ponto escolhido como referência e extremidade com a última força.<br />
Lembrando que uma força pode ser decomposta segundo eixos de referência, podemos determinar a<br />
resultante de uma forma mais simples,obtendo-se cada componente pela soma algébrica das projeções<br />
de todas as forças sobre este eixo.<br />
Exemplo 1: Soma geométrica<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
7
Exemplo 2 :<br />
R = 0<br />
R ≠ 0<br />
OBSERVAÇÃO: Se o polígono formado pelas forças for fechado a resultante é nula.<br />
Exemplo 3 : Forças concorrentes em um ponto de um plano<br />
A resultante de forças concorrentes em um ponto de um plano pode ser calculada atravéz da<br />
decomposição destas forças em relação à duas direções ortogonais escolhidas.<br />
R = Σ( F ) + Σ(<br />
F )<br />
2 2<br />
x y<br />
PITÁGORAS<br />
IV . PRINCÍPIO DA SUPERPOSIÇÃO DE EFEITOS<br />
F 1x = F 1 . cos<br />
F 1y = F 1 . sen<br />
F2x = F2 . cos β<br />
F 2y = F 2 . sen β<br />
Fx = F1x + F2x<br />
Fy = F1y + F2y<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
8
" O efeito produzido por um conjunto de forças atuando simultaneamente em um corpo é igual a<br />
soma do efeito produzido por cada uma das forças atuando isolada"<br />
A partir deste princípio podemos dizer que:<br />
- O momento polar resultante de um sistema de forças é a soma algébrica dos momentos polares,<br />
produzidos em relação ao mesmo ponto, por cada uma das forças atuando isolada.<br />
- O momento axial produzido por um sistema de forças atuando simultaneamente em um corpo é igual<br />
a soma algébrica dos momentos axiais,produzidos em relação ao mesmo eixo, de cada uma das forças<br />
atuando isolada.<br />
V. BINÁRIO OU PAR DE FORÇAS<br />
A. CONCEITO<br />
Denomina-se binário a um sistema constituido por um par de forças paralelas de módulos iguais e<br />
sentidos opostos. A resultante em termo de forças é nula, entretanto há um momento polar resultante de<br />
módulo igual ao produto da força pela distância entre as duas direções paralelas.<br />
Exemplo 1:<br />
F =<br />
a =<br />
b =<br />
c =<br />
d =<br />
MA =<br />
MD =<br />
M E =<br />
CONCLUSÃO: O binário é um vetor livre pois seu efeito independe do ponto de aplicação, sendo<br />
que para qualquer ponto do plano o binário tem o mesmo valor.<br />
B . SITUAÇÕES REPRESENTATIVAS<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
9
C. EQUIVALENCIA DE BINÁRIOS<br />
Dois binários são equivalentes quando tem o mesmo momento polar resultante<br />
Exemplo 1: convenção (sentido antihorário positivo)<br />
Superposição de efeitos:<br />
M 1 = 60 kN . 2m = 120 kN.m<br />
M 2 = 30 kN . 4m = 120 kN.m<br />
Se quizermos o efeito de dois binários atuando simultaneamente:<br />
M = M 1 + M 2 = 240 kN.m<br />
M A =<br />
M B =<br />
Obs: Veja que podemos transformar a soma vetorial de binários em uma soma algébrica a partir da<br />
adoção de uma convenção.<br />
Exemplo2: (adote convenção anterior)<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
10
Supomos<br />
M1 = - 60 kN . 2m = - 120 kN.m<br />
M2 = + 30 kN . 4m = + 120 kN.m<br />
M = M1 + M2 = 0<br />
CONCLUSÃO : Os dois binários não são equivalentes pois tem sentidos contrários . Observe-se<br />
que em qualquer ponto do plano a superposição dos binários deve ser nula.<br />
MA = 0 MB = 0<br />
VI . TRANSLAÇÃO DE FORÇAS<br />
Transladar uma força (como artifício de cálculo) é transportá-la de sua direção para outra direção<br />
paralela. Isto implica no acréscimo de um momento devido à translação, cujo módulo é igual ao<br />
produto da força pela distância de translação.<br />
VII . REDUÇÃO DE UM SISTEMA DE FORÇAS À UM PONTO<br />
Qualquer sistema de forças pode ser reduzido à um sistema vetor-par , onde o vetor é a resultante das<br />
forças , localizada à partir de um ponto arbitrariamente escolhido e o par é o momento polar resultante<br />
do sistema em relação ao mesmo ponto.<br />
Exemplo 1: Reduzir o sistema de forças da figura ao ponto B indicado.<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
11
Exemplo 2 : Reduzir o sistema acima ao ponto A.<br />
R:<br />
VII . EQUIVALÊNCIA DE UM SISTEMA DE FORÇAS<br />
Dois sistemas de forças são equivalentes quando tem resultantes iguais e momentos polares em relação<br />
ao mesmo ponto também iguais.<br />
Exemplo:<br />
F - sistema inicial<br />
F x , F y - sistema equivalente<br />
M A (sistema inicial) =<br />
M A (sistema equivalente) =<br />
F =<br />
F x =<br />
F y =<br />
OBS: O uso de sistemas equivalentes é um artifício de cálculo muito útil<br />
a =<br />
b =<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
α =<br />
12
VIII . EQUILÍBRIO ESTÁTICO DOS CORPOS RÍGIDOS<br />
Existem diversas possibilidades de movimento em um corpo livre no espaço.<br />
Se tomarmos 3 eixos ortogonais como referencia de espaço, e isto se faz necessário por uma questão de<br />
classificação e organização de método, podemos dizer que um corpo no espaço tem 6 possibilidades de<br />
movimento:<br />
- translação segundo as tres direções de referência<br />
- rotação em torno das tres direcões de referência<br />
Dizemos que um corpo está em equilíbrio estático quando as forças atuantes formam entre si um<br />
sistema equivalente a zero, isto é, sua resultante e o seu momento polar em relação a qualquer ponto é<br />
nulo.<br />
R = 0 M p = 0<br />
Como costuma-se traballhar com as forças e momentos referenciadas a um sistema tri-ortogonal de<br />
eixos, desta maneira o equilíbrio se verifica se as 6 equações abaixo são satisfeitas:<br />
Fx = 0 M x = 0<br />
Fy = 0 My = 0<br />
Fz = 0 Mz = 0<br />
EQUAÇÕES FUNDAMENTAIS DA ESTÁTICA<br />
___________________________________________________________________________________<br />
EXERCÍCIOS:<br />
1. Suponha um plano formado pelos eixos x e y, conforme desenho, onde atuam as cargas F 1 e F 2 .<br />
Calcule:<br />
a. Momentos desenvolvidos por F 1 em relação aos pontos A , B e C.<br />
b. Momentos desenvolvidos por F 2 em relação aos pontos A , B e C.<br />
c. Momentoda resultante do sistema em relação aos pontos A , B e C .<br />
d. Resultante do sistema na direção x<br />
e. Resultante do sistema na dieção y<br />
Convencione o giro no sentido horário positivo.<br />
F1 = 20 kN<br />
F2 = 30 kN<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
13
R: a) M 1A = 0 M 1B = 69,28 kN.m M 1C = 109,28 kN.m<br />
b) M2A = 120 kN.m M2B= 120 kN.m M2C = 0<br />
c) MA = 120 kN.m MB = 189,28 kN.m MC = 109,28 kN.m<br />
d) Fx = + 17,32 kN e) Fy = - 20 kN<br />
2. Suponha no espaço as forças F1 e F2. Calcule:<br />
a. Momentos da força F1 em relação aos eixos x,y,e,z,.<br />
b. Momento da força F2 em relação aos eixos x,y e z .<br />
c. Momento da resultante em relação aos eixos x , y, e z .<br />
F1 = 10 kN<br />
F2 = 15 kN<br />
R: a) Mx1 = 0 My1 = 0 Mz1 = 20 kN.m<br />
b) Mx2 = 31,5 kN.m My2 = 31,5 kN.m Mz2 = 21 kN.m<br />
3. Suponha as forças indicadas no desenho atuando perpendicularmente ao eixo x.O sistema 1<br />
representa<br />
um binário e o sistema 2 representa outro. Convencione anti horário positivo.<br />
a. Quanto vale o binário 1<br />
b. Quanto vale o binário 2<br />
c. São equivalentes? Porque?<br />
d. Quanto vale o momento polar do sistema 1 em relação aos pontos A , C e E.<br />
e. uanto vale o momento polar do sistema 2 em relação aos pontos B , D e E.<br />
f. Quanto vale o momento polar resultante destes dois sistemas em relação aos pontos A,B,C D e E.<br />
R: a) + 20 kn.m<br />
b) + 20 kN.m<br />
c)sim<br />
d) M1A = M1B=M1E = + 20 kN.m<br />
e) M2B=M2D=M2E = + 20 kN.m<br />
f) MA = MB = .....=ME = + 40 kN.m<br />
4. Suponha forças como as do exercício 3 perpendiculares ao eixo formando 2 binários. Responda as<br />
perguntas do exercício 3 usando a mesma convenção.<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
14
R: a)- 60 kN.m b) + 60 kN.m<br />
c) não<br />
d) M1A=M1C=M1E = - 60 kN.m<br />
e) M2B=M2D=M2E = + 60 kN.m<br />
f) MA =MB = .....= ME = 0<br />
5. Suponha as hastes do desenho em um plano e as cargas perpendculares à este plano.<br />
a. Translade a força de 10 kN para os pontos C ,B A.<br />
R: ponto C ponto B ponto A<br />
F y = 10 kN F y = 10 kN F y = 10 kN<br />
M z = 20 kN.m M z = 20 kN.m M z = 50 kN.m<br />
Mx = 20 kN.m Mx = 20 kN.m<br />
b. Translade as forças indicadas para os pontos B e D.<br />
R: ponto B : Fy = 20 kN<br />
Mz = - 20 kN.m<br />
ponto D : Fy = 20 kN<br />
Mz = - 20 kN.m<br />
Mx = + 80 kN.m<br />
6. Qual a força horizontal que atua nos parafusos 1 e 2 da ligação abaixo, considerando o momento<br />
provocado pelo peso na ponta da haste<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
15
R : P1 = 100 kgf P2 = 100 kgf<br />
7. Suponha as estruturas planas representadas abaixo. Determine,se necessário usando sistemas<br />
equivalentes Σ Fx ,ΣFy, ΣMA, ΣMB e ΣMC<br />
a.<br />
b.<br />
R: ΣFx = 25,98 kN ΣFy = 65 kN<br />
ΣMA = 138,04 kN.m<br />
ΣMB = 70 kN.m<br />
ΣMC = 330 kN.m<br />
R: ΣFx =16,64 kN ΣFy = -4,96kN<br />
ΣMA = -36 kN.m<br />
ΣMB = -84 kN.m<br />
ΣMC = -98,96 kN.m<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
16
8. Reduzir no ponto A o sistema de forças da figura:<br />
Elaboração e Desenvolvimento – Prof.ª Maria Regina Leggerini e Prof.ª Silvia Kalil<br />
17