

Automação de Sistemas

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Outra tecnologia crucial para o <strong>de</strong>senvolvimento da robótica, o comando<br />
numérico, foi <strong>de</strong>senvolvido em seguida e consiste basicamente em sistemas<br />
que po<strong>de</strong>m ser programados através <strong>de</strong> uma série <strong>de</strong> comandos que po<strong>de</strong>m,<br />
por exemplo, representar a posição <strong>de</strong> uma ferramenta no espaço.<br />
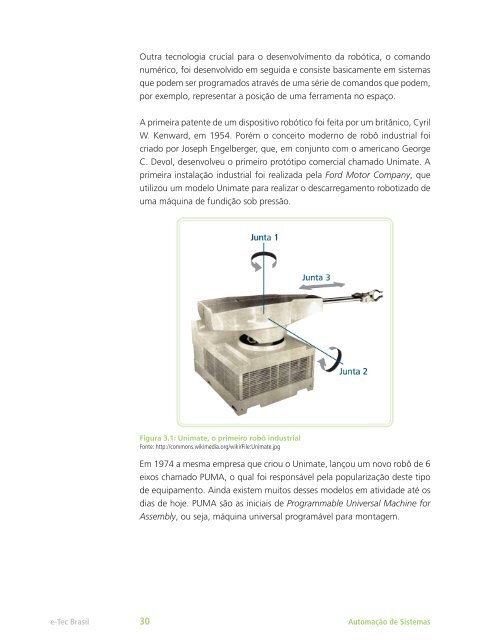
A primeira patente <strong>de</strong> um dispositivo robótico foi feita por um britânico, Cyril<br />
W. Kenward, em 1954. Porém o conceito mo<strong>de</strong>rno <strong>de</strong> robô industrial foi<br />
criado por Joseph Engelberger, que, em conjunto com o americano George<br />
C. Devol, <strong>de</strong>senvolveu o primeiro protótipo comercial chamado Unimate. A<br />
primeira instalação industrial foi realizada pela Ford Motor Company, que<br />
utilizou um mo<strong>de</strong>lo Unimate para realizar o <strong>de</strong>scarregamento robotizado <strong>de</strong><br />
uma máquina <strong>de</strong> fundição sob pressão.<br />
Figura 3.1: Unimate, o primeiro robô industrial<br />
Fonte: http://commons.wikimedia.org/wiki/File:Unimate.jpg<br />
Em 1974 a mesma empresa que criou o Unimate, lançou um novo robô <strong>de</strong> 6<br />
eixos chamado PUMA, o qual foi responsável pela popularização <strong>de</strong>ste tipo<br />
<strong>de</strong> equipamento. Ainda existem muitos <strong>de</strong>sses mo<strong>de</strong>los em ativida<strong>de</strong> até os<br />
dias <strong>de</strong> hoje. PUMA são as iniciais <strong>de</strong> Programmable Universal Machine for<br />
Assembly, ou seja, máquina universal programável para montagem.<br />
e-Tec Brasil 30<br />
<strong>Automação</strong> <strong>de</strong> <strong>Sistemas</strong>