

Automação de Sistemas

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.3.2 Geometria da ca<strong>de</strong>ia cinemática<br />
Essa classificação é <strong>de</strong>finida pela anatomia do robô, ou seja, os tipos <strong>de</strong> juntas<br />
utilizados em seus três primeiros elos são:<br />
• Articulados<br />
• Cartesianos<br />
• Paralelos<br />
• SCARA<br />
4.3.2.1 Robôs articulados<br />
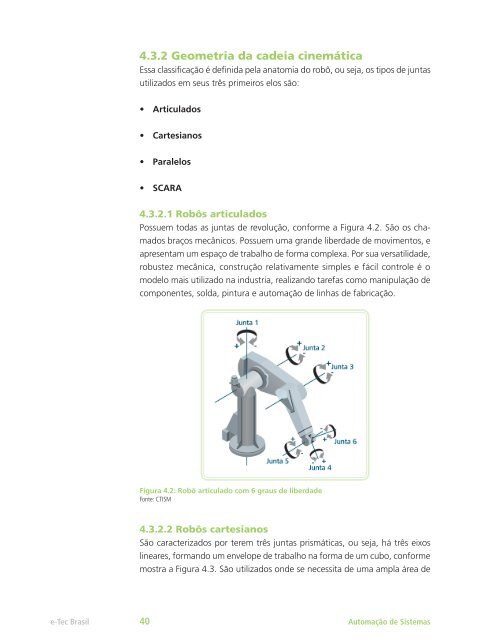
Possuem todas as juntas <strong>de</strong> revolução, conforme a Figura 4.2. São os chamados<br />
braços mecânicos. Possuem uma gran<strong>de</strong> liberda<strong>de</strong> <strong>de</strong> movimentos, e<br />
apresentam um espaço <strong>de</strong> trabalho <strong>de</strong> forma complexa. Por sua versatilida<strong>de</strong>,<br />
robustez mecânica, construção relativamente simples e fácil controle é o<br />
mo<strong>de</strong>lo mais utilizado na industria, realizando tarefas como manipulação <strong>de</strong><br />
componentes, solda, pintura e automação <strong>de</strong> linhas <strong>de</strong> fabricação.<br />
Figura 4.2: Robô articulado com 6 graus <strong>de</strong> liberda<strong>de</strong><br />
Fonte: CTISM<br />
4.3.2.2 Robôs cartesianos<br />
São caracterizados por terem três juntas prismáticas, ou seja, há três eixos<br />
lineares, formando um envelope <strong>de</strong> trabalho na forma <strong>de</strong> um cubo, conforme<br />
mostra a Figura 4.3. São utilizados on<strong>de</strong> se necessita <strong>de</strong> uma ampla área <strong>de</strong><br />
e-Tec Brasil 40<br />
<strong>Automação</strong> <strong>de</strong> <strong>Sistemas</strong>