使ってみよう MEMS等価回路ジェネレータ
使ってみよう MEMS等価回路ジェネレータ
使ってみよう MEMS等価回路ジェネレータ
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
使 ってみようMEMS 等 価 回 路 ジェネレータ静 岡 大 学 電 子 工 学 研 究 所橋 口 原
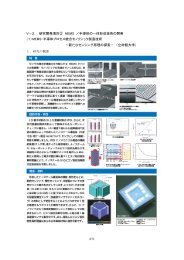
研 究 背 景 と 開 発 目 標アナログデバイセズヨーレートセンサーのブロックダイアグラムセンサーシステムとしてMEMSと回 路 を 一 体 化 した 設 計 が 必 要 。MEMSセンサーMEMS 設 計 者 は 構 造 設 計ができるツールを 使 いたい。ドライブ回 路センシング 回 路開 発 目 標構 造 設 計 からネットリストを 生 成 する 機 能 を 開 発 し、両 者 の 間 を 取 り 持 つ 設計 プラットフォームを 提 供する。等 価 回 路 ジェネレーターhttp://www.analog.com/jp/mems-and-sensors/imems-gyroscopes/adxrs622/products/product.html回 路 設 計 者 はSPICE 等 の回 路 シミュレータを 使 いたい。
等 価 回 路 ジェネレーターとはMEMSのソリッドモデルを 設 計 すると‥‥MEMSの 特 性 を 表 す 等 価 回 路をネットリストとして 出 力* source COMB_PARALLEL_XR_R8 0 P1 P2 1TV_V1 P6 P7 0 DC 0Vdc AC 1Vac・・・ C_C8 0 N11813 100pMEMS-ONEのプラットフォーム 上 で 動 作任 意 形 状 (※)のMEMSに対 応 する 等 価 回 路 生 成 ツールは 世 界 初 。※ 本 プロジェクトでコンポーネント 化 した 構 造 の 組 み 合 わせに 限 る。.subckt COMB_PARALLEL_X 1 2 3 4F_CP1 4 3 V_CP1 51e-6V_CP1 1 5 0VC_C1 4 3 1.5pE_E1 2 5 4 3 51e-6.ends COMB_PARALLEL_Xネットリスト:回 路 の 接 続 情 報 、 素 子 情 報を 記 述 したテキストファイル。SPICEでは 回 路 を 全 てネットリストで 表 現 しシミュレーションしている。
設 計 の 具 体 的 な 流 れ(1)‥ソリッドモデルから等 価 回 路 パラメータ 表 の 自 動 生 成クライアントPC3DCAD(MemsONE)形 状 パラメータの 自 動 抽 出2 端 子 櫛 歯 モデル相 互 変 換 ツールGUI3DCAD 中 間 ファイル等 価 回 路 モデル3 次 元 CAD相 互 変 換 ツールパラメータ 表 セット◆コンポーネントパラメータの自 動 抽 出CADデータから、コンポーネントの 形 状 パラメータと 幾 何 配 置 情 報 ( 幾 何 接 続 情 報 )を 自 動 的 に 抽 出◆コンポーネント 間 の機 械 的 接 続 網 の 自 動 生 成コンポーネント 間 の幾 何 配 置 情 報 から、機 械 的 接 続 網 を 自 動 的 に 生 成機 械 接 続 情 報 テーブルuploaddownloadWEBサーバ 側アンカー梁 バネ梁 バネ梁 バ2 端 子 櫛 歯 アンカーネ梁 バネアンカー幾 何 配 置 情 報 、 機 械 接 続 情 報 の 自 動 生 成
設 計 の 具 体 的 な 流 れ(2)‥ ‥ 等 価 回 路ジェネレータにパラメータを 入 力(1)WEB上 で 設 定 内 容 の 確 認 ・ 変 更 操 作~駆 動 回 路 など 周 辺 回 路 の 設 定コンポーネントの 接 続 情 報 の 設 定 画 面幾 何 的 接 続 情 報 画 面(2) 電 気 ・ 機 械 パラメータの 抽 出 結 果 の 表 示 と 編 集各 コンポーネントの直 流 動 作 点 における 電 気 ・ 機 械 特 性パラメータを 抽 出電 気 ・ 機 械 パラメータの 抽 出櫛 歯 コンポーネント電 気 ・ 機 械 パラメータの 抽 出 結 果
設 計 の 具 体 的 な 流 れ(3)‥シミュレーション(3) 結 果 表 示 図 、 解 析 条 件 指 示 後 、ネットリスト 生 成1Z m 3− H 3e 31rv 30 jω1kjω m− H 1e 1グラフ 理 論 に 基 づき、 見 た 目の 接 続 の 双 対 回 路 を 生 成v 1Z m 2v 21− H 2e 2回 路 シミュレーション 解 析 条 件 設 定SPICEネットリストの 生 成 とダウンロード(4) 計 算 の 実 行 と 結 果 表 示Web 上 で 電流 値 、 変 位 などの 計 算 結 果が 見 れるSPICE3の 実 行 と 結 果 一 覧シミュレーション 結 果 の 表 示
等 価 回 路 ジェネレータの 特 徴2 種 類 の 等 価 回 路 手 法 を 採 用→ 電 気 端 子 から 見 た 特 性 インピーダンスを 導 出 し、 回 路 合 成 により 等 価回 路 を 生 成 (MEMS 形 状 に 関 する 汎 用 性 なし、 外 力 なし)→ 電 気 端 子 と 機 械 端 子 を 有 し、 変 換 係 数 を 従 属 電 源 により 表 現• 機 械 系 の 自 由 度 が3 次 元•MEMS-MEMS 練 成 における 回 路 合 成 に 対 応• 形 状 パラメータの 判 別 、 抽 出• 電 界 のフリンジ、バネの 非 線 形 も 考 慮 したパラメータ 抽 出モデル 化 コンポーネント静 電 型 アクチュエータ磁 気 アクチュエータ(1ターンカンチレバー)圧 電 カンチレバー音 響 回 路各 種 梁 構 造
櫛 歯 アクチュエータ 加 速 度 センサの 動 作 原 理- 櫛 歯 アクチュエータの2 次 元 等 価 回 路 ーDeDvxCmv x•eCm•− C m••−C′′yBvyv yBe櫛 歯 がギャップ 方 向 にずれるとこのキャパシタンスがそのずれに 応 じて 大 きくなる。x 方 向 の 速 度 成 分 により、y 方 向に 力 が 生 じる。このy 方 向 の 振 動 振 幅 により加 速 度 を 計 測 。y 方 向 にx 方 向 と 同 じ 周 波 数 の動 が 生 じる。
櫛 歯 加 速 度 センサの 構 造y 方 向 の 振 動 を検 出 する 櫛 歯加 速 度 によりギャップ 方 向にずれる 櫛 歯x 方 向 に振 動 する櫛 歯ProofMassx 方 向のバy 方 向のバ
コンポーネントに 分 けて 名 前 を 付 けるアンカーコンポーネントAn3剛 体 フレームコンポーネントFrameSp5An2Comb2Sp1 Sp2Comb12 端 子 櫛 歯 コンポーネントSp6An4梁 バネコンポーネントSp7An1Sp3Sp4Sp8An5An7Comb3An6
コンポーネントごとに 寸 法 を 決 めるComb1の 場 合マニュアルを 見 ながら 各 寸 法 を 入 力 する。コンポーネントの 接 続 情 報をメモしておく。全 てのコンポーネントに 向 きがあるので 注意 !1はSp1の1とSp2の15は5はAn1の33はSp3の2とSp4の2
梁 バネの 場 合Lは 長 さ、Wは 幅 、Tは 厚 みデフォルトでは 横 向 きになっています。SP1~SP4まで、 左 90 度回 転 を 選 択 しています。
等 価 回 路 ジェネレータを 呼 び 出 す
等 価 回 路 ジェネレータにコンポーネントを 登 録コンポーネントの 名 前 を 入 力
コンポーネントごとに 構 造 パラメータを 入 力Sp1の 場 合回 転 情 報 を 入 れる。こちらを 入 力こちらは 自 動計 算 される
コンポーネントの 接 続 情 報 を 入 力 1Comb1とAn1の 場 合回 転 なしで3と5が 接 続 する。
コンポーネントの 接 続 情 報 を 入 力 2Comb2とFrameの 場 合右 90 度 回 転Comb2の2とFrameの2が 接 続
コンポーネントの 接 続 情 報 を 入 力Sp5 及 びSp7とFrameの 場 合右 90 度 回 転Sp5どちらともFrameの1に 接 続 ※Sp7※ 現 在 は3 次 元 並 進 運 動 のみ 考 慮
ここを 押 すと、バネ 定 数 や質 量 、 電 気 機械 係 数 などの回 路 シミュレーション 用 パラメータが 計 算されるパラメータ 抽 出
パラメータ 抽 出 後 の 確 認 1ここを 確 認 !
パラメータ 抽 出 後 の 確 認 2櫛 歯 アクチュエータの 場 合 、浮 遊 容 量 を 個 別 に 入 力 する必 要 があります。通 常 は、 櫛 歯 アクチュエータに 接 続 されているアンカーのパッド 容 量 などを 個 別 に 計 算して 入 れます。
構 造 接 続 情 報 の 確 認ここを 押 すと 右 のようなコンポーネント 接 続情 報 グラフが 現 れる。電 気 回 路 は、 図 中 のjoint@という 点 へ 接続 するので、 実 際 の構 造 とjoint 点 の 対 応を 読 み 取 る 必 要 がある。
joint8joint3Joint 情 報 の 取 得joint2joint9joint4joint1joint7joint5joint6
解 析 方 法 の 選 択このコンボボックスから 選 択 する。
周 辺 回 路 情 報 の 入 力接 続 したい 素 子 を 選 んでIDを 適 当 に 入 力Jointとグランド 端 子 が 表示 されるのでそこから 選 ぶ。
接 続 した 素 子 のパラメータ 入 力
周 辺 回 路 接 続 の 確 認出 力 取 り 出 し用 ダミー 電 源接 続 した抵 抗AC 電 源
制 御 パラメータと 出 力 設 定
ネットリストの 取 得
シミュレーションの 実 行
グラフの 表 示 やデータの 取 得
加 速 度 がy が 方 向 にかかると加 速 度の 向 きProof Mass=8.9×10 -8 kgComb1のyとComb2 及 びComb3のx 方 向 の 重 なりY 変 位 の 分 gapを 変 更
出 力 櫛 歯 アクチュエータの 電 流0.02G0.2G20pA25pA2G200pAピーク 電 流 が 加 速 度 と共 に 増 大 。ピーク 周 波 数 がわずかに 高 い 方 にシフト。
等 価 回 路 ジェネレータwebhttp://mmc.la.coocan.jp/memspedia/web_library/