Fö 3: Partikeldynamik - IFM
Fö 3: Partikeldynamik - IFM
Fö 3: Partikeldynamik - IFM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
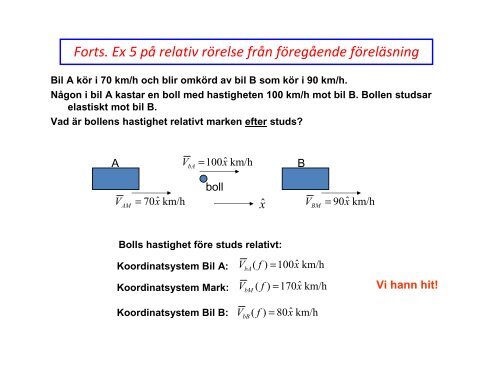
Forts. Ex 5 på relativ rörelse från föregående föreläsning<br />
Bil A kör i 70 km/h och blir omkörd av bil B som kör i 90 km/h.<br />
Någon i bil A kastar en boll med hastigheten 100 km/h mot bil B. Bollen studsar<br />
elastiskt mot bil B.<br />
Vad är bollens hastighet relativt marken efter studs?<br />
A V ˆ<br />
bA = 100x km/h B<br />
V 70xˆ<br />
AM =<br />
km/h<br />
boll<br />
Bolls hastighet före studs relativt:<br />
Koordinatsystem Bil A:<br />
Koordinatsystem Mark:<br />
Koordinatsystem Bil B:<br />
V bA<br />
V bM<br />
V bB<br />
xˆ<br />
( f ) = 100xˆ<br />
km/h<br />
V 90xˆ<br />
BM =<br />
( f ) = 170xˆ<br />
km/h<br />
( f ) = 80xˆ<br />
km/h<br />
km/h<br />
Vi hann hit!
Dynamik är läran om rörelsers orsak.<br />
<strong>Partikeldynamik</strong><br />
En partikel är en kropp där utsträckningen saknar betydelse för dess rörelse. Den<br />
kan betraktas som en punktmassa utan rotation.<br />
Massa kan definieras på två sätt. Den ena baserar sig på att olika massor attraheras<br />
olika starkt av jordens gravitation. Att två massor är lika kan bestämmas med en<br />
balansvåg. I en fjädervåg är uttänjningen proportionell mot massan.<br />
Enligt denna definition är massa ett mått på hur gravitationen påverkar en kropp,<br />
man talar om "tung massa".<br />
Den andra definitionen är: Massan anger vilken kraft som åtgår för att ge en kropp<br />
en viss acceleration, "trög massa".<br />
m<br />
Balansvåg<br />
m<br />
Fjädervåg
Newtons I:a lag (tröghetslagen)<br />
En partikel är fri om den inte påverkas av några krafter (finns?)<br />
En fri partikel befinner sig i vila eller rör sig med konstant hastighet (dvs i en rät linje)<br />
Detta är Newtons I:a lag även kallad tröghetslagen.<br />
Observera att även observatören av rörelsen måste vara fri (finns?), dvs. mätningen<br />
måste göras i ett inertialsystem. Ett inertialsystem accelererar inte (och får därför inte<br />
rotera, eftersom rotation innebär acceleration). Har man hittat ett inertialsystem<br />
kommer alla system som rör sig med konstant hastighet relativt detta också att vara<br />
inertialsystem.
Begreppet rörelsemängd (eng. momentum)<br />
Två fria partiklar med massorna m 1 och m 2 och hastigheterna v 1 och v 2 påverkar varandra i<br />
det skuggade området.<br />
Efter att ha påverkat varandra har de hastigheterna v 1 ´ och v 2 ´ och Δv 1 och Δv 2 är<br />
motriktade (experimentellt bevisat).<br />
Beloppen av Δv 1 och Δv 2 är relaterade till m 1 och m 2 enligt:<br />
Vektorrelation: ΔΔΔΔv 1 m 1 = −−−− ΔΔΔΔv 2 m 2<br />
Definiera rörelsemängd (vektor) enligt: p = mv, ΔΔΔΔp = mΔΔΔΔv<br />
⏐ΔΔΔΔv 1 ⏐/ ⏐ ΔΔΔΔv 2 ⏐ = m 2 / m 1 (experimentellt bevisat).<br />
ΔΔΔΔp 1 = − ΔΔΔΔ p 2<br />
I ord: När två partiklar påverkar varandra utbyts rörelsemängd
p 1<br />
p 2<br />
p 2 ´<br />
Totala rörelsemängden vid tid t P = p1 + + + + p2 vid tid t´ P´ = p´ 1 + + + + p´ 2<br />
P = P´<br />
Totala rörelsemängden hos ett system av två partiklar som enbart<br />
påverkar varandra förblir konstant.<br />
P = p1 + + + + p2 = konstant<br />
Gäller även för många partiklar enligt:<br />
p 1 ´<br />
Rörelsemängdskonservering<br />
p 2 ´<br />
p 2<br />
ΔΔΔΔp 2 p 1<br />
p 1 ´<br />
P<br />
ΔΔΔΔp 1<br />
= ∑<br />
ΔΔΔΔp 1 = p´ 1 −−−− p 1<br />
p<br />
1<br />
+<br />
p<br />
2<br />
+<br />
p<br />
3<br />
+<br />
ΔΔΔΔ p 2 = p´ 2 −−−− p 2<br />
p´ 1 −−−− p1 = −−−− (p´ 2 −−−− p2 ) = −−−− p´ 2 + + + + p2 p´ 1 + + + + p´ 2 = p1 + + + + p2 ...<br />
=<br />
konstant<br />
Exempel: 1,2
Newtons II:a och III:e lag<br />
Sätt F = dp /dt förändringen av rörelsemängd per tidsenhet är lika med<br />
kraften som verkar på partikeln<br />
Om m ej beror av t (vanligt): F =dp /dt =m dv /dt = m a<br />
Sorten för kraft får vi ur ekvationen ovan:<br />
"Newton" = [kg m/s 2 ]<br />
Newtons II:a lag<br />
Detta ger en andra definition av massa: Massan anger vilken kraft som åtgår för att<br />
ge en kropp en viss acceleration, "trög massa".<br />
trög massa = tung massa<br />
Därför får alla kroppar samma acceleration i ett gravitationsfält (ca 9.8 m/s 2 på<br />
jorden).<br />
W=mg Tyngden W är den kraft som krävs för att förhindra en kropp med<br />
massan m att falla pga gravitationsaccelerationen.
Om två partiklar påverkar varandra gäller:<br />
ΔΔΔΔp 1 = −ΔΔΔΔp 2<br />
Dela med ΔΔΔΔt dp 1 /dt = −p 2 /dt<br />
ΔΔΔΔt →0<br />
Newtons II:a och III:e lag<br />
F 1 = −−−−F 2<br />
Newtons III:e lag<br />
I ord: Om en kropp påverkar en annan med en given kraft så återverkar<br />
den senare kroppen på den första med en lika stor men motsatt riktad<br />
kraft<br />
Exempel: 3,4
Galile transformation (Konstant relativ v)<br />
r´ = r − vt<br />
V´= V − v<br />
a´ = a<br />
t´= t<br />
Klassiska relativitetsprincipen<br />
m 1 V 1 + m 2 V 2 = konst (S inertialsystem)<br />
V´ 1 = V 1 − v och V´ 2 = V 2 − v<br />
m 1 (V´ 1 + v ) + m 2 (V´ 2 + v ) = konst<br />
m 1 V´ 1 + m 2 V´ 2 = konst − v(m 1 + m 2 )<br />
Eftersom v är konstant får vi:<br />
m 1 V´ 1 + m 2 V´ 2 = ny konst<br />
Alltså bevaras rörelsemängden även i S´.
Galile transformation (Konstant relativ v)<br />
r´ = r − vt<br />
V´= V − v<br />
a´ = a<br />
t´= t<br />
Klassiska relativitetsprincipen<br />
Krafterna:<br />
F = dp/dt = m dV/dt = ma (Newton II)<br />
F´= dp´/dt = m dV´/dt = ma´<br />
Eftersom a´ = a blir F = F´<br />
Slutsats: Rörelsemängden konserveras och<br />
samma krafter mäts i inertialsystem som rör<br />
sig med konstant hastighet relativt varandra.
S<br />
S´ a r<br />
m<br />
S är inertialsystem<br />
S´ accelererar relativt S<br />
a mätt i S<br />
a´ mätt i S´<br />
m är massan hos kroppen<br />
Tröghetskrafter<br />
Med tröghetskrafter menas krafter som uppstår i accelererade koordinatsystem. Betraktas<br />
situationen från ett inertialsystem (utan acceleration) kommer tröghetskrafterna inte att<br />
ingå i beskrivningen.<br />
a´= a −−−− a r<br />
Från S mäts F = ma<br />
Från S´ mäts F´ = ma´<br />
F´ = ma´= m(a −−−− a r )= F − ma r<br />
f = − ma r Tröghetskraft<br />
(Kallas även fiktiv eller skenbar kraft)
Ex. 1 Person i accelererande bil<br />
Tröghetskrafter<br />
S: Jorden S´: Bilen m: Personens vikt<br />
a´= 0 eftersom personen sitter still i bilen<br />
a r = bilens acceleration i positiv x-riktning<br />
Betraktat utifrån (S): Personen accelererar med a r eftersom den påverkas med kraften<br />
F =ma r från bilen som verkar i positiv x-riktning<br />
Personen inne i bilen: Jag sitter still men påverkas av en kraft f = − ma r<br />
(minustecknet visar att kraften verkar i negativ x-riktning)<br />
S<br />
S´ a r<br />
m<br />
a mätt i S<br />
a´ mätt i S´<br />
S är inertialsystem<br />
S´ accelererar relativt S<br />
m är massan hos kroppen
Ex. 2 Sten i ett snöre som snurrar runt<br />
S är ett inertialsystem (accelererar ej)<br />
Tröghetskraften centrifugalkraft<br />
S´ systemet roterar med stenen som är fäst med ett snöre i<br />
centrum<br />
Sett från S: Stenen roterar med vinkelhastighet ω, och har en<br />
centripetalacceleration. Eftersom den accelererar in mot centrum<br />
måste den påverkas av en kraft från snöret i denna riktning som är<br />
lika med F S = mω 2 R u N<br />
Sett från S ´ : Stenen står still och påverkas av två krafter: En<br />
utåtriktad centrifugalkraft F C = −mω 2 R u N och en lika stor och<br />
motriktad kraft i snöret F S = mω 2 R u N . Dessa krafter tar ut<br />
varandra så stenen befinner sig i vila här.<br />
Allmänna uttrycket för centrifugalkraft: FC = − mωωωω×( ω ω ω ω × r )
ω<br />
v<br />
Sett utifrån.<br />
Plattan roterar.<br />
Kulan går rakt<br />
fram och träffar<br />
ej siktpunkten.<br />
Tröghetskraften corioliskraft<br />
Sett från plattan.<br />
Ingen rotation.<br />
Kulans kurva tycks<br />
böja av åt höger.<br />
Tänk er att figurerna visar en platta fäst vid<br />
nordpolen. Periferin kommer då att röra<br />
sig moturs. Sett från ett inertialsystem<br />
kommer en kula att färdas i en rät linje om<br />
den skjuts ut från centrum. Skytten siktar<br />
mot den röda punkten som roterar med<br />
plattan.<br />
Då plattan roterar kommer kulan att missa<br />
siktpunkten.<br />
Corioliskraften gör att<br />
partikelbanor avlänkas åt höger på<br />
norra halvklotet, vilket bl.a. leder<br />
till den karaktäristiska rotationen<br />
hos vädersystem.
Relativ rotationsrörelse<br />
m<br />
Coriolis acceleration: a co = −2 ωωωω× V´<br />
Corioliskraft: F CO = −2 m ωωωω× V'<br />
O ser att O´ roterar med ωωωω<br />
O´ ser att O roterar med − ωωωω<br />
P:s hastighet för O: V = (dr/dt) O<br />
Om P stilla relativt O´ ser O att P<br />
har hastigheten:<br />
V= ω ω ω ω × r<br />
Men om P har hastighet V´ relativt<br />
O´ ser O hastigheten:<br />
V = V´ + ω ω ω ω × r<br />
<strong>Fö</strong>r acceleration gäller:<br />
a = a´ + 2ωωωω× V´ + ωωωω × ( ωωωω × r)<br />
a´ = a − 2ωωωω× V´ − ωωωω × ( ωωωω × r)<br />
(OBS fel i Alonso Finn)<br />
Centrifugalacceleration: a c = − ωωωω × ( ωωωω × r)<br />
Centrifugalkraft: F C = − mωωωω × ( ωωωω × r)
Centrifugalaccelerationens inverkan på tyngdaccelerationen<br />
Beräkning av effektivt g<br />
g= g 0 − 2ωωωω× V´ − ωωωω × ( ωωωω × r)<br />
Här är g 0 jordens gravitation utan rotation (eller gravitationen en<br />
observatör mäter som inte roterar med jorden).<br />
Vid små hastigheter (V´ ) kan bidraget från coriolis accelerationen<br />
försummas eftersom 2ωωωω× V´

![Read more [PDF] - IFM - Linköping University](https://img.yumpu.com/51852190/1/184x260/read-more-pdf-ifm-linkoping-university.jpg?quality=85)