Сравнение методов местоопределения источников ...
Сравнение методов местоопределения источников ...
Сравнение методов местоопределения источников ...
- TAGS
- www.ess.ru

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
КОЗЬМИН Владимир Алексеевич, кандидат технических наук, доцент<br />
САВЕЛЬЕВ Алексей Михайлович,<br />
УФАЕВ Владимир Анатольевич, доктор технических наук<br />
ЧУБОВ Евгений Алексеевич<br />
СРАВНЕНИЕ МЕТОДОВ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ<br />
РАДИОИЗЛУЧЕНИЯ<br />
Определение местоположения (ИРИ) с помощью мобильной станции радиомониторинга<br />
является сложной задачей ввиду многолучевого распространения радиоволн и частого<br />
отсутствия прямой видимости. Совместная работа мобильной станции с сетью постов<br />
радиопеленгования стационарной системы значительно упрощает и ускоряет процедуру<br />
<strong>местоопределения</strong> ИРИ[1]. Но стационарная система, как правило, не обеспечивает<br />
полного покрытия всей необходимой территории, а поэтому задача определения<br />
местоположения ИРИ одиночной мобильной станцией по-прежнему остается актуальной.<br />
При одиночной работе мобильной станции для определения местоположения ИРИ может<br />
использоваться несколько <strong>методов</strong>: метод привода, квазистационарный метод и метод<br />
вычисления координат <strong>источников</strong> в движении [2].<br />
Метод привода основан на движении мобильной станции в зону расположения ИРИ по<br />
направлению пеленгов и росту амплитуды сигнала, в результате поиска мобильная<br />
станция оказывается в непосредственной близости от ИРИ. Квазистационарный метод<br />
сводится к нескольким сеансам пеленгования ИРИ из удаленных друг от друга<br />
стационарных позиций, координаты оцениваются на карте по засечкам, которые дают<br />
пересекающиеся пеленги. Метод вычисления координат в движении основан на<br />
непрерывном пеленговании и измерении амплитуды сигнала во время всего движения<br />
станции.<br />
Если в состав мобильной станции входит быстродействующее радиооборудование,<br />
навигационная аппаратура и соответствующее программное обеспечение, то, как<br />
свидетельствует практика, метод вычисления координат ИРИ в движении охотно<br />
используется операторами мобильных станций. Это объясняется тем, что при движении<br />
станции происходит непрерывный прием радиосигналов, что особенно важно при<br />
пеленговании периодически или кратковременно работающих <strong>источников</strong>, также<br />
возможно использование многоканального пеленгования для определения координат<br />
нескольких ИРИ одновременно, обеспечивается скрытность работы станции, поскольку<br />
она находится в потоке городского транспорта. При этом не запрещено пользоваться
2<br />
методом привода или, если встречается «хорошая» позиция, например на доминирующей<br />
высоте, то поработать на остановке, а затем продолжить поиск в движении.<br />
Использование метода вычисления координат ИРИ в движении становится возможным<br />
при наличии программного обеспечения, позволяющего работать с одиночной мобильной<br />
станцией как с территориально распределенной многопозиционной системой. В<br />
специальном математическом обеспечении картографии и навигации СМО-КН для<br />
мобильной станции радиомониторинга АРГУМЕНТ реализовано несколько <strong>методов</strong><br />
оценки координат ИРИ [3, 4]:<br />
▪ матричный метод;<br />
▪ кластерный метод;<br />
▪ метод максимума правдоподобия;<br />
▪ амплитудный метод;<br />
▪ амплитудно-угломерный метод.<br />
Целью настоящей статьи является систематизация перечисленных <strong>методов</strong>, рассмотрение<br />
результатов их экспериментальной проверки в городских условиях и в загородной зоне,<br />
выбор <strong>методов</strong>, которые наиболее удобны для практики определения местоположения<br />
ИРИ одиночной мобильной станцией.<br />
Рассмотрим вначале основные принципы, которые лежат в основе названных <strong>методов</strong><br />
оценки координат ИРИ.<br />
Методы оценки координат ИРИ<br />
Во всех методах мобильная станция радиомониторинга, находящаяся в движении,<br />
рассматривается как многопозиционная система с поочередной обработкой принимаемых<br />
сигналов из точек, составляющих маршрут станции. Определение координат ИРИ<br />
осуществляется путем пространственно-временной обработки результатов измерения<br />
пеленгов или амплитуд принимаемых сигналов.<br />
Матричный метод оценки местоположения ИРИ основан в использовании матричной<br />
сетки, покрывающей рабочую зону на электронной карте, размер ячеек сетки подбирается<br />
в зависимости от величины рабочей зоны и требуемой точности.<br />
Сетка рассматривается как растр, пеленги прокладываются в ней растровым алгоритмом,<br />
они суммируются по амплитуде в ячейках сетки. В результате получается трехмерная<br />
поверхность с максимумами в тех ячейках сетки, где пеленги чаще накладывались друг на<br />
друга и имели большую амплитуду. Решение о местоположении ИРИ принимается для<br />
той ячейки, которой соответствует наибольшее накопленное значение.
3<br />
Поверхность пеленгов отображается на карте в виде фигуры с цветовым выделением<br />
амплитуды, аналогично цветовой шкале высот. Задавая порог отображения в процентах от<br />
абсолютного максимума можно регулировать объем отображаемой информации.<br />
Для автоматического определения максимумов используется специальный алгоритм, в<br />
результате находятся изолированные области, амплитуда в которых превышает значение<br />
порога. Затем для каждой изолированной области определяется «центр», представляющий<br />
собой координаты абсолютного максимума, если он четко выражен, либо<br />
математического ожидание области в случае, если картина «размазана». Координаты<br />
«центра» изолированной области выше порога считаются расчетной точкой расположения<br />
ИРИ [2].<br />
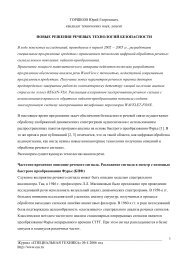
На рис. 1 показано отображение поверхности пеленгов для матричного алгоритма.<br />
Мобильный пеленгатор обозначен белым кружком со стрелкой, расчетная точка –<br />
светлым кружком.<br />
При одновременной работе нескольких радиостанций на одной частоте на поверхности<br />
пеленгов можно наблюдать два или больше сравнимых по величине максимума. В<br />
результате может быть выявлено несколько <strong>источников</strong> радиоизлучения, работающих на<br />
одной частоте.<br />
К достоинствам матричного метода можно отнести вычислительную простоту, что дает<br />
возможность использования ПЭВМ с небольшим быстродействием.<br />
Основным недостатком метода является невозможность вычисления координат ИРИ в<br />
случае, если мобильная станция перемещается по направлению к точке расположения<br />
ИРИ. Действительно, в этом случае пеленги будут проходить через одни и те же ячейки<br />
матрицы, в результате будет формироваться поверхность в виде протяженного «гребня» с<br />
большой амплитудой, а не в виде локальной области с четко выраженным максимумом в<br />
месте расположения ИРИ. Другими словами, использование этого метода затруднено при<br />
работе мобильной станции по методу привода. Кроме того, для сети из стационарных<br />
пеленгаторов при пеленговании неподвижного ИРИ пеленги так же будут проходить через<br />
одни и те же ячейки матрицы, создавая «гребни».
Рис. 1. Отображение поверхности пеленгов и расчетной точки по матричному методу<br />
Кластерный метод является развитием матричного метода. В его основе лежит метод<br />
моментов [5]. Исходные данными для расчетов являются: выборка пеленгов n θ ,<br />
измеренных с учетом курсового угла пеленгатора, координаты пеленгатора на момент<br />
, где n = 0,...,<br />
N −1<br />
− номер пункта приема.<br />
приема Zn = Xn + j⋅Yn Измеренные пеленги приравнивают к истинным значениям, зависящим от неизвестных<br />
координат (x, y) ИРИ<br />
4<br />
<br />
θn = θn<br />
(x, y) = arg( z<br />
(x, y) − Z<br />
n ) , (1)<br />
где arg(y) − означает операцию вычисления аргумента комплексной функции y. Из<br />
выражения (1) имеем уравнение линии пеленга<br />
y = Y + (x −X ) ⋅tgθ <br />
<br />
(n) n (n) n n<br />
Уравнение линии пеленга (2) есть луч в декартовой системе координат. Представим этот<br />
луч как функцию двух переменных<br />
⎧<br />
<br />
1, если x = x n,y= y n;<br />
z n (x,y) = ⎪<br />
⎨<br />
⎪<br />
(3)<br />
⎪⎩ 0, если x ≠ x n,y≠ y n.<br />
При однократном пеленговании координаты источника неоднозначны, поэтому<br />
осуществляют их усреднение по совокупности пеленгов, полученных в n позициях<br />
мобильной станции, максимизация функции (3) обеспечивает оценку координат ИРИ<br />
.<br />
(2)
5<br />
⎛ ⎞<br />
(x,y) arg⎜ <br />
= max z (x,y) ⎟ , (4)<br />
∑<br />
⎜ n ⎜⎝ (x,y) ⎟<br />
n ⎠<br />
где arg ( y ) обозначает операцию вычисления значений аргументов функции y.<br />
Техническая реализация кластерного метода также основана на использовании матричной<br />
сетки, покрывающей рабочую зону на карте. Но в ячейках сетки накапливаются не линии<br />
пеленгов, а засечки − точки пересечения пеленгов, которые определяются как решения<br />
триангуляционной задачи. В результате образуется трехмерная поверхность, амплитуда<br />
будет больше в тех ячейках сетки, где пеленги чаще пересекались друг с другом.<br />
Первая часть алгоритма состоит в построении поверхности пеленгов. Задача триангуляции<br />
сводится к вычислению координат точки пересечения пеленгов для двух позиций<br />
мобильной станции с известными координатами. По сравнению с матричным методом<br />
вычисление координат точек пересечения пеленгов требует больших вычислительных<br />
ресурсов. Для определения точек пересечения используются все значения пеленгов.<br />
Каждой точке присваивается весовой коэффициент, учитывающий угол пересечения<br />
пеленгов, коэффициент будет тем больше, чем ближе к 90º значение угла пересечения.<br />
Вторая часть алгоритма состоит в определении на матрице центров зон максимумов. Здесь<br />
используются те же самые приемы, что и в матричном методе.<br />
На рис. 2 показано отображение поверхности пеленгов для кластерного алгоритма.<br />
Как и для матричного метода, при одновременной работе нескольких радиостанций на<br />
одной частоте на поверхности пеленгов наблюдаются несколько максимумов, то есть<br />
кластерный метод обеспечивает определение координат нескольких ИРИ, работающих<br />
одновременно на одной частоте.<br />
К достоинствам кластерного метода можно отнести возможность определения<br />
местоположения ИРИ по меньшему числу пеленгов, чем для матричного алгоритма,<br />
возможность использования для <strong>местоопределения</strong> в территориально распределенной<br />
системе, состоящей из стационарных радиопеленгаторов.<br />
Основным недостатком метода является большой объем вычислительных затрат. Поэтому<br />
для кластерного метода желательно использование ПЭВМ с высоким быстродействием.<br />
Кластерный метод, как и матричный, не позволяет вычислять координаты ИРИ в случае<br />
перемещения мобильной станции по направлению к источнику.
Рис. 1. Отображение поверхности пеленгов и расчетной точки по кластерному методу<br />
Метод максимума правдоподобия основан на описании выборки некоррелированных<br />
пеленгов многомерной нормальной плотностью распределения вероятностей<br />
6<br />
N−1 1<br />
1<br />
2<br />
2 ∑ σθ n= 0<br />
w ⎡θ,x,y⎤= ⎢⎣ ⎥⎦<br />
⋅e<br />
(2 πσ ⋅ )<br />
N<br />
2 2<br />
θ<br />
<br />
− ⋅ −<br />
( θn θn(x,y)<br />
)<br />
где 2 σ θ − дисперсия измерений пеленгов, зависящая от инструментальной ошибки<br />
пеленгования, отношения сигнал-шум, условий распространения радиоволн, n<br />
θ<br />
выборка значений пеленгов, (x, y)<br />
n θ − неизвестное истинное значение пеленга для n-ой<br />
позиции мобильной станции.<br />
Оценка координат ИРИ соответствует координатам максимума функции правдоподобия<br />
(5) или минимума оценочной дисперсии.<br />
⎛ ⎛ 1 N−1 <br />
2 ⎞⎞<br />
(x,y) = arg⎜min ⎜ ∑ ( θn −θn(x,y)<br />
) ⎟<br />
N<br />
⎟<br />
⎝ ⎠<br />
(x,y) ⎝ n= 0<br />
⎠<br />
где arg ( z ) обозначает операцию вычисления значений аргументов функции z.<br />
При практической реализации рассмотренного метода используется последовательное по<br />
мере увеличения количества полученных пеленгов вычисление координат ИРИ [2].<br />
2<br />
,<br />
,<br />
(5)<br />
−<br />
(6)
7<br />
Метод максимума правдоподобия, как и два предыдущих метода, не может вычислить<br />
координаты ИРИ в случае перемещения мобильной станции по направлению к нему.<br />
Амплитудный метод основан на учете зависимости амплитуды поля источника от<br />
расстояния до него. Исходные данные: выборка амплитуды и координаты пеленгатора на<br />
момент приема. В предположении, что выборочные комплексные амплитуды сигналов<br />
<br />
не связаны между собой, они задаются многомерной нормальной плотностью<br />
Sn<br />
распределения вероятностей<br />
<br />
w( S,x,y ) =<br />
1<br />
⋅e<br />
N<br />
2 2 (2 π⋅σ )<br />
N−1⎛ 1 µ i⋅ϕ<br />
⎞<br />
− ⋅ S n<br />
2 ⎜ ∑ n − ⋅e<br />
2σ<br />
⎜<br />
⎟<br />
p<br />
n= 0 r n (x,y) ⎟<br />
⎝ ⎠<br />
где 2<br />
σ − дисперсия шума в канале приема, ϕ n − начальная фаза сигнала, µ −<br />
энергетический параметр, rn<br />
( x,<br />
y)<br />
= z<br />
( x,<br />
y)<br />
− Z<br />
n − расстояние от источника до точки<br />
приема.<br />
Зависимость амплитуды напряженности поля в точке приема от пространственного<br />
положения источника в данном случае определяется параметром распространения p Эта<br />
зависимость может быть более сложной с учетом рельефа местности, плотности<br />
застройки. Энергетический параметр µ определяется мощностью излучения, высотами<br />
поднятия антенн передатчика и пеленгатора, длиной волны излучения. Выполнив<br />
усреднение функции правдоподобия (7) по неизвестным параметрам µ и ϕ n , приходим к<br />
выражению<br />
N 1<br />
2<br />
⎛ ⎛ −<br />
⎛ −p<br />
⎞ ⎞⎞<br />
⎜ ⎜ S N 1<br />
n r n (x,y)<br />
− ⎜∑⋅⎟ ⎟⎟<br />
⎜ 2 ⎜ ⎝ n= 0<br />
⎠ ⎟⎟<br />
⎜ n<br />
(x,y) ⎜∑N−1 ⎟⎟<br />
n= 0<br />
−⋅ 2p<br />
⎜ ⎜ r n (x,y) ⎟⎟<br />
⎜ ∑<br />
⎜ n= 0<br />
⎟⎟<br />
<br />
(x,y) = arg min S<br />
−<br />
⎝ ⎝ ⎠⎠<br />
В программе СМО-КН в реализации амплитудного метода учитываются также<br />
зависимости напряженности поля от рельефа местности, городской застройки, лесных<br />
массивов, а также отражение сигналов от кварталов домов.<br />
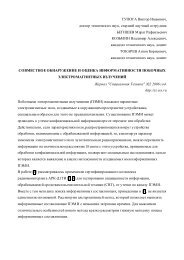
В качестве примера, на рис. 3 показана поверхность уровней сигнала, полученная в ходе<br />
определения местоположения ИРИ. Белый кружок соответствует расчетной точке,<br />
флажками показаны точки измерения и уровни сигналов, использованные для вычисления<br />
координат ИРИ.<br />
.<br />
2<br />
,<br />
(7)<br />
(8)
Рис. 2. Поверхность уровней сигнала и расчетная точка по амплитудному методу<br />
8<br />
Очевидно, что при использовании амплитудного метода желательно выбирать такой<br />
маршрут движения станции, чтобы наблюдалось явное изменение амплитуды сигнала.<br />
Для реализации амплитудного метода достаточно наличие измерительного приемника и<br />
навигационной аппаратуры, при этом непосредственно радиопеленгатор не требуется, что<br />
в ряде случаев оказывается предпочтительным по критерию стоимости оборудования.<br />
Амплитудно-угломерный метод основан на комплексном использовании информации об<br />
амплитуде и пеленге, он объединяет амплитудный метод и метод максимума<br />
правдоподобия. Правило оценки координат при независимых измерениях состоит в<br />
минимизации произведения<br />
⎧ 2<br />
⎧ ⎛ N−1 ⎛<br />
<br />
−p<br />
⎞ ⎞⎫⎫<br />
⎪ ⎪ ⎜ S N 1 2<br />
n r n (x,y)<br />
N 1 2<br />
− ⎜ ⋅ ⎟ ⎟⎪⎪<br />
⎪ ⎪ − <br />
∑<br />
⎜ ⎝ n= 0<br />
⎠ ⎟⎪⎪<br />
⎨ ⎨( ∑ ( n n ) ) n<br />
(x,y)<br />
N−1 n= 0 ⎜∑⎟⎬⎬ ⎪ ⎪ n= 0<br />
−⋅ 2p<br />
⎜ r n (x,y) ⎟⎪⎪<br />
⎪ ⎪ ⎜ ∑<br />
n= 0<br />
⎟⎪⎪<br />
<br />
(x,y) = arg min θ −θ (x,y) ⋅ S<br />
−<br />
⎩ ⎩ ⎝ ⎠⎭⎭<br />
Учет совокупности значений пеленгов и амплитуд, зависящих от координат источника, в<br />
(9), обеспечивает уменьшение времени <strong>местоопределения</strong> ИРИ. Кроме того,<br />
обеспечивается оценка координат ИРИ при движении мобильной станции на ИРИ, что<br />
невозможно при использовании матричного, кластерного или метода максимума<br />
правдоподобия.<br />
.<br />
(9)
9<br />
В программе СМО-КН для амплитудно-угломерного метода используется наглядное<br />
отображение функции правдоподобия, показывающей зону наиболее вероятного<br />
расположения источника. На рис. 4 показан пример отображения зоны расположения<br />
источника сразу после начала движения мобильной станции. Маршрут движения станции<br />
показан линией. По мере накопления данных зона вероятного расположения источника<br />
будет сужаться, его местоположение уточняться.<br />
Рисунок 3. Амплитудно-угломерный метод<br />
При использовании амплитудно-угломерного метода для оценки координат ИРИ, в<br />
отличие от матричного, кластерного и метода максимума правдоподобия, возможны<br />
маршруты движения по лучу непосредственно к ИРИ или от ИРИ. Таким образом,<br />
амплитудно-угломерный метод хорошо сочетается с движением автомобиля по методу<br />
привода, при этом на карте имея при этом наглядное отображение необходимого<br />
направления движения.<br />
Условия проведения испытаний<br />
Для проведения испытаний была использована мобильная станция радиомониторинга<br />
АРГУМЕНТ, оборудованная радиопеленгатором АРТИКУЛ-М с легкосъемной антенной<br />
системой, аппаратурой навигации АРК-КН1, панорамным измерительным приемником<br />
АРГАМАК-ИМ с активной антенной АРК-А7А , тремя ПЭВМ, объединенными локальной<br />
сетью [6]. На первой ПЭВМ было установлено программное обеспечение СМО-ППК
10<br />
версии 4.5.22, к ней был подключен радиопеленгатор и аппаратура навигации. На второй<br />
ПЭВМ было развернуто программное обеспечение картографии и навигации СМО-КН<br />
версии 1.18.8. На третьей ПЭВМ было установлено программное обеспечение СМО-ПАИ<br />
версии 4.5.18, и к ней подключен панорамный измерительный приемник.<br />
Для проведения испытаний использовано два маршрута, каждый длиной около 4 км, в<br />
городских и загородных условиях. Маршруты движения показаны на рис. 5, 6<br />
прерывистыми линиями. Черными прямоугольниками показаны городские кварталы,<br />
зеленым цветом – лесная зона. Место расположения ИРИ помечено белым крестиком.<br />
Начало маршрута – точка А − находилось на минимальном расстоянии от ИРИ.<br />
Мобильная станция двигалась по кольцу от точки А к точке К по часовой стрелке.<br />
Рис. 4. Маршрут в городской зоне<br />
Рис. 5. Маршрут в загородной зоне.<br />
В качестве ИРИ использовался маломощный тестовый генератор АРК-ТГ1 со штыревой<br />
антенной и выходной мощностью не более 30 мВт, запрограммированный для работы на<br />
двух радиолюбительских частотах f1= 145 МГц, f2 = 434 МГц. Вид излучения –<br />
непрерывный гармонический сигнал. В городской зоне ИРИ располагался на нижнем<br />
этаже многоэтажного здания, а в загородной зоне – непосредственно на земле.<br />
Для маршрута в городской зоне характерно наличие кварталов с многоэтажными<br />
зданиями. Практически на всем протяжении маршрута отсутствует прямая видимость<br />
(прямое прохождение радиоволны от ИРИ к мобильной станции). В то же время<br />
загородный маршрут проходит почти по открытому месту, имеются только несколько<br />
лесных полос, показанных на рис. 6 зеленым цветом.
11<br />
Для обоих маршрутов скорость движения автомобиля составляла не более 40 км/ч. Во<br />
время движения производилось пеленгование и измерение амплитуды сигнала ИРИ,<br />
измеренные значения пеленгов и амплитуды, а также координаты станции и ее курсовой<br />
угол сохранялись в базе данных.<br />
Результаты испытаний<br />
На рис. 7 показаны полученные зависимости амплитуды принимаемых сигналов на входе<br />
приемника (в децибелах по отношению к микровольту) от позиций на маршруте<br />
движения. Зависимости 1 и 2 получены для загородной зоны, 2 и 3 − для городской. При<br />
этом зависимости 1 и 3 соответствуют частоте 434 МГц, зависимости 2 и 4 – частоте 145<br />
МГц.<br />
Как видно из рис. 7, зависимости амплитуды принимаемого сигнала от позиции станции<br />
на маршруте движения имеют флуктуирующий характер относительно сравнительно<br />
медленно меняющегося среднего значения. Размах пульсаций в отдельных точках<br />
превышает 10 дБ. В начале маршрута – точке А, где мобильная станция находится от ИРИ<br />
на минимальном удалении, амплитуды сигналов за городом и в городе сравнимы по<br />
величине, однако далее, по мере движения станции по маршруту в городской зоне по<br />
сравнению с загородной наблюдается более сильное ослабление радиосигналов.<br />
Приведенные зависимости амплитуды сигнала от позиций станции вместе с координатами<br />
этих позиций являются исходным материалом для работы амплитудного метода<br />
<strong>местоопределения</strong> ИРИ.
12<br />
Рис. 6. Зависимости амплитуды радиосигнала от позиции станции на маршруте движения<br />
По результатам пеленгования были оценена вероятность ошибки пеленгования P ( δ
Вероятность<br />
1<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
1<br />
2<br />
13<br />
0<br />
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180<br />
Рис. 7. Вероятность ошибки пеленгования<br />
3<br />
4<br />
Ошибка, град<br />
Как видно из приведенных зависимостей, вероятность взятия пеленгов с ошибкой<br />
º<br />
меньшей 10P P в загородной зоне составляет около 0,2, в городской зоне − около 0,1, а<br />
º<br />
вероятность взятия пеленгов с ошибкой меньшей, 20P P в загородной зоне около 0,4, а<br />
городской − около 0,2. В городской зоне наблюдается ухудшение точности пеленгования<br />
на более высокой частоте. Можно предположить, что основное влияние на точность<br />
пеленгования оказывает интерференция радиоволн, вызванная их многолучевым<br />
распространением радиоволн, которая в условиях города из-за наличия большого числа<br />
различных неоднородностей, вызывающих отражение будет проявляться сильнее.<br />
Поэтому в загородных условиях вероятность ошибки оказывается меньше, чем в городе.<br />
Зависимости, приведенные на рис. 7, 8, подтверждают, что вычисление местоположения<br />
ИРИ одиночной мобильной станцией радиомониторинга является сложной задачей,<br />
требующей статистических <strong>методов</strong> решения.<br />
Перейдем к сравнению ошибок оценки местоположения ИРИ для рассматриваемых<br />
<strong>методов</strong>. Ошибки будем определять как решение обратной геодезической задачи, когда по<br />
известным географическим координатам двух точек требуется найти расстояние между<br />
ними. В качестве первой точки берем место расположения ИРИ, координаты которого<br />
известны, вторая точка − это расчетная точка местоположения ИРИ, координаты которой<br />
вычислены с помощью проверяемого метода. Отметим, что подобная проверка вряд ли<br />
является строгой, поскольку она проводится только для двух конкретных частот и двух
14<br />
конкретных маршрутов движения станции. Также здесь не учитываются погрешности<br />
навигационной аппаратуры при определении «истинных» координат ИРИ, координат и<br />
курсового угла мобильной станции. Тем не менее подобная проверка вполне способна<br />
дать представление о работоспособности сравниваемых <strong>методов</strong>.<br />
В табл. 1 приведены результаты значения ошибок определения местоположения ИРИ,<br />
выраженные в метрах, для полных маршрутов АBCDEFGHK в городе и загородной зоне.<br />
В левом столбце указаны названия <strong>методов</strong> вычисления координат. Далее в табл. 1<br />
приведены ошибки <strong>местоопределения</strong> для частот 146 МГц и 434 МГц. Сокращениями ВГ<br />
и ЗГ помечены столбцы для измерений в городе (ВГ) и за городом (ЗГ). В крайнем правом<br />
столбце указано среднее значение для ошибок по каждому методу. Значения ошибок<br />
округлены до 10 м.<br />
Таблица 1. Полученные значения ошибок <strong>местоопределения</strong><br />
Метод вычисления координат<br />
Частота ИРИ<br />
146 МГц 434 МГц<br />
ВГ ЗГ ВГ ЗГ<br />
Средняя<br />
ошибка<br />
Матричный 82 22 130 30 66<br />
Кластерный 40 30 50 60 45<br />
Максимума правдоподобия 90 60 50 40 60<br />
Амплитудный без учета рельефа 140 50 90 120 100<br />
Амплитудный с учетом рельефа 100 40 50 120 77,5<br />
Амплитудно-угломерный 20 40 70 60 47,5<br />
Среднее значение ошибки, меньшее 50 м, показали кластерный и амплитудно-угломерный<br />
методы, наибольшее среднее значение ошибки, равное 100 м, оказалось у амплитудного<br />
метода, не использующего сведений о рельефе местности. Учет рельефа в амплитудном<br />
методе вызвал уменьшении средней ошибки почти на одну треть. Среднее значение<br />
ошибки <strong>местоопределения</strong> в условиях города, вычисленное по данным табл. 1, составило<br />
76 м, а среднее значение ошибки в условиях загородной зоны − 56 м.<br />
Результаты, приведенные в табл. 1, подтверждают, что все рассмотренные методы как<br />
эвристические – матричный и кластерный, так и математически более строгие, как метод<br />
максимума правдоподобия, амплитудный и амплитудно-угломерный, показали<br />
приемлемые для практики точности <strong>местоопределения</strong> ИРИ. Поэтому для выбора<br />
предпочтительного метода, очевидно, следует принять во внимание дополнительные<br />
соображения.
15<br />
Для мобильной станции, оснащенной только измерительным приемником, для<br />
<strong>местоопределения</strong> ИРИ приходится использовать амплитудный метод. Этот метод дает<br />
приемлемую точность, если цифровая карта местности имеет слои со сведениями о<br />
рельефе местности, кварталах застройки, лесных массивах и т.д., поскольку<br />
использование подобных сведений повышает точность вычисления координат ИРИ.<br />
Для мобильной станции, оборудованной радиопеленгатором, применяются методы,<br />
основанные на обработке пеленгов, поскольку по сравнению с амплитудным методом, они<br />
имеют большую точность определения координат ИРИ. Эти методы способны вычислять<br />
местоположение <strong>источников</strong> с кратковременным излучением сигнала всего по нескольким<br />
измеренным пеленгам, кроме того, их важным достоинством является сохранение<br />
работоспособности при малых отношениях сигнал/шум. Однако матричный и кластерный<br />
методы, а также метод максимума правдоподобия применительно к одиночной мобильной<br />
станции имеют существенный недостаток − они не могут использоваться для вычисления<br />
местоположения ИРИ при движении станции непосредственно по направлению к<br />
источнику или от источника радиоизлучения. Амплитудно-угломерный метод свободен от<br />
этого недостатка, поскольку он обрабатывает как поступающие пеленги, так и<br />
информацию об уровнях сигнала. Дополнительный довод в пользу амплитудноугломерного<br />
метода состоит в том, что при его использовании на электронной карте<br />
СМО-КН уже в начале сеанса работы отображается зона вероятного расположения ИРИ,<br />
эта зона в процессе движения станции все более конкретизируется. Если необходимо<br />
быстрое перемещение станции в точку расположения ИРИ, оператор может выбирать<br />
кратчайший маршрут по методу привода, пользуясь изображением зоны расположения<br />
ИРИ на электронной карте. Таким образом, для одиночной станции радиомониторинга<br />
использование амплитудно-угломерного метода является наиболее целесообразным.<br />
Литература<br />
1. Ашихмин А.В., Козьмин В.А., Коровин А.Г., Рембовский А.М. Распределенные<br />
системы радиомониторинга и пеленгования. – Специальная техника, № 5, 2006, с.<br />
38 − 53.<br />
2. Ашихмин А.В., Жуков А.А., Козьмин В.А., Шадрин И.А. Локализация <strong>источников</strong><br />
радиоизлучения и измерение напряженности поля с помощью мобильной станции<br />
радиоконтроля. − Специальная техника. Специальный выпуск. М. 2003, с. 9 − 18.<br />
3. Глазнев А.А., Козьмин В.А., Литвинов Г.В., Шадрин И.А. Многостанционные<br />
системы радиоконтроля и определения местоположения <strong>источников</strong><br />
радиоизлучения. − Специальная техника. Специальный выпуск. М. 2002, с. 20 − 29.
16<br />
4. Ашихмин А.В., Козьмин В.А., Кочкин Д.Е., Чубов Е.А. Использование цифрового<br />
измерительного приемника «Аргамак-ИМ» для измерения напряженности поля в<br />
мобильных станциях радиомониторинга. – Специальная техника, № 3, 2006, с. 35 −<br />
44.<br />
5. Царьков, Н. М. Многоканальные радиолокационные измерители. − М. :Сов. радио,<br />
1980, − 190 с.<br />
6. Каталог 2007. ИРКОС. Технические средства радиомониторинга. Москва. ЗАО<br />
ИРКОС. 62 с.