313 - FGG-KM - Univerza v Ljubljani
313 - FGG-KM - Univerza v Ljubljani
313 - FGG-KM - Univerza v Ljubljani

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
296 3 Metoda pomikov<br />
SLIKA 3.16: Deformirana oblika paličja<br />
Togostna matrika konstrukcije (3.57) zaradi poševne podpore ni simetrična. S posebno operacijo, ki ji<br />
pravimo kondenzacija, lahko dosežemo, da bo matrika simetrična. Tokrat bomo kondenzacijo uporabili<br />
tako, da bomo izločili spremenljivke v 3 (ki je linearno odvisna od pomika u 3 ), R 3X in R 3Y .<br />
Sistem enačb (3.57)<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 354 −354 0 0 u 1 20<br />
354 −1354 −354 354 0 0<br />
v 1<br />
0<br />
354 −354 −1354 354 1 0<br />
u 3<br />
⎢−354 354 354 −354 0 1<br />
⎥ ⎢ v 3<br />
= −<br />
0<br />
⎥ ⎢ 0<br />
.<br />
⎥<br />
⎣ 0 0 0 0 0.866 0.5⎦<br />
⎣R 3X<br />
⎦ ⎣ 0 ⎦<br />
0 0 −0.5 0.866 0 0 R 3Y 0<br />
razdelimo na dva dela. Prve tri enačbe pripadajo tistim prostostnim stopnjam, ki jih želimo ohraniti [u a ],<br />
druge tri pa tistim, ki jih želimo izločiti [u b ]<br />
[ ] [ ] [ ]<br />
[Kaa ] [K ab ] [ua ] [Fa ]<br />
= . (3.58)<br />
[K ba ] [K bb ] [u b ] [F b ]<br />
Izpišimo drugo vrstico matrične enačbe (3.58)<br />
Iz enačbe (3.59) lahko izrazimo [u b ]<br />
[K ba ] [u a ] + [K bb ] [u b ] = [F b ]. (3.59)<br />
[u b ] = [K bb ] −1 (− [K ba ] [u a ] + [F b ]), (3.60)<br />
kjer smo z [K bb ] −1 označili inverzno matriko matrike [K bb ]. Sedaj vstavimo enačbo (3.60) v prvo vrstico<br />
enačbe (3.58) in dobimo<br />
[K aa ] [u a ] + [K ab ] [K bb ] −1 (− [K ba ])[u a ] + [F b ]) = [F a ] →<br />
([K aa ] − [K ab ] [K bb ] −1 [K ba ])[u a ] = [F a ] − [K ab ] [K bb ] −1 [F b ].<br />
(3.61)<br />
Simetrično matriko [K aa ]−[K ab ][K bb ] −1 [K ba ] imenujemo kondenzirana matrika in jo označimo s [ ¯K aa ]<br />
[ ¯K aa ] = [K aa ] − [K ab ][K bb ] −1 [K ba ].
3.1 Ravninsko paličje 297<br />
Desno stran sistema enačb (3.61) označimo s [ ¯F a ]:<br />
[ ¯F a ] = [F a ] − [K ab ] [K bb ] −1 [F b ].<br />
Enačbo konstrukcije sedaj zapišemo v kondenzirani obliki z enačbo<br />
Inverzna matrika [K bb ] −1 je<br />
[ ¯K aa ][u a ] = [ ¯F a ].<br />
⎡<br />
0 0 2 √ ⎤ ⎡<br />
⎤<br />
3/3<br />
[K bb ] −1 = ⎣− √ 3/3 2 √ 0 0 1.155<br />
3/3 707/3<br />
1 0 707 √ ⎦ = ⎣−0.577 1.155 235.7⎦ .<br />
3/3<br />
1 0 408.2<br />
Kondenzirana matrika [ ¯K aa ] pa je<br />
⎡<br />
⎤<br />
[ ¯K<br />
−354 354 354<br />
aa ] = ⎣ 354 −1354 −354⎦ −<br />
354 −354 −1354<br />
⎡<br />
⎤ ⎡<br />
⎤ ⎡<br />
⎤<br />
−354 0 0 0 0 1.155 −354 354 354<br />
− ⎣ 354 0 0⎦<br />
⎣−0.577 1.155 235.7⎦<br />
⎣ 0 0 0⎦ =<br />
354 1 0 1 0 408.2 0 0 0.5<br />
⎡<br />
⎤<br />
−354 354 149.6<br />
= ⎣ 354 −1354 −149.6⎦ .<br />
149.6 −149.6 −1063.2<br />
Ker je [F b ] enak nič, ostane desna stran nespremenjena<br />
Če sedaj rešimo simetrični sistem enačb<br />
⎡ ⎤<br />
[ ¯F<br />
20<br />
a ] = [F a ] = − ⎣ 0 ⎦ .<br />
0<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 149.6 u 1 20<br />
⎣ 354 −1354 −149.6⎦ − ⎣v 1<br />
⎦ = − ⎣ 0 ⎦ ,<br />
149.6 −149.6 −1063.2 u 3 0<br />
dobimo enake rešitve, kot prej, ko smo naznanke računali iz enačbe (3.57).<br />
Poševno drsno podporo lahko obravnavamo tudi tako, da jo modeliramo s poševno palico z zelo veliko<br />
osno togostjo (slika 3.17). Izberemo lahko dolžino palice 34 z l 3,4 = 1 m. Izberemo tudi, da je osna<br />
togost k 3,4 = 10 000 k 1,2 = 10 000 000.
298 3 Metoda pomikov<br />
SLIKA 3.17: Poševno podporo lahko računsko obravnavamo s palico zelo velike togosti<br />
Togostne matrike palic 12, 13 in 23 ostanejo nespremenjene. Dodatno pa moramo izračunati togostno<br />
matriko palice 34. Upoštevamo, da je cos α 3,4 = sin α p in cos β 3,4 = − cos α p ter dejstvo, da je osna<br />
togost k 3,4 zelo velika<br />
[<br />
sin 2 ] [ ]<br />
α<br />
[ K 3,4 ] = k p − sin α p cos α p 2500000 −4330130<br />
3,4<br />
− sin α p cos α p cos 2 =<br />
.<br />
α p −4330130 7500000<br />
Izračunati moramo še togostno matriko [ K 3,4 ], ki je v tem primeru nekoliko spremenjena<br />
[ ]<br />
−2.50135 4.33048<br />
[ K 3,4 ] = −[ K 3,1 ] − [ K 3,2 ] − [ K 3,4 ] =<br />
10 6 .<br />
4.33048 −7.50035<br />
Enačba konstrukcije ob upoštevanju robnih pogojev v vozliščih 2 in 4 je<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 354 −354 u 1 −20<br />
⎢ 354 −1354 −354 354<br />
⎥ ⎢v 1<br />
⎥<br />
⎣ 354 −354 −2501350 4330480⎦<br />
⎣u 3<br />
⎦ = ⎢ 0<br />
⎥<br />
⎣ 0 ⎦ .<br />
−354 354 4330480 −7500350 v 3 0<br />
Rešitev tega sistema enačb<br />
u 1 = 0.0801 m, v 1 = 0.0200 m, u 3 = 0.0085 m, v 3 = 0.0049 m,<br />
je povsem enaka, kot pri prejšnjem računu.<br />
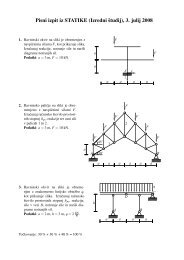
Primer 3.4 Paličje na sliki 3.18 je obteženo z vodoravno silo F = 20 MN. Elastični modul palic je<br />
E = 2 × 10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 . Določimo pomike vozlišč 1 in 4, reakcije v<br />
podporah 2, 3 in 5 ter sile v palicah! Dolžina a na sliki 3.18 je a = 2 m.
3.1 Ravninsko paličje 299<br />
SLIKA 3.18: Paličje sestavlja pet palic<br />
Stopnjo statične nedoločenosti za paličje s 5 palicami in 2 prostima vozliščema je<br />
n = 5 − 2 · 2 = 1<br />
Konstrukcija je enkrat statično nedoločena. Za vseh pet palic napišimo preglednico 3.4.<br />
PREGLEDNICA 3.4: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j<br />
1, 2 2 0 −1 1000<br />
1, 3 2 √ √ √<br />
2 2 / 2 − 2 / 2 707<br />
1, 4 2 1 0 1000<br />
4, 3 2 0 −1 1000<br />
4, 5 2 √ √ √<br />
2 2 / 2 − 2 / 2 707<br />
Togostne matrike posameznih palic smo že izračunali pri prejšnjih dveh nalogah, zato jih sedaj samo<br />
prepišemo<br />
[ ]<br />
[ ]<br />
[ ]<br />
0 0<br />
354 −354<br />
1000 0<br />
[ K 1,2 ] = [ K 4,3 ] = , [ K<br />
0 1000 1,3 ] = [ K 4,5 ] =<br />
, [ K<br />
−354 354 1,4 ] = .<br />
0 0<br />
Matrike [K i,i ] so<br />
[ ]<br />
−1354 354<br />
[K 1,1 ] = −([K 1,2 ] + [K 1,3 ] + [K 1,4 ]) =<br />
,<br />
354 −1354<br />
[ ] 0 0<br />
[K 2,2 ] = −[K 2,1 ] =<br />
,<br />
0 −1000<br />
[ ]<br />
−354 354<br />
[K 3,3 ] = −([K 3,1 ] + [K 3,4 ]) =<br />
,<br />
354 −1354<br />
[ ]<br />
−1354 354<br />
[K 4,4 ] = −([K 4,1 ] + [K 4,3 ] + [K 4,5 ]) =<br />
,<br />
354 −1354
300 3 Metoda pomikov<br />
[K 5,5 ] = −[K 5,4 ] =<br />
[ ]<br />
−354 354<br />
.<br />
354 −354<br />
Togostno matriko konstrukcije sestavimo iz podmatrik [K i,j ], tako kot kaže naslednja enačba<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1 F<br />
[K 1,1 ] [K 1,2 ] [K 1,3 ] [K 1,4 ] [ ∅ ]<br />
v 1<br />
0<br />
[K 2,1 ] [K 2,2 ] [ ∅ ] [ ∅ ] [ ∅ ]<br />
0<br />
R 2X<br />
0<br />
R 2Y<br />
[K 3,1 ] [ ∅ ] [K 3,3 ] [K 3,4 ] [ ∅ ]<br />
0<br />
0<br />
= −<br />
R 3X<br />
R 3Y<br />
, (3.62)<br />
⎢<br />
[K 4,1 ] [ ∅ ] [K 4,3 ] [K 4,4 ] [K 4,5 ]<br />
⎥<br />
u 4<br />
0<br />
⎣<br />
⎦<br />
⎢v 4 ⎥ ⎢ 0<br />
⎥<br />
[ ∅ ] [ ∅ ] [ ∅ ] [K 5,4 ] [K 5,5 ] ⎣ 0 ⎦ ⎣R ⎦ 5X<br />
0 R 5Y<br />
Ker so pomiki u 2 , v 2 , u 3 , v 3 , u 5 in v 5 enaki nič, lahko v enačbi konstrukcije (3.62) črtamo tretjo, četrto,<br />
peto, šesto, deveto in deseto vrstico in ustrezne stolpce<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−1354 354 1000 0 u 1 20<br />
⎢ 354 −1354 0 0<br />
⎥ ⎢v 1<br />
⎥<br />
⎣ 1000 0 −1354 354⎦<br />
⎣u 4<br />
⎦ = − ⎢ 0<br />
⎥<br />
⎣ 0 ⎦ .<br />
0 0 354 −1354 v 4 0<br />
Rešitev tega sistema enačb je<br />
u 1 = 0.0427 m, v 1 = 0.0112 m, u 4 = 0.0338 m, v 4 = 0.0088 m.<br />
Iz enačb, ki smo jih črtali, lahko izračunamo reakcije v podporah 2, 3 in 5<br />
⎡ ⎤ ⎡<br />
⎤<br />
⎡ ⎤<br />
R 2x<br />
0 0 0 0<br />
⎡ ⎤<br />
0.0<br />
R 2y<br />
0 1000 0 0<br />
0.0427<br />
−11.2<br />
R 3x<br />
⎢R 3y<br />
= −<br />
354 −354 0 0<br />
⎢0.0112<br />
⎥<br />
⎥ ⎢−354 354 0 1000<br />
⎣<br />
⎥ 0.0338⎦ = −11.2<br />
⎢ 2.4<br />
.<br />
⎥<br />
⎣R 5x<br />
⎦ ⎣ 0 0 354 −354⎦<br />
0.0088 ⎣ −8.9 ⎦<br />
R 5y 0 0 −354 354<br />
8.9<br />
Osne sile v palicah so<br />
N 1,2 = 1000 [ (0 − 0.0427) 0 + (0 − 0.0112) (−1) ] = 11.2 MN,<br />
N 1,3 = 707 [ (0 − 0.0427) 0.707 + (0 − 0.0112) (−0.707) ] = −15.7 MN,<br />
N 1,4 = 1000 [ (0.0338 − 0.0427) 1 + (0.0088 − 0.0112) 0 ] = −8.9 MN,<br />
N 4,3 = 1000 [ (0 − 0.0338) 0 + (0 − 0.0088) (−1) ] = 8.8 MN,<br />
N 4,5 = 707 [ (0 − 0.0338) 0.707 + (0 − 0.0088) (−0.707) ] = −12.5 MN<br />
Sile N 1,2 in N 4,3 so natezne, N 1,3 , N 1,4 in N 4,5 so tlačne. Pomiki vozlišča 1 so manjši kot pri prejšnjih<br />
primerih, saj so dodatne palice povečale togost konstrukcije. Na sliki 3.19 je prikazana deformirana<br />
oblika paličja.
3.1 Ravninsko paličje 301<br />
SLIKA 3.19: Deformirana oblika paličja<br />
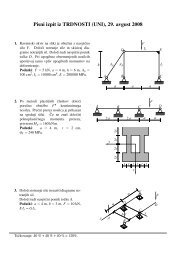
Primer 3.5 Palica 1 paličja na sliki 3.20 se segreje za 100 ◦ C. Elastični modul palic je E = 2·10 5 MPa,<br />
temperaturni razteznostni koeficient α T = 10 −5 ( ◦ C) −1 , ploščina prereza palic pa A = 0.01 m 2 .<br />
Določimo pomika vozlišča 1, reakcije v podporah 2 in 3 ter sile v palicah! Dolžina a na sliki 3.20<br />
je a = 2 m.<br />
SLIKA 3.20: Navpična palica se segreje za 100 ◦ C<br />
Konstrukcija je povsem enaka kot pri primeru 3.1. Zato je njena togostna matrika enaka<br />
[ ] [ ] [ ]<br />
−354 354 u1 ¯F1x<br />
= − .<br />
354 −1354 v 1<br />
¯F 1y<br />
Nadomestne sile izračunamo po enačbi (3.33)<br />
[ ] [ ] [ ¯F1X<br />
0 0<br />
= −E ¯F 1,2 A 1,2 α T 1,2 ∆T 1,2 = ,<br />
1Y −1 2]<br />
[ ] [ ] [ ¯F2X<br />
0 0<br />
= −E ¯F 2,1 A 2,1 α T 2,1 ∆T 2,1 =<br />
2Y 1 −2]<br />
Z rešitvijo sistema enačb [ ] [ ] [ −354 354 u1 0<br />
=<br />
354 −1354 v 1 −2]
302 3 Metoda pomikov<br />
izračunamo neznana pomika<br />
u 1 = 0.002 m, v 1 = 0.002 m.<br />
Reakcije izračunamo po enačbah (3.40)<br />
⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤<br />
R 2X<br />
0 0<br />
[ ]<br />
¯F 2X 0 0 0<br />
⎢R 2Y<br />
⎥<br />
⎣R 3X<br />
⎦ = − ⎢ 0 1000<br />
⎥ 0.002<br />
⎣ 354 −354⎦<br />
− ⎢<br />
¯F 2Y<br />
⎥<br />
0.002 ⎣ ¯F 3X<br />
⎦ = ⎢−2<br />
⎥<br />
⎣ 0 ⎦ − ⎢−2<br />
⎥<br />
⎣ 0 ⎦ = ⎢0<br />
⎥<br />
⎣0⎦ .<br />
R 3Y −354 354<br />
¯F 3Y 0 0 0<br />
Izračunati moramo še osne sile v palicah po enačbi (3.20)<br />
N 1,2 = 1000 [ (0 − 0.002) · 0 + (0 − 0.002) · (−1) ] − 2 · 10 5 · 0.01 · 10 −5 · 100 = 0,<br />
N 1,3 = 0.<br />
Obe osni sili sta enaki nič. Pri statično določeni konstrukciji enakomerne temperaturne spremembe<br />
povzročijo pomike, ne pa tudi reakcij in notranjih sil. Na sliki 3.21 je prikazana deformirana oblika<br />
paličja, prikazani pomiki so v primerjavi z dimenzijami konstrukcije povečani za 100-krat.<br />
SLIKA 3.21: Deformirana oblika paličja<br />
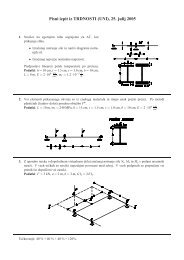
Primer 3.6 Palica 5 paličja na sliki 3.22 se segreje za 100 ◦ C. Elastični modul palic je E = 2·10 5 MPa,<br />
temperaturni razteznostni koeficient α T = 10 −5 ( ◦ C) −1 , ploščina prerezov palic pa A = 0.01 m 2 .<br />
Določimo pomike vozlišč 1 in 2, reakcije v podporah in sile v palicah! Dolžina a na sliki 3.22 je a = 2 m.<br />
Upoštevamo, da paličje sestavlja pet palic in sta dve vozlišči nepodprti<br />
Konstrukcija je enkrat statično nedoločena.<br />
n = 5 − 2 · 2 = 1.
3.1 Ravninsko paličje 303<br />
SLIKA 3.22: Statično nedoločeno paličje je obteženo le s temperaturno obtežbo<br />
Za vse palice napišimo preglednico 3.5.<br />
PREGLEDNICA 3.5: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j<br />
1, 3 2 0 −1 1000<br />
2, 4 2 0 −1 1000<br />
1, 2 2 1 0 1000<br />
1, 4 2 √ √ √<br />
2 2 / 2 − 2 / 2 707<br />
4, 5 2 √ 2 − √ 2 / 2 − √ 2 / 2 707<br />
Togostne matrike za posamezne palice so<br />
[ ]<br />
[ ]<br />
0 0<br />
1000 0<br />
[ K 1,3 ] = [ K 2,4 ] = , [ K<br />
0 1000<br />
1,2 ] = ,<br />
0 0<br />
[ ]<br />
[ ]<br />
354 −354<br />
354 354<br />
[ K 1,4 ] =<br />
, [ K<br />
−354 354<br />
2,3 ] =<br />
,<br />
354 354<br />
togostni matriki [K 1,1 ] in [K 2,2 ] sta<br />
[ ]<br />
−1354 354<br />
[K 1,1 ] = − ([K 1,3 ] + [K 1,2 ] + [K 1,4 ]) =<br />
,<br />
354 −1354<br />
[ ]<br />
−1354 −354<br />
[K 2,2 ] = − ([K 2,3 ] + [K 2,1 ] + [K 2,4 ]) =<br />
.<br />
−354 −1354<br />
Togostno matriko konstrukcije sestavimo iz podmatrik [K i,j ], tako, da za vozlišči 1 in 2 zapišemo enačbo
304 3 Metoda pomikov<br />
(3.32), za vozlišči 3 in 4 pa enačbo (3.40)<br />
⎡<br />
⎡<br />
⎤<br />
[K 1,1 ] [K 1,2 ] [K 1,3 ] [K 1,4 ]<br />
[K 2,1 ] [K 2,2 ] [K 2,3 ] [K 2,4 ]<br />
[K<br />
⎢ 3,1 ] [K 3,2 ] [ I ] [ ∅ ]<br />
⎥<br />
⎣<br />
⎦ ⎢<br />
[K 4,1 ] [K 4,2 ] [ ∅ ] [ I ] ⎣<br />
u 1<br />
v 1<br />
u 2<br />
v 2<br />
0<br />
0<br />
0<br />
0<br />
⎤ ⎡ ⎤<br />
¯F 1X<br />
¯F 1Y<br />
¯F 2X<br />
= −<br />
¯F 2Y<br />
R 3X + ¯F 3X<br />
.<br />
⎥ ⎢R 3Y + ¯F 3Y<br />
⎦ ⎣R 4X + ¯F<br />
⎥<br />
4X<br />
⎦<br />
R 4Y + ¯F 4Y<br />
Izračunati moramo nadomestne obtežbe. Segrevanje palice 5 vpliva le na obtežbo v vozliščih 2 in 3. Zato<br />
izračunamo (enačba (3.33))<br />
[ ]<br />
[ √ ] [√ ]<br />
¯F2X<br />
− 2/2<br />
= −E ¯F 2,3 A 2,3 α T 2,3 ∆T 2,3<br />
2Y − √ 2<br />
= √ ,<br />
2/2 2<br />
[ ]<br />
[√ ] [ √ ]<br />
¯F3X<br />
2/2<br />
= −E ¯F 3,2 A 3,2 α T 3,2 ∆T 3,2<br />
√ − 2<br />
=<br />
3Y 2/2 − √ .<br />
2<br />
Upoštevamo, da sta vozlišči 3 in 4 podprti. Zato lahko iz enačbe konstrukcije črtamo tretjo in četrto<br />
enačbo ter tretji in četrti stolpec. Iz enačbe konstrukcije<br />
izračunamo neznane pomike<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−1354 354 1000 0 u 1 0<br />
⎢ 354 −1354 0 0<br />
⎥ ⎢v 1<br />
⎥<br />
⎣ 1000 0 −1354 −354⎦<br />
⎣u 2<br />
⎦ = − ⎢<br />
0<br />
√ ⎥<br />
⎣ 2 ⎦ .<br />
√<br />
0 0 −354 −1354 v 2 2<br />
u 1 = 0.00177 m, v 1 = 0.00046 m, u 2 = 0.00223 m, v 2 = 0.00046 m.<br />
Iz enačb, ki smo jih črtali, izračunamo reakcije v podporah 3 in 4<br />
⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
R 3X<br />
0 0 354 354 0.00177<br />
⎢R 3Y<br />
⎥<br />
⎣R 4X<br />
⎦ = − ⎢ 0 1000 354 354<br />
⎥ ⎢0.00046<br />
⎥<br />
⎣ 354 −354 0 0⎦<br />
⎣0.00223⎦ −<br />
R 4Y −354 354 0 1000 0.00046<br />
⎡<br />
− √ ⎤ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤<br />
2<br />
− ⎢− √ −0.952 1.414 0.46<br />
2<br />
⎥<br />
⎣ 0 ⎦ = ⎢−1.414<br />
⎥<br />
⎣−0.462⎦ + ⎢1.414<br />
⎥<br />
⎣ 0 ⎦ = ⎢ 0.00<br />
⎥<br />
⎣−0.46⎦ MN.<br />
0 0.000 0 0.00
3.1 Ravninsko paličje 305<br />
Osne sile so<br />
N 1,3 = 1000 [ (0 − 0.00177) 0 + (0 − 0.00046)(−1) ] = 0.46 MN,<br />
N 2,4 = 1000 [ (0 − 0.00223) 0 + (0 − 0.00046)(−1) ] = 0.46 MN,<br />
N 1,2 = 1000 [ (0.00223 − 0.00177) 1 + (0.00046 − 0.00046) 0 ] = 0.46 MN,<br />
N 1,4 = 707 [ (0 − 0.00177) 0.707 + (0 − 0.00046) (−0.707) ] = −0.65 MN,<br />
N 2,3 = 707 [ (0 − 0.00223) (−0.707) + (0 − 0.00046) (−0.707) ] − 2 · 10 5 · 0.01 · 10 −5 · 100 =<br />
= −0.65 MN.<br />
Sile N 1,3 , N 2,4 in N 1,2 so natezne, sili N 1,4 in N 2,3 pa sta tlačni. Pri statično nedoločeni konstrukciji<br />
je temperaturna obtežba povzročila pomike ter notranje sile in reakcije. Na sliki 3.23 je prikazana<br />
deformirana oblika paličja.<br />
SLIKA 3.23: Deformirana oblika paličja<br />
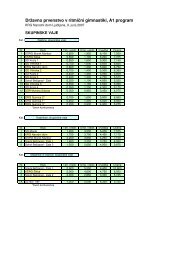
Primer 3.7 Izračunajmo pomike prostih vozlišč, reakcije v podporah in sile v palicah za prikazano<br />
paličje na sliki 3.24! Elastični modul palic je E = 2×10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 .<br />
Velikost sile P = 2 m, pomik vozlišča 2 pa ∆v 2 = −0.002 m.<br />
SLIKA 3.24: Vozlišče 2 se premakne v navpični smeri za 2 mm
306 3 Metoda pomikov<br />
Vozlišči 4 in 5 sta obteženi z enakima navpičnima silama F . Zaradi podajnosti podlage je navpični pomik<br />
v točki 2 različen od nič ∆v 2 = −0.002 m.<br />
Zapišimo preglednico s podatki o posameznih palicah.<br />
PREGLEDNICA 3.6: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j<br />
1, 4 5 0.6 0.8 400<br />
1, 2 6 1.0 0.0 333<br />
4, 5 6 1.0 0.0 333<br />
4, 2 5 0.6 −0.8 400<br />
2, 5 5 0.6 0.8 400<br />
2, 3 6 1.0 0.0 333<br />
5, 3 5 0.6 −0.8 400<br />
Togostne matrike posameznih palic izračunamo po enačbah (3.27) in (3.34)<br />
[ ] [ ]<br />
0.36 0.48 144 192<br />
[ K 1,4 ] = 400<br />
=<br />
,<br />
0.48 0.64 192 256<br />
[ ] [ ]<br />
1 0 333 0<br />
[ K 1,2 ] = 333 = ,<br />
0 0 0 0<br />
[ ] [ ]<br />
1 0 333 0<br />
[ K 4,5 ] = 333 = ,<br />
0 0 0 0<br />
[ ] [ ]<br />
0.36 −0.48 144 −192<br />
[ K 4,2 ] = 400<br />
=<br />
,<br />
−0.48 0.64 −192 256<br />
[ ] [ ]<br />
0.36 0.48 144 192<br />
[ K 2,5 ] = 400<br />
=<br />
,<br />
0.48 0.64 192 256<br />
[ ] [ ]<br />
1 0 333 0<br />
[ K 2,3 ] = 333 = ,<br />
0 0 0 0<br />
[ ] [ ]<br />
0.36 −0.48 144 −192<br />
[ K 5,3 ] = 400<br />
=<br />
,<br />
−0.48 0.64 −192 256<br />
[ ]<br />
−477 −192<br />
[K 1,1 ] = −([K 1,2 ] + [K 1,4 ]) =<br />
,<br />
−192 −256<br />
[K 2,2 ] = −([K 2,1 ] + [K 2,4 ] + [K 2,5 ] + [K 2,3 ]) =<br />
[K 3,3 ] = −([K 3,2 ] + [K 3,5 ]) =<br />
[ ]<br />
−477 192<br />
,<br />
192 −256<br />
[ ]<br />
−954.7 0<br />
,<br />
0 −512
3.1 Ravninsko paličje 307<br />
[ ]<br />
−621 0<br />
[K 4,4 ] = −([K 4,1 ] + [K 4,2 ] + [K 4,5 ]) =<br />
,<br />
0 −512<br />
[ ]<br />
−621 0<br />
[K 5,5 ] = −([K 5,4 ] + [K 5,2 ] + [K 5,3 ]) =<br />
.<br />
0 −512<br />
Togostno matriko konstrukcije sestavimo iz podmatrik [K i,j ]<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1 R 1X<br />
[K 1,1 ] [K 1,2 ] [ ∅ ] [K 1,4 ] [ ∅ ]<br />
v 1<br />
R 1Y<br />
[K 2,1 ] [K 2,2 ] [K 2,3 ] [K 2,4 ] [K 2,4 ]<br />
u 2<br />
0<br />
v 2<br />
R 2Y<br />
[ ∅ ] [K 3,2 ] [K 3,3 ] [ ∅ ] [K 3,5 ]<br />
u 3<br />
v 3<br />
= −<br />
0<br />
R 3Y<br />
⎢<br />
[K 4,1 ] [K 4,2 ] [ ∅ ] [K 4,4 ] [K 4,5 ]<br />
⎥<br />
u 4<br />
0<br />
⎣<br />
⎦<br />
⎢v 4 ⎥ ⎢ −F<br />
⎥<br />
[ ∅ ] [K 5,2 ] [K 5,3 ] [K 5,4 ] [K 5,5 ] ⎣u ⎦ ⎣<br />
5 0 ⎦<br />
v 5 −F<br />
(3.63)<br />
in jo izrazimo s togostnimi koeficienti<br />
⎡<br />
⎤⎡<br />
⎤ ⎡<br />
−477 −192 333 0 0 0 144 −192 0 0 u 1<br />
−192 −256 0 0 0 0 192 256 0 0<br />
v 1<br />
333 0 −955 0 333 0 144 −192 144 192<br />
u 2<br />
0 0 0 −512 0 0 −192 256 192 256<br />
v 2<br />
0 0 333 0 −477 192 0 0 144 −192<br />
u 3<br />
0 0 0 0 192 −256 0 0 −192 256<br />
v 3<br />
=<br />
144 192 144 −192 0 0 −621 0 333 0<br />
u 4<br />
⎢ 192 256 −192 256 0 0 0 −512 0 0<br />
⎥⎢v 4 ⎥ ⎢<br />
⎣ 0 0 144 192 144 −192 333 0 −621 0⎦⎣u ⎦ ⎣ 5<br />
0 0 192 256 −192 256 0 0 0 −512 v 5<br />
Ob upoštevanju podpor v vozliščih 1 in 3 je enačba konstrukcije taka:<br />
⎡<br />
⎤ ⎡ ⎤ ⎡<br />
−954.7 0 333.3 144 −192 144 192 u 2<br />
0 −512 0 −192 256 192 256<br />
v 2<br />
333.3 0 −477.3 0 0 144 −192<br />
u 3<br />
144 −192 0 −621.3 0 333.3 0<br />
u 4<br />
= −<br />
⎢ −192 256 0 0 −512 0 0<br />
⎥ ⎢v 4<br />
⎥ ⎢<br />
⎣ 144 192 144 333.3 0 −621.3 0⎦<br />
⎣u 5<br />
⎦ ⎣<br />
192 256 −192 0 0 0 −512 v 5<br />
−R 1X<br />
−R 1Y<br />
0<br />
−R 2Y<br />
0<br />
−R 3Y<br />
0<br />
R 2Y<br />
0<br />
0<br />
−F<br />
0<br />
−F<br />
0<br />
F<br />
0<br />
F<br />
⎤<br />
⎤<br />
. (3.64)<br />
⎥<br />
⎦<br />
. (3.65)<br />
⎥<br />
⎦
308 3 Metoda pomikov<br />
Sedaj upoštevamo še, da je pomik v vozlišču 2 predpisan: v 2 = ∆v 2 in iz (3.65) dobimo<br />
⎡<br />
⎤ ⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
−954.7 333.3 144 −192 144 192 u 2<br />
0<br />
0<br />
333.3 −477.3 0 0 144 −192<br />
u 3<br />
0<br />
0<br />
144 0 −621.3 0 333.3 0<br />
u 4<br />
⎢ −192 0 0 −512 0 0<br />
⎥ ⎢v 4<br />
=<br />
0 + 192 ∆v 2<br />
⎥ ⎢F − 256 ∆v 2<br />
=<br />
−0.384<br />
⎥ ⎢ 2.512<br />
. (3.66)<br />
⎥<br />
⎣ 144 144 333.3 0 −621.3 0⎦<br />
⎣u 5<br />
⎦ ⎣ 0 − 192 ∆v 2<br />
⎦ ⎣ 0.384⎦<br />
192 −192 0 0 0 −512 v 5 F − 256 ∆v 2 2.512<br />
Rešitve sistema enačb (3.66) so:<br />
u 2 = 0.002305 m, u 3 = 0.004609 m,<br />
u 4 = 0.002359 m, v 4 = −0.005770 m,<br />
u 5 = 0.002250 m, v 5 = −0.005770 m.<br />
Reakcije izračunamo po enačbah (3.40) (glej (3.64))<br />
− R 1X = 333 u 2 + 144 u 4 + 192 v 4 → R 1X = 0 MN,<br />
− R 1Y = 192 u 4 + 256 v 4 → R 1Y = 1.024 MN,<br />
− R 2Y = −512 v 2 − 192 u 4 + 256 v 4 + 192 u 5 + 256 v 5 → R 2Y = 1.951 MN,<br />
− R 3Y = 192 u 3 − 192 u 5 + 256 v 5 → R 3Y = 1.024 MN.<br />
Osne sile v palicah izračunamo iz pomikov vozlišč po enačbi (3.20):<br />
N 1,2 = 333 [ (u 2 − u 1 ) 1 ] = 0.7682 MN,<br />
N 1,4 = 400 [ (u 4 − u 1 ) 0.6 + (v 4 − v 1 ) 0.8 ] = −1.2803 MN,<br />
N 4,2 = 400 [ (u 4 − u 2 ) 0.6 + (v 4 − v 2 ) (−0.8) ] = −1.2197 MN,<br />
N 4,5 = 333 [ (u 5 − u 4 ) 1 ] = −0.0364 MN,<br />
N 2,5 = 400 [ (u 5 − u 2 ) 0.6 + (v 5 − v 2 ) 0.8 ] = −1.2197 MN,<br />
N 2,3 = 333 [ (u 3 − u 2 ) 1 ] = 0.7682 MN,<br />
N 5,3 = 400 [ (u 5 − u 3 ) 0.6 + (v 5 − v 3 ) (−0.8) ] = −1.2803 MN,<br />
Na sliki 3.25 je prikazana deformirana oblika paličja.
3.1 Ravninsko paličje 309<br />
SLIKA 3.25: Deformirana oblika paličja<br />
Primer 3.8 Izračunajmo pomike prostih vozlišč, reakcije v podporah in sile v palicah za prikazano<br />
paličje (slika 3.26)! Elastični modul palic je E = 2 × 10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 .<br />
Velikost sile F je 2 MN, pomik vozlišča 2 pa ∆⃗u 2 = 0.002 ⃗e x − 0.004 ⃗e y m.<br />
SLIKA 3.26: Vozlišče 2 se premakne v poševni smeri<br />
V vozlišču 2 je predpisan pomik v vodoravni in navpični smeri. Vozlišči 1 in 3 sta nepomično podprti.<br />
Sistem enačb za konstrukcijo, pri kateri smo že upoštevali robne pogoje v vozliščih 1 in 3, je<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−954.7 0 144 −192 144 192 u 2 R 2X<br />
0 −512 −192 256 192 256<br />
v 2<br />
R 2Y<br />
144 −192 −621.3 0 333.3 0<br />
u 4<br />
⎢ −192 256 0 −512 0 0<br />
⎥ ⎢v 4<br />
= −<br />
0<br />
⎥ ⎢ −F<br />
.<br />
⎥<br />
⎣ 144 192 333.3 0 −621.3 0⎦<br />
⎣u 5<br />
⎦ ⎣ 0 ⎦<br />
192 256 0 0 0 −512 v 5 −F<br />
Upoštevamo še predpisani pomik v vozlišču 2: u 2 = 0.002 in v 2 = −0.004:
310 3 Metoda pomikov<br />
⎡<br />
⎤ ⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤<br />
−621.3 0 333.3 0 u 4 0 − 144 u 2 + 192 v 2 −1.056<br />
⎢ 0 −512 0 0<br />
⎥ ⎢v 4<br />
⎥<br />
⎣ 333.3 0 −621.3 0⎦<br />
⎣u 5<br />
⎦ = − ⎢F + 192 u 2 − 256 v 2<br />
⎥<br />
⎣ 0 − 144 u 2 − 192 v 2<br />
⎦ = ⎢ 3.408<br />
⎥<br />
⎣ 0.480⎦ .<br />
0 0 0 −512 v 5 F − 192 u 2 − 256 v 2 2.640<br />
Rešitve sistema enačb so:<br />
u 4 = 0.001804 m, v 4 = −0.006656 m, u 5 = 0.0001955 m, v 5 = −0.005156 m.<br />
Reakcije izračunamo po enačbah<br />
− R 1X = 333 u 2 + 144 u 4 + 192 v 4 → R 1X = 0.3515 MN,<br />
− R 1Y = 192 u 4 + 256 v 4 → R 1Y = 1.3575 MN,<br />
− R 2X = −954.7 u 2 + 144 u 4 − 192 v 4 + 144 u 5 + 192 v 5 → R 2X = 1.3333 MN,<br />
− R 2Y = −512 v 2 − 192 u 4 + 256 v 4 + 192 u 5 + 256 v 5 → R 2Y = 1.2844 MN,<br />
− R 3X = 333.3 u 2 + 144 u 5 − 192 v 5 → R 3X = −1.6848 MN,<br />
− R 3Y = −192 u 5 + 256 v 5 → R 3Y = 1.3575 MN.<br />
Osne sile v palicah so:<br />
N 1,2 = 333 [ (u 2 − u 1 ) 1 ] = 0.6666 MN,<br />
N 1,4 = 400 [ (u 4 − u 1 ) 0.6 + (v 4 − v 1 ) 0.8 ] = −1.6969 MN,<br />
N 4,2 = 400 [ (u 4 − u 2 ) 0.6 + (v 4 − v 2 ) (−0.8) ] = −0.8031 MN,<br />
N 4,5 = 333 [ (u 5 − u 4 ) 1 ] = −0.5363 MN,<br />
N 2,5 = 400 [ (u 5 − u 2 ) 0.6 + (v 5 − v 2 ) 0.8 ] = −0.8031 MN,<br />
N 2,3 = 333 [ (u 3 − u 2 ) 1 ] = −0.6667 MN,<br />
N 5,3 = 400 [ (u 5 − u 3 ) 0.6 + (v 5 − v 3 ) (−0.8) ] = −1.6969 MN.<br />
Na sliki 3.27 je prikazana deformirana oblika paličja.<br />
SLIKA 3.27: Deformirana oblika paličja
3.1 Ravninsko paličje 311<br />
Primer 3.9 Določimo osne sile v palicah 12, 13 in 14 (slika 3.28)! Podajnost nosilca AB je v primerjavi<br />
s podajnostjo palic zanemarljiva. Dolžina a = 2 m, ploščina prečnega prereza palic A p = 5 cm 2 , modul<br />
elastičnosti materiala palic E = 21000 kN/cm 2 , velikost linijske obtežbe pa P z = 80 kN/m.<br />
SLIKA 3.28: Geometrijski podatki o konstrukciji<br />
Nalogo rešimo tako, da nosilec ločimo od paličja. Prekinjeno zvezo med paličjem in nosilcem nadomestimo<br />
s silama B x in B y v vozlišču B ≡ 1 (slika 3.29).<br />
SLIKA 3.29: Zvezo med paličjem in nosilcem nadomestimo s silama B x in B y v vozlišču B<br />
Izračunati moramo pomika u 1 = u B in v 1 = v B vozlišča B, zasuk ϕ nosilca AB ter sili B x in B y . Pet<br />
neznank določimo tako, da za nosilec zapišemo momentni pogoj na točko 0 ter kinematični enačbi, s<br />
katerima izrazimo pomika u B in v B z zasukom ϕ, za paličje pa ravnotežni enačbi za vozlišče B.<br />
Nosilec<br />
Ravnotežna enačba:<br />
B x<br />
3 a<br />
4 + B y a − P z<br />
a 2<br />
2 = 0 → 3 B x + 4 B y = 2 P z a. (3.67)
Kinematični pogoj zapišemo z enačbo † ⃗u B = ⃗u 0 + ⃗ϕ × ⃗r B .<br />
312 3 Metoda pomikov<br />
Upoštevamo, da je ⃗u 0 = ⃗0, ⃗ϕ = ϕ ⃗e z , ⃗r B = a ⃗e x − (3 a/4) ⃗e y in dobimo<br />
⃗u B = 3 a<br />
4 ϕ ⃗e x + a ϕ ⃗e y → u B = u 1 = 3 a<br />
4 ϕ, v B = v 1 = a ϕ. (3.68)<br />
Paličje<br />
PREGLEDNICA 3.7: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j [kN/cm]<br />
1, 2 200 −1.0 0.0 525<br />
1, 3 200 1.0 0.0 525<br />
1, 4 250 0.8 0.6 420<br />
Togostni matriki za palici 12 in 13 sta pri prejšnji nalogi<br />
[ ] 525 0<br />
[ K 1,2 ] = [ K 1,3 ] = , [ K<br />
0 0<br />
1,4 ] =<br />
matrika [ K 1,1 ] pa je<br />
Ravnotežno enačbo za vozlišče B<br />
zapišemo takole:<br />
[ K 1,1 ] = −([ K 1,2 ] + [ K 1,3 ] + [ K 1,4 ]) =<br />
Rešitev enačb (3.67), (3.68) in (3.69) je<br />
[ ] [ ] [<br />
u1 −Bx 0<br />
[ K 1,1 ] + = .<br />
v 1 −B y 0]<br />
−1318.8 u 1 − 201.6 v 1 = B x ,<br />
−201.6 u 1 − 151.2 v 1 = B y .<br />
[ ]<br />
268.8 201.6<br />
,<br />
201.6 151.2<br />
[ ]<br />
−1318.8 −201.6<br />
.<br />
−201.6 −151.2<br />
(3.69)<br />
u 1 = −0.0502 cm, u 1 = −0.0670 cm, ϕ = −0.000335 rad, B x = 79.68 kN, B y = 20.24 kN.<br />
Določimo še osne sile v palicah (enačba (3.20))<br />
N 1,2 = 525 ( 0.050 · (−1) + 0.067 · 0 ) = −26.35 kN,<br />
N 1,3 = 525 ( 0.050 · 1 + 0.067 · 0 ) = 26.35 kN,<br />
N 1,4 = 420 ( 0.050 · 0.8 + 0.067 · 0.6 ) = 33.73 kN.<br />
† M. Stanek, G. Turk, Statika I, <strong>Univerza</strong> v <strong>Ljubljani</strong>, 1996.
3.2 Ravninski okvir <strong>313</strong><br />
3.2 Ravninski okvir<br />
V tem razdelku izpeljemo enačbe za računanje pomikov vozlišč in reakcij ravninskih okvirjev ter notranjih<br />
sil v elementih takih okvirjev. Pri tem upoštevamo, da so pomiki majhni in da so tlačne osne<br />
sile manjše od uklonskih sil. Zato lahko pišemo ravnotežne enačbe na nedeformirani legi konstrukcije.<br />
Okvirje obravnavamo po metodi pomikov (deformacijska metoda). To pomeni, da osnovne enačbe<br />
teorije elastičnosti izrazimo s pomiki.<br />
3.2.1 Osnovne predpostavke<br />
Posamezni elementi ravninskega okvirja potekajo od začetnega vozlišča i do končnega vozlišča j. Elementi<br />
imajo ravno os in konstanten prečni prerez. Predpostavimo, da leži glavna vztrajnostna os prečnega<br />
prereza vsakega elementa v ravnini konstrukcije, strižno središče pa se ujema s težiščem prečnega prereza.<br />
Ker vsa obtežba deluje v ravnini konstrukcije, so od nič različni le pomiki v tej ravnini.<br />
3.2.2 Opis oznak in koordinatnih sistemov<br />
Uporabimo dva desnosučna koordinatna sistema. Osi lokalnega koordinatnega sistema x, y in z izberemo<br />
tako, da os x sovpada z osjo vsakega elementa in kaže od vozlišča i proti vozlišču j, os y pa leži v ravnini<br />
konstrukcije. Osi y in z sta glavni vztrajnostni osi prečnega prereza elementa. Notranje sile v elementih<br />
okvirja računamo glede na osi lokalnega koordinatnega sistema. Osi globalnega koordinatnega sistema<br />
označimo z X, Y in Z. Geometrijo konstrukcije opišemo v ravnini X, Y , os Z pa ima enako smer kot os<br />
z (slika 3.30). Glede na osi globalnega koordinatnega sistema podajamo koordinate vozlišč, vozliščno<br />
obtežbo ter računamo reakcije in pomike vozlišč.<br />
SLIKA 3.30: Globalni in lokalni koordinatni sistem<br />
Pri ravninski okvirni konstrukciji ima vsako vozlišče elementa po tri prostostne stopnje gibanja. Vozliščne<br />
pomike v krajišču i označimo z [u i ], v krajišču j pa z [u j ] (slika 3.31a):<br />
⎡ ⎤ ⎡ ⎤<br />
u ix<br />
u jx<br />
[u i ] = ⎣u iy<br />
⎦ , [u j ] = ⎣u jy<br />
⎦ . (3.70)<br />
ϕ iz ϕ jz<br />
Vsaki prostostni stopnji v vozlišču pripada komponenta (posplošene) vozliščne sile. Vozliščne sile ele-
314 3 Metoda pomikov<br />
menta v krajišču i označimo z [n i ], v krajišču j pa z [n j ] (slika 3.31b):<br />
⎡ ⎤ ⎡ ⎤<br />
n ix<br />
n jx<br />
[n i ] = ⎣ n iy<br />
⎦ , [n j ] = ⎣ n jy<br />
⎦ . (3.71)<br />
m iz m jz<br />
SLIKA 3.31: a) Vozliščni pomiki<br />
b) Vozliščne sile<br />
Vidimo, da so vozliščne sile v vozlišču i enake negativnim vrednostim notranjih sil, v vozlišču j pa enake<br />
notranjim silam. Vozliščne pomike in vozliščne sile glede na lokalni koordinatni sistem označujemo z<br />
malimi črkami (enačbi (3.70) in (3.71)), glede na globalni koordinatni sistem pa z velikimi črkami:<br />
⎡ ⎤<br />
⎡ ⎤<br />
U iX<br />
U jX<br />
[U i ] = ⎣U iY<br />
⎦ , [U j ] = ⎣U jY<br />
⎦ . (3.72)<br />
Φ iZ Φ jZ<br />
oziroma<br />
⎡ ⎤ ⎡ ⎤<br />
N iX<br />
N jX<br />
[N i ] = ⎣N iY<br />
⎦ , [N j ] = ⎣N jY<br />
⎦ (3.73)<br />
M iZ M jZ<br />
Na sliki 3.32 prikazujemo ravninski okvir, globalni in lokalne koordinatne sisteme ter številke vozlišč<br />
konstrukcije. Vsak element je podan s številkama začetnega in končnega vozlišča. Za element, ki ga<br />
določata vozlišči 2 in 4, smo izbrali lokalno os x od vozlišča 2 proti vozlišču 4. Zato je številka i<br />
začetnega vozlišče tega elementa 2, številka j končnega vozlišča pa 4. Običajno vsak element označimo<br />
še s številko elementa e. Element z vozliščema 2 in 4 na sliki 3.32 ima številko 4.
3.2 Ravninski okvir 315<br />
SLIKA 3.32: Posamezne elemente okvirja določajo številke vozlišč oziroma številke elementov<br />
3.2.3 Togostna matrika elementa v lokalnem koordinatnem sistemu<br />
Določimo togostno matriko [ k ] linijskega elementa s konstantnim prečnim prerezom in z ravno osjo za<br />
primer ravninske konstrukcije v ravnini x, y.<br />
Togostna matrika [ k ] linijskega elementa je definirana z enačbo<br />
[ ] [ ]<br />
[ni ] [ui ]<br />
= [ k ]<br />
[n j ] [u j ]<br />
oziroma [n] = [ k ][u]. (3.74)<br />
Koeficiente togostne matrike [ k ] določimo z integracijo ravnotežnih enačb (1.87)<br />
d 2 u<br />
dx 2 = − P x<br />
E A x<br />
,<br />
d 4 v<br />
dx 4 = 1 (<br />
P y − dM )<br />
z<br />
. (3.75)<br />
E I z dx<br />
Določiti želimo zvezo med silama n ix in n jx ter pomikoma u ix in u jx za linijski element na sliki 3.33.<br />
SLIKA 3.33: Vozliščni sili n ix in n iy ter vozliščna pomika u ix in u jx<br />
Iskano zvezo dobimo, če rešimo prvo izmed diferencialno enačbo (3.75)<br />
d 2 u x<br />
dx 2 = 0 (3.76)
316 3 Metoda pomikov<br />
ob upoštevanju robnih pogojev<br />
Enačbo (3.76) dvakrat integriramo<br />
x = 0 : u x (0) = u ix , x = L : u x (L) = u jx . (3.77)<br />
du x<br />
dx = C 1, u x = C 1 x + C 2 (3.78)<br />
in upoštevamo robna pogoja (3.77). Tako dobimo izraza za integracijski konstanti C 1 in C 2<br />
ter izraz za pomik u x<br />
Upoštevamo enačbo (glej (1.80))<br />
ter prvi izmed enačb (3.78) in (3.79) in dobimo<br />
du x<br />
dx = u jx − u ix<br />
L<br />
C 1 = u jx − u ix<br />
, C 2 = u ix (3.79)<br />
L<br />
u x = u jx − u ix<br />
L<br />
du x<br />
dx =<br />
x + u ix . (3.80)<br />
N x<br />
E A x<br />
(3.81)<br />
= N x<br />
E A x<br />
→ N x = E A x<br />
L (u jx − u ix ). (3.82)<br />
Velikost osne sile N x se vzdolž osi elementa ne spreminja. Iz ravnotežnih pogojev za del elementa ob<br />
vozliščih sledi (slika 3.34).<br />
N x (+0) = −n ix , N x (L − 0) = n jx . (3.83)<br />
SLIKA 3.34: Zvezo med notranjimi silami pri x = +0 in x = L − 0 ter vozliščnimi silami dobimo<br />
iz ravnotežnih enačb za del elementa ob vozliščih<br />
Enačbi (3.83) vstavimo v (3.82) in dobimo iskani zvezi<br />
n ix = E A x<br />
L (u ix − u jx ), n jx = − E A x<br />
L (u ix − u jx ). (3.84)<br />
Določiti moramo še zvezo med silama n iy , n jy in momentoma m iz , m jz ter pomikoma u iy , u jy in<br />
zasukoma ϕ iz , ϕ jz za linijski element na sliki 3.35.
3.2 Ravninski okvir 317<br />
SLIKA 3.35: Vozliščni sili n iy in n jy , vozliščna momenta m iz in m jz ter vozliščna pomika u iy ,<br />
u jy in zasuka ϕ iz in ϕ jz<br />
Iskano zvezo dobimo, če integriramo drugo izmed enačbo (3.75)<br />
in upoštevamo robne pogoje<br />
x = 0 : u y (0) = u iy ,<br />
du y<br />
dx<br />
Enačbo (3.85) štirikrat integriramo<br />
d 4 u y<br />
dx 4 = 0 (3.85)<br />
∣ = ϕ iz , x = L : u y (L) = u jy ,<br />
x=0<br />
d 3 u y<br />
dx 3 = C 1,<br />
d 2 u y<br />
dx 2 = C 1 x + C 2 ,<br />
du y<br />
dx = C 1<br />
u y = C 1<br />
x 3<br />
x 2<br />
2 + C 2 x + C 3 ,<br />
6 + C 2<br />
du y<br />
dx<br />
∣ = ϕ jz . (3.86)<br />
x=L<br />
x 2<br />
2 + C 3 x + C 4<br />
(3.87)<br />
in upoštevamo robne pogoje (3.86). Tako dobimo izraze za integracijske konstante C 1 do C 4<br />
C 1 = 12<br />
L 3 u iy − 12<br />
L 3 u jy + 6 L 2 ϕ iz + 6 L 2 ϕ jz,<br />
C 2 = − 6 L 2 u iy + 6 L 2 u jy − 4 L ϕ iz − 2 L ϕ jz,<br />
C 3 = ϕ iz ,<br />
C 4 = u iy .<br />
(3.88)<br />
Konstante (3.88) vstavimo v četrto izmed enačb (3.87) in dobimo izraz za pomik u y<br />
( 2<br />
u y =<br />
L 3 u iy − 2 L 3 u jy + 1 L 2 ϕ iz + 1 )<br />
L 2 ϕ jz x 3 +<br />
(<br />
+ − 3 L 2 u iy + 3 L 2 u jy − 2 L ϕ iz − 2 )<br />
L ϕ jz x 2 + ϕ iz x + u iy .<br />
(3.89)
318 3 Metoda pomikov<br />
Iz ravnotežnih pogojev za del elementa ob vozliščih sledi (slika 3.34)<br />
N y (+0) = −n iy , N y (L − 0) = n jy , M z (+0) = −m iz , M z (L − 0) = m jz . (3.90)<br />
Drugi dve izmed enačb (3.90) upoštevamo v enačbi (glej (1.81))<br />
d 2 u y<br />
dx 2<br />
= M z<br />
E I z<br />
in dobimo<br />
m iz = −E I z<br />
d 2 u y<br />
dx 2 ∣<br />
∣∣∣x=0<br />
,<br />
m jz = E I z<br />
d 2 u y<br />
dx 2 ∣<br />
∣∣∣x=L<br />
. (3.91)<br />
Izraz (3.89) vstavimo v (3.91) in dobimo zvezo med m iz , m jz ter u iy , u jy , ϕ iz in ϕ jz<br />
m iz = 6 E I z<br />
L 2<br />
m jz = 6 E I z<br />
L 2<br />
u iy − 6 E I z<br />
L 2<br />
u iy − 6 E I z<br />
L 2<br />
u jy + 4 E I z<br />
L<br />
u jy + 2 E I z<br />
L<br />
ϕ iz + 2 E I z<br />
L<br />
ϕ iz + 4 E I z<br />
L<br />
ϕ jz,<br />
ϕ jz.<br />
(3.92)<br />
Ko upoštevamo prvi dve izmed enačb (3.90), izračunamo iz enačb (1.82) in (3.87)<br />
vozliščni sili n iy in n iz<br />
N y = −E I z<br />
d 3 u y<br />
dx 3 = −E I z C 1<br />
n iy = 12 E I z<br />
L 3<br />
n jy = − 12 E I z<br />
L 3<br />
u iy − 12 E I z<br />
L 3<br />
u iy + 12 E I z<br />
L 3<br />
u jy + 6 E I z<br />
L 2<br />
u jy − 6 E I z<br />
L 2<br />
ϕ iz + 6 E I z<br />
L 2 ϕ jz ,<br />
ϕ iz − 6 E I z<br />
L 2 ϕ jz .<br />
(3.93)<br />
Izraze (3.88), (3.92) in (3.93) dobimo s programom Mathematica z naslednjimi ukazi:
3.2 Ravninski okvir 319<br />
uy[x_]=c1 x^3 / 6 + c2 x^2 / 2 + c3 x + c4;<br />
uyc[x_]=c1 x^2 / 2 + c2 x + c3;<br />
uycc[x_]=c1 x + c2;<br />
res=Solve[{uy[0]==Uiy, uyc[0]==Fiiz, uy[L]==Ujy, uyc[L]==Fijz},<br />
{c1,c2,c3,c4}];<br />
Print["C1 = ", C1 = Expand[c1 /. res[[1]]]]<br />
Print["C2 = ", C2 = Expand[c2 /. res[[1]]]]<br />
Print["C3 = ", C3 = Expand[c3 /. res[[1]]]]<br />
Print["C4 = ", C4 = Expand[c4 /. res[[1]]]]<br />
Uycc[x_]=C1 x + C2;<br />
Uyccc[x_]=C1;<br />
Print["miz = ", Expand[-EI Uycc[0]]]<br />
Print["mjz = ", Expand[EI Uycc[L]]]<br />
Print["niy = ", Expand[EI Uyccc[0]]]<br />
Print["njy = ", Expand[-EI Uyccc[L]]]<br />
6 Fiiz 6 Fijz 12 Uiy 12 Ujy<br />
C1 = ------ + ------ + ------ - ------<br />
2 2 3 3<br />
L L L L<br />
-4 Fiiz 2 Fijz 6 Uiy 6 Ujy<br />
C2 = ------- - ------ - ----- + -----<br />
L L 2 2<br />
L L<br />
C3 = Fiiz<br />
C4 = Uiy<br />
4 EI Fiiz 2 EI Fijz 6 EI Uiy 6 EI Ujy<br />
miz = --------- + --------- + -------- - --------<br />
L L 2 2<br />
L<br />
L<br />
2 EI Fiiz 4 EI Fijz 6 EI Uiy 6 EI Ujy<br />
mjz = --------- + --------- + -------- - --------<br />
L L 2 2<br />
L<br />
L<br />
6 EI Fiiz 6 EI Fijz 12 EI Uiy 12 EI Ujy<br />
niy = --------- + --------- + --------- - ---------<br />
2 2 3 3<br />
L L L L<br />
-6 EI Fiiz 6 EI Fijz 12 EI Uiy 12 EI Ujy<br />
njy = ---------- - --------- - --------- + ---------<br />
2 2 3 3<br />
L L L L<br />
Izraz za togostno matriko [ k ] elementa na sliki 3.31 dobimo, če enačbe (3.84), (3.92) in (3.93) zapišemo<br />
v matrični obliki:<br />
⎡<br />
⎤⎡<br />
⎤ ⎡ ⎤<br />
E A x /L 0 0 −E A x /L 0 0 u ix n ix<br />
0 12 E I z /L 3 6 E I z /L 2 0 −12 E I z /L 3 6 E I z /L 2<br />
u iy<br />
n iy<br />
0 6 E I z /L 2 4 E I z /L 0 −6 E I z /L 2 2 E I z /L<br />
ϕ iz<br />
⎢−E A x /L 0 0 E A x /L 0 0<br />
⎥⎢<br />
u jx<br />
=<br />
m iz<br />
⎥ ⎢n jx<br />
. (3.94)<br />
⎥<br />
⎣ 0 −12 E I z /L 3 −6 E I z /L 2 0 12 E I z /L 3 −6 E I z /L 2 ⎦⎣<br />
u jy<br />
⎦ ⎣ n jy<br />
⎦<br />
0 6 E I z /L 2 2 E I z /L 0 −6 E I z /L 2 4 E I z /L ϕ jz m jz
320 3 Metoda pomikov<br />
Enačbo (3.94) krajše zapišemo takole<br />
[ k ]{u} = {n}. (3.95)<br />
Z matriko [ k ] je označena togostna matrika elementa z ravno osjo, ki se lahko premika le v ravnini<br />
x, y. Zapišimo še ravnotežne enačbe za element, na katerega delujejo le vozliščne sile. Če v enačbi<br />
∑ X = nix + n jx upoštevamo (3.84), dobimo<br />
n ix + n jx = 0. (3.96)<br />
Če pa v enačbi ∑ Y = n iy + n jy upoštevamo (3.93), v enačbi ∑ M i z = m iz + m jz + n jy L pa (3.92),<br />
dobimo<br />
n iy + n jy = 0, m iz + m jz + n jy L = 0. (3.97)<br />
To pomeni, da so vozliščne sile n ix , n iy , m iz , n jx , n jy in m jz , ki na element delujejo, v ravnotežju.<br />
Togostna matrika (3.94) ustreza linijskemu elementu, ki je v obeh krajiščih togo povezan z ostalimi<br />
elementi. V primeru, ko je element v začetnem ali pa v končnem vozlišču členkasto povezan z ostalimi<br />
elementi, je v takem vozlišču vozliščni moment enak nič. Togostno matriko takega elementa dobimo, če v<br />
enačbi (3.94) upoštevamo, da je m iz oziroma m jz enak nič. Tako lahko zasuk ϕ iz oziroma ϕ jz izrazimo<br />
s preostalimi petimi vozliščnimi prostostnimi stopnjami linijskega elementa in dobimo kondenzirano<br />
togostno matriko, ki je reda 5 × 5.<br />
Vzemimo, da ravnotežne enačbe linijskega elementa razdelimo takole:<br />
[ ] [ ] [ ]<br />
[kaa ] [k ab ] [Ua ] [Fa ]<br />
= . (3.98)<br />
[k ba ] [k bb ] [U b ] [F b ]<br />
Če je [F b ] = [0], iz (3.98) sledi<br />
oziroma<br />
Iz (3.98) sledi še<br />
Izraz (3.99) vstavimo v (3.100)<br />
[k ba ][U a ] + [k bb ][U b ] = [0]<br />
[U b ] = −[k bb ] −1 [k ba ][U a ]. (3.99)<br />
[k aa ][U a ] + [k ab ][U b ] = [F a ]. (3.100)<br />
[k aa ][U a ] − [k ab ][k bb ] −1 [k ba ][U a ] = ([k aa ] − [k ab ][k bb ] −1 [k ba ])[U a ] = [F a ].<br />
Matriko v okroglem oklepaju označimo s [k c ] in imenujemo kondenzirana togostna matrika<br />
[k c ] = [k aa ] − [k ab ][k bb ] −1 [k ba ]. (3.101)<br />
Tako dobimo<br />
[k c ][U a ] = [F a ]. (3.102)
3.2 Ravninski okvir 321<br />
Vidimo, da v enačbi (3.102) nastopata stolpca [F a ] in [U a ], ki imata manj elementov, kot je velikost<br />
matrike v enačbi (3.94). Zaradi enostavnejšega sestavljanja togostne matrike celotne konstrukcije kondenzirano<br />
togostno matriko običajno razširimo na velikost 6 × 6 tako, da dodamo na ustrezno mesto<br />
vrstico in stolpec z ničlami.<br />
Če pomike [U a ] poznamo, izračunamo pomike [U b ] iz enačbe (3.99). V nadaljevanju določimo tri kondenzirane<br />
togostne matrike elementa.<br />
Linijski element je členkasto povezan v začetnem vozlišču<br />
Enačbo (3.94) najprej preuredimo tako, da prestavimo m iz v [n] ter [ϕ iz ]v [u] na zadnje mesto. V tem<br />
primeru moramo tretjo vrstico v vseh treh matrikah in tretji stolpec v matriki [ k ] zapisati na zadnje mesto<br />
⎡<br />
⎤⎡<br />
⎤ ⎡ ⎤<br />
E A x /L 0 −E A x /L 0 0 0 u ix n ix<br />
0 12 E I z /L 3 0 −12 E I z /L 3 6 E I z /L 2 6 E I z /L 2<br />
u iy<br />
n iy<br />
−E A x /L 0 E A x /L 0 0 0<br />
u jx<br />
⎢ 0 −12 E I z /L 3 0 12 E I z /L 3 −6 E I z /L 2 −6 E I z /L 2<br />
⎥⎢<br />
u jy<br />
=<br />
n jx<br />
⎥ ⎢ n jy<br />
. (3.103)<br />
⎥<br />
⎣ 0 6 E I z /L 2 0 −6 E I z /L 2 4 E I z /L 2 E I z /L ⎦⎣<br />
ϕ jz<br />
⎦ ⎣m jz<br />
⎦<br />
0 6 E I z /L 2 0 −6 E I z /L 2 2 E I z /L 4 E I z /L ϕ iz 0<br />
Podmatrike [k aa ], [k ab ], [k ba ] in [k bb ] so<br />
⎡<br />
E A x /L 0 −E A x /L 0 0<br />
⎤<br />
0 12 E I z /L 3 0 −12 E I z /L 3 6 E I z /L 2<br />
[k aa ] =<br />
⎢−E A x /L 0 E A x /L 0 0<br />
⎥<br />
⎣ 0 −12 E I z /L 3 0 12 E I z /L 3 −6 E I z /L 2 ⎦ ,<br />
⎡<br />
0 6 E I z /L 2 0 −6 E I z /L 2 4 E I z /L<br />
⎤<br />
0<br />
6 E I z /L 2<br />
0 ⎥<br />
[k ab ] =<br />
⎢<br />
⎣<br />
−6 E I z /L 2<br />
6 E I z /L<br />
⎥<br />
⎦ ,<br />
[k ba ] = [ 0 6 E I z /L 2 0 −6 E I z /L 2 2 E I z /L ] ,<br />
[k bb ] = [4 E I z /L].<br />
Upoštevamo, da je [k bb ] −1 = [L/4 E I z ] in iz (3.101) dobimo kondenzirano togostno matriko za element,<br />
ki je členkasto povezan v začetnem vozlišču<br />
⎡<br />
⎤<br />
E A x /L 0 −E A x /L 0 0<br />
0 3 E I z /L 3 0 −3 E I z /L 3 3 E I z /L 2<br />
[k c ] =<br />
⎢−E A x /L 0 E A x /L 0 0<br />
⎥<br />
⎣ 0 −3 E I z /L 3 0 3 E I z /L 3 −3 E I z /L 2 ⎦ . (3.104)<br />
0 3 E I z /L 2 0 −3 E I z /L 2 3 E I z /L
322 3 Metoda pomikov<br />
Če kondenzirano togostno matriko razširimo, dobimo<br />
⎡<br />
⎤<br />
E A x /L 0 0 −E A x /L 0 0<br />
0 3 E I z /L 3 0 0 −3 E I z /L 3 3 E I z /L 2<br />
[k] =<br />
0 0 0 0 0 0<br />
⎢−E A x /L 0 0 E A x /L 0 0<br />
. (3.105)<br />
⎥<br />
⎣ 0 −3 E I z /L 3 0 0 3 E I z /L 3 −3 E I z /L 2 ⎦<br />
0 3 E I z /L 2 0 0 −3 E I z /L 2 3 E I z /L<br />
Linijski element je členkasto povezan v končnem vozlišču<br />
V tem primeru so podmatrike [k aa ], [k ab ], [k ba ] in [k bb ] take (glej (3.94))<br />
⎡<br />
⎤<br />
E A x /L 0 0 −E A x /L 0<br />
0 12 E I z /L 3 6 E I z /L 2 0 −12 E I z /L 3<br />
[k aa ] =<br />
⎢ 0 6 E I z /L 2 4 E I z /L 0 −6 E I z /L 2<br />
⎥<br />
⎣−E A x /L 0 0 E A x /L 0 ⎦ ,<br />
0 −12 E I z /L 3 −6 E I z /L 2 0 12 E I z /L 3<br />
⎡ ⎤<br />
0<br />
6 E I z /L 2<br />
[k ab ] =<br />
⎢ 2 E I z /L<br />
⎥<br />
⎣ 0 ⎦ ,<br />
−6 E I z /L 2<br />
[k ba ] = [ 0 6 E I z /L 2 2 E I z /L 0 −6 E I z /L 2] ,<br />
[k bb ] = [4 E I z /L].<br />
Upoštevamo, da je [k bb ] −1 = [L/4 E I z ] in iz (3.101) dobimo kondenzirano togostno matriko za element,<br />
ki je členkasto povezan v končnem vozlišču<br />
⎡<br />
⎤<br />
E A x /L 0 0 −E A x /L 0<br />
0 3 E I z /L 3 3 E I z /L 2 0 −3 E I z /L 3<br />
[k c ] =<br />
⎢ 0 3 E I z /L 2 3 E I z /L 0 −3 E I z /L 2<br />
⎥<br />
⎣−E A x /L 0 0 E A x /L 0 ⎦ . (3.106)<br />
0 −3 E I z /L 3 −3 E I z /L 2 0 3 E I z /L 3<br />
Če sedaj kondenzirano togostno matriko razširimo, dobimo<br />
⎡<br />
⎤<br />
E A x /L 0 0 −E A x /L 0 0<br />
0 3 E I z /L 3 3 E I z /L 2 0 −3 E I z /L 3 0<br />
[k] =<br />
0 3 E I z /L 2 3 E I z /L 0 −3 E I z /L 2 0<br />
⎢−E A x /L 0 0 E A x /L 0 0<br />
. (3.107)<br />
⎥<br />
⎣ 0 −3 E I z /L 3 −3 E I z /L 2 0 3 E I z /L 3 0⎦<br />
0 0 0 0 0 0
3.2 Ravninski okvir 323<br />
Linijski element je členkasto povezan v obeh vozliščih<br />
Enačbo (3.94) najprej preuredimo tako, da prestavimo m iz in m jz v [n] ter [ϕ iz ] in [ϕ jz ] v [u] na predzadnje<br />
in zadnje mesto. V tem primeru tretjo vrstico v matriki [k] v (3.94) zapišemo v peto vrstico, tretji<br />
stolpec pa v petega. Vzamemo, da sta m iz = 0 in m jz = 0 in dobimo<br />
⎡<br />
⎤⎡<br />
⎤ ⎡<br />
E A x /L 0 −E A x /L 0 0 0 u ix<br />
0 12 E I z /L 3 0 −12 E I z /L 3 6 E I z /L 2 6 E I z /L 2<br />
u iy<br />
−E A x /L 0 E A x /L 0 0 0<br />
u jx<br />
⎢ 0 −12 E I z /L 3 0 12 E I z /L 3 −6 E I z /L 2 −6 E I z /L 2<br />
⎥⎢<br />
u jy<br />
=<br />
⎥ ⎢<br />
⎣ 0 6 E I z /L 2 0 −6 E I z /L 2 4 E I z /L 2 E I z /L ⎦⎣<br />
ϕ iz<br />
⎦ ⎣<br />
0 6 E I z /L 2 0 −6 E I z /L 2 2 E I z /L 4 E I z /L ϕ jz<br />
n ix<br />
n iy<br />
n jx<br />
n jy<br />
0<br />
0<br />
⎤<br />
. (3.108)<br />
⎥<br />
⎦<br />
Podmatrike [k aa ], [k ab ], [k ba ] in [k bb ] so<br />
⎡<br />
⎤<br />
E A x /L 0 −E A x /L 0<br />
[k aa ] = ⎢ 0 12 E I z /L 3 0 −12 E I z /L 3<br />
⎥<br />
⎣−E A x /L 0 E A x /L 0 ⎦ ,<br />
0 −12 E I z /L 3 0 12 E I z /L 3<br />
⎡<br />
⎤<br />
0 0<br />
[k ab ] = ⎢ 6 E I z /L 2 6 E I z /L 2<br />
⎥<br />
⎣ 0 0 ⎦ ,<br />
−6 E I z /L 2 −6 E I z /L 2<br />
[ 0 6 E Iz /L<br />
[k ba ] =<br />
2 0 −6 E I z /L 2 ]<br />
0 6 E I z /L 2 0 −6 E I z /L 2 ,<br />
[ ]<br />
4 E Iz /L 2 E I<br />
[k bb ] =<br />
z /L<br />
.<br />
2 E I z /L 4 E I z /L<br />
Izračunamo [k bb ] −1 [k bb ] −1 = L [ ] 4 −2<br />
.<br />
12 E I z −2 4<br />
in dobimo kondenzirano togostno matriko za element, ki je členkasto povezan v obeh vozliščih<br />
⎡<br />
⎤<br />
E A x /L 0 −E A x /L 0<br />
[k c ] = ⎢ 0 0 0 0<br />
⎥<br />
⎣−E A x /L 0 E A x /L 0⎦ . (3.109)<br />
0 0 0 0
324 3 Metoda pomikov<br />
Če sedaj kondenzirano togostno matriko razširimo, dobimo<br />
⎡<br />
⎤<br />
E A x /L 0 0 −E A x /L 0 0<br />
0 0 0 0 0 0<br />
[k] =<br />
0 0 0 0 0 0<br />
⎢−E A x /L 0 0 E A x /L 0 0<br />
. (3.110)<br />
⎥<br />
⎣ 0 0 0 0 0 0⎦<br />
0 0 0 0 0 0<br />
3.2.4 Togostna matrika elementa v globalnem koordinatnem sistemu<br />
Izraz za togostno matriko [ k ] elementa na sliki 3.31 glede na lokalni koordinatni sistem zapišimo takole<br />
(enačba (3.74)):<br />
[ ] [ ] [ ] [ ]<br />
[ kii ] [ k ij ] [ui ] [ui ] [ni ]<br />
= [ k ] =<br />
(3.111)<br />
[ k ji ] [ k jj ] [u j ] [u j ] [n j ]<br />
Če upoštevamo enačbo (3.94), zapišemo matrike [ k ii ], [ k ij ], [ k ji ] in [ k jj ] takole:<br />
⎡<br />
E A x /L 0 0<br />
⎤<br />
[ k ii ] = ⎣ 0 12 E I z /L 3 6 E I z /L 2 ⎦ ,<br />
0 6 E I z /L 2 4 E I z /L<br />
⎡<br />
−E A x /L 0 0<br />
⎤<br />
[ k ij ] = ⎣ 0 −12 E I z /L 3 6 E I z /L 2 ⎦ ,<br />
0 −6 E I z /L 2 2 E I z /L<br />
⎡<br />
−E A x /L 0 0<br />
⎤<br />
[ k ji ] = ⎣ 0 −12 E I z /L 3 −6 E I z /L 2 ⎦ ,<br />
0 6 E I z /L 2 2 E I z /L<br />
⎡<br />
⎤<br />
E A x /L 0 0<br />
[ k jj ] = ⎣ 0 12 E I z /L 3 −6 E I z /L 2 ⎦ .<br />
0 −6 E I z /L 2 4 E I z /L<br />
(3.112)<br />
Iz (3.112) sledi, da sta matriki [ k ii ] in [ k jj ] simetrični, za matriki [ k ij ] in [ k ji ] pa velja zveza [ k ij ] =<br />
[ k ji ] T .<br />
Zapis enačbe (3.111) v globalnem koordinatnem sistemu<br />
Enačba (3.111) je zapisana glede na lokalni koordinatni sistem elementa. V nadaljevanju to enačbo<br />
zapišemo glede na globalni koordinatni sistem. Zvezi med vozliščnimi silami [n i ] in [N i ] ter [n j ] in [N j ]<br />
zapišemo z enačbama<br />
[n i ] = [ T ][N i ], [n j ] = [ T ][N j ]. (3.113)
3.2 Ravninski okvir 325<br />
Matriko [ T ] izrazimo s kotom β med osjo X in osjo x po enačbah (slika 3.36)<br />
n ix = N iX cos β + N iY sin β,<br />
n iy = −N iX sin β + N iY cos β,<br />
m iz = M iZ .<br />
(3.114)<br />
SLIKA 3.36: Kot β merimo med osjo X in osjo x v pozitivni smeri zasuka<br />
Enačbe (3.114) zapišimo v matrični obliki<br />
⎡ ⎤ ⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
n ix cos β sin β 0 N iX N iX<br />
⎣ n iy<br />
⎦ = ⎣− sin β cos β 0⎦<br />
⎣N iY<br />
⎦ = [ T ] ⎣N iY<br />
⎦ . (3.115)<br />
m iz 0 0 1 M iZ M iZ<br />
Matrika [ T ] je ortogonalna, zato velja †<br />
Iz (3.113) izračunamo [N i ] in [N j ]<br />
[ T ] T [ T ] = [ I ] → [ T ] −1 = [ T ] T . (3.116)<br />
[N i ] = [ T ] T [n i ], [N j ] = [ T ] T [n j ]. (3.117)<br />
Enačbi (3.113) in (3.117) sta zapisani za vozliščne sile. Na enak način zapišemo enačbe za vozliščne<br />
pomike<br />
[u i ] = [ T ][U i ], [u j ] = [ T ][U j ] (3.118)<br />
oziroma<br />
Enačbo (3.111) lahko zapišemo v obliki dveh matričnih enačb<br />
[U i ] = [ T ] T [u i ], [U j ] = [ T ] T [u j ]. (3.119)<br />
[ k ii ] [u i ] + [ k ij ] [u j ] = [n i ],<br />
[ k ji ] [u i ] + [ k jj ] [u j ] = [n j ].<br />
(3.120)<br />
†<br />
⎡<br />
⎤ ⎡<br />
⎤ ⎡ ⎤<br />
cos β − sin β 0 cos β sin β 0 1 0 0<br />
[ T ] T [ T ] = ⎣sin β cos β 0⎦<br />
⎣− sin β cos β 0⎦ = ⎣0 1 0⎦ = [ I ]<br />
0 0 1 0 0 1 0 0 1