2.6 - FGG-KM - Univerza v Ljubljani
2.6 - FGG-KM - Univerza v Ljubljani
2.6 - FGG-KM - Univerza v Ljubljani

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
266 2 Enakomerna torzija<br />
vrednost I ΦP z pa z integriranjem produkta y in Φ P<br />
10 · 0.1<br />
20 · 0.1<br />
I ΦP z = Φ P 3 (2 y 3 + y 4 ) + [Φ P 3 (2 y 3 + y 5 ) + Φ P 5 (2 y 5 + y 3 ) ]+<br />
6<br />
6<br />
30 · 0.1<br />
20 · 0.05<br />
+ [Φ P 5 (2 y 5 + y 6 ) + Φ P 6 (2 y 6 + y 5 ) ] + [Φ P 2 (2 y 2 + y 1 ) + Φ P 1 (2 y 1 + y 2 ) ]+<br />
6<br />
6<br />
30 · 0.05<br />
30 · 0.1<br />
+ [Φ P 7 (2 y 7 + y 8 ) + Φ P 8 (2 y 8 + y 7 ) ] + [Φ P 3 (2 y 3 + y 2 ) + Φ P 2 (2 y 2 + y 3 ) ]+<br />
6<br />
6<br />
20 · 0.05<br />
10 · 0.05<br />
+ [Φ P 5 (2 y 5 + y 7 ) + Φ P 7 (2 y 7 + y 5 ) ] + [Φ P 7 (2 y 7 + y 1 ) + Φ P 1 (2 y 1 + y 6 ) ]+<br />
6<br />
6<br />
20 · 0.1<br />
+ [Φ P 6 (2 y 6 + y 8 ) + Φ P 8 (2 y 8 + y 6 ) ] = −23890.7 cm 5 .<br />
6<br />
Konstanti A in B izračunamo iz enačb (2.156)<br />
A = − I y I ΦP z + I yz I ΦP y<br />
I y I z − I 2 yz<br />
= 4.28896 cm, B = I z I ΦP y + I yz I ΦP z<br />
I y I z − I 2 yz<br />
= −3.10133 cm.<br />
Koordinati torzijskega središča izračunamo iz enačb (2.139)<br />
y C = y P − B = 3.10133 cm,<br />
z C = z P − A = −4.28896 cm.<br />
Izbočitveno funkcijo Φ izračunamo po enačbi (2.154). Ker konstanta Φ 0 ne vpliva na velikost izbočitvene<br />
funkcije Φ, izberemo, da je<br />
Φ 0 = 0 (2.220)<br />
in pišemo<br />
Φ = Φ P + A y − B z − S ΦP<br />
A x<br />
= Φ P + 4.28896 y + 3.10133 z − 61.3636.<br />
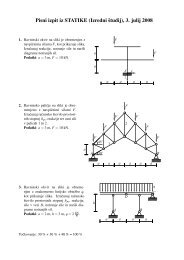
Vrednosti izbočitvene funkcije Φ v vozliščih podajamo v preglednici (2.3). Potek izbočitvene funkcije<br />
Φ prikazujemo na sliki <strong>2.6</strong>7.<br />
SLIKA <strong>2.6</strong>7: Izbočitvena funkcija Φ ter lega torzijskega središča C<br />
Pomik u x izračunamo po enačbi (2.146), kjer za T 0 izberemo vozlišče 7. Zato je T 0 ≡ T 7 :<br />
ū xi = u xi − u x7 + α(Φ − Φ 7 ).
<strong>2.6</strong> Strižno in torzijsko središče 267<br />
Specifični torzijski zasuk α je<br />
α =<br />
15000<br />
7.5 · 10 4 · 2618.18 = 0.00007639 cm−1 .<br />
Pomike ū xi posameznih točk glede na vozlišče 7 prikazujemo v preglednici 2.3.<br />
Za račun pomikov u y = −ω x (z − z C ) in u z = ω x (y − y C ) (enačba (2.30)) v prečnem prerezu x = L<br />
potrebujemo zasuk ω x , ki ga v primeru, da je zasuk ω x (0) pri x = 0 enak nič, izračunamo po enačbi<br />
(2.25)<br />
ω x (L) = α L = 0.00007639 · 400 = 0.03056 radianov.<br />
Pomike u y in u z v vozliščih prečnega prereza prikazujemo v preglednici 2.3.<br />
<strong>2.6</strong> Strižno in torzijsko središče<br />
V literaturi obstajajo različne definicije strižnega in torzijskega središča. V tem razdelku prikažemo<br />
dve različni definiciji strižnega in dve različni definiciji torzijskega središča ter enačbe za račun njunih<br />
koordinat.<br />
<strong>2.6</strong>.1 Strižno središče<br />
Definicija strižnega središča je zasnovana na definiciji upogiba z osno silo oziroma upogiba brez zvijanja<br />
okrog vzdolžne osi. Oglejmo si dve definiciji upogiba brez zvijanja okrog vzdolžne osi. †<br />
Prva definicija upogiba brez zvijanja okrog vzdolžne osi<br />
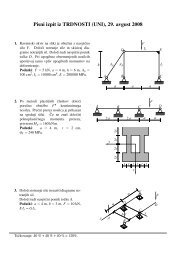
Saint-Venantov problem predstavlja reševanje osnovnih enačb linearne teorije elastičnosti (kinematičnih<br />
enačb, ravnotežnih enačb in enačb Hookovega zakona) za primer linijskega nosilca s konstantnim prečnim<br />
prerezom A x (slika <strong>2.6</strong>8), če predpostavimo, da je<br />
σ yz = σ yy = σ zz = 0. (2.221)<br />
Pri tem predpostavimo, da je nosilec obtežen le v krajnih prerezih x = 0 in x = L.<br />
Rešitev enačb pokaže, da se odvod ∂ω x /∂x zasuka elementa prečnega prereza okrog vzdolžne osi od<br />
točke do točke prečnega prereza spreminja. Izraz ∂ω x /∂x predstavlja relativni zasuk dveh enako ležečih<br />
elementov sosednih prečnih prerezov.<br />
† Y.C. Fung, An Introduction to the Theory of Aeroelasticity, John Wiley & Sons, New York, 1955.
268 2 Enakomerna torzija<br />
SLIKA <strong>2.6</strong>8: Obravnavamo linijski nosilec s kostantnim prečnim prerezom A x<br />
Upogib brez zasuka lahko definiramo z zahtevo, da je povprečna vrednost ∂ω x /∂x po celem prečnem<br />
prerezu enaka nič<br />
∫<br />
∂ω x<br />
∂x dA x = 0. (2.222)<br />
A x<br />
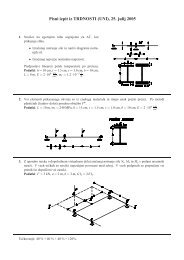
Strižno središče S je točka prečnega prereza, skozi katero potekata prečni sili N y in N z , da v nosilcu<br />
nastane deformacijsko stanje, ki ustreza enačbi (2.222) (slika <strong>2.6</strong>9).<br />
SLIKA <strong>2.6</strong>9: Če prečni sili N y in N z delujeta v strižnem središču S, nastopa upogib brez zvijanja<br />
Pri taki definiciji upogiba brez zvijanja okrog vzdolžne osi je lega strižnega središča odvisna od Poissonovega<br />
količnika ν. Izraza za koordinati y S , z S strižnega središča, ki ustreza pogoju (2.222), podaja več<br />
avtorjev. Oglejmo si tri primere.
<strong>2.6</strong> Strižno in torzijsko središče 269<br />
Goodier podaja izraz za koordinato z S ob predpostavki (2.222) †<br />
∫ (<br />
1<br />
y S = −<br />
y ∂χ<br />
2 (1 + ν) I y ∂z − z ∂χ (1<br />
∂y + − ν 2<br />
A x<br />
∫ (<br />
1<br />
z S = −<br />
z ∂χ<br />
2 (1 + ν) I z ∂y − y ∂χ (1<br />
∂z + − ν 2<br />
A x<br />
) (<br />
y 3 − 2 + ν ) )<br />
z 2 y dA x ,<br />
2<br />
) (<br />
z 3 − 2 + ν ) )<br />
y 2 z dA x .<br />
2<br />
(2.223)<br />
Strižno (upogibno) funkcijo χ izračunamo iz enačbe ‡<br />
∂ 2 χ<br />
∂y 2 + ∂2 χ<br />
∂z 2 = 0<br />
in robnega pogoja<br />
∂χ<br />
[ ν<br />
(<br />
∂η = − 2 y2 + 1 − ν )<br />
z 2] e ηy − (2 + ν) y z e ηz .<br />
2<br />
Z upoštevanjem iste predpostavke dobi Sokolnikoff § naslednja izraza za y S in z S<br />
y S =<br />
z S =<br />
1<br />
2 (1 + ν) (I y I z − Iyz) 2 (I z S 2 − I yz S 1 ),<br />
1<br />
2 (1 + ν) (I y I z − Iyz) 2 (I yz S 2 − I y S 1 ),<br />
(2.224)<br />
kjer oznaki S 1 in S 2 pomenita<br />
∫ [<br />
S 1 = y ∂ϕ 1<br />
∂z − z ∂ϕ ]<br />
1<br />
∂y + (1 + ν) y2 z − ν z 3 dA x ,<br />
A x<br />
∫ [<br />
S 2 = y ∂ϕ 2<br />
∂z − z ∂ϕ ]<br />
2<br />
∂y − (1 + ν) y z2 + ν y 3 dA x ,<br />
A x<br />
Funkciji ϕ 1 in ϕ 2 sta harmonični strižni funkciji, ki ju izračunamo iz enačb<br />
ob upoštevanju robnih pogojev<br />
∂ 2 ϕ 1<br />
∂y 2 + ∂2 ϕ 1<br />
∂z 2 = 0, ∂ 2 ϕ 2<br />
∂y 2 + ∂2 ϕ 2<br />
∂z 2 = 0<br />
∂ϕ 1<br />
∂η = [ (1 + ν) y2 − ν z 2 ] e ηy ,<br />
∂ϕ 2<br />
∂η = [ (1 + ν) z2 − ν y 2 ] e ηz .<br />
† J.N. Goodier, A Theorem on the Shearing Stress in Beams with Applications to Multicelluar Sections, Journal of the<br />
Aeronautical Sciences, Vol. 11, No. 3, 272-280, July, 1944.<br />
‡ A.E.H. Love, A Treatise on the Mathematical Theory of Elasticity, Dover Publications, New York, fourth edition, 1944.<br />
§ I.S. Sokolnikoff, Mathematical Theory of Elasticity, McGraw-Hill Book Company, New York, 1956.
270 2 Enakomerna torzija<br />
Sokolnikoff † pokaže, da enačbi strižnega središča po Goodieru in Sokolnikoffu določata isto točko. V<br />
diplomi Polone Vončina ‡ sta podana naslednja izraza za račun koordinat strižnega središča:<br />
∫ (<br />
1<br />
y S =<br />
y ∂Φ y<br />
2 (1 + ν) I y ∂z − z ∂Φ y<br />
∂y + 1 + ν y z 2 − 1 − ν )<br />
y 3 dA x ,<br />
2<br />
2<br />
A x<br />
∫ (<br />
1<br />
z S = −<br />
y ∂Φ z<br />
2 (1 + ν) I z ∂z − z ∂Φ z<br />
∂y − 1 + ν<br />
2<br />
A x<br />
y 2 z + 1 − ν<br />
2<br />
Funkciji Φ y in Φ z sta harmonični strižni funkciji, ki ju izračunamo iz enačb<br />
z 3 )<br />
dA x .<br />
(2.225)<br />
∂ 2 Φ y<br />
∂y 2<br />
+ ∂2 Φ y<br />
∂z 2 = 0, ∂ 2 Φ z<br />
∂y 2 + ∂2 Φ z<br />
∂z 2 = 0<br />
ob upoštevanju robnih pogojev<br />
∂Φ y<br />
∂η = (1 + ν) y z e ηy +<br />
( 1 + ν<br />
2<br />
z 2 + 1 − ν<br />
2<br />
y 2 )<br />
e ηz ,<br />
(<br />
∂Φ z 1 + ν<br />
∂η = y 2 + 1 − ν )<br />
z 2 e ηy + (1 + ν) y z e ηz .<br />
2 2<br />
Druga definicija upogiba brez zvijanja okrog vzdolžne osi<br />
Trefftz je predlagal definicijo upogiba brez zvijanja okrog vzdolžne osi na osnovi deformacijske energije.<br />
§ Če konzolni nosilec obtežimo v prostem krajišču s torzijskim momentom M, se to krajišče zasuče<br />
za kot α. Deformacijska energija v nosilcu je enaka delu W 1 , ki ga opravi moment na zasuku<br />
W 1 = 1 2 M α.<br />
V primeru, če v prostem krajišču deluje le sila F z , ki povzroči pomik w L prostega krajišča konzole, je<br />
deformacijska energija W 2 enaka<br />
W 2 = 1 2 F z w L .<br />
Če delujeta moment M in sila F z istočasno, deformacijska energija v nosilcu v splošnem ni enaka vsoti<br />
W 1 in W 2 . * Vzemimo, da na nosilec deluje najprej le moment M, ki opravi delo W 1 . Nato naj deluje še<br />
sila F z , moment M pa je konstanten. Sila F z opravi delo W 2 , moment M pa opravi še dodatno delo, ki<br />
† I.S. Sokolnikoff, Mathematical Theory of Elasticity, McGraw-Hill Book Company, New York, 1956.<br />
‡ Polona Vončina, Napetosti in pomiki upogibnega nosilca po Saint-Venantu, diplomska naloga, (mentor prof. D. Jurišić)<br />
FAGG, Ljubljana, 1983.<br />
§ E. Trefftz, Über den Schubmittelpunkt in einem durch eine Einzellast gebogenen Balken, Zeitschrift für Angewandte<br />
Mathematik und Mechanik, Vol. 15, No. 4, 220-225, 1935.<br />
* F. de Veubeke, A Course in Elasticity, Springer-Verlag, New York, 1979.
<strong>2.6</strong> Strižno in torzijsko središče 271<br />
ustreza kotu zasuka zaradi sile F z . Trefftz definira upogib brez zvijanja okrog vzdolžne osi s pogojem,<br />
da je deformacijska energija zaradi omenjenega dodatnega dela, enaka nič.<br />
V primeru, če prečni sili N y in N z delujeta v strižnem središču nastopa v nosilcu “čisti” upogib. Nato<br />
dodamo še moment M. V tem primeru je deformacijska energija nosilca enaka vsoti energij zaradi<br />
torzije in zaradi “čistega” upogiba. Vrstni red nanašanja F z in M ni pomemben. Izraz za koordinati<br />
strižnega središča na osnovi tako definiranega upogiba brez zvijanja okrog vzdolžne osi lahko zapišemo<br />
z izbočitveno funkcijo Φ enakomerne torzije †<br />
y S = − I z I Φy + I yz I Φz<br />
I y I z − I 2 yz<br />
, z S = I y I Φz + I yz I Φy<br />
I y I z − Iyz<br />
2 . (2.226)<br />
Pri tem je<br />
∫<br />
∫<br />
I Φy = z Φ dA x , I Φz = y Φ dA x , (2.227)<br />
A x A x<br />
Izbočitveno funkcijo Φ izračunamo iz enačbe ‡<br />
A x :<br />
∂ 2 Φ<br />
∂y 2 + ∂2 Φ<br />
= 0, (2.228)<br />
∂z2 ob upoštevanju robnega pogoja<br />
C x :<br />
⎛<br />
⎜<br />
⎝ ∂Φ<br />
∂y − z − 1 ∫<br />
A x<br />
C x<br />
⎞ ⎛<br />
⎟ ⎜<br />
Φ dz⎠ e ηy + ⎝ ∂Φ<br />
∂z + y + 1 ∫<br />
A x<br />
C x<br />
⎞<br />
⎟<br />
Φ dy⎠ e ηz = 0. (2.229)<br />
V tem primeru je strižno središče neodvisno od Poissonovega koeficienta ν, namesto enačbe (2.222) pa<br />
velja †<br />
∫<br />
∂ω x<br />
∂x ¯ϕ dA x = 0.<br />
A cel<br />
S ¯ϕ označimo razširjeno napetostno funkcijo ϕ, ki vključuje tudi odprtine v prečnem prerezu<br />
¯ϕ = ϕ na A x ,<br />
¯ϕ = ϕ ni na A i , i = 1, . . . , N.<br />
Z A cel je označeno območje prečnega prereza A x vključno z odprtinami.<br />
‡ A. Carpinteri, Structural Mechanics–A Unified Approach, E & FN SPON, London, 1997.<br />
† F. de Veubeke, A Course in Elasticity, Springer-Verlag, New York, 1979.
272 2 Enakomerna torzija<br />
<strong>2.6</strong>.2 Torzijsko središče<br />
Tudi za torzijsko središče obstajajo različne definicije. Oglejmo si dve.<br />
Prva definicija torzijskega središča<br />
Torzijsko središče C(y C , z C ) je točka, okoli katere se prečni prerez v primeru enakomerne torzije zasuče.<br />
Z izbočitveno funkcijo Φ enakomerne torzije izračunamo koordinati y C in z C takole: †<br />
y C =<br />
1 ∫<br />
z C = − 1 ∫<br />
A x A x<br />
A x<br />
Enačbi (2.230) sta izpeljani v razdelku 2.2.<br />
Druga definicija torzijskega središča<br />
∂Φ<br />
∂z dA x,<br />
A x<br />
∂Φ<br />
∂y dA x. (2.230)<br />
V rešitvi za Saint-Venantov problem upoštevamo, da se nosilec le zasuče okrog vzdožne osi. Nato<br />
vzamemo, da veljajo za prečni prerez x = 0, kjer je konzola vpeta, naslednji pogoji: ‡<br />
a) Pomika u y in u z sta enaka nič:<br />
u y = 0, u z = 0 za x = 0.<br />
b) Če v rešitvi za Saint-Venantov problem upoštevamo, da se nosilec le zasuče okrog vzdožne osi,<br />
lahko vzdolžni pomik u x izrazimo s tremi parametri c, p in q. Če nato zahtevamo, da ima povprečna<br />
vrednost kvadrata vzdolžnega pomika u x minimalno vrednost glede na parametre c, p in<br />
q<br />
∫<br />
A x<br />
(u x (c, p, q)) 2 dA x = minimum za x = 0,<br />
kar lahko napišemo z enačbami<br />
∫<br />
A x<br />
u x dA x = 0,<br />
∫<br />
A x<br />
y u x dA x = 0,<br />
∫<br />
A x<br />
z u x dA x = 0, (2.231)<br />
dobimo izraz za torzijsko središče, ki sovpada s strižnim središčem, definiranim po Trefftzu (enačbi<br />
(2.226)), kar pokaže Veubeke §<br />
y C ≡ y S = − I z I Φy + I yz I Φz<br />
I y I z − I 2 yz<br />
Druga možnost je uporaba enačb (2.157).<br />
, z C ≡ z S = I y I Φz + I yz I Φy<br />
I y I z − Iyz<br />
2 . (2.232)<br />
† A. Carpinteri, Structural Mechanics–A Unified Approach, E & FN SPON, London, 1997.<br />
‡ A. Weinstein, The Center of Shear and the Center of Twist, Quarterly of Applied Mathematics, Vol. V, No. 1, 97-99,<br />
1947.<br />
§ F. de Veubeke, A Course in Elasticity, Springer-Verlag, New York, 1979.
<strong>2.6</strong> Strižno in torzijsko središče 273<br />
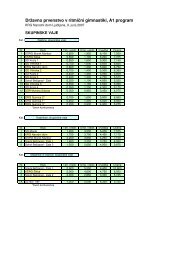
Primer 2.7 Obravnavamo prečni prerez z eno simetrijsko osjo. Dimenzije prečnega prereza so podane<br />
na sliki 2.70, vrednost Poissonovega koeficeinta pa je ν = 0.3. Izračunajmo torzijski vztrajnostni moment<br />
I x z uporabo napetostne funkcije ϕ(y, z) in izbočitvene funkcije Φ(y, z). Izračunajmo koordinati<br />
strižnega in torzijskega središča prečnega prereza po različnih definicijah. Za reševanje parcialnih diferencialnih<br />
enačb uporabimo diferenčno metodo.<br />
SLIKA 2.70: Dimenzije prečnega prereza oblike ”C”<br />
Določimo najprej napetostno funkcijo ϕ(y, z) iz diferencialne enačbe (2.85) z robnim pogojem (2.82).<br />
Problem rešimo z diferenčno metodo in prikazuejmo na sliki 2.71.<br />
SLIKA 2.71: Napetostna funkcija ϕ(y, z)<br />
Torzijski vztrajnostni moment I x izračunamo z integriranjem napetostne funkcije ϕ(y, z) po prečnem
274 2 Enakomerna torzija<br />
prerezu, (enačba (2.31)), strižne napetosti pa izračunamo z odvajanjem napetostne funkcije po enačbah<br />
(2.95). Torzijski vztrajnostni moment je<br />
I x = 0.1483 cm 4 .<br />
Razporeditev strižnih napetosti σ xy in σ xz prikazujemo na sliki 2.72.<br />
SLIKA 2.72: Strižne napetosti σ xy (y, z) in σ xz (y, z) zaradi M x = 1 kNcm<br />
Z diferenčno metodo rešimo diferencialno enačbo (2.42) z robnimi pogoji (2.51) in določimo izbočitveno<br />
funkcijo Φ(y, z), ki jo prikazujemo na sliki 2.73.<br />
SLIKA 2.73: Izbočitvena funkcija Φ(y, z)
<strong>2.6</strong> Strižno in torzijsko središče 275<br />
Z enačbo (2.53) izračunamo torzijski vztrajnostni moment I x , z (2.46) pa lahko izračunamo tudi koordinati<br />
y C in z C torzijskega središča C.<br />
I x = 0.1490 cm 4 , y C = 0.767 cm, z C = 0 cm.<br />
Iz (2.45) izračunamo strižni napetosti σ xy in σ xz , ki so skoraj enake tistim, prikazanim na sliki 2.72.<br />
Razlike nastopijo zaradi numerične napake.<br />
Koordinate strižnega središča S lahko izračunamo tudi po različnih definicijah z enačbami (2.223),<br />
(2.224), (2.225) in (2.226). Rezultate prikazujemo v preglednici 2.4.<br />
PREGLEDNICA 2.4: Koordinati strižnega središča po različnih definicijah<br />
Definicija enačba (2.223) enačba (2.224) enačba (2.225) enačba (2.226)<br />
(Goodier) (Sokolnikoff) (Vončina) (Trefftz)<br />
y s 0.771 0.771 0.771 0.003<br />
Vidimo, da dobimo po treh definicijah isto vrednost, različna pa je vrednost, ki jo izračunamo po enačbi<br />
(2.226). Koordinata torzijskega središča (enačba (2.46)) se le za malo razlikuje od koordinate strižnega<br />
središča (enačba (2.223–2.225)).
3 Metoda pomikov<br />
V 3. poglavju obravnavamo ravninske linijske konstrukcije po metodi pomikov. Pri tem v razdelku 3.1<br />
izpeljemo enačbe za ravninsko paličje, v razdelku 3.2 pa za ravninski okvir.<br />
3.1 Ravninsko paličje<br />
V tem poglavju obravnavamo paličje v ravnini X, Y . Osnovne enačbe mehanike trdnih teles (ravnotežne<br />
enačbe, kinematične enačbe in Hookov zakon) rešimo po metodi pomikov. To pomeni, da ravnotežne<br />
enačbe izrazimo s pomiki. Ker pri metodi pomikov pomikov ne računamo iz deformacij, kompatibilnostnih<br />
pogojev ne upoštevamo.<br />
3.1.1 Kinematična enačba in Hookov zakon<br />
Pri metodi pomikov izrazimo ravnotežne enačbe s pomiki. Pri paličju so to pomiki vozlišč konstrukcije,<br />
v katerih so palice med seboj povezane. Obravnavamo palico, ki povezuje vozlišči i in j s koordinatama<br />
X i , Y i in X j , Y j ter ima dolžino l i,j (slika 3.1). Palica je usmerjena od vozlišča i k vozlišču j.<br />
SLIKA 3.1: Palico opišemo s številko začetnega i in končnega j vozlišča<br />
Z α i,j in β i,j označimo kota, ki ju palica oklepa z enotskima vektorjema ⃗e X in ⃗e Y (slika 3.1).<br />
cos α i,j = X j − X i<br />
l i,j<br />
cos β i,j = Y j − Y i<br />
l i,j<br />
. (3.1)
3.1 Ravninsko paličje 277<br />
Iz enačb (3.1) sledi<br />
cos α j,i = X i − X j<br />
l j,i<br />
= − cos α i,j , cos β j,i = Y i − Y j<br />
l j,i<br />
= − cos β i,j . (3.2)<br />
Dolžino palice l ij izračunamo po enačbi (slika 3.2)<br />
l i,j = (X j − X i ) cos α i,j + (Y j − Y i ) cos β i,j . (3.3)<br />
SLIKA 3.2: Dolžino palice izrazimo z razliko koordinat X j − X i in Y j − Y i<br />
Zaradi vpliva zunanje obtežbe, ki deluje v vozliščih palične konstrukcije, se vozlišči i in j premakneta v<br />
novo lego, ki jo opišemo s koordinatami X i ′, Y i ′ in X′ j , Y j ′ (slika 3.3)<br />
X i , Y i → X ′ i, Y ′<br />
i , X j , Y j → X ′ j, Y ′<br />
j .<br />
SLIKA 3.3: Začetna in deformirana lega palice
278 3 Metoda pomikov<br />
Če z u i , v i in u j , v j označimo komponente pomikov vozlišč i in j v smereh X in Y osi<br />
sledi<br />
⃗u i = u i ⃗e X + v i ⃗e Y , ⃗u j = u j ⃗e X + v j ⃗e Y , (3.4)<br />
X ′ i = X i + u i , Y ′<br />
i = Y i + v i , X ′ j = X j + u j , Y ′<br />
j = Y j + v j . (3.5)<br />
Po deformiranju se spremenita kota, ki ju palica oklepa s koordinatnima osema<br />
cos α ′ i,j = X′ j − X′ i<br />
l ′ i,j<br />
, cos β i,j ′ = Y j ′ − Y i<br />
′<br />
l<br />
i,j<br />
′<br />
(3.6)<br />
ter dolžina palice<br />
l ′ i,j = (X ′ j − X ′ i) cos α ′ i,j + (Y ′<br />
j − Y ′<br />
i ) cos β ′ i,j. (3.7)<br />
Če so pomiki vozlišč palične konstrukcije majhni v primerjavi z dolžinami palic, lahko zanemarimo<br />
spremembe kotov pri deformaciji<br />
cos α ′ i,j ≈ cos α i,j , cos β ′ i,j ≈ cos β i,j . (3.8)<br />
Dolžino deformirane palice l ′ i,j lahko zato približno izrazimo s kotoma α i,j in β i,j<br />
l ′ i,j ≈ (X ′ j − X ′ i) cos α i,j + (Y ′<br />
j − Y ′<br />
i ) cos β i,j . (3.9)<br />
Spremembo dolžine palice označimo z ∆l i,j<br />
∆l i,j = l ′ i,j − l i,j . (3.10)<br />
Enačbe (3.3), (3.5) in (3.9) vstavimo v (3.10)<br />
∆l i,j = (X ′ j − X j ) cos α i,j − (X ′ i − X i ) cos α i,j + (Y ′<br />
j − Y j ) cos β i,j − (Y ′<br />
i − Y i ) cos β i,j =<br />
= (u j − u i ) cos α i,j + (v j − v i ) cos β i,j .<br />
(3.11)<br />
Če je paličje obteženo le v vozliščih, je v palici od nič različna le osna sila N x . Normalno napetost σ xx<br />
zaradi osne sile N x izračunamo po enačbi<br />
Pri obravnavanju ravninskega paličja uporabimo oznake<br />
σ xx = N x<br />
A x<br />
. (3.12)<br />
σ i,j = N i,j<br />
A i,j<br />
→ N i,j = σ i,j A i,j , (3.13)<br />
kjer indeksa i in j pomenita številki začetnega in končnega vozlišča palice. Če ima palica konstantni<br />
prečni prerez A i,j , je normalna napetost σ i,j po celi palici konstantna. Vzdolžno deformacijo ε xx v<br />
smeri osi palice označimo z ε i,j , kjer indeksa i in j pomenita številko začetega in končnega vozlišča
3.1 Ravninsko paličje 279<br />
palice. Ker je normalna napetost σ i,j po celi palici konstantna, je konstantna tudi deformacija ε i,j , ki jo<br />
lahko izrazimo s spremembo dolžine palice (glej M. Stanek, G. Turk, Osnove mehanike trdnih teles)<br />
ε i,j = l′ i,j − l i,j<br />
l i,j<br />
= ∆l i,j<br />
l i,j<br />
. (3.14)<br />
Kinematična enačba (3.14) podaja zvezo med deformacijo in pomiki. Zapisati moramo še zvezo med<br />
napetostjo σ i,j in deformacijo ε i,j . Ker obravnavamo primer enoosnega napetostnega stanja, je<br />
ε i,j = σ i,j<br />
E i,j<br />
+ α T i,j ∆T i,j . (3.15)<br />
Upoštevamo torej tudi spremembo temperature palice za ∆T i,j . Na enak način upoštevamo tudi krčenje<br />
materiala (glej M. Stanek, G. Turk, Osnove mehanike trdnih teles). Z E i,j označimo modul elastičnosti<br />
materiala, z α T i,j pa linearni temperaturni razteznostni koeficient za obravnavano palico. Iz enačbe<br />
(3.15) izračunamo napetost σ i,j<br />
σ i,j = E i,j ε i,j − E i,j α T i,j ∆T i,j . (3.16)<br />
V enačbi (3.16) upoštevamo enačbo (3.14)<br />
in enačbo (3.17) vstavimo v (3.13)<br />
σ i,j = E i,j ∆l i,j<br />
l i,j<br />
− E i,j α T i,j ∆T i,j (3.17)<br />
N i,j = E i,j A i,j<br />
l i,j<br />
∆l i,j − E i,j A i,j α T i,j ∆T i,j = k i,j ∆l i,j − E i,j A i,j α T i,j ∆T i,j . (3.18)<br />
S k i,j označimo izraz<br />
k i,j = E i,j A i,j<br />
l i,j<br />
, (3.19)<br />
ki ga imenujemo osna togost palice. Če v enačbi (3.18) upoštevamo enačbo (3.11), izrazimo osno silo v<br />
palici s pomiki<br />
N i,j = k i,j [(u j − u i ) cos α i,j + (v j − v i ) cos β i,j ] − E i,j A i,j α T i,j ∆T i,j . (3.20)<br />
Enačbo (3.20) zapišimo še v matrični obliki<br />
N i,j = k i,j [cos α i,j cos β i,j ]<br />
[<br />
uj − u i<br />
v j − v i<br />
]<br />
− E i,j A i,j α T i,j ∆T i,j . (3.21)
280 3 Metoda pomikov<br />
3.1.2 Ravnotežna pogoja za vozlišče paličja<br />
Da poljubno vozlišče i paličja miruje, morata biti izpolnjena ravnotežna pogoja (slika 3.4)<br />
∑n i<br />
r=1<br />
N i,jr X + F iX = 0,<br />
∑n i<br />
r=1<br />
N i,jr Y + F iY = 0. (3.22)<br />
SLIKA 3.4: V vozlišču i je povezanih n i število palic<br />
Z n i je označeno število palic, ki se stikajo v vozlišču i. N i,jr X in N i,jr Y sta komponenti osne sile palice<br />
z vozliščema i in j r v vozlišču i, F iX in F iY pa komponenti zunanje obtežbe vozlišča i v smereh X in<br />
Y . Enačbi (3.22) zapišimo v matrični obliki<br />
∑n i<br />
[<br />
Ni,jr X<br />
N i,jr Y<br />
r=1<br />
] [ ] [<br />
FiX 0<br />
+ = . (3.23)<br />
F iY 0]<br />
Komponenti osne sile N i,jr X in N i,jr Y izrazimo z velikostjo osne sile N i,jr (slika 3.5)<br />
N i,jr X = N i,jr cos α i,jr , N i,jr Y = N i,jr cos β i,jr . (3.24)<br />
SLIKA 3.5: Silo N i,jr v palici z vozličema i in j r razstavimo v smereh X in Y osi
3.1 Ravninsko paličje 281<br />
Tudi enačbi (3.24) zapišimo v matrični obliki<br />
[<br />
Ni,jr X<br />
N i,jr Y<br />
]<br />
[ ] cos αi,jr<br />
= N i,jr . (3.25)<br />
cos β i,jr<br />
Če enačbo (3.21) vstavimo v (3.25), dobimo (j v enačbi (3.21) zamenjamo z j r )<br />
[<br />
Ni,jr X<br />
N i,jr Y<br />
]<br />
[ ]<br />
[ ]<br />
cos αi,jr<br />
ujr − u<br />
= k i,jr [cos α<br />
cos β i,jr cos β i,jr ]<br />
i<br />
−<br />
i,jr v jr − v i<br />
[ ] cos αi,jr<br />
− E i,jr A i,jr α T i,jr ∆T i,jr .<br />
cos β i,jr<br />
(3.26)<br />
Produkte osne togosti palice k i,jr in smernih kosinusov označimo z matriko [K i,jr ]<br />
[ ]<br />
[<br />
cos αi,jr<br />
cos<br />
[K i,jr ] = k i,jr [cos α<br />
cos β i,jr cos β i,jr ] = k 2 ]<br />
α i,jr cos α i,jr cos β i,jr<br />
i,jr<br />
i,jr cos α i,jr cos β i,jr cos 2 . (3.27)<br />
β i,jr<br />
Vidimo, da je [K i,jr ] simetrična matrika reda 2×2, ki je odvisna le od vrste materiala E i,jr , od geometrijskih<br />
karakteristik palice A i,jr , l i,jr in od njene lege v prostoru α i,jr , β i,jr . Imenujemo jo togostna<br />
matrika palice. Zapišimo še togostno matriko [K jr,i] in pri tem upoštevamo enačbe (3.2)<br />
[<br />
cos<br />
[K jr,i] = k 2 ]<br />
α jr,i cos α jr,i cos β jr,i<br />
jr,i<br />
cos α jr,i cos β jr,i cos 2 = [K<br />
β i,jr ]. (3.28)<br />
jr,i<br />
Vidimo, da sta simetrični matriki [K jr,i] in [K i,jr ] enaki. Enačbo (3.27) vstavimo v (3.26)<br />
[<br />
Ni,jr X<br />
N i,jr Y<br />
V ravnotežni enačbi za vozlišče i (enačba (3.23))<br />
∑n i<br />
r=1<br />
]<br />
[ ]<br />
ujr − u<br />
[K i,jr ]<br />
i<br />
v jr − v i<br />
[ ]<br />
[ ]<br />
ujr − u<br />
= [K i,jr ]<br />
i<br />
cos αi,jr<br />
− E<br />
v jr − v i,jr A i,jr α T i,jr ∆T i,jr . (3.29)<br />
i cos β i,jr<br />
∑n i<br />
−<br />
r=1<br />
Če pomika vozlišča i ločimo od pomikov vozlišč j r , dobimo<br />
∑n i<br />
r=1<br />
[K i,jr ]<br />
[<br />
ujr<br />
v jr<br />
]<br />
∑n i<br />
−<br />
r=1<br />
[ ] [ ]<br />
ui Fix<br />
[K i,jr ] +<br />
v i F iy<br />
[ ] [ ] [ cos αi,jr Fix 0<br />
E i,jr A i,jr α T i,jr ∆T i,jr + = . (3.30)<br />
cos β i,jr F iy 0]<br />
∑n i<br />
−<br />
r=1<br />
Izraz, ki je pomnožen s pomikoma u i in v i , označimo s [K i,i ]<br />
[ ] [ cos αi,jr 0<br />
E i,jr A i,jr α T i,jr ∆T i,jr = . (3.31)<br />
cos β i,jr 0]<br />
∑n i<br />
[K i,i ] = − [K i,jr ], (3.32)<br />
r=1
282 3 Metoda pomikov<br />
člen, v katerem nastopa sprememba temperature ∆T i,jr pa združimo s komponentama F ix in F iy<br />
[ ] [ ]<br />
¯Fix Fix<br />
= ¯F iy F iy<br />
∑n i<br />
−<br />
r=1<br />
[ ] cos αi,jr<br />
E i,jr A i,jr α T i,jr ∆T i,jr . (3.33)<br />
cos β i,jr<br />
Enačba (3.31) dobi zato naslednjo obliko<br />
∑n i<br />
r=1<br />
[ ] [ ] [ ] [<br />
ujr ui ¯Fix 0<br />
[K i,jr ] + [K<br />
v i,i ] + = . (3.34)<br />
jr v i<br />
¯F iy 0]<br />
3.1.3 Ravnotežni pogoji za vsa vozlišča<br />
Celotno paličje je v ravnotežju, če je zadoščeno ravnotežnim enačbam (3.34) za vsa vozlišča paličja.<br />
Sistem ravnotežnih enačb označimo takole:<br />
[ K ][U] + [F ] = [0]. (3.35)<br />
Pri tem vsebuje stolpec [U] komponente pomikov vseh vozlišč konstrukcije, stolpec [F ] pa komponente<br />
zunanje vozliščne obtežbe celotne konstrukcije. Komponente pomikov in obtežbe so izražene glede na<br />
globalni koordinatni sistem X, Y , v katerem konstrukcijo opišemo. Matriko [ K ] imenujemo togostna<br />
matrika konstrukcije.<br />
3.1.4 Sestavljanje togostne matrike konstrukcije<br />
Sestavljanje togostne matrike prikažimo na primeru paličja, ki ga prikazujemo na sliki 3.6.<br />
SLIKA 3.6: Prikazano paličje je sestavljeno iz sedmih elementov in ima pet vozlišč
3.1 Ravninsko paličje 283<br />
Za vsako vozlišče napišemo enačbe (3.34)<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1<br />
¯F 1X<br />
[K 1,1 ] [K 1,2 ] [ ∅ ] [K 1,4 ] [ ∅ ]<br />
v 1<br />
¯F 1Y<br />
[K 2,1 ] [K 2,2 ] [K 2,3 ] [K 2,4 ] [K 2,5 ]<br />
u 2<br />
¯F 2X<br />
v 2<br />
¯F 2Y<br />
[ ∅ ] [K 3,2 ] [K 3,3 ] [ ∅ ] [K 3,5 ]<br />
u 3<br />
v 3<br />
= −<br />
¯F 3X<br />
¯F 3Y<br />
. (3.36)<br />
⎢[K 4,1 ] [K 4,2 ] [ ∅ ] [K 4,4 ] [K 4,5 ]<br />
⎥<br />
u 4<br />
¯F 4X<br />
⎣<br />
⎦<br />
⎢v 4 ⎥ ⎢<br />
¯F 4Y ⎥<br />
[ ∅ ] [K 5,2 ] [K 5,3 ] [K 5,4 ] [K 5,5 ] ⎣u ⎦ ⎣<br />
5<br />
¯F ⎦ 5X<br />
v 5<br />
¯F 5Y<br />
Oznaka [ ∅ ] predstavlja podmatriko velikosti 2 × 2 z vsemi členi enakimi nič<br />
[ ] 0 0<br />
[ ∅ ] = .<br />
0 0<br />
Podmatrike izven diagonale določimo po enačbi (3.27), podmatrike na diagonali pa po enačbi (3.32)<br />
[K 1,1 ] = −([K 1,2 ] + [K 1,4 ]),<br />
[K 2,2 ] = −([K 2,1 ] + [K 2,3 ] + [K 2,4 ] + [K 2,5 ]),<br />
[K 3,3 ] = −([K 3,2 ] + [K 3,5 ]),<br />
[K 4,4 ] = −([K 4,1 ] + [K 4,2 ] + [K 4,5 ]),<br />
[K 5,5 ] = −([K 5,4 ] + [K 5,3 ] + [K 5,4 ]).<br />
(3.37)<br />
Matrika sistema enačb (3.36) je zaradi (3.28) simetrična. Enačb pa ne moremo rešiti, ker je matrika<br />
[ K ] singularna. Če namreč seštejemo vse enačbe sistema (3.36) je vsota enaka nič. Zato enačbe<br />
niso neodvisne in je matrika singularna. Sistem enačb lahko rešimo, če upoštevamo robne pogoje. To<br />
pomeni, da moramo preprečiti, da se paličje premika kot nepodprt sistem togih teles. Enačba (3.36)<br />
predstavlja ravnotežne enačbe za nepodprto paličje, ki se pod vplivom sil pospešeno premika. Zato ne<br />
moremo enolično izračunati pomikov v ravnotežni legi konstrukcije.<br />
3.1.5 Robni pogoji<br />
Nepomično podprta vozlišča<br />
Na sliki 3.7 sta nepomično podprti vozlišči 1 in 3. Paličje je 1-krat statično nedoločeno.
284 3 Metoda pomikov<br />
SLIKA 3.7: Vozlišči 1 in 3 sta nepomično podprti<br />
Za nepomično vozlišče f velja<br />
u f = v f = 0. (3.38)<br />
Pomiki u 1 , v 1 , u 3 in v 3 so znani in so enaki nič. Zato 1., 2., 5. in 6. stolpec matrike v enačbi (3.36)<br />
množimo z nič in jih zato ni treba upoštevati. V ravnotežnih enačbah za 1. in 3. vozlišče nastopajo<br />
neznane reakcije, zato jih pri računu pomikov prostih vozlišč ne moremo uporabiti. Sistem enačb (3.36)<br />
spremenimo po naslednjem postopku: V matriki [ K ] črtamo 1., 2., 5. in 6. stolpec ter 1., 2., 5. in 6.<br />
vrstico. Podobno črtamo v vektorju neznank in vektorju desne strani 1., 2., 5. in 6. člen. Sistem se je<br />
tako zmanjšal za dvakratno število nepomičnih podpor. Sistem enačb za podprto palično konstrukcijo je:<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 2<br />
¯F 2X<br />
[K 2,2 ] [K 2,4 ] [K 2,5 ]<br />
v 2<br />
¯F 2Y<br />
[K<br />
⎢ 4,2 ] [K 4,4 ] [K 4,5 ]<br />
u 4<br />
⎥<br />
⎣<br />
⎦ ⎢v 4<br />
= −<br />
¯F 4X<br />
⎥ ⎢<br />
¯F 4Y<br />
. (3.39)<br />
⎥<br />
[K 5,2 ] [K 5,4 ] [K 5,5 ] ⎣u 5<br />
⎦ ⎣ ¯F 5X<br />
⎦<br />
v 5<br />
¯F 5Y<br />
Reakcije, ki v nepomično podprtih vozliščih nastopajo, lahko izračunamo iz ravnotežnih enačb (3.34),<br />
če upoštevamo, da sta pomika obravnavanega vozlišča enaka nič in če odstranimo podporo in jo nadomestimo<br />
z reakcijama R fx in R fy (R fx in R fy upoštevamo kot zunanji sili)<br />
n f<br />
∑<br />
r=1<br />
[ ] [ ] [ ] [<br />
ujr RfX ¯FfX 0<br />
[K f,jr ] + + = . (3.40)<br />
v jr R fY<br />
¯F fY 0]<br />
n f označuje število palic, ki so v vozlišču f povezane. Za vozlišče 1 na sliki 3.7 dobimo naslednji izraz<br />
za reakciji R 1x in R 1y<br />
[ ] [ ] [ ] [ ]<br />
R1x<br />
u2 u4 ¯F1X<br />
= −[K<br />
R 1,2 ] − [K<br />
1y v 1,4 ] − . (3.41)<br />
2 v 4<br />
¯F 1Y<br />
Podpora dopušča pomik v dani smeri<br />
Vozlišče p je podprto tako, da se lahko premika v smeri premice, podane z enotskim vektorjem ⃗e p oziroma<br />
s kotom α p . Enotski vektor, pravokoten na smer ⃗e p , označimo z ⃗e q . Pri idealno gladki podpori<br />
se smernica reakcije ⃗ R p ujema z vektorjem ⃗e q . Na sliki 3.8 je vozlišče 3 podprto s poševno pomično<br />
podporo.
3.1 Ravninsko paličje 285<br />
SLIKA 3.8: Smer dovoljenega pomika v poševni pomični podpori p je podana z enotskim vektorjem ⃗e p<br />
Enotska vektorja ⃗e p in ⃗e q , reakcijo ⃗ R p in pomik ⃗u p zapišimo glede na bazna vektorja ⃗e X in ⃗e Y<br />
⃗e p = cos α p ⃗e X + cos β p ⃗e Y , ⃗e q = − cos β p ⃗e X + cos α p ⃗e Y ,<br />
⃗R p = | R ⃗ p | ⃗e q = R pX ⃗e X + R pY ⃗e Y , ⃗u p = |⃗u p | ⃗e p = u p ⃗e X + v p ⃗e Y .<br />
(3.42)<br />
Ravnotežni enačbi za vozlišče p dobimo, če upoštevamo enačbi (3.34)<br />
n p<br />
∑<br />
r=1<br />
[ ] [ ] [ ] [ ] [<br />
ujr<br />
up RpX ¯FpX 0<br />
[K p,jr ] + [K<br />
v p,p ] + + = . (3.43)<br />
jr v p R pY<br />
¯F pY 0]<br />
n p označuje število palic v vozlišču p. ¯FpX in ¯F pY sta komponenti zunanje obtežbe v vozlišču p, R pX<br />
in R pY pa komponenti reakcije ⃗ R p v tem vozlišču.<br />
V ravnotežni enačbi za vozlišče p so 4 neznanke: u p , v p , R pX in R pY . Zato moramo upoštevati razen<br />
dveh ravnotežnih enačb še dve dodatni enačbi. To sta pogoj, da je reakcija ⃗ R p pravokotna na smer ⃗e p<br />
⃗R p · ⃗e p = R pX cos α p + R pY cos β p = 0 (3.44)<br />
ter pogoj, da je pomik vozlišča p v smeri enotskega vektorja ⃗e q enak nič<br />
⃗u p · ⃗e q = −u p cos β p + v p cos α p = 0. (3.45)
286 3 Metoda pomikov<br />
Za primer na sliki 3.8 dobimo naslednji sistem enačb:<br />
⎡ ⎤ ⎡<br />
⎡<br />
⎤ u 2<br />
[K 2,2 ] [K 2,3 ] [K 2,4 ] [K 2,5 ] [ ∅ ]<br />
v 2<br />
[K 3,2 ] [K 3,3 ] [ ∅ ] [K 3,5 ] [ I ]<br />
u 3<br />
v 3<br />
[K 4,2 ] [ ∅ ] [K 4,4 ] [K 4,5 ] [ ∅ ]<br />
u 4<br />
v 4<br />
= −<br />
[K 5,2 ] [K 5,3 ] [K 5,4 ] [K 5,5 ] [ ∅ ]<br />
u 5<br />
⎢<br />
⎥<br />
⎣〈 ∅ 〉 〈 ∅ 〉 〈 ∅ 〉 〈 ∅ 〉 cos α 3 cos β 3 ⎦ ⎢ v 5 ⎥ ⎢<br />
⎣<br />
〈 ∅ 〉 − cos β 3 cos α 3 〈 ∅ 〉 〈 ∅ 〉 〈 ∅ 〉 R ⎦ ⎣<br />
3X<br />
R 3Y<br />
Oznaki 〈 ∅ 〉 in [ I ] imata naslednji pomen<br />
〈 ∅ 〉 = 〈 0 0 〉, [ I ] =<br />
¯F 2X<br />
¯F 2Y<br />
¯F 3X<br />
¯F 3Y<br />
¯F 4X<br />
¯F 4Y<br />
¯F 5X<br />
¯F 5Y<br />
0<br />
0<br />
⎤<br />
. (3.46)<br />
⎥<br />
⎦<br />
[ ] 1 0<br />
. (3.47)<br />
0 1<br />
Reakciji v nepomično podprtem vozlišču 1 izračunamo iz enačbe (3.41). Vidimo, da je matrika sistema<br />
enačb (3.46) zaradi poševne podpore nesimetrična. To za reševanje sistema enačb ni ugodno. Temu se<br />
izognemo, če togostno matriko konstrukcije kondenziramo (glej primer 3.3).<br />
Pomična podpora v smeri koordinatne osi<br />
V primeru, ko je cos α p ali cos β p enaka nič, vozlišče dopušča pomik v smeri ene od koordinatnih osi<br />
(slika 3.9).<br />
SLIKA 3.9: Pomična podpora v smeri koordinatne osi<br />
V primeru na sliki 3.9 je<br />
cos α p = 1, cos β p = 0, v p = 0, R pX = 0. (3.48)<br />
Za določitev dveh neznank u p in R pY zadostujeta enačbi, ki ju dobimo, če vrednosti za v p in R pX iz
3.1 Ravninsko paličje 287<br />
enačbe (3.48) vstavimo v ravnotežni enačbi (3.43)<br />
n p<br />
∑<br />
r=1<br />
[ ] [ ] [ ] [ ] [<br />
ujr<br />
up 0 ¯FpX 0<br />
[K p,jr ] + [K<br />
v p,p ] + + =<br />
jr 0 R pY<br />
¯F pY 0]<br />
(3.49)<br />
in dodatnih pogojev ni treba upoštevati. Ker nastopa v stolpcu neznank tudi reakcija v pomičnem vozlišču,<br />
je matrika konstrukcije nesimetrična. Temu se izognemo, če upoštevamo v p = 0 tako, da črtamo<br />
ustrezno vrstico in stolpec ter reakcijo R pY naknadno izračunamo (glej primer 7.2).<br />
Predpisani pomiki vozlišč<br />
Ob delovanju obtežbe na konstrukcijo se zaradi neenakomernih lastnosti temeljnih tal lahko podpore<br />
konstrukcije različno premaknejo. Predpisan pomik vozlišča k označimo z ⃗u k,pr . Predpisana pomika<br />
podpor v vozliščih 1 in 3 na sliki 3.10 označimo z ⃗u 1,pr in ⃗u 3,pr .<br />
SLIKA 3.10: Premika podpor v vozliščih 1 in 3 sta različna<br />
Ker sta premika ⃗u 1,pr in ⃗u 3,pr predpisana, zapišemo ravnotežne enačbe (3.34) le za 2., 4., in 5. vozlišče,<br />
pomike vozlišč 1. in 3. pa zapišemo na desno stran enačbe<br />
⎡ ⎤ ⎡<br />
⎡<br />
⎤ u 2<br />
[K 2,2 ] [K 2,4 ] [K 2,5 ]<br />
v 2<br />
−<br />
[K<br />
⎢ 4,2 ] [K 4,4 ] [K 4,5 ]<br />
u 4<br />
⎥<br />
⎣<br />
⎦ ⎢v 4<br />
=<br />
⎥ ⎢<br />
[K 5,2 ] [K 5,4 ] [K 5,5 ] ⎣u 5<br />
⎦ ⎣<br />
v 5<br />
[ ¯F2X<br />
¯F 2Y<br />
]<br />
− [K 2,1 ]<br />
−<br />
−<br />
[ ¯F4X<br />
[ ]<br />
u1,pr<br />
v 1,pr<br />
]<br />
− [K ¯F 4,1 ]<br />
[ 4Y<br />
] ¯F5X<br />
− [K ¯F 5,3 ]<br />
5Y<br />
[ ]<br />
u3,pr<br />
− [K 2,3 ]<br />
[ ]<br />
v 3,pr<br />
u1,pr<br />
v 1,pr<br />
[ ]<br />
u3,pr<br />
v 3,pr<br />
⎤<br />
. (3.50)<br />
⎥<br />
⎦<br />
Reakcije v podporah 1. in 3. po izvršenem pomiku izračunamo iz ravnotežnega pogoja za 1. in 3.<br />
vozlišče po enačbah (3.34). Če ima vozlišče k predpisan pomik, zanj velja<br />
n k<br />
∑<br />
r=1<br />
[ ] [ ] [ ] [ } [<br />
ujr<br />
uk,pr RkX ¯FkX 0<br />
[K k,jr ] + [K<br />
v k,k ] + + = . (3.51)<br />
jr v k,pr R kY<br />
¯F kY 0]
288 3 Metoda pomikov<br />
Z n pr je označeno število palic v vozlišču pr. Za primer na sliki 3.10 dobimo<br />
[ ]<br />
R1x<br />
R 1y<br />
[ ]<br />
R3x<br />
= −<br />
R 3y<br />
[ ¯F1x<br />
= −<br />
]<br />
− [K ¯F 1,1 ]<br />
1y<br />
[ ] ¯F3x<br />
− [K ¯F 3,2 ]<br />
3y<br />
[<br />
u1pr<br />
v 1pr<br />
]<br />
− [K 1,2 ]<br />
[<br />
u2<br />
v 2<br />
]<br />
− [K 3,3 ]<br />
[<br />
u2<br />
v 2<br />
]<br />
− [K 1,4 ]<br />
[ ]<br />
u3pr<br />
− [K<br />
v 3,5 ]<br />
3pr<br />
[<br />
u4<br />
]<br />
,<br />
v 4<br />
]<br />
.<br />
v 5<br />
[<br />
u5<br />
(3.52)<br />
Ko sistem ravnotežnih enačb za celotno paličje rešimo, dobimo velikost pomikov in reakcij. Notranje<br />
sile v palicah izračunamo po enačbah (3.21).<br />
S prikazano metodo lahko rešujemo tako statično določena kot statično nedoločena ravninska paličja.<br />
3.1.6 Računski primeri<br />
Primer 3.1 Paličje na sliki 3.11 je v vozlišču 1 obteženo z vodoravno silo F = 20 MN. Elastični modul<br />
palic je E = 2 × 10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 . Določimo pomika vozlišča 1,<br />
reakcije v podporah 2 in 3 ter sili v palicah! Dolžina a na sliki 3.11 je a = 2 m.<br />
SLIKA 3.11: Paličje sestavljata dve palici<br />
Stopnjo statične nedoločenosti izračunamo po enačbi †<br />
n = K − 2 v p − r 1 = 2 − 2 · 1 = 0,<br />
kjer je K je število palic, v p je število prostih vozlišč, r 1 pa število pomično podprtih vozlišč. Konstrukcija<br />
je statično določena. Lastnosti palic zapišimo preglednico.<br />
† M. Stanek, G. Turk, Statika I, <strong>Univerza</strong> v <strong>Ljubljani</strong>, 1996.
3.1 Ravninsko paličje 289<br />
PREGLEDNICA 3.1: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j /l i,j<br />
1, 2 2 0 −1 1000<br />
1, 3 2 √ √ √<br />
2 2/2 − 2/2 707<br />
Ob upoštevanju vrednosti iz preglednice 3.1 in enačbe (3.28) lahko zapišemo togostni matriki za palici<br />
[ ] [ ]<br />
0 0 0 0<br />
[ K 1,2 ] = [ K 2,1 ] = 1000 =<br />
0 1 0 1000<br />
[ ] [ ]<br />
1 / 2 −1 / 2 354 −354<br />
[ K 1,3 ] = [ K 3,1 ] = 707<br />
=<br />
−1 / 2 1 / 2 −354 354<br />
Togostno matriko konstrukcije sestavimo s togostnimi matrikami posameznih palic. Za vozlišče 1 zapišemo<br />
(3.34), za vozlišči 2 in 3 pa (3.40)<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1 F<br />
[K 1,1 ] [K 1,2 ] [K 1,3 ]<br />
v 1<br />
0<br />
[K<br />
⎢ 2,1 ] [K 2,2 ] [ ∅ ]<br />
u 2<br />
⎥<br />
⎣<br />
⎦ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
.<br />
⎥<br />
[K 3,1 ] [ ∅ ] [K 3,3 ] ⎣u 3<br />
⎦ ⎣R 3X<br />
⎦<br />
v 3 R 3Y<br />
Podmatrike [K i,i ] so sestavljene iz togostnih matrik posameznih palic in jih izračunamo z enačbami<br />
(3.32)<br />
[K 1,1 ] = −([K 1,2 ] + [K 1,3 ]), [K 2,2 ] = −[K 2,1 ], [K 3,3 ] = −[K 3,1 ],<br />
[ ]<br />
[ ]<br />
[ ]<br />
−354 354<br />
0 0<br />
−354 354<br />
[ K 1,1 ] =<br />
, [ K<br />
354 −1354<br />
2,2 ] =<br />
, [ K<br />
0 −1000<br />
3,3 ] =<br />
.<br />
354 −1354<br />
Zapišimo enačbo konstrukcije:<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 0 0 354 −354 u 1 20<br />
354 −1354 0 1000 −354 354<br />
v 1<br />
0<br />
0 0 0 0 0 0<br />
u 2<br />
⎢ 0 1000 0 −1000 0 0<br />
⎥ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
. (3.53)<br />
⎥<br />
⎣ 354 −354 0 0 −354 354⎦<br />
⎣u 3<br />
⎦ ⎣R 3X<br />
⎦<br />
−354 354 0 0 354 −354 v 3 R 3Y<br />
Matrika v tej enačbi je singularna, kar pomeni, da se konstrukcija pod vplivom obtežbe premika. To je<br />
razumljivo, saj še nismo upoštevali, da so nekateri pomiki preprečeni. Ker so pomiki u 2 , v 2 , u 3 in v 3<br />
enaki nič<br />
u 2 = v 2 = u 3 = v 3 = 0, (3.54)
290 3 Metoda pomikov<br />
pri množenju togostne matrike s stolpcem rešitve ni treba upoštevati zadnjih štirih stolpcev v togostni<br />
matriki. Zadnje štiri enačbe v sistemu uporabimo za račun neznanih reakcij in jih zato ne moremo<br />
uporabiti za račun pomikov u 1 in v 1 . Zato iz sistema enačb (3.53) prepišemo le prvi dve enačbi in<br />
upoštevamo le prva dva stolpca. Togostna matrika konstrukcije sedaj ni singularna. Dobimo sistem<br />
enačb, iz katerega lahko izračunamo neznane pomike:<br />
[ −354 354<br />
354 −1354<br />
] [ ]<br />
u1<br />
v 1<br />
Ta sistem enačb rešimo in izračunamo neznana pomika<br />
[ ] 20<br />
= − .<br />
0<br />
u 1 = 0.0765 m, v 1 = 0.02 m.<br />
Iz zadnjih štirih vrstic v enačbi konstrukcije (3.53) lahko izračunamo tudi reakcije podpor v točkah 2 in<br />
3<br />
− R 2X = 0 u 1 + 0 v 1 → R 2X = 0 MN,<br />
− R 2Y = 0 u 1 + 1000 v 1 → R 2Y = −20 MN,<br />
− R 3X = 354 u 1 − 354 v 1 → R 3X = −20 MN,<br />
− R 3Y = −354 u 1 + 354 v 1 → R 3Y = 20 MN.<br />
Reakcije bi lahko izračunali istočasno z neznanimi pomiki. Pri tem moramo enačbo konstrukcije (3.53)<br />
preoblikovati tako, da upoštevamo znane vrednosti pomikov v vozliščih 2 in 3 (enačba (3.54)), stolpec<br />
neznank pa sestavljajo pomika u 1 , v 1 in reakcije R 2X , R 2Y , R 3X , R 3Y<br />
⎡<br />
⎤ ⎡ ⎡ ⎤<br />
−354 354 0 0 0 0 u 1 −20<br />
354 −1354 0 0 0 0<br />
v 1<br />
0<br />
0 0 1 0 0 0<br />
R 2X<br />
⎢ 0 1000 0 1 0 0⎥<br />
⎢ ⎥ = −<br />
0<br />
⎢ 0⎥<br />
.<br />
⎢<br />
⎣<br />
354 −354 0 0 1 0<br />
−354 354 0 0 0 1<br />
⎤<br />
⎥ ⎢R 2Y ⎥<br />
⎦ ⎣R 3X<br />
⎦<br />
R 3Y<br />
Rešitev tega sistema da enake rezultate za neznane pomike točke 1 in neznane reakcije v točkah 2 in<br />
3. Ta način računa je manj primeren kot prvi, ko smo iz sistema enačb (3.53) črtali vrstice in stolpce.<br />
Sistem, ki ga moramo rešiti je namreč večji, matrika sistema je nesimetrična, kar lahko oteži numerično<br />
reševanje.<br />
Izračunamo osne sile v palicah po enačbi (3.20)<br />
N 1,2 = 1000 [ (0 − 0.0765 ) 0 + (0 − 0.02)(−1) ] = 20 MN,<br />
N 1,3 = 707 [ (0 − 0.0765 ) 0.707 + (0 − 0.02)(−0.707) ] = −28.3 MN.<br />
Sila N 1,2 je natezna, sila N 1,3 pa je tlačna. Za vsako vozlišče paličja bi lahko zapisali ravnotežne enačbe<br />
in ugotovili, ali je ravnotežje zadoščeno. Ker je konstrukcija statično določena, lahko osne sile v palicah<br />
in reakcije izračunamo iz ravnotežnih pogojev in ni treba upoštevati deformiranja konstrukcije. Na sliki<br />
3.12 je prikazana deformirana oblika paličja. Prikazani pomiki so zaradi preglednosti povečani za 10-<br />
krat.<br />
⎢<br />
⎣<br />
0<br />
0<br />
⎥<br />
⎦
3.1 Ravninsko paličje 291<br />
SLIKA 3.12: Deformirana oblika paličja<br />
Primer 3.2 Paličje na sliki 3.13 je obteženo z vodoravno silo F = 20 MN. Elastični modul palic je<br />
E = 2 × 10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 . Določimo pomike vozlišč 1 in 3, reakcije v<br />
podporah 2 in 3 ter sile v palicah! Dolžina a na sliki 3.13 je a = 2 m.<br />
SLIKA 3.13: Paličje sestavljajo tri palice, desna podpora je drsna<br />
Ugotovimo najprej stopnjo statične nedoločenosti konstrukcije (3 palice, 1 prosto in 1 pomično podprto<br />
vozlišče)<br />
n = 3 − 2 · 1 − 1 = 0.<br />
Konstrukcija je statično določena. Lastnosti vseh palic zapišimo v preglednico 3.2.<br />
PREGLEDNICA 3.2: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j<br />
1, 2 2 0 −1 1000<br />
1, 3 2 √ √ √<br />
2 2 / 2 − 2 / 2 707<br />
2, 3 2 1 0 1000
292 3 Metoda pomikov<br />
Togostni matriki za dve palici smo izračunali že pri prejšnji nalogi<br />
[ ] 0 0<br />
[ K 1,2 ] = [ K 2,1 ] = , [ K<br />
0 1000<br />
1,3 ] = [ K 3,1 ] =<br />
Togostno matriko tretje palice pa moramo še izračunati<br />
[ ] 1 0<br />
[ K 2,3 ] = [ K 3,2 ] = 1000 =<br />
0 0<br />
[ ] 1000 0<br />
.<br />
0 0<br />
[ ]<br />
354 −354<br />
.<br />
−354 354<br />
Togostno matriko konstrukcije sestavimo iz togostnih matrik posameznih palic kot pri prejšnji nalogi.<br />
Za vozlišče 1 zapišemo (3.34), za vozlišči 2 (3.40), za vozlišče 3 pa (3.49)<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1 F<br />
[K 1,1 ] [K 1,2 ] [K 1,3 ]<br />
v 1<br />
0<br />
[K<br />
⎢ 2,1 ] [K 2,2 ] [K 2,3 ]<br />
u 2<br />
⎥<br />
⎣<br />
⎦ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
.<br />
⎥<br />
[K 3,1 ] [K 3,2 ] [K 3,3 ] ⎣u 3<br />
⎦ ⎣R 3X<br />
⎦<br />
v 3 R 3Y<br />
Izračunati moramo še podmatrike [K i,i ] (enačba (3.32))<br />
[K 1,1 ] = −([K 1,2 ] + [K 1,3 ]), [K 2,2 ] = −([K 2,1 ] + [K 2,3 ]), [K 3,3 ] = −([K 3,1 ] + [K 3,2 ]),<br />
[ K 1,1 ] =<br />
[ ]<br />
−354 354<br />
, [ K<br />
354 −1354 2,2 ] =<br />
[ ]<br />
−1000 0<br />
, [ K<br />
0 −1000 3,3 ] =<br />
[ ]<br />
−1354 354<br />
.<br />
354 −354<br />
Enačba konstrukcije je:<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 0 0 354 −354 u 1 20<br />
354 −1354 0 1000 −354 354<br />
v 1<br />
0<br />
0 0 −1000 0 1000 0<br />
u 2<br />
⎢ 0 1000 0 −1000 0 0<br />
⎥ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
. (3.55)<br />
⎥<br />
⎣ 354 −354 1000 0 −1354 354⎦<br />
⎣u 3<br />
⎦ ⎣ 0 ⎦<br />
−354 354 0 0 354 −354 v 3 R 3Y<br />
Ker so pomiki u 2 , v 2 in v 3 enaki nič, v enačbi konstrukcije (3.55) črtamo tretjo, četrto in zadnjo vrstico<br />
ter ustrezne stolpce. Tako dobimo enačbo konstrukcije, pri kateri smo upoštevali podpore<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 354 u 1 20<br />
⎣ 354 −1354 −354⎦<br />
⎣v 1<br />
⎦ = − ⎣ 0 ⎦ .<br />
354 −354 −1354 u 3 0<br />
Iz sistema enačb izračunamo neznane pomike<br />
u 1 = 0.0965 m, v 1 = 0.02 m, u 3 = 0.02 m.
3.1 Ravninsko paličje 293<br />
Vidimo, da je pomik u 1 večji od pomika u 1 iz prejšnje naloge. To smo pričakovali, saj smo eno podporo<br />
sprostili. Iz vrstic, ki smo jih prej črtali, lahko izračunamo velikosti reakcij<br />
⎡ ⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
⎤<br />
R 2x<br />
⎣R 2y<br />
⎦ = − ⎣<br />
R 3y<br />
0 0 1000 0.0965 −20<br />
⎦ ⎣ 0.02 ⎦ = ⎣−20⎦ .<br />
0.02 20<br />
0 1000 0<br />
−354 354 354<br />
Tudi pri tej nalogi lahko izračunamo neznane pomike in reakcije iz enačb, ki jih dobimo iz (3.55), če<br />
upoštevamo, da so pomiki u 2 , v 2 in v 3 znani, reakcije R 2X , R 2Y in R 3Y pa neznane<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 0 0 354 0 u 1 20<br />
354 −1354 0 0 −354 0<br />
v 1<br />
0<br />
0 0 1 0 1000 0<br />
R 2X<br />
⎢ 0 1000 0 1 0 0<br />
⎥ ⎢R 2Y<br />
= −<br />
0<br />
⎥ ⎢ 0<br />
.<br />
⎥<br />
⎣ 354 −354 0 0 −1354 0⎦<br />
⎣ u 3<br />
⎦ ⎣ 0 ⎦<br />
−354 354 0 0 354 1 R 3Y 0<br />
Če ta sistem rešimo, dobimo enake rezultate za neznane pomike in reakcije kot prej.<br />
Določimo še osne sile v palicah (enačba (3.20))<br />
N 1,2 = 1000 [ (0 − 0.0965) 0 + (0 − 0.02)(−1) ] = 20 MN,<br />
N 1,3 = 707 [ (0.02 − 0.0965) 0.707 + (0 − 0.02) (−0.707) ] = −28.3 MN,<br />
N 2,3 = 1000 [ (0.02 − 0) 1 ] = 20 MN.<br />
Sili N 1,2 in N 2,3 sta natezni, sila N 1,3 pa je tlačna. Na sliki 3.14 je prikazana deformirana oblika paličja.<br />
SLIKA 3.14: Deformirana oblika paličja<br />
Primer 3.3 Paličje na sliki 3.15 je obteženo z vodoravno silo F = 20 MN. Elastični modul palic je<br />
E = 2 × 10 5 MPa, ploščina prereza palic pa A = 0.01 m 2 . Določimo pomike vozlišč 1 in 2, reakcije v<br />
podporah 2 in 3 ter sile v palicah! Dolžina a na sliki 3.15 je a = 2 m.
294 3 Metoda pomikov<br />
SLIKA 3.15: Vozlišče 3 je podprto s poševno drsno podporo<br />
Konstrukcija je, podobno kot pri prejšnji nalogi, statično določena. Za vse tri palice napišimo preglednico<br />
3.3.<br />
PREGLEDNICA 3.3: Dolžina, smerni kosinusi in osna togost palic<br />
Vozlišči i in j l i,j cos α i,j cos β i,j E i,j A i,j / l i,j<br />
1, 2 2 0 −1 1000<br />
1, 3 2 √ √ √<br />
2 2 / 2 − 2 / 2 707<br />
2, 3 2 1 0 1000<br />
Togostno matriko konstrukcije sestavimo s togostnimi matrikami posameznih palic. Za vozlišče 1 zapišemo<br />
(3.34), za vozlišči 2 (3.40), za vozlišče 3 pa (3.43)<br />
⎡ ⎤ ⎡ ⎤<br />
⎡<br />
⎤ u 1 F<br />
[K 1,1 ] [K 1,2 ] [K 1,3 ]<br />
v 1<br />
0<br />
[K<br />
⎢ 2,1 ] [K 2,2 ] [K 2,3 ]<br />
u 2<br />
⎥<br />
⎣<br />
⎦ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
.<br />
⎥<br />
[K 3,1 ] [K 3,2 ] [K 3,3 ] ⎣u 3<br />
⎦ ⎣R 3X<br />
⎦<br />
v 3 R 3Y<br />
Togostne matrike za vse palice smo izračunali že pri prejšnji nalogi<br />
[ ]<br />
[ ]<br />
0 0<br />
354 −354<br />
[ K 1,2 ] = [ K 2,1 ] = , [ K<br />
0 1000<br />
1,3 ] = [ K 3,1 ] =<br />
,<br />
−354 354<br />
[ ]<br />
[ ]<br />
1000 0<br />
−354 354<br />
[ K 2,3 ] = [ K 3,2 ] = , [ K<br />
0 0<br />
1,1 ] =<br />
,<br />
354 −1354<br />
[ ]<br />
[ ]<br />
−1000 0<br />
−1354 354<br />
[ K 2,2 ] =<br />
, [ K<br />
0 −1000<br />
3,3 ] =<br />
.<br />
354 −354
3.1 Ravninsko paličje 295<br />
Enačba nepodprte konstrukcije je:<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 0 0 354 −354 u 1 20<br />
354 −1354 0 1000 −354 354<br />
v 1<br />
0<br />
0 0 −1000 0 1000 0<br />
u 2<br />
⎢ 0 1000 0 −1000 0 0<br />
⎥ ⎢v 2<br />
= −<br />
R 2X<br />
⎥ ⎢R 2Y<br />
. (3.56)<br />
⎥<br />
⎣ 354 −354 1000 0 −1354 354⎦<br />
⎣u 3<br />
⎦ ⎣R 3X<br />
⎦<br />
−354 354 0 0 354 −354 v 3 R 3Y<br />
Robni pogoji v vozlišču 2 so enaki, kot pri prejšnji nalogi, zato tretjo in četrto vrstico in stolpec črtamo.<br />
Podporo v vozlišču 3 pa upoštevati tako, da sistemu (3.56) dodamo dve enačbi (3.44) in (3.45). Pri tem<br />
upoštevamo, da sta reakciji R 3X in R 3Y neznani<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 354 −354 0 0 u 1 20<br />
354 −1354 −354 354 0 0<br />
v 1<br />
0<br />
354 −354 −1354 354 1 0<br />
u 3<br />
⎢−354 354 354 −354 0 1<br />
⎥ ⎢ v 3<br />
= −<br />
0<br />
⎥ ⎢ 0<br />
.<br />
⎥<br />
⎣ 0 0 0 0 cos α p cos β p<br />
⎦ ⎣R 3X<br />
⎦ ⎣ 0 ⎦<br />
0 0 − cos β p cos α p 0 0 R 3Y 0<br />
Upoštevamo, da je<br />
cos α p = cos 30 ◦ = 0.866, cos β p = sin 30 ◦ = 0.500<br />
in dobimo sistem enačb<br />
⎡<br />
⎤ ⎡ ⎤ ⎡ ⎤<br />
−354 354 354 −354 0 0 u 1 20<br />
354 −1354 −354 354 0 0<br />
v 1<br />
0<br />
354 −354 −1354 354 1 0<br />
u 3<br />
⎢−354 354 354 −354 0 1<br />
⎥ ⎢ v 3<br />
= −<br />
0<br />
⎥ ⎢ 0<br />
, (3.57)<br />
⎥<br />
⎣ 0 0 0 0 0.866 0.5⎦<br />
⎣R 3X<br />
⎦ ⎣ 0 ⎦<br />
0 0 -0.5 0.866 0 0 R 3Y 0<br />
katerega rešitev je<br />
u 1 = 0.0801 m, v 1 = 0.0200 m, u 3 = 0.0085 m, v 3 = 0.0049 m,<br />
R 3X = −11.5 MN,<br />
R 3Y = 20 MN.<br />
Reakcije v vozlišču 2 izračunamo iz druge in tretje enačbe v sistemu (3.56)<br />
− R 2X = 0 u 1 + 0 v 1 + 1000 u 3 + 0 v 3 → R 2X = 8.5 MN,<br />
− R 2Y = 0 u 1 + 1000 v 1 + 0 u 3 + 0 v 3 → R 2Y = 20 MN,<br />
Določimo še osne sile v palicah (enačba (3.20))<br />
N 1,2 = 1000 [ (0 − 0.0801) 0 + (0 − 0.02) (−1) ] = 20 MN,<br />
N 1,3 = 707 [ (0.0085 − 0.0801) 0.707 + (0.0049 − 0.02) (−0.707) ] = −28.3 MN,<br />
N 2,3 = 1000 [ (0.0085 − 0) 1] = 8.5 MN.<br />
Sili N 1,2 in N 2,3 sta natezni, sila N 13 pa je tlačna. Na sliki 3.16 je prikazana deformirana oblika paličja.