Skripta 2. deo - Alas
Skripta 2. deo - Alas
Skripta 2. deo - Alas

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
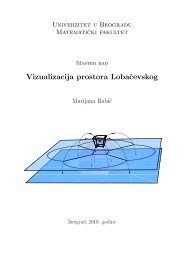
Ovo nam omogućuje da odredimo formule transformacija.<br />
Ako je reper Qf negativne orjentacije, vektor f → 1 ima iste koordinate kao u<br />
prethodnom slučaju, a vektor f → 2 je suprotan onom iz prethodnog slučaja, pa je<br />
[ f → 2 ] e = (sin φ, − cosφ).<br />
→<br />
✻<br />
→<br />
❪<br />
→<br />
e 2<br />
φ + π 2<br />
✙<br />
f 2<br />
→<br />
f<br />
′<br />
2<br />
e 2<br />
→<br />
e1<br />
❫<br />
Q<br />
✻<br />
→<br />
f 1= f → 1<br />
′<br />
✸<br />
❪ φ<br />
✲<br />
→<br />
e 1<br />
O<br />
✲<br />
Slika 9: Izometrijske transformacije koordinata<br />
Ovo razmatranje možemo sumirati sledećom teoremom<br />
Teorema 3.1 Formule transformacija koordinata ravni iz ortonormiranog repera<br />
Oe u ortonormiran reper Qf iste orjentacije su:<br />
( ) ( ) ( ) ( )<br />
x cosφ − sinφ x<br />
′<br />
=<br />
1 q1<br />
y sin φ cosφ x ′ + . (8)<br />
2 q 2<br />
Ukoliko su reperi različitih orjentacija formule su:<br />
( ) ( ) ( x cosφ sin φ x<br />
′<br />
=<br />
1<br />
y sin φ − cosφ x ′ 2<br />
) ( )<br />
q1<br />
+ . (9)<br />
q 2<br />
Formula (8) predstavlja kompoziciju translacije koordinatnog sistema za vektor<br />
(q 1 , q 2 ) i rotacije za ugao φ. Matrica u toj formuli naziva se matrica<br />
rotacije za ugao φ. Formula (9) predstavlja kompoziciju translacije koordinatnog<br />
sistema za vektor (q 1 , q 2 ) i refleksije u odnosu na pravu koja sadrži<br />
tačku Q i gradi ugao od φ 2 u odnosu na vektor → e 1 .<br />
Primetimo da je determinanta prve transformacije jednaka jedan, a druge<br />
transformacije −1, što odgovara činjenici da su baze e i f iste, odnosno različite<br />
orjentacije.<br />
Naime, orjentaciju na vektorskom prostoru je algebarski moguće uvesti na<br />
sledeći način. Ako su e i f baze vektorskog prostora V n kažemo da su one<br />
iste orjentacije ako je det(C e→f ) > 0, gde je C e→f matrica prelaska. Ova<br />
algebarska definicija se poklapa sa intuitivnim definicijama iz poglavlja <strong>2.</strong><strong>2.</strong><br />
3.3 Da li formule<br />
( x<br />
y<br />
)<br />
=<br />
( √3<br />
1<br />
2 2<br />
1<br />
2<br />
− √ 3<br />
2<br />
15<br />
) ( ) ( x<br />
′ 1<br />
y ′ +<br />
−1<br />
⊓⊔<br />
)<br />
. (10)