Рельсовые направляющие качения - на ServoTechnica.Ru!
Рельсовые направляющие качения - на ServoTechnica.Ru!
Рельсовые направляющие качения - на ServoTechnica.Ru!

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
·<br />
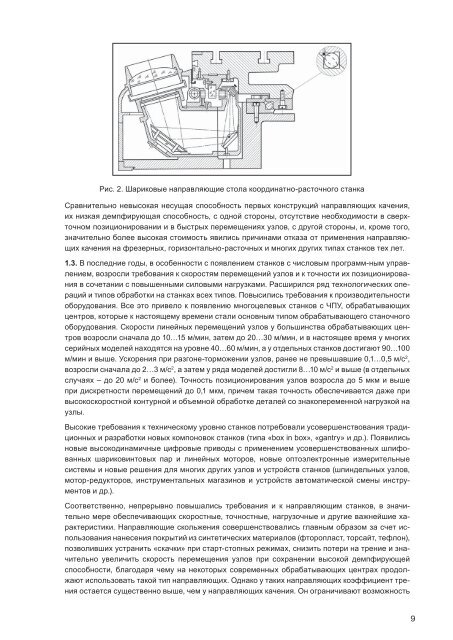
Рис. 2. Шариковые <strong><strong>на</strong>правляющие</strong> стола коорди<strong>на</strong>тно-расточного станка<br />
Сравнительно невысокая несущая способность первых конструкций <strong>на</strong>правляющих <strong>качения</strong>,<br />
их низкая демпфирующая способность, с одной стороны, отсутствие необходимости в сверхточном<br />
позиционировании и в быстрых перемещениях узлов, с другой стороны, и, кроме того,<br />
з<strong>на</strong>чительно более высокая стоимость явились причи<strong>на</strong>ми отказа от применения <strong>на</strong>правляющих<br />
<strong>качения</strong> <strong>на</strong> фрезерных, горизонтально-расточных и многих других типах станков тех лет.<br />
1.3. В последние годы, в особенности с появлением станков с числовым программ-ным управлением,<br />
возросли требования к скоростям перемещений узлов и к точности их позиционирования<br />
в сочетании с повышенными силовыми <strong>на</strong>грузками. Расширился ряд технологических операций<br />
и типов обработки <strong>на</strong> станках всех типов. Повысились требования к производительности<br />
оборудования. Все это привело к появлению многоцелевых станков с ЧПУ, обрабатывающих<br />
центров, которые к <strong>на</strong>стоящему времени стали основным типом обрабатывающего станочного<br />
оборудования. Скорости линейных перемещений узлов у большинства обрабатывающих центров<br />
возросли с<strong>на</strong>чала до 10…15 м/мин, затем до 20…30 м/мин, и в <strong>на</strong>стоящее время у многих<br />
серийных моделей <strong>на</strong>ходятся <strong>на</strong> уровне 40…60 м/мин, а у отдельных станков достигают 90…100<br />
м/мин и выше. Ускорения при разгоне-торможении узлов, ранее не превышавшие 0,1…0,5 м/с 2 ,<br />
возросли с<strong>на</strong>чала до 2…3 м/с 2 , а затем у ряда моделей достигли 8…10 м/с 2 и выше (в отдельных<br />
случаях – до 20 м/с 2 и более). Точность позиционирования узлов возросла до 5 мкм и выше<br />
при дискретности перемещений до 0,1 мкм, причем такая точность обеспечивается даже при<br />
высокоскоростной контурной и объемной обработке деталей со з<strong>на</strong>копеременной <strong>на</strong>грузкой <strong>на</strong><br />
узлы.<br />
Высокие требования к техническому уровню станков потребовали усовершенствования традиционных<br />
и разработки новых компоновок станков (типа «box in box», «gantry» и др.). Появились<br />
новые высокоди<strong>на</strong>мичные цифровые приводы с применением усовершенствованных шлифованных<br />
шариковинтовых пар и линейных моторов, новые оптоэлектронные измерительные<br />
системы и новые решения для многих других узлов и устройств станков (шпиндельных узлов,<br />
мотор-редукторов, инструментальных магазинов и устройств автоматической смены инструментов<br />
и др.).<br />
Соответственно, непрерывно повышались требования и к <strong>на</strong>правляющим станков, в з<strong>на</strong>чительно<br />
мере обеспечивающих скоростные, точностные, <strong>на</strong>грузочные и другие важнейшие характеристики.<br />
Направляющие скольжения совершенствовались главным образом за счет использования<br />
<strong>на</strong>несения покрытий из синтетических материалов (фторопласт, торсайт, тефлон),<br />
позволивших устранить «скачки» при старт-стопных режимах, снизить потери <strong>на</strong> трение и з<strong>на</strong>чительно<br />
увеличить скорость перемещения узлов при сохранении высокой демпфирующей<br />
способности, благодаря чему <strong>на</strong> некоторых современных обрабатывающих центрах продолжают<br />
использовать такой тип <strong>на</strong>правляющих. Од<strong>на</strong>ко у таких <strong>на</strong>правляющих коэффициент трения<br />
остается существенно выше, чем у <strong>на</strong>правляющих <strong>качения</strong>. Он ограничивают возможность<br />
9

![[Instruction] Contents](https://img.yumpu.com/51325878/1/184x260/instruction-contents.jpg?quality=85)