

Tukaj - Zveza radioamaterjev Slovenije
Tukaj - Zveza radioamaterjev Slovenije
Tukaj - Zveza radioamaterjev Slovenije

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
KONSTRUKTORSTVO<br />
LABORATORIJSKI NAPAJALNIK<br />
25<br />
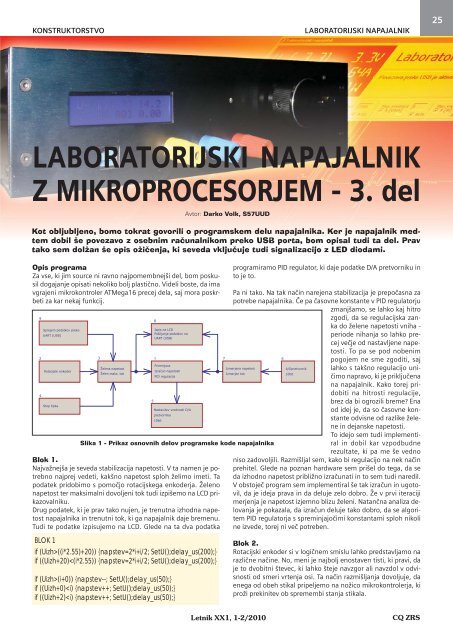
LABORATORIJSKI NAPAJALNIK<br />
Z MIKROPROCESORJEM - 3. del<br />
Avtor: Darko Volk, S57UUD<br />
Kot obljubljeno, bomo tokrat govorili o programskem delu napajalnika. Ker je napajalnik medtem<br />
dobil še povezavo z osebnim računalnikom preko USB porta, bom opisal tudi ta del. Prav<br />
tako sem dolžan še opis ožičenja, ki seveda vključuje tudi signalizacijo z LED diodami.<br />
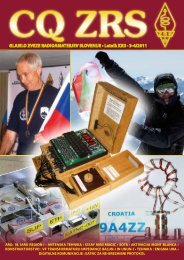
Opis programa<br />
Za vse, ki jim source ni ravno najpomembnejši del, bom poskusil<br />
dogajanje opisati nekoliko bolj plastično. Videli boste, da ima<br />
vgrajeni mikrokontroler ATMega16 precej dela, saj mora poskrbeti<br />
za kar nekaj funkcij.<br />
9<br />
2<br />
4<br />
Sprejem podatkov preko<br />
UART (USB)<br />
Rotacijski enkoder<br />
Stop tipka<br />
3<br />
Želena napetost<br />
Želen maks. tok<br />
Izpis na LCD<br />
Pošiljanje podatkov na<br />
UART (USB)<br />
1<br />
Primerjava<br />
Izračun napetosti<br />
PID regulacija<br />
Nastavitev vrednosti D/A<br />
pretvornika<br />
10bit<br />
Blok 1.<br />
Najvažnejša je seveda stabilizacija napetosti. V ta namen je potrebno<br />
najprej vedeti, kakšno napetost sploh želimo imeti. Ta<br />
podatek pridobimo s pomočjo rotacijskega enkoderja. Želeno<br />
napetost ter maksimalni dovoljeni tok tudi izpišemo na LCD prikazovalniku.<br />
Drug podatek, ki je prav tako nujen, je trenutna izhodna napetost<br />
napajalnika in trenutni tok, ki ga napajalnik daje bremenu.<br />
Tudi te podatke izpisujemo na LCD. Glede na ta dva podatka<br />
5<br />
8<br />
programiramo PID regulator, ki daje podatke D/A pretvorniku in<br />
to je to.<br />
Pa ni tako. Na tak način narejena stabilizacija je prepočasna za<br />
potrebe napajalnika. Če pa časovne konstante v PID regulatorju<br />
zmanjšamo, se lahko kaj hitro<br />
zgodi, da se regulacijska zanka<br />
do želene napetosti vniha -<br />
periode nihanja so lahko precej<br />
večje od nastavljene na petosti.<br />
To pa se pod nobenim<br />
7 6<br />
Izmerjena napetost<br />
Izmerjen tok<br />
Slika 1 - Prikaz osnovnih delov programske kode napajalnika<br />
BLOK 1<br />
if (Uizh>((i*2.55)+20)) {napstev=2*i+i/2; SetU();delay_us(200);}<br />
if ((Uizh+20)(i+0)) {napstev--; SetU();delay_us(50);}<br />
if ((Uizh+0)
![[1] je G0KSC objavil svoj revolucionarni sistem napaja](https://img.yumpu.com/4645487/1/184x260/1-je-g0ksc-objavil-svoj-revolucionarni-sistem-napaja.jpg?quality=85)