Sinteza regulacijskog djelovanja - Fsb
Sinteza regulacijskog djelovanja - Fsb
Sinteza regulacijskog djelovanja - Fsb

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Sinteza</strong> <strong>regulacijskog</strong> d.<br />
FSB<br />
AUTOMATIZACIJA TEHNIČKIH<br />
SUSTAVA<br />
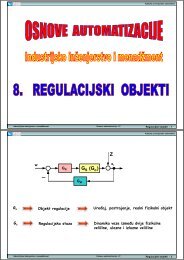
<strong>Sinteza</strong> <strong>regulacijskog</strong> <strong>djelovanja</strong><br />
1
Zahtjevi na reg. djelovanje<br />
Zahtjevi na regulacijsko djelovanje<br />
FSB<br />
stabilnost, točnost, brzina odziva, oscilacije, prebačaj<br />
čvrsta regulacija –<br />
uklanjanje utjecaja poremećaja na<br />
reguliranu veličinu<br />
slijedna regulacija -<br />
regulirana veličina treba slijediti<br />
vodeću veličinu<br />
zahtjevi su često proturječni i rješavaju se kompromisom<br />
(točnost – stabilnost, brzina – prebačaj)<br />
2
Redoslijed sintez e<br />
Redoslijed klasične sinteze<br />
FSB<br />
Upoznavanje s objektom regulacije<br />
(snimanje statičkih i dinamičkih karakteristika)<br />
Definicija zahtjeva nad regulacijom<br />
Odabir mjernog člana, izvršnog člana i regulatora<br />
Podešavanje parametara regulatora tako da zadovoljavaju<br />
uvjete pod 2<br />
3
Metode si nteze<br />
FSB<br />
Klasični pristup sintezi:<br />
Struktura <strong>regulacijskog</strong> kruga odabire se unaprijed,<br />
a tražimo njegove parametre (parametarsko optimiranje).<br />
Rješenje je suboptimalni sustav.<br />
Strukturno optimiranje:<br />
Struktura i parametri <strong>regulacijskog</strong> kruga rezultat su<br />
strukturnog optimiranja (traženje ekstrema zadanog<br />
kriterija).<br />
4
Karaktrist ike<br />
FSB<br />
sinteza servomehanizama se može dobro izvesti jer se<br />
parametri objekata mogu točno odrediti (hidrauličke i<br />
električke veličine).<br />
Najčešće se izvodi u frekvencijskom području.<br />
sinteza procesne regulacije izvodi se pokusima jer je<br />
parametre objekata teško matematiči opisati (toplinski i<br />
kemijski procesi).<br />
Najčešće se izvodi u vremenskom području.<br />
sustave višega reda zamjenjujemo slabo prigušenim<br />
modelom drugoga reda (više frekvencije prolaskom kroz<br />
stvarne sklopove biti će ionako prigušene)<br />
5
Zahtjevi u vremenskom podr.<br />
Zahtjevi u vremenskom području<br />
FSB<br />
x<br />
100%<br />
90%<br />
10%<br />
T P<br />
M P<br />
e 0<br />
T<br />
t<br />
r<br />
T S<br />
6
Djelovanje regulatora<br />
0.08<br />
0.07<br />
0.06<br />
0.05<br />
Djelovanje regulatora<br />
P<br />
proces:<br />
PD<br />
G(<br />
s)<br />
=<br />
( s<br />
1<br />
+ 1)(5s<br />
FSB<br />
+ 1)<br />
Pogreška e<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
0.00<br />
PI<br />
regulator:<br />
PID<br />
digitalni<br />
z=1<br />
K P =19<br />
K I =9.5<br />
K D =4<br />
-0.01<br />
0 1 2 3 4 5 6 7 8 9 10 t<br />
7
Promjena P<br />
FSB<br />
Pogreška e<br />
0.07<br />
0.06<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
10<br />
15<br />
19<br />
25<br />
K P<br />
PID regulator<br />
K I =9.5<br />
K D =4<br />
0.00<br />
-0.01<br />
-0.02<br />
0 1 2 3 4 5 6 7 8 9 10 t<br />
8
Promjena I<br />
FSB<br />
0.07<br />
0.06<br />
0.05<br />
PID regulator<br />
K P =19<br />
K D =4<br />
0.04<br />
K I<br />
Pogreška e<br />
0.03<br />
0.02<br />
0.01<br />
0.00<br />
-0.01<br />
-0.02<br />
5<br />
9.5<br />
12<br />
18<br />
0 1 2 3 4 5 6 7 8 9 10 t<br />
9
Promjena D<br />
FSB<br />
Pogreška e<br />
0.07<br />
0.06<br />
0.05<br />
0.04<br />
0.03<br />
0.02<br />
0.01<br />
2<br />
4<br />
6<br />
8<br />
K D<br />
PID regulator<br />
K P =19<br />
K I =9.5<br />
0.00<br />
-0.01<br />
-0.02<br />
0 1 2 3 4 5 6 7 8 9 10 t<br />
10
Optimiranje IE<br />
Optimiranje<br />
FSB<br />
računa se indeks ponašanja u vremenskom području<br />
traži se ekstrem indeksa (min. ili max.) u višedimenzionalnom<br />
prostoru (dimenzija= broj optimizacijskih parametara + 1)<br />
IE kriterij (Integral of Error)<br />
e<br />
IE<br />
=<br />
∞<br />
∫<br />
0<br />
e( t)dt<br />
t<br />
11
Optimiranje IAE, ITAE<br />
IAE kriterij (Integral of Absolute Error)<br />
⏐e⏐<br />
FSB<br />
IAE<br />
=<br />
∞<br />
∫<br />
0<br />
e( t) dt<br />
t<br />
ITAE kriterij (Integral of Time multiplied by Absolute Error)<br />
t⏐e⏐<br />
ITAE<br />
=<br />
∞<br />
∫<br />
0<br />
t<br />
e( t) dt<br />
t<br />
12
Optimiranje ISE, ostali<br />
FSB<br />
ISE kriterij (Integral of Squared Error)<br />
ISE<br />
I<br />
τ<br />
0<br />
=<br />
∞<br />
∫<br />
0<br />
= ∫ d t<br />
e<br />
2<br />
( t)dt<br />
kriterij najkraćeg prijelaznog vremena (tj. najbržeg procesa)<br />
=<br />
∞<br />
⇒<br />
τ = τ<br />
∫[<br />
2 2<br />
]<br />
e t)<br />
+ ku ( t)<br />
0<br />
( dt<br />
min<br />
kriterij najmanje pogreške uz najmanji utrošak energije<br />
I<br />
13
Tablica pr omjena Kp<br />
FSB<br />
PID regulator (K I =9.5, K D =4), T=20 s<br />
K P<br />
5<br />
7.5<br />
10<br />
15<br />
19<br />
25<br />
30<br />
50<br />
IAE ITAE ISE<br />
0.7825 6.7580 0.0409<br />
0.3784 2.1807 0.0148<br />
0.2273 0.8605 0.0087<br />
0.1237 0.2635 0.0048<br />
0.1053 0.2174 0.0035<br />
0.1052 0.2833 0.0025<br />
0.1051 0.3363 0.0020<br />
0.1030 0.5037 0.0011<br />
14
Tablica pr omjena Ki<br />
FSB<br />
PID regulator (K P =19, K D =4), T=20 s<br />
K I<br />
1<br />
5<br />
9.5<br />
12<br />
18<br />
30<br />
IAE ITAE ISE<br />
0.6326 5.4493 0.0222<br />
0.1993 0.7747 0.0058<br />
0.1053 0.2174 0.0035<br />
0.0925 0.1771 0.0030<br />
0.1031 0.2787 0.0026<br />
0.2032 1.2783 0.0038<br />
15
Tablica pr omjena Kd<br />
FSB<br />
PID regulator (K P =19, K I =9.5), T=20 s<br />
K D<br />
0<br />
2<br />
4<br />
6<br />
8<br />
20<br />
IAE ITAE ISE<br />
0.1329 0.3834 0.0045<br />
0.1077 0.2299 0.0038<br />
0.1053 0.2174 0.0035<br />
0.1053 0.2174 0.0033<br />
0.1053 0.2174 0.0032<br />
0.1253 0.3920 0.0029<br />
16
Zahtjevi u frekv. podr.<br />
Zahtjevi u frekvenskom području<br />
FSB<br />
M<br />
M r<br />
1.0<br />
0.7<br />
ω r<br />
ω<br />
ω b<br />
17
Ziegler-Ni chols<br />
Ziegler – Nicholsova metoda<br />
FSB<br />
Regulator se namjesti na čisto P djelovanje.<br />
Pojačanje K P se povećava do pojave neprigušenih oscilacija,<br />
tj. do granice stabilnosti. Tada se očita kritično<br />
proporcionalno pojačanje K Pkr i kritični period oscilacija T kr .<br />
x<br />
t<br />
T kr<br />
Pomoću tablice namjeste se parametri regulatora.<br />
18
Tablica Z- N<br />
FSB<br />
TIP<br />
REGULATORA<br />
POJAČANJE<br />
K P K I K D<br />
P 0.5 K Pkr 0 0<br />
PI 0.45 K Pkr 0.85 T kr 0<br />
PID 0.60 K Pkr 0.5 T kr 0.12 T kr<br />
19
C-H-Resw ick<br />
FSB<br />
Chien – Hrones - Reswickova metoda<br />
x<br />
τ’ m τ’<br />
t<br />
20
Tablica C- H-R<br />
FSB<br />
TIP<br />
REGULATORA<br />
Aperiodski tijek najkraćeg trajanja<br />
Čvrsta<br />
regulacija<br />
Slijedna<br />
regulacija<br />
20% prebačaja uz najkraći<br />
period oscilacija<br />
Čvrsta<br />
regulacija<br />
Slijedna<br />
regulacija<br />
τ<br />
P K P<br />
0.3<br />
τ m′<br />
′<br />
τ′<br />
0.3<br />
′<br />
τ m<br />
0.7<br />
τ′<br />
′<br />
τ m<br />
0.7<br />
τ′<br />
′<br />
τ m<br />
PI<br />
PID<br />
K P<br />
T I<br />
K P<br />
T I<br />
T D<br />
τ′<br />
0.6<br />
τ′<br />
m<br />
m<br />
τ′<br />
0.35<br />
′<br />
τ m<br />
4τ ′<br />
.2τ ′<br />
τ′<br />
0.95<br />
′<br />
τ m<br />
0.7<br />
τ′<br />
′<br />
τ m<br />
1 m<br />
τ′<br />
0.6<br />
τ′<br />
m<br />
τ′<br />
0.6<br />
′<br />
2.3τ ′ τ′<br />
τ′<br />
1.2<br />
′<br />
τ m<br />
τ m<br />
τ′<br />
0.95<br />
′<br />
τ m<br />
2.4τ m′<br />
τ ′ 2τ m′<br />
1.35τ′<br />
0.42τ m′<br />
0.5τ ′ 0.42τ m′<br />
0.47τ m′<br />
21
Izbor polova<br />
FSB<br />
s<br />
3<br />
2<br />
<strong>Sinteza</strong> regulatora izborom polova<br />
2<br />
+ a s + a s + a<br />
1<br />
0<br />
= 0<br />
− λ1 )( s − λ2)(<br />
s − λ ) =<br />
( s<br />
3<br />
0<br />
a<br />
a<br />
a<br />
2 = −(<br />
λ1<br />
+ λ2<br />
+ λ3)<br />
1<br />
0<br />
= λ λ + λ λ + λ<br />
1<br />
2<br />
= −λ λ<br />
1<br />
2<br />
λ<br />
1<br />
3<br />
3<br />
2<br />
λ<br />
3<br />
22
Primjer PI D na MD<br />
MD sustav (posmični pogon) i PID regulator uz pojačalo K<br />
FSB<br />
D + KK KK KK<br />
x′ ′′ +<br />
D<br />
x′′<br />
+<br />
P<br />
x′<br />
+<br />
I<br />
x<br />
M M M<br />
= 0<br />
D + KK<br />
M<br />
KK<br />
M<br />
KK<br />
M<br />
D<br />
= −( λ1 + λ2<br />
+ λ3 ) ⇒ K D<br />
P<br />
= λ1λ<br />
2 + λ1λ<br />
3 + λ2λ3<br />
⇒ K P<br />
I<br />
= −λ1λ<br />
2λ3<br />
⇒ K I<br />
23