Glavne osi tenzora inercije
Glavne osi tenzora inercije
Glavne osi tenzora inercije

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
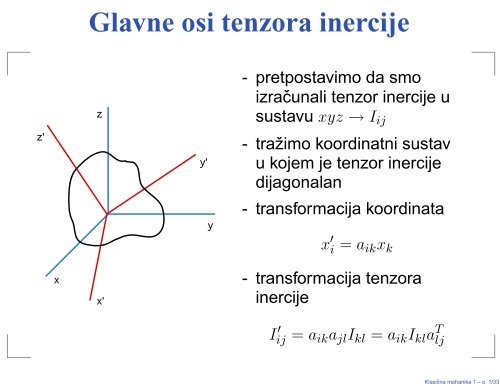
<strong>Glavne</strong> <strong>osi</strong> <strong>tenzora</strong> <strong>inercije</strong><br />
- pretpostavimo da smo<br />
izračunali tenzor <strong>inercije</strong> u<br />
sustavu xyz → Iij<br />
- tražimo koordinatni sustav<br />
u kojem je tenzor <strong>inercije</strong><br />
dijagonalan<br />
- transformacija koordinata<br />
x ′ i = aikxk<br />
- transformacija <strong>tenzora</strong><br />
<strong>inercije</strong><br />
I ′ ij = aikajlIkl = aikIkla T lj<br />
Klasična mehanika 1 – p. 1/33
- matrični zapis: a · I · a T = I ′<br />
a T · a · I · a T = a T · I ′<br />
Iija T jk = aT ijI ′ jk<br />
Iija T jk = aT ijI ′ jδjk<br />
Iija T jk = I′ k aT ik<br />
- matrica aT se sastoji od tri stupca<br />
⎛<br />
a T =<br />
⎜<br />
⎝<br />
a11 a21 a31<br />
a12 a22 a32<br />
a13 a23 a33<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 2/33
- jednadžba<br />
Iija T jk = I′ k aT ik k = 1, 2, 3<br />
predstavlja tri eigenvalue jednadžbe<br />
I · vk = I ′ k vk k = 1, 2, 3<br />
gdje vk označava k-ti stupac matrice a T<br />
- dobili smo homogeni 3 × 3 sustav jednadžbi<br />
(I − I ′ k )vk = 0<br />
- da bi postojalo rješenje determinanta sustava mora<br />
iščezavati<br />
Klasična mehanika 1 – p. 3/33
- sekularna jednadžba<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
I11 − I ′ k I12 I13<br />
I21 I22 − I ′ k I23<br />
I31 I32 I33 − I ′ k<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
= 0<br />
- rješavanje gornje jednadžbe daje momente <strong>inercije</strong> I ′ k<br />
- iz jednadžbe<br />
(I − I ′ k )vk = 0<br />
možemo izračunati stupce matrice transformacije a T<br />
Klasična mehanika 1 – p. 4/33
- na kraju računamo jedinične vektore sustava u kojem je<br />
tenzor <strong>inercije</strong> dijagonalan<br />
�e ′ i<br />
= aik�ek<br />
- takve <strong>osi</strong> zovemo glavne <strong>osi</strong> <strong>tenzora</strong> <strong>inercije</strong><br />
- ako tijelo ima os simetrije, ta os je ujedno i jedna od<br />
glavnih <strong>osi</strong> tijela<br />
Klasična mehanika 1 – p. 5/33
Zadatak 30<br />
Kruto tijelo se sastoji od masa 2m, m i 4m smještenih u<br />
točkama (−1, −1, 1), (2, 0, 2) i (−1, 1, 0). Na ¯dite smjerove<br />
glavnih <strong>osi</strong> i momente tromosti oko njih.<br />
Rješenje:<br />
- tenzor tromosti smo izračunali u prethodnom zadatku<br />
⎛<br />
12m<br />
⎜<br />
I = ⎝ 2m<br />
2m<br />
16m<br />
⎞ ⎛<br />
−2m<br />
⎟ ⎜<br />
2m ⎠ = 2m⎝<br />
6<br />
1<br />
⎞<br />
1 −1<br />
⎟<br />
8 1 ⎠<br />
−2m 2m 16m<br />
−1 1 8<br />
- prvi korak je računanje svojstvenih vrijednosti <strong>tenzora</strong><br />
tromosti<br />
Klasična mehanika 1 – p. 6/33
- sekularna jednadžba<br />
�<br />
�<br />
� 6 − λ<br />
�<br />
� 1<br />
�<br />
� −1<br />
1<br />
8 − λ<br />
1<br />
−1<br />
1<br />
8 − λ<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
= 0<br />
(6 − λ) � (8 − λ) 2 − 1 � − [8 − λ + 1] − [1 + 8 − λ] = 0<br />
(6 − λ)(7 − λ)(9 − λ) − 2(9 − λ) = 0<br />
(9 − λ) [(6 − λ)(7 − λ) − 2] = 0<br />
- slijede tri svojstvene vrijednosti<br />
λ1 = 9(I1 = 18m) λ2 = 8(I2 = 16m) λ3 = 5(I3 = 10m)<br />
Klasična mehanika 1 – p. 7/33
Prva svojstvena vrijednost: λ1 = 9<br />
⎛<br />
⎜<br />
⎝<br />
6<br />
1<br />
⎞⎛<br />
⎞ ⎛<br />
1 −1 v1<br />
⎟⎜<br />
⎟ ⎜<br />
8 1 ⎠⎝<br />
v2 ⎠ = 9⎝<br />
−1 1 8<br />
−3v1 + v2 − v3 = 0<br />
v1 − v2 + v3 = 0<br />
−v1 + v2 − v3 = 0<br />
⎛ ⎞<br />
⎜<br />
⎝<br />
a11<br />
a12<br />
a13<br />
⎫<br />
⎪⎬<br />
v3<br />
v1<br />
v2<br />
v3<br />
⎞<br />
⎟<br />
⎠<br />
⎪⎭ =⇒ v1 = 0, v2 = v3<br />
⎟<br />
⎠ = 1 √ 2<br />
⎛<br />
⎜<br />
⎝<br />
0<br />
1<br />
1<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 8/33
Druga svojstvena vrijednost: λ2 = 8<br />
⎛<br />
⎜<br />
⎝<br />
6<br />
1<br />
⎞⎛<br />
⎞ ⎛<br />
1 −1 v1<br />
⎟⎜<br />
⎟ ⎜<br />
8 1 ⎠⎝<br />
v2 ⎠ = 8⎝<br />
−1 1 8<br />
−2v1 + v2 − v3 = 0<br />
v1 + v3 = 0<br />
−v1 + v2 = 0<br />
⎛ ⎞<br />
⎜<br />
⎝<br />
a21<br />
a22<br />
a23<br />
⎫<br />
⎪⎬<br />
v3<br />
v1<br />
v2<br />
v3<br />
⎞<br />
⎟<br />
⎠<br />
⎪⎭ =⇒ v1 = v2, v1 = −v3<br />
⎟<br />
⎠ = 1 √ 3<br />
⎛<br />
⎜<br />
⎝<br />
1<br />
1<br />
−1<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 9/33
Treća svojstvena vrijednost: λ3 = 5<br />
⎛<br />
⎜<br />
⎝<br />
6<br />
1<br />
⎞⎛<br />
⎞ ⎛<br />
1 −1 v1<br />
⎟⎜<br />
⎟ ⎜<br />
8 1 ⎠⎝<br />
v2 ⎠ = 5⎝<br />
−1 1 8<br />
⎫<br />
v1 + v2 − v3 = 0 ⎪⎬<br />
v1 + 3v2 + v3 = 0<br />
⎪⎭<br />
−v1 + v2 + 3v3 = 0<br />
=⇒ v2 = −v3, v1 = −2v2<br />
⎛ ⎞<br />
a31<br />
⎜ ⎟<br />
⎝ a32 ⎠ = 1 ⎛ ⎞<br />
−2<br />
⎜ ⎟<br />
√ ⎝ 1 ⎠<br />
6<br />
−1<br />
a33<br />
v3<br />
v1<br />
v2<br />
v3<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 10/33
Osi sustava u kojem je tenzor dijagonalan (glavne <strong>osi</strong><br />
<strong>tenzora</strong> <strong>inercije</strong>)<br />
�e ′ 1 = a1k�ek = 1 √ 2 (�j + � k)<br />
�e ′ 2 = a2k�ek = 1 √ 3 (�i +�j − � k)<br />
�e ′ 3 = a3k�ek = 1 √ 6 (−2�i +�j − � k)<br />
Momenti <strong>inercije</strong> oko glavnih <strong>osi</strong><br />
I1 = 18m I2 = 16m I3 = 10m<br />
Klasična mehanika 1 – p. 11/33
Steinerov teorem<br />
- povezuje tenzore <strong>inercije</strong> u dva sustava s paralelnim<br />
<strong>osi</strong>ma od kojih jedan ima ishodište u centru mase tijela<br />
I ′ ik = � m � �x ′2 δik − x ′ ix ′ � �<br />
k = m<br />
Osi dva sustava su paralelne<br />
�r ′ = �r +�a<br />
x ′ i = xi + ai<br />
� �<br />
l<br />
x ′2<br />
l δik − x ′ ix ′ k<br />
�<br />
Klasična mehanika 1 – p. 12/33
Uvrštavamo transformaciju x ′ i = xi + ai<br />
�<br />
�<br />
I ′ ik = � m<br />
= � m<br />
l<br />
� �<br />
(xl + al) 2 δik − (xi + ai)(xk + ak)<br />
(x 2 l + 2xlal + a 2 l )δik − xixk − aixk − xiak − aiak<br />
l<br />
= � m � �x 2 � �<br />
2<br />
δik − xixk + m(�a δik − aiak)<br />
+ 2 �<br />
l<br />
al<br />
� mxlδik − ai<br />
� mxk − ak<br />
� mxi<br />
- sustav xyz ima ishodište u centru mase pa zadnja tri<br />
člana iščezavaju<br />
�<br />
Klasična mehanika 1 – p. 13/33
Steinerov teorem:<br />
I ′ ik = Iik + µ(�a 2 δik − aiak) ,<br />
gdje µ označava ukupnu masu krutog tijela<br />
Primjer:<br />
Pomak ishodišta: �a = −a � k<br />
I ′ 11 = I11 + µa 2<br />
I ′ 22 = I22 + µa 2<br />
I ′ 33 = I33<br />
Klasična mehanika 1 – p. 14/33
Zadatak 31<br />
Na ¯dite momente <strong>inercije</strong> oko glavnih <strong>osi</strong> kroz centar mase<br />
sljedećih homogenih tijela mase m<br />
- tanki štap duljine l<br />
- kugla polumjera R<br />
- valjak polumjera R i visine h<br />
- kvadar stranica a, b i c<br />
- stožac polumjera baze R i visine h<br />
Klasična mehanika 1 – p. 15/33
- tanki štap duljine l → linijska gustoća: λ = m/l<br />
Ix =<br />
Iy =<br />
� l/2<br />
(y<br />
−l/2<br />
2 + z 2 � l/2<br />
)λdz = λ<br />
−l/2<br />
� l/2<br />
(x<br />
−l/2<br />
2 + z 2 � l/2<br />
)λdz = λ<br />
−l/2<br />
- štap je tanak<br />
→ x = y = 0 → Iz = 0<br />
- ovakvo tijelo ima 5, a ne 6<br />
stupnjeva slobode<br />
- rotacija oko smjera štapa<br />
gubi smisao<br />
z 2 dz = 1<br />
12 λl3 = 1<br />
12 ml2<br />
z 2 dz = 1<br />
12 λl3 = 1<br />
12 ml2<br />
Klasična mehanika 1 – p. 16/33
- kugla radijusa R: gustoća ρ = m/V<br />
I = 2<br />
3 ρ<br />
� R<br />
0<br />
� π<br />
0<br />
� 2π<br />
= 4π 2<br />
3 ρR5<br />
5 = 8πR5ρ 15<br />
0<br />
- sferna simetrija<br />
Ix = Iy = Iz ≡ I<br />
- jednostavnije je računati<br />
�<br />
3I = 2 ρ � x 2 + y 2 + z 2� dV<br />
r 2 r 2 sin θdφdθdr = 4π 2<br />
3 ρ<br />
� R<br />
0<br />
= 2<br />
5 mR2<br />
r 4 dr<br />
Klasična mehanika 1 – p. 17/33
- valjak radijusa R i visine h: gustoća ρ = m/V<br />
2I = ρ<br />
� R<br />
0<br />
� h/2<br />
−h/2<br />
� 2π<br />
0<br />
- osna simetrija<br />
Ix = Iy ≡ I<br />
- jednostavnije je računati<br />
�<br />
2I = ρ � x 2 + y 2 + 2z 2� dV<br />
(r 2 ⊥ + 2z2 )r⊥dr⊥dzdφ<br />
Klasična mehanika 1 – p. 18/33
� R<br />
2I = 2πhρ<br />
0<br />
r 3 ⊥ dr⊥ + 4πρ<br />
= 2πhρ 1<br />
4 R4 + 4πρ R2<br />
2<br />
Ix = Iy = m<br />
4<br />
Iz =<br />
�<br />
= 2πhρ<br />
�<br />
R 2 + 1<br />
3 h2<br />
� R<br />
0<br />
� h/2<br />
−h/2<br />
h3 12 = πR2 �<br />
R2 hρ<br />
2<br />
�<br />
ρ(x 2 + y 2 � R � h/2<br />
)dV = ρ<br />
0 −h/2<br />
� R<br />
r<br />
0<br />
3 ⊥dr⊥ = 2πh R4<br />
4<br />
� 2π<br />
0<br />
ρ = 1<br />
2 mR2<br />
z 2 r⊥dr⊥dz<br />
1<br />
+<br />
6 h2<br />
�<br />
r 3 ⊥ dr⊥dzdφ<br />
Klasična mehanika 1 – p. 19/33
- kvadar stranica a, b i c: gustoća ρ = m/V<br />
Ix = ρ<br />
+ ρ<br />
Ix =<br />
� a/2<br />
−a/2<br />
� a/2<br />
−a/2<br />
�<br />
= ρ<br />
dx<br />
dx<br />
ρ(y 2 + z 2 )dV<br />
� a/2<br />
−a/2<br />
� b/2<br />
−b/2<br />
� b/2<br />
−b/2<br />
� b/2<br />
−b/2<br />
y 2 dy<br />
dy<br />
� c/2<br />
� c/2<br />
−c/2<br />
−c/2<br />
� c/2<br />
−c/2<br />
dz<br />
z 2 dz<br />
(y 2 + z 2 )dxdydz<br />
Klasična mehanika 1 – p. 20/33
Ix = ρa b3<br />
c + ρabc3<br />
12 12<br />
= m � 2 2<br />
b + c<br />
12<br />
�<br />
Iy = m � 2 2<br />
a + c<br />
12<br />
�<br />
Iz = m � 2 2<br />
a + b<br />
12<br />
�<br />
= abc<br />
12 ρ� b 2 + c 2�<br />
Klasična mehanika 1 – p. 21/33
- stožac radijusa baze R i visine h: gustoća ρ = m/V<br />
Centar mase stošca je na z-<strong>osi</strong><br />
zcm = 1<br />
m<br />
�<br />
zρdV = ρ<br />
m<br />
� 2π<br />
0<br />
� h<br />
0<br />
� z tanα<br />
0<br />
zr⊥dr⊥dzdφ<br />
Klasična mehanika 1 – p. 22/33
zcm = ρ<br />
m 2π<br />
= ρ<br />
m<br />
� h<br />
0<br />
R 2 πh<br />
3<br />
z 3 tan 2 α<br />
2<br />
= ρ<br />
m π tan2 α h4<br />
4<br />
3<br />
4R2h3 tan 2 α = 3<br />
4 h<br />
- tenzor <strong>inercije</strong> računamo u sustavu x ′ y ′ z ′<br />
- koristeći Steinerov teorem prelazimo u sustav xyz<br />
Iz ′ =<br />
�<br />
= 2πρ<br />
ρ(x ′2 + y ′2 � 2π<br />
)dV = ρ<br />
� h<br />
0<br />
z ′4 tan 4 α<br />
4<br />
0<br />
� h<br />
0<br />
� z ′ tanα<br />
0<br />
= 2πρ tan 4 α h5<br />
20<br />
r 2 ⊥ r⊥dr⊥dz ′ dφ<br />
= 3<br />
10 mR2<br />
Klasična mehanika 1 – p. 23/33
- osna simetrija: Ix ′ = Iy ′ ≡ I<br />
- jednostavnije je računati Ix ′ + Iy ′ = 2I<br />
I = 1<br />
2<br />
= ρ<br />
2<br />
= ρπ<br />
�<br />
ρ(x ′2 + y ′2 + 2z ′2 )dV = ρ<br />
�<br />
(x<br />
2<br />
′2 + y ′2 �<br />
)dV + ρ<br />
� 2π � h � ′<br />
z tan α<br />
(r 2 ⊥ + 2z′2 )r⊥dr⊥dz ′ dφ<br />
0<br />
� h<br />
0<br />
0<br />
0<br />
z ′4 tan 4 α<br />
4<br />
= ρπ h5 tan 4 α<br />
20<br />
+ 2ρπ<br />
� h<br />
0<br />
+ 2ρπ h5 tan 2 α<br />
10<br />
z ′2 tan 2 α<br />
2<br />
= ρ R2 πh<br />
3<br />
z ′2 dz<br />
�<br />
3<br />
20 R2 + 3<br />
5 h2<br />
�<br />
z ′2 dV<br />
Klasična mehanika 1 – p. 24/33
Ix ′ = Iy ′ = 3m<br />
5<br />
� R 2<br />
4<br />
+ h2<br />
Vektor od ishodišta sustava x ′ y ′ z ′ do centra mase<br />
Steinerov teorem:<br />
Iz = Iz ′<br />
�a = (0, 0, 3<br />
4 h)<br />
Ix = Ix ′ − ma 2 = 3<br />
20 m<br />
Iy = Iy ′ − ma 2 = 3<br />
20 m<br />
�<br />
�<br />
R 2 + h2<br />
4<br />
�<br />
R 2 + h2<br />
4<br />
�<br />
�<br />
Klasična mehanika 1 – p. 25/33
Zadatak 32<br />
Na ¯dite smjerove glavnih <strong>osi</strong> i momente oko njih s obzirom<br />
na točku O ′ za valjak radijusa d, visine d √ 3 i mase m.<br />
Pokažite da jedna glavna os prolazi kroz centar mase.<br />
Rješenje:<br />
- vektor od O ′ do C.M.<br />
� √ �<br />
3<br />
�a = 0,d,d<br />
2<br />
Ic.m. =<br />
⎛<br />
⎜<br />
⎝<br />
1<br />
2 md2 0 0<br />
0 1 2 md 2 0<br />
0 0 1 2 md 2<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 26/33
Koristeći Steinerov teorem možemo prijeći u sustav x ′ y ′ z ′<br />
Dijagonalni članovi:<br />
I ′ xx = Ixx + m � �a 2 − a 2� 1<br />
x =<br />
I ′ jk = Ijk + m � �a 2 �<br />
δjk − ajak<br />
I ′ yy = Iyy + m � �a 2 − a 2 � 1<br />
y =<br />
2 md2 + m<br />
I ′ zz = Izz + m � �a 2 − a 2� 1<br />
z =<br />
2 md2 + m<br />
2 md2 �<br />
7<br />
+ m<br />
4 d2 �<br />
− 0 = 9<br />
4 md2<br />
�<br />
7<br />
4 d2 − d 2<br />
�<br />
= 5<br />
4 md2<br />
�<br />
7<br />
4 d2 − 3<br />
4 d2<br />
�<br />
= 3<br />
2 md2<br />
Klasična mehanika 1 – p. 27/33
Nedijagonalni članovi:<br />
Tenzor u sustavu x ′ y ′ z ′<br />
⎛<br />
⎜<br />
⎝<br />
9<br />
4 md2 0 0<br />
I ′ xy = Ixy − maxay = 0<br />
I ′ xz = Ixz − maxaz = 0<br />
I ′ yz = Iyz − mayaz = −<br />
5 0 4md2 √<br />
3<br />
− 2 md2<br />
√<br />
3<br />
0 − 2 md2 3 2ma2 ⎞<br />
⎟<br />
⎠ = md2<br />
4<br />
√ 3<br />
2 d2<br />
⎛<br />
⎜<br />
⎝<br />
9 0 0<br />
0 5 −2 √ 3<br />
0 −2 √ 3 6<br />
⎞<br />
⎟<br />
⎠<br />
Klasična mehanika 1 – p. 28/33
Sekularna jednadžba:<br />
�<br />
�<br />
� 9 − λ 0 0<br />
�<br />
� 0 5 − λ −2<br />
�<br />
�<br />
√ 3<br />
0 −2 √ �<br />
�<br />
�<br />
�<br />
�<br />
�<br />
3 6 − λ �<br />
Tri svojstvene vrijednosti:<br />
= 0 =⇒ (9−λ) [(5 − λ)(6 − λ) − 12] = 0<br />
λ1 = 2 , λ2 = 9 , λ3 = 9<br />
Momenti <strong>inercije</strong> oko glavnih <strong>osi</strong>:<br />
I1 = 1<br />
2 md2 , I2 = 9<br />
4 md2 , I3 = 9<br />
4 md2<br />
Klasična mehanika 1 – p. 29/33
Prva svojstvena vrijednost: λ1 = 2<br />
⎛<br />
9 0 0<br />
⎜<br />
⎝ 0 5 −2 √ 3<br />
0 −2 √ ⎞⎛<br />
⎟⎜<br />
⎠⎝<br />
3 6<br />
7v1 = 0<br />
3v2 − 2 √ 3v3 = 0<br />
−2 √ 3v2 + 4v3 = 0<br />
⎛ ⎞<br />
⎜<br />
⎝<br />
a11<br />
a12<br />
a13<br />
⎫<br />
⎪⎬<br />
v1<br />
v2<br />
v3<br />
⎞<br />
⎟<br />
⎠ = 2<br />
⎛<br />
⎜<br />
⎝<br />
⎪⎭ =⇒ v1 = 0, v3 =<br />
⎟<br />
⎠ = 2 √ 7<br />
⎛<br />
⎜<br />
⎝<br />
0<br />
1<br />
√ 3/2<br />
⎞<br />
⎟<br />
⎠<br />
v1<br />
v2<br />
v3<br />
⎞<br />
⎟<br />
⎠<br />
√ 3<br />
2 v2<br />
Klasična mehanika 1 – p. 30/33
Odgovarajuća glavna os<br />
�n1 = 2 √ 7<br />
�<br />
prolazi kroz centar mase valjka<br />
�j +<br />
C.M. = (0,d,<br />
√<br />
3<br />
2 � �<br />
k<br />
√ 3<br />
2 d)<br />
Klasična mehanika 1 – p. 31/33
Druga i treća svojstvena vrijednost su jednake: I2 = I3 = 9<br />
⎛<br />
9 0 0<br />
⎜<br />
⎝ 0 5 −2 √ 3<br />
0 −2 √ ⎞⎛<br />
⎞ ⎛ ⎞<br />
v1 v1<br />
⎟⎜<br />
⎟ ⎜ ⎟<br />
⎠⎝<br />
v2 ⎠ = 9⎝<br />
v2 ⎠<br />
3 6<br />
−4v2 − 2 √ 3v3 = 0<br />
−2 √ 3v2 − 3v3 = 0<br />
�<br />
v3<br />
=⇒ v2 = −<br />
v3<br />
√ 3<br />
2 v3<br />
- izbor odgovarajućih glavnih <strong>osi</strong> je proizvoljan<br />
- glavne <strong>osi</strong> → desni ortonormirani sustav<br />
- za drugu glavnu os možemo izabrati<br />
v2 = v3 = 0,v1 = 1<br />
Klasična mehanika 1 – p. 32/33
Druga glavna os<br />
Treća glavna os<br />
�n3 = 2 √ 7<br />
�n2 =�i<br />
�√<br />
3<br />
2 �j − � �<br />
k<br />
<strong>Glavne</strong> <strong>osi</strong> �n1,�n2,�n3 čine desni ortonormirani sustav.<br />
Klasična mehanika 1 – p. 33/33