B - dziewiecki@pr.radom.pl
B - dziewiecki@pr.radom.pl
B - dziewiecki@pr.radom.pl

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Mechanika Techniczna<br />
wykład 8<br />
Metody wyznaczania przyspieszenia<br />
w ruchu płaskim<br />
przykłady<br />
Click here to get your free novaPDF Lite registration key
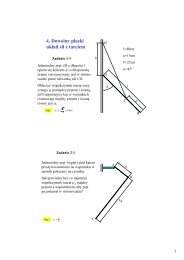
Przykład 1<br />
Cienki pręt o długości l opiera się końcem A o podłogę, zaś końcem B<br />
o prostopadłą do niej ścianę. W położeniu pokazanym na rysunku,<br />
określonym przez kąt , koniec A pręta posiada prędkość A<br />
oraz<br />
przyspieszenie a A<br />
. Wyznaczyć przyspieszenie a B<br />
końca B.<br />
B<br />
l<br />
<br />
A<br />
<br />
A<br />
a A<br />
Click here to get your free novaPDF Lite registration key
a<br />
B / A<br />
<br />
<br />
O<br />
y<br />
B<br />
<br />
a<br />
B / A<br />
a B<br />
<br />
<br />
a A<br />
<br />
l<br />
<br />
<br />
a<br />
B<br />
aA<br />
aB<br />
/ A<br />
aB<br />
/ A<br />
<br />
2<br />
aB<br />
/ A<br />
l aB<br />
/ A<br />
<br />
wektor<br />
a A<br />
<br />
a<br />
B / A<br />
<br />
a<br />
a B / A<br />
B<br />
i a<br />
l sin<br />
cos<br />
<br />
j<br />
0<br />
l cos<br />
A<br />
<br />
l<br />
<br />
<br />
Rozwiązanie<br />
metoda superpozycji<br />
<br />
2 l sin<br />
0 aB<br />
l<br />
<br />
A<br />
a <br />
A<br />
<br />
A<br />
2<br />
0 aA<br />
l sin<br />
l cos<br />
<br />
2<br />
<br />
aB<br />
0 l cos<br />
<br />
l sin<br />
<br />
a<br />
B<br />
x<br />
z poprzedniego rozwiązania<br />
(wykład 7, przykład 1)<br />
<br />
A<br />
<br />
l sin<br />
a<br />
<br />
2<br />
aA<br />
<br />
A<br />
<br />
3<br />
tan<br />
l sin <br />
A<br />
2<br />
l cos<br />
l sin<br />
Click here to get your free novaPDF Lite registration key
Przykład 2<br />
Krążek o promieniu r toczy się w jednej płaszczyźnie bez poślizgu po<br />
płaskiej powierzchni w ten sposób, że w danej chwili prędkość jego<br />
środka równa jest 0<br />
, zaś przyspieszenie a 0<br />
. Wyznaczyć przyspieszenia<br />
punktów A, B, C, D krążka.<br />
B<br />
r<br />
A<br />
O<br />
0<br />
a 0<br />
C<br />
D<br />
Click here to get your free novaPDF Lite registration key
Rozwiązanie<br />
Prędkość kątowa krążka (wykład 7, przykład 2)<br />
<br />
<br />
a<br />
A / O<br />
A<br />
<br />
<br />
a<br />
A / O<br />
r<br />
a 0<br />
a <br />
A<br />
<br />
<br />
a<br />
B / O<br />
O<br />
0<br />
r<br />
B<br />
<br />
<br />
<br />
<br />
a<br />
B / O<br />
<br />
/ O<br />
0<br />
a <br />
0<br />
<br />
a D<br />
a<br />
D<br />
a 0<br />
a B<br />
<br />
<br />
a<br />
C / O<br />
<br />
C<br />
<br />
a<br />
C / O<br />
a 0<br />
a <br />
C<br />
a A<br />
Przyspieszenie kątowe<br />
<br />
a<br />
a<br />
a<br />
1<br />
<br />
<br />
0<br />
<br />
r<br />
A<br />
<br />
A/<br />
O<br />
<br />
A/<br />
O<br />
<br />
<br />
a<br />
0<br />
<br />
a<br />
r <br />
<br />
A/<br />
O<br />
a<br />
0<br />
<br />
a<br />
2<br />
2 0<br />
r <br />
r<br />
<br />
<br />
r<br />
a<br />
r<br />
0<br />
<br />
A/<br />
O<br />
2<br />
2<br />
<br />
0 2<br />
a <br />
0<br />
a0<br />
<br />
<br />
<br />
<br />
a<br />
D / O<br />
D<br />
a 0<br />
a<br />
a<br />
<br />
B / O<br />
<br />
B / O<br />
<br />
<br />
a<br />
a<br />
<br />
C / O<br />
<br />
C / O<br />
<br />
<br />
a<br />
a<br />
<br />
D / O<br />
<br />
D / O<br />
r a<br />
0<br />
2<br />
2 0<br />
r <br />
r<br />
2<br />
2<br />
4 2<br />
<br />
0<br />
0 <br />
a <br />
<br />
r <br />
2<br />
<br />
0 2<br />
a B<br />
<br />
a C<br />
<br />
a0 a0<br />
r<br />
<br />
<br />
2<br />
a D<br />
2<br />
0<br />
r<br />
Click here to get your free novaPDF Lite registration key
Przykład 3<br />
Pręt AB o długości l ślizga się po poziomej prostej opierając się o<br />
naroże C. Koniec A pręta posiada prędkość A<br />
oraz przyspieszenie a A<br />
.<br />
Wyznaczyć przyspieszenie końca B pręta jeśli tworzy on z poziomem<br />
kąt . Dany jest wymiar h.<br />
B<br />
C<br />
l<br />
h<br />
<br />
A<br />
A<br />
a A<br />
Click here to get your free novaPDF Lite registration key
y<br />
Rozwiązanie<br />
<br />
A 2<br />
Prędkość kątowa pręta sin (wykład 7, przykład 3)<br />
h<br />
x<br />
a <br />
A<br />
a<br />
B / A<br />
B<br />
<br />
<br />
<br />
<br />
a<br />
B / A<br />
2<br />
2<br />
sin <br />
<br />
A<br />
<br />
<br />
a sin 2<br />
<br />
A<br />
h h <br />
C<br />
l<br />
<br />
<br />
<br />
<br />
a<br />
B<br />
aA<br />
aB<br />
/ A<br />
aB<br />
/ A<br />
<br />
h<br />
<br />
<br />
<br />
A<br />
A<br />
a<br />
<br />
B<br />
2<br />
/ A<br />
l aB<br />
/ A<br />
l<br />
wektor<br />
a B<br />
aBx<br />
i <br />
j<br />
a A<br />
<br />
a<br />
B / A l sin l<br />
<br />
a<br />
B / A l cos<br />
a A 0<br />
cos<br />
2 l sin<br />
aBy<br />
a<br />
<br />
a<br />
<br />
Bx<br />
a<br />
By<br />
a<br />
a<br />
A<br />
<br />
<br />
<br />
l<br />
h<br />
A<br />
sin<br />
l<br />
sin<br />
h<br />
a A<br />
2<br />
l sin<br />
l cos<br />
<br />
2 l<br />
1<br />
3<br />
A<br />
h<br />
3<br />
2<br />
<br />
l cos<br />
l sin<br />
<br />
A<br />
2 l<br />
cos<br />
<br />
A<br />
h<br />
2<br />
2<br />
2<br />
sin<br />
sin<br />
3<br />
4<br />
cos<br />
<br />
3cos<br />
2<br />
1<br />
<br />
Click here to get your free novaPDF Lite registration key
Przykład 4<br />
Obliczyć przyspieszenie tłoka B w położeniu mechanizmu korbowego<br />
pokazanym na rysunku. Dane są: promień korby r, długość korbowodu<br />
l, kąt oraz prędkość kątowa 0<br />
=const korby.<br />
<br />
r<br />
A<br />
l<br />
O<br />
0<br />
B<br />
Click here to get your free novaPDF Lite registration key
Rozwiązanie<br />
0<br />
Prędkość kątowa korbowodu (wykład 7, przykład 5)<br />
a<br />
O<br />
A<br />
<br />
<br />
r<br />
<br />
a <br />
A<br />
<br />
A<br />
r cos<br />
<br />
a<br />
B<br />
aA<br />
aB<br />
/ A<br />
aB<br />
/ A<br />
<br />
<br />
2 <br />
2<br />
0 r aB<br />
/ A<br />
l aB<br />
/ A<br />
l<br />
wektor<br />
0<br />
i <br />
j<br />
a A 2<br />
r 0<br />
sin<br />
<br />
a<br />
B / A l sin <br />
<br />
a 2 l cos <br />
a B / A<br />
B<br />
l cos <br />
2<br />
l r<br />
cos<br />
2<br />
<br />
2<br />
l <br />
2<br />
r 0<br />
cos<br />
2 l sin <br />
aBx<br />
0<br />
<br />
r sin<br />
l<br />
r cos 2<br />
<br />
<br />
a<br />
B / A<br />
<br />
<br />
B<br />
<br />
<br />
a<br />
B / A<br />
2<br />
2<br />
a Bx<br />
<br />
<br />
0<br />
r sin<br />
l sin l cos <br />
2<br />
2 <br />
0 0<br />
r cos<br />
l cos l sin <br />
2<br />
2<br />
0<br />
r cos<br />
l sin <br />
<br />
l cos <br />
2<br />
2<br />
<br />
r sin <br />
<br />
<br />
0r<br />
cos<br />
tan sin<br />
<br />
3<br />
<br />
l cos <br />
gdzie:<br />
2<br />
r cos<br />
l r<br />
cos<br />
<br />
tan <br />
cos <br />
2<br />
2<br />
l r<br />
cos<br />
<br />
l<br />
a Bx<br />
y<br />
x<br />
2<br />
Click here to get your free novaPDF Lite registration key
Przykład 5<br />
Koniec nici nawiniętej na szpulę o promieniach R i r ciągnięty jest z<br />
prędkością i przyspieszeniem a.<br />
Obliczyć przyspieszenia punktów A i B szpuli.<br />
B<br />
a <br />
A<br />
r<br />
R<br />
Click here to get your free novaPDF Lite registration key
a<br />
A / O<br />
A<br />
a <br />
0<br />
Rozwiązanie<br />
<br />
a <br />
A<br />
<br />
a<br />
A / O<br />
<br />
B<br />
<br />
a<br />
B / O<br />
C<br />
r<br />
a <br />
0<br />
O<br />
a 0<br />
<br />
<br />
a<br />
B / O<br />
a B<br />
<br />
<br />
R r<br />
<br />
<br />
a<br />
a<br />
0<br />
<br />
<br />
<br />
R r<br />
R<br />
<br />
<br />
<br />
<br />
R r<br />
a<br />
<br />
R r<br />
R<br />
a<br />
R r<br />
<br />
<br />
a<br />
A<br />
aO<br />
aA<br />
/ O<br />
aA<br />
/ O<br />
<br />
A / O<br />
R<br />
R a<br />
R r<br />
a<br />
prędkość kątowa<br />
szpuli<br />
przyspieszenie kątowe<br />
szpuli<br />
przyspieszenie środka<br />
szpuli<br />
<br />
<br />
A / O<br />
przyspieszenie<br />
punktu A<br />
2 2<br />
R <br />
<br />
R<br />
R r<br />
<br />
2<br />
R<br />
a<br />
A<br />
<br />
2<br />
<br />
a<br />
a<br />
a 2<br />
A / O<br />
0<br />
A / O<br />
środek prędkości<br />
szpuli<br />
<br />
a<br />
a<br />
<br />
<br />
<br />
<br />
a<br />
B<br />
aO<br />
aB<br />
/ O<br />
aB<br />
/ O<br />
<br />
B / O<br />
B<br />
<br />
R<br />
R a<br />
R r<br />
<br />
2 <br />
a<br />
a a<br />
2<br />
0<br />
A / O<br />
a<br />
A / O<br />
<br />
B / O<br />
przyspieszenie<br />
punktu B<br />
2 2<br />
R <br />
<br />
R<br />
R r<br />
<br />
2<br />
Click here to get your free novaPDF Lite registration key
Przykład 6<br />
Mechanizm składa się z 3 prętów połączonych przegubowo. Pręty O 1<br />
A oraz O 2<br />
B<br />
mogą obracać się wokół nieruchomych osi O 1<br />
i O 2<br />
. Pręt O 1<br />
A obraca się z<br />
prędkością kątową 1<br />
i przyspieszeniem kątowym 1<br />
. Wyznaczyć<br />
przyspieszenie punktu B w położeniu mechanizmu pokazanym na rysunku.<br />
Dane są wymiary a, b oraz c.<br />
B<br />
A<br />
b<br />
a<br />
1<br />
O 1<br />
1<br />
O 2<br />
c<br />
Click here to get your free novaPDF Lite registration key
a <br />
A<br />
<br />
a<br />
y<br />
1<br />
<br />
a<br />
<br />
a<br />
A<br />
<br />
a<br />
B<br />
B<br />
A<br />
<br />
a<br />
Rozwiązanie<br />
A<br />
x<br />
<br />
a<br />
<br />
a<br />
<br />
a<br />
<br />
B / A<br />
<br />
a <br />
A<br />
O 1<br />
<br />
A<br />
A<br />
<br />
B<br />
<br />
A<br />
1<br />
<br />
a<br />
<br />
A<br />
<br />
a<br />
<br />
a<br />
<br />
B / A<br />
<br />
B<br />
<br />
<br />
a<br />
<br />
B<br />
<br />
AB<br />
<br />
a<br />
<br />
<br />
<br />
<br />
A<br />
<br />
a<br />
<br />
B<br />
l AB<br />
<br />
a B<br />
2<br />
<br />
<br />
a<br />
B / A<br />
B<br />
2<br />
1<br />
a aA<br />
1<br />
a<br />
a<br />
tan <br />
<br />
B / A<br />
a<br />
a<br />
<br />
B<br />
<br />
B<br />
<br />
b a<br />
AB<br />
b<br />
2<br />
l<br />
2<br />
b<br />
2<br />
c<br />
AB<br />
B<br />
<br />
A <br />
AB<br />
0<br />
<br />
a <br />
A<br />
B<br />
wektor<br />
a A<br />
<br />
<br />
a<br />
B / A<br />
2<br />
O 2<br />
<br />
AB<br />
AB<br />
<br />
a B<br />
<br />
a <br />
B<br />
a <br />
2<br />
a <br />
1<br />
1<br />
B<br />
1a<br />
B<br />
<br />
<br />
B<br />
2b<br />
pręt AB porusza się<br />
ruchem postępowym<br />
prędkość kątowa pręta AB<br />
i <br />
1<br />
a<br />
<br />
<br />
ABl AB<br />
sin<br />
AB<br />
AB<br />
l<br />
l<br />
AB<br />
AB<br />
<br />
a<br />
2<br />
1<br />
b<br />
<br />
j <br />
2<br />
1<br />
a<br />
ABl AB<br />
2<br />
b 0<br />
0 b 2 2<br />
sin<br />
<br />
2b<br />
<br />
2 <br />
cos<br />
2b<br />
<br />
<br />
cos<br />
2 2<br />
2 2<br />
1 a 2b<br />
1<br />
a 2b<br />
tan<br />
1a<br />
<br />
<br />
2<br />
<br />
l cos<br />
b<br />
Click here to get your free novaPDF Lite registration key
Rozwiązanie<br />
Ostatecznie:<br />
a<br />
a<br />
Bx<br />
By<br />
a<br />
a<br />
<br />
B<br />
<br />
B<br />
<br />
b<br />
2<br />
2<br />
<br />
b<br />
2<br />
<br />
2<br />
1<br />
<br />
2<br />
1<br />
a<br />
<br />
a<br />
b<br />
b a<br />
2<br />
bc<br />
<br />
2<br />
a<br />
1<br />
Click here to get your free novaPDF Lite registration key
Przykład 7<br />
Wierzchołki A i B trójkąta równobocznego posiadają przyspieszenia a A<br />
oraz a B<br />
skierowane wzdłuż jego boków jak na rysunku. Wyznaczyć przyspieszenie<br />
wierzchołka C.<br />
C<br />
a <br />
A<br />
A<br />
a <br />
B<br />
B<br />
Click here to get your free novaPDF Lite registration key
Rozwiązanie<br />
<br />
y<br />
<br />
a<br />
A / B<br />
A<br />
a<br />
a<br />
a<br />
Cx<br />
Cy<br />
Cx<br />
a<br />
<br />
x<br />
a <br />
A<br />
a <br />
B<br />
<br />
<br />
a<br />
A / B<br />
C<br />
<br />
C<br />
l<br />
=60 o<br />
<br />
<br />
a <br />
a C / B<br />
l<br />
<br />
<br />
a<br />
C / B<br />
a <br />
B<br />
<br />
a<br />
C<br />
aB<br />
aC<br />
/ B<br />
aC<br />
/ B<br />
<br />
C<br />
<br />
<br />
2<br />
/ B<br />
l aC<br />
/ B<br />
l<br />
2<br />
a<br />
<br />
B<br />
l sin<br />
l cos<br />
2 <br />
l cos<br />
l sin<br />
<br />
<br />
a<br />
A<br />
1<br />
a<br />
2<br />
B<br />
a<br />
Cy<br />
<br />
l<br />
3<br />
a<br />
2<br />
B<br />
<br />
B<br />
a<br />
a<br />
A<br />
A<br />
<br />
<br />
<br />
<br />
a<br />
A<br />
aB<br />
aA<br />
/ B<br />
aA<br />
/ B<br />
a<br />
<br />
A<br />
wektor<br />
a B<br />
a<br />
A / B<br />
<br />
<br />
a<br />
A / B<br />
a <br />
<br />
A<br />
<br />
a<br />
C / B<br />
<br />
<br />
a<br />
C / B<br />
a <br />
C<br />
sin<br />
l<br />
2<br />
/ B<br />
l aA<br />
/ B<br />
l<br />
i <br />
cos<br />
a<br />
B<br />
aA<br />
<br />
j <br />
aB<br />
0<br />
0 l<br />
2<br />
l 0<br />
cos<br />
l sin<br />
aCx<br />
2<br />
l<br />
<br />
<br />
a A<br />
sin<br />
l cos<br />
2 l cos <br />
2 l sin <br />
aCy<br />
2 1<br />
l aA<br />
a<br />
2<br />
3<br />
l aA<br />
2<br />
B<br />
Click here to get your free novaPDF Lite registration key