

Simulering af musklers strækrefleks 1 Introduktion
Simulering af musklers strækrefleks 1 Introduktion
Simulering af musklers strækrefleks 1 Introduktion

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Indhold<br />
1. <strong>Introduktion</strong><br />
2. Teori<br />
3. Analyse <strong>af</strong> muskel model<br />
4. Analyse <strong>af</strong> spindel model<br />
5. <strong>Simulering</strong> <strong>af</strong> <strong>strækrefleks</strong>en<br />
1 <strong>Introduktion</strong><br />
<strong>Simulering</strong> <strong>af</strong> <strong>musklers</strong> <strong>strækrefleks</strong><br />
Køreplan<br />
01005 Matematik 1 - FORÅR 2005<br />
Simple bevægelser som sker uden hjernens medvirken kaldes reflekser. Disse ses, når vi f.<br />
eks. fanger et faldende objekt i hånden. Her trækker musklerne sig hurtigt sammen i en grad<br />
som lige netop er nok til at holde objektet stationært.<br />
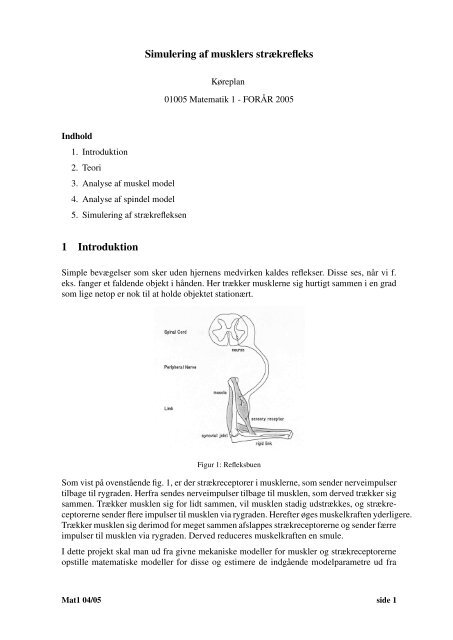
Figur 1: Refleksbuen<br />
Som vist på ovenstående fig. 1, er der strækreceptorer i musklerne, som sender nerveimpulser<br />
tilbage til rygraden. Herfra sendes nerveimpulser tilbage til musklen, som derved trækker sig<br />
sammen. Trækker musklen sig for lidt sammen, vil musklen stadig udstrækkes, og strækreceptorerne<br />
sender flere impulser til musklen via rygraden. Herefter øges muskelkr<strong>af</strong>ten yderligere.<br />
Trækker musklen sig derimod for meget sammen <strong>af</strong>slappes strækreceptorerne og sender færre<br />
impulser til musklen via rygraden. Derved reduceres muskelkr<strong>af</strong>ten en smule.<br />
I dette projekt skal man ud fra givne mekaniske modeller for muskler og strækreceptorerne<br />
opstille matematiske modeller for disse og estimere de indgående modelparametre ud fra<br />
Mat1 04/05 side 1
målte data, som beskriver komponenternes karakteristika. Den samlede model for <strong>strækrefleks</strong>en<br />
benyttes til at simulere musklens reaktion på en ydre belastning ved hjælp <strong>af</strong> et computerprogram.<br />
Endelig undersøges følsomheden over for ændringen i modellens parametre.<br />
2 Teori<br />
I eksperimenter, hvor musklen stadig sidder i et dyr eller menneske, er det sjældent muligt at<br />
måle en muskels længde direkte. Istedet måles den indirekte ved f.eks. at måle vinkeldrejningen<br />
i et led.<br />
I denne projektopgave vil vi undersøge hvorledes nedbøjning <strong>af</strong> en underarm foregår, når<br />
armen pludselig udsættes for en ydre belastning. Vi tænker os overarmen fikseret i vandret<br />
retning på bord, medens underarmen fastholdes, således at vinklen θ imellem overarm og underarm<br />
er på ca. 135 ◦ . Underarmen påføres en pludelig belastning, hvorved vinklen forøges.<br />
Vi vil i det følgende opstille en matematisk model, der kan beskrive vinklen θ(t) som funktion<br />
<strong>af</strong> tiden t. Modellen bygger på et arbejde fra 1981 <strong>af</strong> John. F. Soechting et. al. [1]<br />
2.1 Dynamisk model for underarm<br />
Figur 2: Belasningsmoment og drejningsvinkel<br />
I fig. 2 er vist underarmens belastning med en ydre vægt. En ligning til bestemmelse <strong>af</strong><br />
drejningensvinklen θ(t), får vi ved at opstille impulsmomentsætningen omkring understøtningspunktet<br />
(albueleddet)<br />
hvor<br />
• Mx(t) er momentet 1 fra belastningen.<br />
• M(t) er momentet fra musklen på underarm.<br />
• J er underarmens inertimoment 1 omkring albueleddet.<br />
• θ(t) er vinklen imellem over- og underarm.<br />
1 Christiansen, Both & Sørensen, MEKANIK, DTU 2000, p. 5-3 og p. 7-9<br />
Mx(t) − M(t) = J ¨θ(t) , (1)<br />
Mat1 04/05 side 2
2.2 Muskel signalets oprindelse<br />
2.2.1 Den neurale signalbane<br />
Figur 3: Snit gennem rygraden<br />
På fig. 3 ses et snit gennem rygraden. Strækreceptorens nerve (<strong>af</strong>ferent axon) kommer ind<br />
bagest og forgrener sig i rygraden. En axon løber til hjernen og andre løber til motor-neuroner<br />
på samme og modsatte side.<br />
Figur 4: Motorisk enhed<br />
Motoraxonet leder impulser ud til musklen, hvor denne til sidst forgrener sig og innerverer<br />
mange muskelfibre, se fig. 4. En motoraxon og dens gruppe <strong>af</strong> muskelfibre kaldes en motorisk<br />
enhed. Man kan kun rekruttere muskelfibre i kvanter svarende til de motoriske enheder.<br />
Kr<strong>af</strong>ten kan dog gradueres kontinuert ved at ændre motoraxonernes impulsfrekvens [1] .<br />
Mat1 04/05 side 3
2.2.2 Musklens sammentrækningskr<strong>af</strong>t<br />
Musklens sammentrækningskr<strong>af</strong>t genereres <strong>af</strong> bøjelige arme i overlapningen mellem de tykke<br />
og tynde filamenter i muskelcellens myofibriler, se fig. 5.<br />
Figur 5: Myofibriler Figur 6: Elasticitet og friktion<br />
Udover en kr<strong>af</strong>tgenerator indeholder musklen også elasticitet som antydet i fig. 6 . Denne<br />
elasticitet er jævnt fordelt over hele musklens længde. Endelig frembringer de bøjelige fangarme<br />
en friktion, som er lille i en <strong>af</strong>slappet muskel (få påhæftede fangarme) og større i en<br />
anspændt muskel [1] .<br />
2.3 Muskelmodellen<br />
Figur 7: Neuromuskulær refleksmodel<br />
Musklen kan modelleres med tre mekaniske komponenter, som vist i fig. 7 :<br />
1. En kr<strong>af</strong>tgenerator M0(t) som styres <strong>af</strong> motoraxonets impulsfrekvens.<br />
2. En dæmper B, som repræsenterer viskøs dæmpning i myoplasmaet. Ved små variationer<br />
<strong>af</strong> muskelkr<strong>af</strong>ten kan dæmpningskoefficienten B antages at være konstant.<br />
3. En fjeder k, som repræsenterer muskelvævets elasticitet.<br />
Mat1 04/05 side 4
Indføres hjælpevariablen θ1(t) , se fig. 7, bliver de styrende ligninger for muskelmodellen<br />
og<br />
M(t) = k (θ(t) − θ1(t)) (2)<br />
M(t) = M0(t) + B ˙θ1(t) (3)<br />
hvor M0(t) er momentet, som musklen udøver under isometriske betingelser. Kr<strong>af</strong>tgeneratoren<br />
M0(t) er repræsenteret som en funktion <strong>af</strong> tiden, da den styres <strong>af</strong> alfa motorneuronernes<br />
impulsfrekvens.<br />
2.4 Musklens føleorganer<br />
2.4.1 Muskel receptorer<br />
Figur 8: Musklens receptorer<br />
Musklen indeholder to typer <strong>af</strong> føleorganer, se fig. 8:<br />
1. Kr<strong>af</strong>treceptorer ( seneorgan ), som er placeret i musklens sener.<br />
2. Længde- og hastighedsreceptorer ( spindel ), der sidder parallelt med muskelfibrene.<br />
Specielt om spindlerne gælder der<br />
• at der findes 600 - 1300 spindler i én muskel<br />
• at hver spindel indeholder 2 - 12 miniature muskelfibre, der er indkapslet i bindevæv<br />
(intr<strong>af</strong>usal fibers)<br />
I dette projekt vil vi udelade seneorganet.<br />
Mat1 04/05 side 5
2.4.2 Spindlens anatomi<br />
Figur 9: Aktivering <strong>af</strong> muskelspindel<br />
Når spindlerne strækkes ud, se fig.9, er det de myofibrilløse områder (equatorialregionerne),<br />
som strækkes. De spiralformede nervetråde strækkes, hvorved nerveimpulser genereres og<br />
sendes til rygraden. For at virke som længdereceptor skal ekvatorialregionen altid være udspændt<br />
uanset muskellængde.<br />
2.4.3 Spindel model<br />
Figur 10: Muskel spindelmodel<br />
Det antages nu, at de <strong>af</strong>ferente nerver, se fig. 3, genererer nerveimpulser med en frekvens,<br />
som er proportional med eqkvitorialregionens udspænding. Musklens aktive kr<strong>af</strong>t er derfor<br />
proportional med nerveaxonets impulsfrekvens. Indføres hjælpevariablen θ2(t) , se fig. 10,<br />
kan det neurale signal M0(t) fra spindlen skrives<br />
hvor β kaldes den <strong>af</strong>ferente skalering.<br />
M0(t) = β(θ(t) − θ2(t)) (4)<br />
Ved <strong>af</strong>kortning <strong>af</strong> muskellængden skal spindlernes polære regioner <strong>af</strong>kortes tilsvarende for<br />
at opretholde en udspændt equatorialregion. Dette sikres ved hjælp <strong>af</strong> de efferente axoner<br />
(gamma- og beta-axoner vist i fig. 9), som aktiverer de kontraktile elementer i spindlerne.<br />
Mat1 04/05 side 6
Polarregionerne modelleres, se fig. 10 , med en kr<strong>af</strong>tgenerator med værdien Γ0 siddende parallelt<br />
med en viskøs dæmper med dæmpningskoefficienten Bs , der repræsenterer friktionen,<br />
samt en fjeder med stivheden ksp, der repræsentere elasticiteten. Disse elementer er serieforbundet<br />
med en fjeder med stivheden kss , der repræsenterer elasticiteten i equatorialregionen,<br />
se fig. 10 .<br />
Disse sammenhænge kan udtrykkes ved ligningerne<br />
og<br />
3 Analyse <strong>af</strong> muskel model<br />
Ms(t) = kss (θ(t) − θ2(t)) (5)<br />
Ms(t) = Γ0 + Bs ˙θ2(t) + ksp θ2(t) , (6)<br />
Den matematiske model, som vi skal arbjede med i de følgende <strong>af</strong>snit, er nærmere behandlet<br />
i et <strong>af</strong>snit i en lærebog om kontrolteori <strong>af</strong> Michael C.K.Khoo [2] . De grundlæggende<br />
ligninger (1 - 3) i muskelmodellen er givet på side 2 og på side 5 .<br />
1. Udled en differentialligning i albueleddets drejningsvinkel θ(t) udtrykt ved funktionerne<br />
Mx(t) og M0(t).<br />
Vi indfører nu vinkelhastigheden ω(t) ved ligningen<br />
derved får differentialligningen fra spørgsmål 1 formen<br />
¨ω(t) + k<br />
B<br />
ω(t) = ˙θ(t) , (7)<br />
k k<br />
˙ω(t) + ω(t) =<br />
J J<br />
hvor f (t) er en funktion, der <strong>af</strong>hænger <strong>af</strong> funktionerne Mx(t) og M0(t) .<br />
f (t) , (8)<br />
2. Indfør vinkelhastigheden ω(t) i differentialligningen fra spørgsmål 1 , og bring denne<br />
på formen givet ved ligning (8) . Bestem derved f (t) udtrykt ved Mx(t) og M0(t) .<br />
3. Opskriv karakterligningen for differentialligningen (8) og find rødderne.<br />
4. Find den fuldstændige løsning til den homogene differentialligning hørende til ligning<br />
(8) , når følgende talværdier er givet: J = 1/10 , k = 80 og B = 2 .<br />
Bestem dernæst den partikulære løsning, der opfylder (ω(0), omega(0) ˙ = 0) = (1,0) ,<br />
og plot løsningen ved hjælp <strong>af</strong> MAPLE.<br />
Systemet tænkes nu påvirket til tiden t = 0 med en ydre påvirkning, således at f (t) = E(t) ,<br />
hvor E(t) er en stepfunktion (Heavisides enhedsspring) givet ved<br />
Mat1 04/05 side 7
0 , t < 0<br />
E(t) =<br />
1 , t > 0<br />
Det inhomogene led i ligning (8) kan skrives<br />
qinh(t) = k<br />
f (t)<br />
J<br />
. (9)<br />
I ethvert interval, hvor qinh(t) er kontinuert, ved vi fra eksistens- og entydighedsætningen 2 for<br />
differentialligninger, at løsningen ω(t) er kontinuert og har kontinuerte <strong>af</strong>ledede <strong>af</strong> 2. orden.<br />
Hvis f (t) = E(t) , bliver qinh(t) stykvis kontinuert, hvilket betyder, at nogle <strong>af</strong> de <strong>af</strong>ledede<br />
for ω(t) ikke behøver at være kontinuerte for t = 0 .<br />
Vi antager, at der eksisterer en løsning ω(t) til differentialligningen (8) i hele intervallet<br />
−∞ < t < +∞ . For at undersøge kontinuitets- og differentiabilitetsforholdene for t = 0 ,<br />
ser vi på løsningerne i hvert <strong>af</strong> intervallerne t < 0 og t > 0 ved at sætte<br />
ω(t) =<br />
ω−(t) , t < 0<br />
ω+(t) , t > 0<br />
Vi skal så bagefter stykke de to løsninger ω−(t) og ω+(t) sammen for t = 0 .<br />
Hvad sker der med løsningen ω+(t) for t = 0 ? For at besvare dette spørgsmål, integrerer vi<br />
differentialligningen (8) i et lille interval omkring t = 0 .<br />
5. Vis, at for f (t) = E(t) gælder følgende betingelser for ω−(t) og ω+(t)<br />
ω+(0) = ω−(0) , ˙ω+(0) = ˙ω−(0)<br />
ved at integrere differentialligningen (9) et passende antal gange i intervallet<br />
[−ε,+ε] , ε > 0 , omkring t = 0 , og dernæst lade ε → 0 . Hvad bliver værdien <strong>af</strong><br />
¨ω+(0) − ¨ω−(0) ?<br />
6. Find for f (t) = E(t) løsningen (stepresponset) til den inhomogene ligning (8) , når systemet<br />
er i hvile for t < 0 , og når talværdierne fra spørgsmål 4 benyttes. Plot løsningen<br />
ved hjælp <strong>af</strong> MAPLE.<br />
I virkeligheden kendes kun værdien J = 0.1 for inertimomentet, medens værdierne <strong>af</strong> størrelserne<br />
k og B er ubekendte. Disse størrelser må derfor måles. I fig. 11 på næste side er vist<br />
det målte steprespons for ω(t) , svarende til f (t) = E(t) .<br />
7. Benyt det målte steprespon fra fig. 11 til at estimere værdier for dæmpningen B og elasticitet<br />
k , når det antages, at inertimomentet.<br />
Vink: Udled et udtryk for værdien <strong>af</strong> stepresponset i maksimum og det tilhørende tidspunkt<br />
udtrykt ved k og B .<br />
2 Helge Elbrønd Jensen, Matematisk Analyse 1, DTU 2000, sætning 5.1, p.5.2<br />
Mat1 04/05 side 8<br />
.
8. Check (evt. ved brug <strong>af</strong> MAPLE), at de estimerede parameterværdier for B og k giver<br />
det målte steprespons.<br />
1.2<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
4 Analyse <strong>af</strong> spindelmodel<br />
1<br />
0<br />
0.2 0.4 0.6 0.8 1<br />
Figur 11: Måling <strong>af</strong> steprespons fra muskel<br />
I det følgende vil vi alene betragte spindelen. De grundlæggende ligninger (4 - 6) i spindelmodellen<br />
er givet i <strong>af</strong>snit 2.4.3 . Ved at eliminere størrelserne Ms(t) og θ2(t) <strong>af</strong> ligningerne<br />
kan man opnå følgende ligningen i M0(t)<br />
hvor τ og η er konstanter defineret ved<br />
˙M0(t) + 1<br />
τ M0(t) = β<br />
ητ θ(t) + β ˙θ(t) + β<br />
τ =<br />
Bs<br />
kss + ksp<br />
9. Udled differentialligningen givet i (10) .<br />
, η = kss + ksp<br />
ksp<br />
Bs<br />
Γ0 , (10)<br />
. (11)<br />
10. Argumentér for, at man i studiet <strong>af</strong> en muskelrefleks kan se bort fra leddet med det<br />
efferente input Γ0 til spindlen.<br />
Spindelen tænkes nu påvirket til tiden t = 0 med en ydre påvirkning, idet θ(t) pludselig<br />
springer med værdien 1 , således at θ(t) = E(t) , hvor E(t) er stepfunktionen givet i (9). Det<br />
inhomogene led qinh(t) i ligning (10) er givet ved<br />
Mat1 04/05 side 9
qinh(t) = β<br />
ητ θ(t) + β ˙θ(t)<br />
qinh(t) ikke defineret for t = 0 , da leddet ˙θ(t) ikke eksisterer for t = 0 . Det betyder, at M0(t)<br />
ikke er differentiable for t = 0 .Vi ser derfor på løsningen M0(t) i hvert <strong>af</strong> intervallerne t < 0<br />
og t > 0 , og sætter<br />
M0(t) =<br />
M0−(t) , t < 0<br />
M0+(t) , t > 0<br />
11. Vis, at for θ(t) = E(t) springer funktionen M0(t) med beløbet β for t = 0 , d.v.s. , at der<br />
gælder følgende begyndelsesbetingelser<br />
M0+(0) − M0−(0) = β .<br />
Vink: Benyt samme fremgangsmåde som spørgsmål 5 , d.v.s.integrér differentialligningen<br />
(10) omkring t = 0 .<br />
Udled dernæst et bogstavudtryk for stepresponset for M0(t) .<br />
110<br />
100<br />
90<br />
80<br />
70<br />
60<br />
50<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05<br />
Figur 12: Måling <strong>af</strong> steprespons fra spindel<br />
I fig.12 er vist det målte steprespons for M0(t) svarende til θ(t) = E(t) .<br />
12. Sammenhold det udledte udtryk med det målte steprespons i fig. 12, og estimér derved<br />
værdier for β, η og τ .<br />
Mat1 04/05 side 10<br />
.
5 <strong>Simulering</strong> <strong>af</strong> <strong>strækrefleks</strong>en<br />
Vi vil nu arbejde med den fulde model. Ud fra ligningerne (8) og (10) kan følgende system <strong>af</strong><br />
samhørende differentialligninger opstilles i albueleddets drejningsvinkel θ(t) og belastningens<br />
drejningsmoment Mx(t).<br />
...<br />
θ(t) + k<br />
B ¨θ(t) + k<br />
J ˙θ(t) = k<br />
<br />
Mx(t) − M0(t) +<br />
BJ<br />
1<br />
J ˙Mx(t)<br />
<br />
, (12)<br />
˙M0(t) + 1<br />
τ M0(t) = β<br />
ητ θ(t) + β ˙θ(t) . (13)<br />
Vi ser, at at koefficienterne til de ubekendte funktioner θ(t) og M0(t) og deres <strong>af</strong>ledede er<br />
konstanter. Leddene med Mx(t) , der optræder på højre siden i ligning (12) repræsenterer det<br />
inhomogene led qinh(t) , bestemt ved<br />
qinh(t) = k<br />
BJ Mx(t) + B<br />
k ˙Mx(t) , (14)<br />
Vi tænker os nu, at belastningens drejningsmoment Mx(t) for t = 0 momentant øges med<br />
5Nm , svarende til at<br />
Mx(t) =<br />
Indsættes udtrykket for Mx(t) i (14) får vi<br />
0 , t < 0<br />
5 , t > 0<br />
<br />
0 , t < 0<br />
qinh(t) =<br />
5 k<br />
BJ , t > 0<br />
qinh(t) er ikke defineret for t = 0 , da leddet ˙Mx(t) ikke eksisterer for t = 0 . Det betyder, at<br />
nogle <strong>af</strong> de <strong>af</strong>ledede for θ(t) ikke er differentiable for t = 0 . Vi ser på løsningerne θ(t) og<br />
M0(t) i hvert <strong>af</strong> intervallerne t < 0 og t > 0 , og sætter<br />
θ(t) =<br />
θ−(t) , t < 0<br />
θ+(t) , t > 0<br />
, M0(t) =<br />
.<br />
.<br />
M0−(t) , t < 0<br />
M0+(t) , t > 0<br />
13. Vis, at funktionerne θ(t) , ˙θ(t) og M0(t) alle er kontinuerte for t = 0 , d.v.s. , at der<br />
gælder følgende begyndelsesbetingelser<br />
θ+(0) = θ−(0) , ˙θ+(0) = θ−(0) , M0+(0) = M0−(0) .<br />
Vink: Benyt samme fremgangsmåde som spørgsmål 5 , d.v.s.integrér differentialligningerne<br />
(12) og (13) et passende antal gange omkring t = 0 .<br />
Vis endvidere, at ¨θ(t) springer for t = 0 , og bestem værdien for ¨θ+(0) − ¨θ−(0) .<br />
Mat1 04/05 side 11<br />
.
14. Løs differentialligningssystemet (12,13 ) , og plot θ(t) som funktion <strong>af</strong> tiden.<br />
Vink: Benyt dsolve i MAPLE til at løse ligningssystemet numerisk.<br />
15. Undersøg konsekvensen <strong>af</strong> at mindske eller øge β eller η med 50 %<br />
16. Undersøg effekten <strong>af</strong> at ændre andre <strong>af</strong> modelparametrene.<br />
6 Ekstra spørgsmål: Stabilitetsundersøgelse<br />
For at undersøge stabiliteten <strong>af</strong> muskel-spindel systemet omskrives det koblede differentialligningssystem<br />
givet i (8) og (10) til et system <strong>af</strong> 4 første ordens differentialligninger på<br />
formen<br />
˙z(t) = Az(t) + R(t) (15)<br />
hvor z(t) er en vektor, der indeholder θ(t) og dens <strong>af</strong>ledede. Systemmatricen A er en konstant<br />
4 × 4 matrix, og R(t) er en søjlevektor, der kun <strong>af</strong>hænger <strong>af</strong> Mx(t) .<br />
17. Omskriv det koblede differentialligningssystem givet i (9) og (10) på formen givet i<br />
ligning (15) udtrykt ved bogstaverne k , J , B , β og η .<br />
18. Opstil det karakteristiske polynomium p(λ) til for A på formen<br />
p(λ) = λ 4 + a1λ 3 + a2λ 2 + a3λ + a4 , (16)<br />
hvor koefficienterne a1 , a2 , a3 og a4 er udtrykt ved konstanterne k , J , B , β og η .<br />
Rødderne i det karakteristiske polynomium har i almindelighed den komplekse form λ =<br />
a+ib . Den tilhørende løsning til differentialligningssytemet vil da indeholde tidsfunktionen<br />
e (a+ib)t = e at (cos(bt) + sin(bt)) (17)<br />
Hvis Re(λ) = a > 0 vil løsningen ikke være begrænset når t → ∞ , og differentialligningssystemet<br />
siges at være ustabilt. Omvendt, hvis Re(λ) = a < 0 vil løsningen gå mod nul når t → ∞<br />
, og differentialligningssystemet siges at være asymptotisk stabilt.<br />
19. Benyt MAPLE til at finde et udtryk for rødderne λ i p(λ) , og undersøg dernæst om der<br />
findes værdier for k , J , B , β og η , hvor løsningen θ(t) er ustabil ?<br />
Vink: Man kan f.eks.holde tre <strong>af</strong> parametrene fast og lade MAPLE plotte realdelen <strong>af</strong> λ<br />
som funktion <strong>af</strong> de to resterende parametre.<br />
En mere systematisk måde at undersøge om et polynomium har rødderne beliggende i den<br />
venstre del <strong>af</strong> den komplekse plan er ved hjælp <strong>af</strong> Routh-Hurwitz metode. Ved denne metode<br />
kan man alene ud fra kendskabet til polynomiets koefficienter a1 , a2 , a3 og a4 sige noget<br />
om stabiliteten i systemet. Metoden er nærmere beskrevet i Matematisk Analayse 3 3 .<br />
20. Benyt Routh-Hurwitz metode til at sige noget om stabliliteten for løsningerne til differentialligningssystemet<br />
(15) og sammenlign med resultaterne fundne i spørgsmål 19<br />
.<br />
3 M.P.Bendsøe,W.Kliem: Matematisk Analyse 3, DTU 2000, p. 201-203<br />
Mat1 04/05 side 12
Litteratur<br />
[1] JF Soechting and F Lacquaniti , Journal of Neuroscience, Vol 1, 710-720, Copyright l’<br />
1981 by Society for Neuroscience<br />
[2] Michael C.K. Khoo, Physiological Control Systems. Analysis, Simulation, and Estimation.<br />
IEEE Press Series in Biomedical Engineering.Section 4.7 .<br />
Mat1 04/05 side 13














