Regelungstechnische Methoden in der Robotik Dr. - DLR
Regelungstechnische Methoden in der Robotik Dr. - DLR
Regelungstechnische Methoden in der Robotik Dr. - DLR

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong><br />
<strong>der</strong> <strong>Robotik</strong><br />
<strong>Dr</strong>.- Ing. Al<strong>in</strong> Albu-Schäffer<br />
Wahlfach im Sommersemester 2011<br />
Vorlesung: Do, 15:00 – 16:30<br />
Übung: Do: 16:45 – 18:15 (jede 2. Woche)<br />
Raum N0507<br />
Deutsches Zentrum für Luft- und Raumfahrt<br />
Institut für <strong>Robotik</strong> und Mechatronik<br />
TU München<br />
Lehrstuhl für Steuerungs- und Regelungstechnik<br />
Die Vorlesung baut auf „Grundlagen Intelligenter Roboter“ (GIR) auf.<br />
Es werden regelungstechnische Konzepte angewendet, die <strong>in</strong><br />
„Regelungstechnik II“ (RS2) (Prof. Buss) vorgetragen wurden.
Zielsetzung<br />
Es werden Werkzeuge zur Modellierung und Regelung komplexer (z.B. humanoi<strong>der</strong>)<br />
Robotersysteme <strong>in</strong> Interaktion mit unbekannten Umgebungen vorgestellt.<br />
Es soll e<strong>in</strong>e Übersicht <strong>der</strong> wichtigsten regelungstechnischen <strong>Methoden</strong> vermittelt<br />
werden, die <strong>der</strong>zeit zur Regelung solcher Systeme e<strong>in</strong>gesetzt werden.<br />
Diese Vorlesung baut auf die Vorlesung „Grundlagen Intelligenter Roboter“ (GIR) von<br />
<strong>Dr</strong>. Kolja Kühnlenz auf. Des Weiteren werden regelungstechnische Konzepte<br />
angewendet, die <strong>in</strong> „Regelungstechnik II“ (RS2) (Prof. Buss) vorgetragen werden.
Inhalt <strong>der</strong> Vorlesung<br />
•E<strong>in</strong>führung: Motivation, Trends <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
•Differentialgeometrie <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
Mannigfaltigkeiten<br />
Orientierungsdarstellungen, SO3, SE3<br />
Koord<strong>in</strong>atentransformationen für Vektoren, Kovektoren, Tensoren<br />
•Aufgabenorientierte Regelung – Entkopplung im Taks-Raum<br />
Robotergleichungen und Regelung <strong>in</strong> aufgabenbezogenen Koord<strong>in</strong>aten<br />
Redundante Systeme, Mikro-/Makromanipulation<br />
<strong>in</strong>verse K<strong>in</strong>ematik<br />
Entkoppelte Regelung <strong>in</strong> kartesischen und <strong>in</strong> Nullraum-Koord<strong>in</strong>aten<br />
•Roboterregelung durch Energieformung (Energy-Shap<strong>in</strong>g)<br />
•Kollisionsvermeidung mit Potentialfel<strong>der</strong>n<br />
•Nichtl<strong>in</strong>eare Beobachter: Kollisions- und Fehlerdetektion<br />
•Identifikation von Roboterparameter (Regressorbildung)<br />
•Adaptive Roboterregelung ?<br />
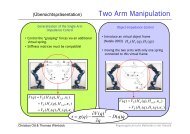
•Regelung/Steuerung komplexer k<strong>in</strong>ematischer Ketten<br />
Handregelung – Greifvorgänge<br />
Zweiarmsysteme, humanoide Manipulatoren<br />
•Erweiterte Robotermodelle: elastische Gelenke, elastische Strukturen ?
Organisatorisches<br />
• Umfang: - 2 SWS Vorlesung<br />
- 1 SWS Übung bung<br />
• Prüfung: Pr fung: Abschlussklausur<br />
– Dauer: 60M<strong>in</strong>. Term<strong>in</strong> wird 3 Wochen vor<br />
Vorlesungsabschluss festgelegt.<br />
– Es s<strong>in</strong>d sämtliche Unterlagen zugelassen.<br />
• Material: • ppt-Folien ppt Folien + Tafelanschrieb<br />
• Web: www.robotic.dlr.de/Al<strong>in</strong>.Albu_Schaeffer/vorlesung<br />
• Benutzername: rmr11, rmr11,<br />
Passwort: 11rmr 11rmr<br />
– Meldungen<br />
– Vorlesungsfolien<br />
– Übungsmaterial<br />
– ausgewählte Veröffentlichungen (als Ergänzung)<br />
• Feiertage, Vorlesungsausfall: Ke<strong>in</strong>e Vorlesung u. Übung bung am<br />
12.05!!!<br />
RMR’09 – <strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Zielsetzung<br />
Es werden Werkzeuge zur Modellierung und Regelung komplexer (z.B. humanoi<strong>der</strong>)<br />
Robotersysteme <strong>in</strong> Interaktion mit unbekannten Umgebungen vorgestellt.<br />
Es soll e<strong>in</strong>e Übersicht <strong>der</strong> wichtigsten regelungstechnischen <strong>Methoden</strong> vermittelt<br />
werden, die <strong>der</strong>zeit zur Regelung solcher Systeme e<strong>in</strong>gesetzt werden.<br />
Diese Vorlesung baut auf die Vorlesung „Grundlagen Intelligenter Roboter“ (GIR) von<br />
<strong>Dr</strong>. Kolja Kühnlenz auf. Des Weiteren werden regelungstechnische Konzepte<br />
angewendet, die <strong>in</strong> „Regelungstechnik II“ (RS2) (Prof. Bus) vorgetragen werden.
Differentialgeometrie <strong>in</strong> <strong>der</strong><br />
<strong>Robotik</strong>
Differentialgeometrische Begriffe<br />
• Motivation<br />
• Mannigfaltigkeiten<br />
• Tangentenvektoren und Tangentialraum<br />
• Kotangentenvektoren und Kotangentialraum<br />
•Transformation von Vektoren und Kovektoren<br />
•Tensoren<br />
•Koord<strong>in</strong>atentransformation für Tensoren<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Erstmals alle Klarheiten beseitigen …<br />
Was ist e<strong>in</strong> Vektor <strong>in</strong> <strong>der</strong> <strong>Robotik</strong> ?<br />
Motivation<br />
gängige Auffassung: e<strong>in</strong> Element e<strong>in</strong>es metrischen Vektorraumes<br />
z.B.: Gelenk-Position, -Geschw<strong>in</strong>digkeit, -Beschleunigung<br />
Gelenk-<strong>Dr</strong>ehmomente<br />
kartesische Position, kartesische Geschw<strong>in</strong>digkeit<br />
kartesische Beschleunigung<br />
kartesischen Kräfte/Momente<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
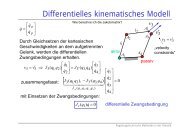
Was ist daran auszusetzen?<br />
1. All diese “vektoriellen” Größen transformieren bekanntlich auf<br />
unterschiedliche Weise zwischen Koord<strong>in</strong>atensystemen.<br />
x� � ( x�<br />
1, x�<br />
2<br />
x � T (q)<br />
T – homogene<br />
x� � J ( q)<br />
q�<br />
� �<br />
J T<br />
( q)<br />
F<br />
Gelenkdynamik<br />
Transformation<br />
J – Jacobimatrix<br />
q�<br />
J (q)<br />
(q)<br />
� F<br />
J T<br />
q , q�<br />
, �<br />
1<br />
q , q�<br />
, �<br />
x�<br />
Kartesische Dynamik<br />
Offensichtlich steck dah<strong>in</strong>ter e<strong>in</strong>e reichere Struktur, als bloß vektorielle Räume<br />
2<br />
1<br />
E<strong>in</strong>e differentialgeometrische Betrachtung ermöglicht e<strong>in</strong> tieferes Verständnis<br />
dieser Zusammenhänge<br />
2<br />
1<br />
A<br />
2<br />
x<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
)<br />
F �<br />
( Fx,<br />
Fy<br />
)
Was ist daran auszusetzen?<br />
2. Die 6-dimensionalen vektoriellen Räume <strong>der</strong> kartesischen<br />
Geschw<strong>in</strong>digkeiten und W<strong>in</strong>kelgeschw<strong>in</strong>digkeiten (twists) und <strong>der</strong><br />
kartesischen Kräfte und Momente (wrench) s<strong>in</strong>d ke<strong>in</strong>e metrischen Räume!<br />
We<strong>der</strong> Skalarprodukt noch die daraus resultierende<br />
1<br />
yT �<br />
y<br />
�<br />
y<br />
2<br />
y<br />
Vektornorm<br />
können physikalisch s<strong>in</strong>nvoll def<strong>in</strong>iert werden, d.h.:<br />
- unabhängig von <strong>der</strong> Wahl des Koord<strong>in</strong>atensystems<br />
- unabhängig von den Maße<strong>in</strong>heiten<br />
T �<br />
y<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Beispiel:<br />
x � [ 1,<br />
1,<br />
1,<br />
2,<br />
2,<br />
2]<br />
1 �<br />
aber<br />
T<br />
Was ist daran auszusetzen?<br />
x � � [ 2,<br />
2,<br />
2,<br />
�1,<br />
�1,<br />
�1]<br />
2<br />
mit Geschw<strong>in</strong>digkeit [m/s], W<strong>in</strong>kelgeschw<strong>in</strong>digkeit [rad/s]<br />
T<br />
� x� � x�<br />
mit Geschw<strong>in</strong>digkeit [mm/s], W<strong>in</strong>kelgeschw<strong>in</strong>digkeit [rad/s]<br />
3<br />
x � � [ 1�10<br />
, 1�10<br />
, 1�10<br />
, 2,<br />
2,<br />
2]<br />
1<br />
3<br />
3<br />
3<br />
x � � [ 2�10<br />
, 2�10<br />
, 2�10<br />
�1,<br />
�1,<br />
�1]<br />
2<br />
3<br />
3<br />
T<br />
T<br />
1<br />
� x� � x�<br />
� Vorsicht ist geboten, bei <strong>der</strong> Verallgeme<strong>in</strong>erung des<br />
(für Translationen) vertrauen Begriffes <strong>der</strong> Orthogonalität auf<br />
Twist und Wrenches<br />
1<br />
0<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
2<br />
2<br />
�<br />
�<br />
0
Was ist daran auszusetzen?<br />
3. Rotationen <strong>in</strong> 3D werden nicht durch e<strong>in</strong> Vektorraum beschrieben<br />
(im Gegensatz zu Translationen).<br />
- z.B. Rotationen s<strong>in</strong>d bekanntlich nicht kommutativ<br />
Weitere Vorsicht ist somit geboten bei Verallgeme<strong>in</strong>erung von Vorstellungen<br />
von Steifigkeiten, Potentiale, Reglerauslegung vom translatorischen Fall auf<br />
den rotatorischen Fall.<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
2<br />
R<br />
Mannigfaltigkeiten<br />
E<strong>in</strong>e differentielle Mannigfaltigkeit ist e<strong>in</strong> topologischer Raum <strong>der</strong> lokal<br />
m<br />
diffeomorphisch zum Euklidischen Raum R ist.<br />
Beispiel:<br />
Was ist <strong>der</strong> Raum aller Konfigurationen e<strong>in</strong>er Roboterspitze?<br />
E<strong>in</strong> Diffeomorphismus ist e<strong>in</strong>e differenzierbare Funktion, die unkehrbar ist und<br />
<strong>der</strong>en Umkehrfunktion ebenfalls differenzierbar ist.<br />
TCP<br />
Warum nur lokal?:<br />
2<br />
S<br />
x<br />
x<br />
x<br />
M<br />
R<br />
2<br />
x x x<br />
x<br />
x x<br />
2<br />
T<br />
Welche Mannigfaltigkeit<br />
beschreibt das TCP dieses<br />
Roboters? Und se<strong>in</strong>e Gelenke?<br />
x<br />
x<br />
x<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
E<strong>in</strong>gebettete Mannigfaltigkeiten<br />
n<br />
E<strong>in</strong>e e<strong>in</strong>gebettete Mannigfaltigkeit ist e<strong>in</strong> Unterraum von R , def<strong>in</strong>iert<br />
n p<br />
durch die Lösungsmenge e<strong>in</strong>er Vektorfunktion h : R � R<br />
h ( x , �,<br />
x ) � 0<br />
h<br />
1<br />
p<br />
1<br />
( x , �,<br />
x ) � 0<br />
1<br />
�<br />
n<br />
�(<br />
h1,<br />
�,<br />
hp<br />
)<br />
( x0)<br />
Gibt es p Koord<strong>in</strong>aten, so dass die Jakobimatrix �(<br />
x1,<br />
�,<br />
x p ) <strong>in</strong> e<strong>in</strong>em<br />
n<br />
Punkt 0 <strong>in</strong>vertierbar ist, so hat die Mannigfaltigkeit <strong>in</strong> <strong>der</strong> Umgebung<br />
R � x<br />
n<br />
des Punktes die Dimension m=n-p und (1) kann (Satz über implizite Funktionen)<br />
lokal aufgelöst werden<br />
( 1 m<br />
x<br />
x<br />
1<br />
p<br />
�<br />
�<br />
f<br />
f<br />
1<br />
( x , �,<br />
x<br />
p<br />
1<br />
�<br />
( x , �,<br />
x<br />
x , �, x ) s<strong>in</strong>d dann lokale Koord<strong>in</strong>aten <strong>in</strong> <strong>der</strong> Umgebung von x0 1<br />
m<br />
m<br />
)<br />
)<br />
(1)<br />
n �<br />
p<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
x2<br />
3<br />
R<br />
x1<br />
x1<br />
2<br />
R<br />
x3<br />
´3<br />
R<br />
E<strong>in</strong>gebettete Mannigfaltigkeiten: Beispiele<br />
3<br />
x2<br />
x1<br />
2<br />
E<br />
x2<br />
h 1<br />
h 1<br />
( x1,<br />
x2)<br />
� ax1<br />
� bx2<br />
��<br />
�<br />
x1 - lokale Koord<strong>in</strong>ate<br />
( x1,<br />
x2,<br />
x3)<br />
� ax1<br />
� bx2<br />
� cx3<br />
��<br />
�<br />
1<br />
2<br />
0<br />
x<br />
2<br />
1<br />
� � ( ax<br />
b<br />
0<br />
��<br />
)<br />
, x x - lokale Koord<strong>in</strong>aten x � � ( ax � bx ��<br />
)<br />
x 2 2 2<br />
( x , x , x ) � ax � bx � cx � r � 0<br />
h 1<br />
1<br />
1<br />
2<br />
2<br />
3<br />
, x x - lokale Koord<strong>in</strong>aten<br />
1<br />
(z.B. für die<br />
Nordhalbkugel)<br />
2<br />
3<br />
3<br />
1<br />
c<br />
2<br />
x3 �<br />
( r � ax1<br />
� bx<br />
c<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
1<br />
1<br />
1 2<br />
2<br />
2<br />
)
1. Die Erde<br />
lokale Koord<strong>in</strong>aten:<br />
Geogr. Länge und Breite<br />
Mannigfaltigkeiten: Beispiele I<br />
S<strong>in</strong>gularität an<br />
den Polen<br />
x <strong>in</strong> Umgebung<br />
des Südpols<br />
Mannigfaltigkeit M<br />
lokales<br />
Kartenbild<br />
um x<br />
lokale (polare)<br />
Koord<strong>in</strong>aten (r,�)<br />
lokale (konische)<br />
Koord<strong>in</strong>aten<br />
Lokale Koord<strong>in</strong>aten: zu jedem Punkt x <strong>in</strong> M existiert e<strong>in</strong>e Teilmenge U <strong>in</strong> M<br />
die x enthält, und e<strong>in</strong>e bijektive Abbildung<br />
n<br />
� : U �U� U�<br />
� R<br />
�<br />
n<br />
x� �R<br />
U<br />
� - Kartenabbildung<br />
- Kartenbild<br />
- lokale Koord<strong>in</strong>aten<br />
Um e<strong>in</strong>e Mannigfaltigkeit zu beschreiben, braucht man im Allgeme<strong>in</strong>en<br />
mehrere, überlappende Karten => Atlas<br />
Wechsel <strong>der</strong> Koord<strong>in</strong>aten: die Karten ( U , �)<br />
und ( V , �)<br />
enthalten x<br />
�1<br />
x�<br />
� �( � ( x�<br />
))<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
2. Orientierung e<strong>in</strong>es Starrkörpers<br />
Mannigfaltigkeiten: Beispiele II<br />
R3x3<br />
bekanntlich beschrieben durch e<strong>in</strong>e Rotationsmatrix<br />
Eigenschaften: R R I<br />
T � - orthogonal<br />
det( R)<br />
�1<br />
- rechtshändiges Koord<strong>in</strong>atensystem<br />
Der Konfigurationsraum besteht aus <strong>der</strong> Menge aller Rotationsmatrizen<br />
und wird as SO(3) –Special Orthogonal Group bezeichnet<br />
Übung: Man überprüfe, dass SO(3) e<strong>in</strong>e Gruppe ist<br />
9<br />
SO(3) ist e<strong>in</strong>e 3 – dimensionale Mannigfaltigkeit, e<strong>in</strong>gebettet z.B. <strong>in</strong> R zu<br />
dem die Menge aller 3x3 Matrizen isomorph ist<br />
Lokale Koord<strong>in</strong>aten, z.B.: - Eulerw<strong>in</strong>kel (�����) (mit Varianten)<br />
- Angle-Axis Darstellung (r, ���<br />
- Roll-Pitch-Yaw W<strong>in</strong>kel (�����)<br />
4<br />
Kle<strong>in</strong>ste s<strong>in</strong>gularitätsfreie, globale Darstellung R<br />
: z.B. Quaternionen<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Roll-Pitch-Yaw<br />
Angle axis Darstellung<br />
Zusatzfolie: Rotationsdarstellung<br />
�1�<br />
r � � � �<br />
� 11 r22<br />
r33<br />
1<br />
� cos �<br />
�<br />
� 2 �<br />
�r32<br />
� r23�<br />
1<br />
k �<br />
� �<br />
�<br />
r13<br />
� r31<br />
2s<strong>in</strong>�<br />
�<br />
��<br />
r21<br />
� r12<br />
��<br />
(Wie<strong>der</strong>holung aus Grundlagen Intelligenter Roboter)<br />
Quaternionen (Euler Parameter) nicht m<strong>in</strong>imal, s<strong>in</strong>gularitätsfrei, global<br />
� � � �<br />
��0, �1,<br />
�2,<br />
�3��<br />
�<br />
cos , s<strong>in</strong><br />
� 2 2 �<br />
�<br />
� �<br />
k �<br />
S<strong>in</strong>gulär für<br />
!<br />
� �<br />
n�<br />
�<br />
�<br />
k<br />
�<br />
k<br />
�1<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Mannigfaltigkeiten: Beispiele III<br />
3. Konfiguration e<strong>in</strong>es Starrkörpers <strong>in</strong> dreidimensionalen Raum<br />
bekanntlich beschrieben durch e<strong>in</strong>e homogene Transformation T4x<br />
4<br />
� R p�<br />
T � p - Position<br />
� �<br />
�01x3<br />
1�<br />
Der Konfigurationsraum besteht aus <strong>der</strong> Menge aller homogenen<br />
Transformationen und wird as SE(3) –Special Euklidian Group<br />
3<br />
bezeichnet (= SO(3)x R ) 6 – dimensionale Mannigfaltigkeit<br />
Lokale Koord<strong>in</strong>aten, z.B.: - x=(p x,p y,p z,�����) (mit Varianten)<br />
4. Konfiguration e<strong>in</strong>es (6-Achsigen) Roboters Q<br />
R<br />
6<br />
Gelenkw<strong>in</strong>kel q: - globale Karte<br />
Lokal um e<strong>in</strong>en Punkt q 0 kann die<br />
Vorwärtsk<strong>in</strong>ematik x=f(q) als e<strong>in</strong>e Abbildung zwischen<br />
Koord<strong>in</strong>aten zweier Mannigfaltigkeiten angesehen werden.<br />
5. Konfigurations- und Arbeitsraum e<strong>in</strong>es<br />
nicht planaren, 2-Achsigen Roboters mit endlos<br />
drehenden Achsen ist jeweils e<strong>in</strong> Torus<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>
Tangentenvektoren und Tangentialraum<br />
(kontravariante Vektoren o<strong>der</strong> e<strong>in</strong>fach Vektoren)<br />
Gegeben e<strong>in</strong>e m - dimensionale Mannigfaltigkeit M,<br />
def<strong>in</strong>iert man an jedem Punkt x den Tangentialraum<br />
T x M als den m – dimensionalen Vektorraum aller<br />
möglichen Geschw<strong>in</strong>digkeiten <strong>in</strong> x (entlang<br />
<strong>der</strong> Mannigfaltigkeit).<br />
Ausschließlich diese Größen werden <strong>in</strong> <strong>der</strong> Differentialgeometrie als<br />
„Vektoren“ bezeichnet. Dargestellt werden sie als Spaltenvektoren.<br />
Beispiele:<br />
� p�<br />
x �<br />
�q�<br />
1 �<br />
� �<br />
� �<br />
�<br />
p�<br />
y �<br />
�<br />
�<br />
�<br />
� p�<br />
z �<br />
q�<br />
� �q�<br />
i � Vektor auf Q x�<br />
� � � Vektor auf SE3<br />
� �<br />
��x<br />
�<br />
� � �<br />
��<br />
�<br />
� �<br />
y<br />
�q�<br />
Vektor auf SO3<br />
n �<br />
� �<br />
��<br />
�z<br />
��<br />
n<br />
Gelenkgeschw<strong>in</strong>digkeit <strong>in</strong> Kartesische Geschw<strong>in</strong>digkeit <strong>in</strong> SE3<br />
R<br />
v1<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong><br />
x<br />
v2
Kotangentenvektoren und Kotangentialraum<br />
(Kovektoren, Kovektorraum)<br />
*<br />
Der Kotangentialraum Tx M<strong>in</strong><br />
e<strong>in</strong>em Punkt x <strong>der</strong> Mannigfaltigkeit M ist<br />
<strong>der</strong> l<strong>in</strong>eare Vektorraum aller l<strong>in</strong>earen Funktionale<br />
� : TxM � R<br />
Die Elemente � des Kotangentialraumes werden Kotangentenvektoren<br />
(Kovektoren) genannt.<br />
Für e<strong>in</strong>e m-dimensionale Mannigfaltigkeit hat <strong>der</strong> Kovektorraum auch<br />
Dimension m.<br />
� fx<br />
�<br />
��<br />
Beispiele: 1 �<br />
� �<br />
� �<br />
�<br />
f y �<br />
�<br />
�<br />
�<br />
� fz<br />
�<br />
� � ��<br />
f �<br />
i �<br />
� �<br />
� �<br />
�mx<br />
�<br />
� � �<br />
�m<br />
�<br />
y<br />
�<br />
��<br />
�<br />
n �<br />
� �<br />
��<br />
mz<br />
��<br />
<strong>Dr</strong>ehmoment im Gelenkraum Kartesische verallgeme<strong>in</strong>erte Kraft<br />
T<br />
T<br />
� ( q�<br />
) �� � q�<br />
� P<br />
f ( x�)<br />
� f � x�<br />
� P<br />
Leistung<br />
<strong>Regelungstechnische</strong> <strong>Methoden</strong> <strong>in</strong> <strong>der</strong> <strong>Robotik</strong>