

13 Beispiel 1.1: Abschnittsweise Berechnung des Faltungsintegrals
13 Beispiel 1.1: Abschnittsweise Berechnung des Faltungsintegrals
13 Beispiel 1.1: Abschnittsweise Berechnung des Faltungsintegrals

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1.3 Faltung und Korrelation von Signalen <strong>13</strong><br />
<strong>Beispiel</strong> <strong>1.1</strong>: <strong>Abschnittsweise</strong> <strong>Berechnung</strong> <strong>des</strong> <strong>Faltungsintegrals</strong><br />
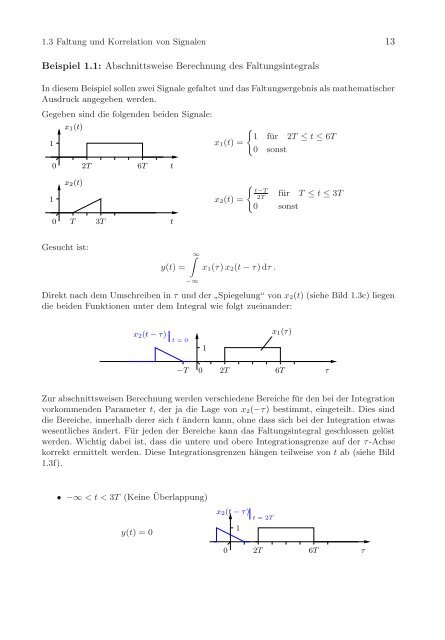
In diesem <strong>Beispiel</strong> sollen zwei Signale gefaltet und das Faltungsergebnis als mathematischer<br />
Ausdruck angegeben werden.<br />
Gegeben sind die folgenden beiden Signale:<br />
1<br />
1<br />
0<br />
0<br />
x1(t)<br />
x2(t)<br />
2T 6T<br />
T 3T<br />
Gesucht ist:<br />
t<br />
t<br />
y(t) =<br />
Z∞<br />
−∞<br />
x1(t) =<br />
x2(t) =<br />
(<br />
1 für 2T ≤ t ≤ 6T<br />
0 sonst<br />
x1(τ)x2(t − τ)dτ .<br />
( t−T<br />
2T für T ≤ t ≤ 3T<br />
0 sonst<br />
Direkt nach dem Umschreiben in τ und der ” Spiegelung“ von x2(t) (siehe Bild 1.3c) liegen<br />
die beiden Funktionen unter dem Integral wie folgt zueinander:<br />
x2(t − τ) t = 0<br />
−T 0<br />
1<br />
x1(τ)<br />
2T 6T τ<br />
Zur abschnittsweisen <strong>Berechnung</strong> werden verschiedene Bereiche für den bei der Integration<br />
vorkommenden Parameter t, der ja die Lage von x2(−τ) bestimmt, eingeteilt. Dies sind<br />
die Bereiche, innerhalb derer sich t ändern kann, ohne dass sich bei der Integration etwas<br />
wesentliches ändert. Für jeden der Bereiche kann das Faltungsintegral geschlossen gelöst<br />
werden. Wichtig dabei ist, dass die untere und obere Integrationsgrenze auf der τ-Achse<br />
korrekt ermittelt werden. Diese Integrationsgrenzen hängen teilweise von t ab (siehe Bild<br />
1.3f).<br />
• −∞ < t < 3T (Keine Überlappung)<br />
y(t) = 0<br />
x2(t − τ) t = 2T<br />
1<br />
0 2T 6T τ
14 1 Kontinuierliche Signale<br />
• 3T ≤ t < 5T (Eindringphase)<br />
y(t) =<br />
=<br />
Z<br />
t−T<br />
2T<br />
Z<br />
t−T<br />
2T<br />
1 · x2(t − τ)dτ<br />
1 ·<br />
= . . . = T ·<br />
(t − τ) − T<br />
2T<br />
“ t − 3T<br />
2T<br />
” 2<br />
dτ<br />
• 5T ≤ t < 7T (Keine Flächenänderung)<br />
y(t) = Fläche{x2(t)} = T<br />
• 7T ≤ t < 9T (Austrittsphase)<br />
y(t) =<br />
Z6T<br />
t−3T<br />
1 ·<br />
= . . . = T − T ·<br />
(t − τ) − T<br />
2T<br />
dτ<br />
“ t − 7T<br />
2T<br />
• 9T ≤ t < ∞ (Keine Überlappung)<br />
y(t) = 0<br />
Zusammengefasst lautet das Ergebnis:<br />
x2(t − τ) t = 4T<br />
1<br />
0 2T 6T τ<br />
t-T<br />
1<br />
x2(t − τ)<br />
t = 6T<br />
0 2T 6T τ<br />
1<br />
x2(t − τ)<br />
t = 8T<br />
” 2 0 2T 6T τ<br />
t − 3T<br />
1<br />
x2(t − τ) t = 10T<br />
0 2T 6T τ<br />
8<br />
0 ; − ∞ < t < 3T<br />
“ ” 2<br />
t−3T<br />
><<br />
T ·<br />
; 3T ≤ t < 5T y(t)<br />
2T<br />
y(t) = T ; 5T ≤ t < 7T T<br />
“ ” 2<br />
t−7T<br />
T − T · ; 7T ≤ t < 9T<br />
>:<br />
2T<br />
0 ; 9T ≤ t < ∞ 0 3T 9T t
1.3 Faltung und Korrelation von Signalen 15<br />
MATLAB-Projekt 1.C Faltung kontinuierlicher Signale<br />
1. Aufgabenstellung<br />
Die beiden Signale aus dem <strong>Beispiel</strong> <strong>1.1</strong> sollen mit Hilfe <strong>des</strong> MATLAB-<br />
Faltungsbefehls conv verknüpft werden.<br />
2. Lösungshinweise<br />
Man beachte, dass der MATLAB-Befehl conv eigentlich eine diskrete lineare<br />
Faltung, siehe Abschnitt 4.4.1, berechnet. Diese basiert auf einer Summation,<br />
während zur Faltung von kontinuierlichen Signalen eine Integration erforderlich<br />
ist. Die Umrechnung geschieht durch Multiplikation <strong>des</strong> mit conv<br />
gewonnenen Ergebnisses mit dem Rasterungsfaktor dt.<br />
3. MATLAB-Programm<br />
% Faltung kontinuierlicher Signale<br />
clear; close all;<br />
% Festlegung von Parametern<br />
T = 1; % (in Sek.)<br />
t_min = -T; % Zeitlicher Darstellungsbeginn<br />
t_max=10*T; % Zeitliches Darstellungsende<br />
dt = T/1000; % Delta-t<br />
t = t_min:dt:t_max; % Vektor mit den Zeitstützpunkten<br />
T1 = 2*T; % Impulsbeginn in x1<br />
Tb1 = 4*T; % Impulsbreite von x1<br />
T2 = T; % Impulsbeginn in x2<br />
Tb2 = 2*T; % Impulsbreite von x2<br />
% Erzeugung der Signale<br />
x1 = (t>=T1 & t=T2 & t
16 1 Kontinuierliche Signale<br />
y(t)/T<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
0 5 10 15 20<br />
t/T<br />
5. Weitere Fragen und Untersuchungen<br />
• Man variiere die Impulslängen sowie den Impulsbeginn der beiden Signale<br />
und beobachte das Faltungsergebnis.<br />
MATLAB-Projekt 1.D Gleitender Mittelwert durch Faltung<br />
1. Aufgabenstellung<br />
Es wird noch einmal das Projekt 1.B aufgegriffen. Die Glättung soll dieses<br />
Mal durch Faltung <strong>des</strong> verrauschten Sinussignals mit einem Rechtecksignal<br />
erreicht werden. Die Länge <strong>des</strong> Rechtecksignals soll gleich der Breite <strong>des</strong><br />
Glättungsfensters aus dem Projekt 1.B sein.<br />
2. MATLAB-Programm<br />
Das MATLAB-Programm aus dem Projekt 1.B kann weitgehend übernommen<br />
werden. Lediglich die for-Schleife ist durch folgende Zeilen zu ersetzen:<br />
rect = rectwin(B); % Rechtecksignal der Länge B (in dt-Schritten)<br />
z_tmp = conv(y,rect)/B; % Faltung mit Rechtecksignal u. Normierung<br />
z = z_tmp(B:length(t)-1); % B-1 Werte am Vektoranfang verwerfen<br />
3. Darstellung der Lösung<br />
Die Lösung ist identisch mit der Lösung aus dem Projekt 1.B.<br />
4. Weitere Fragen und Untersuchungen<br />
• Warum führt die Faltung mit dem Rechtecksignal zu exakt der gleichen<br />
Lösung wie bei der Bildung <strong>des</strong> gleitenden Mittelwertes im Projekt 1.B?<br />
• Warum sind die ersten B −1 Werte <strong>des</strong> Faltungsproduktes zu verwerfen?

![Leseprobe System [PDF-Dokument, 68 kb] - HBB Engineering GmbH](https://img.yumpu.com/26067080/1/190x245/leseprobe-system-pdf-dokument-68-kb-hbb-engineering-gmbh.jpg?quality=85)





