DES Servos - Graupner
DES Servos - Graupner
DES Servos - Graupner

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
helistuff | digital eco-servos | graupner | www.graupner.de<br />
In solchen Blisterpackungen<br />
werden die <strong>DES</strong>-<strong>Servos</strong> geliefert.<br />
Man sieht sofort, was man für<br />
welchen Einsatzzweck bekommt.<br />
Detaillierte technische Daten<br />
stehen auf der Rückseite<br />
76<br />
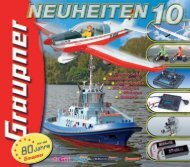
Und so schaut ein<br />
Karbonite-Getriebe aus<br />
www.rc-heli-action.de<br />
das in Asien verbreitete dynamische Messverfahren<br />
begründet, bei dem Aspekte der Massenbeschleunigung<br />
ergebnisorientiert einbezogen werden.<br />
Alle <strong>DES</strong>-<strong>Servos</strong> werden in transparenten Blister-<br />
Verpackungen geliefert, auf denen durch farbige Icons<br />
der optimal geeignete bzw. bevorzugte Einsatzbereich<br />
angegeben ist.<br />
Die Ergebnisse unserer Analysen gibt es in den<br />
entsprechenden Tabellen: Statische Daten;<br />
Dynamische Daten; Energetische Daten.<br />
Fazit<br />
Mit der Produktpalette der <strong>DES</strong>-<strong>Servos</strong> von <strong>Graupner</strong><br />
wird digitales High-Tech für Jedermann bezahlbar,<br />
denn die von uns getesteten Versionen sind in nahezu<br />
allen Werten mindestens gleichwertig mit Hochwertservos<br />
von JR, Futaba und anderen Herstellern<br />
– sie decken die Ansprüche vom Anfänger bis zum<br />
Wettbewerbspiloten sicher ab. Leistungsbandbreite,<br />
Elektronik, Getriebe und Triebwerk sind hier fast schon<br />
symbiotisch dem jeweils angepeilten Einsatzspektrum<br />
zugeordnet, und das ist im Flächen- und Helibereich,<br />
aber auch im Car-, Offroad- und Bootsbereich. Man<br />
darf daher mit Überzeugung sagen, dass wir in der<br />
Vergangenheit nur sehr selten in diesem Maße von<br />
einer Produktneuheit beeindruckt worden sind, die so<br />
bewusst preiswert daher kommt. Man bitte also um<br />
Nachsicht für diese offenkundige Begeisterung, aber<br />
den Usern wird es garantiert ähnlich ergehen. n<br />
details<br />
die statischen daten bedürfen eigentlich keiner<br />
näheren erläuterung. nun zu den dynamischen daten:<br />
stellzeit: ansteuerung eines servos durch ein<br />
spezielles software /Hardware-modul, das mit einer<br />
auflösung von 0,25 µs gradgenau (40 bzw. 45 grad) für<br />
ausschläge in beide richtungen voreingestellt wird. im<br />
dynamischen testbetrieb an einer absolut lastfesten<br />
stabilisierten spannungsquelle wird das servoimpulsdiadramm<br />
(rechts/neutral/links in drei durchgängen)<br />
digital mitgeschrieben, ebenso die Beschleunigungs-,<br />
Hochlauf-, Kraftlauf- und Bremsphase des servomotors<br />
im oszillogramm. die auswertung aller Phasen ist auf<br />
0,001 sekunden genau möglich.<br />
stellzeit unter last: Hierbei muss das vertikal<br />
montierte servo am 10 mm langen stellhebel (neutralstellung<br />
= 15.00 uhr) eine reale last über den vollen<br />
servoweg bewegen (zum Beispiel 2 kg = 20 ncm).<br />
stellKraFt oder stellmoment: unter gleichen<br />
Bedin g ungen wie vorstehend wird die maximale<br />
last ermittelt, die das servo noch sicher über die<br />
15-uhr-Position bringt. der steuerimpuls bringt den<br />
stellhebel dabei in einem lauf von ca. 16.30 uhr nach<br />
etwa 13.30 uhr. die reale last wird in der Bewegung<br />
bei etwa 16.00 uhr „weich“ angekoppelt.<br />
HalteKraFt: Bei einem angesteuerten servo wird<br />
der servoarm bei 10 mm seiner länge so lange mit<br />
einer stetig zunehmenden Kraft belastet, bis der<br />
servoarm um 5 grad von der eingesteuerten Position<br />
abgelenkt ist.<br />
rücKstellgenauigKeit: mit einem 150 mm<br />
langen zeiger am servoarm wird nach ansteuerung<br />
rechts – neutral und links – neutral die maximale<br />
abweichung von der sollposition des zeigers bewertet.<br />
Hochlaufzeit des servomotors: gibt die zeitspanne an,<br />
die der motor braucht, um seine volle Betriebsdrehzahl<br />
zu erreichen. reaktionszeit und antrittsgeschwindigkeit<br />
eines servos lassen sich so besser bewerten.<br />
deadBand: Je kleiner dieser Wert, umso eher/<br />
direkter reagiert ein servo selbst auf winzigste steuerknüppelbewegungen<br />
aus der neutralstellung heraus.<br />
sehr gute Werte gehen bis 1,0 µsek, gute bis 2,5 µsek,<br />
befriedigende bis 3,5 µsek und ausreichende bis 4,5<br />
µsek. Bei Werten darüber macht ein servo nicht mehr<br />
so viel spaß, da kleinste steuerkorrekturen am Knüppel<br />
vom servo gar nicht mehr ausgeführt werden können.<br />
störamPlitude unter Volllast: Bei maximaler<br />
last und leistung, also kurz vor dem Blockieren,<br />
wird durch das servotriebwerk auf der gemeinsamen<br />
Versorgungsspannung für empfänger und servos<br />
eine störspannung erzeugt (analog zur servointernen<br />
impulsfrequenz der motoransteuerung), deren größe<br />
in mV erfasst wird. Werte unter 500 mV sind nach<br />
unseren erfahrungen in der regel unkritisch, da diese<br />
lastsituation in der realität kaum auftritt und zudem<br />
noch eine glättung der spannung durch die Kondensatoren<br />
im empfänger selbst stattfindet. der gemessene<br />
Wert lässt allerdings rückschlüsse auf die servointerne<br />
entstörung zu (aufwand und Wirksamkeit).<br />
Die in SMD-Technik bestückte Elektronikplatine ist mit<br />
den Triebwerks- (rote Punkte) und Potianschlüssen (blaue<br />
Punkte) direkt verlötet. Links ist das Servoanschlusskabel<br />
angelötet und zusätzlich zugentlastend verklebt