

Physik Skript 1 - Herzo Media
Physik Skript 1 - Herzo Media
Physik Skript 1 - Herzo Media

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1. Einführung<br />
Was ist <strong>Physik</strong><br />
Teil der Naturwissenschaft „unbelebte Natur“ Übergang zur Chemie (fließend)<br />
Ing. Wiss: Übertragung bekannter phys. Gesetze auf techn. Probleme -> industrielle<br />
Praxis<br />
z.B. Maschinenbau, Starkstromtechnik, Elektronik aber auch Beschleuniger,<br />
Raumfahrttechnik,…<br />
Erkenntnisse in der <strong>Physik</strong>, opt. Täuschungen<br />
Experiment math. Modell<br />
2. Verallgemeinerung der Ereignisse<br />
1. Experiment 3. phys. Gesetze<br />
Verifikation & Messvorschriften<br />
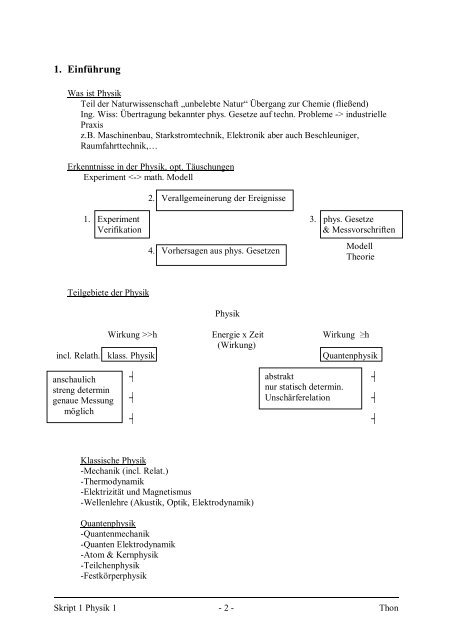
Teilgebiete der <strong>Physik</strong><br />
4. Vorhersagen aus phys. Gesetzen<br />
<strong>Physik</strong><br />
Wirkung >>h Energie x Zeit Wirkung h<br />
(Wirkung)<br />
incl. Relath. klass. <strong>Physik</strong> Quantenphysik<br />
anschaulich<br />
streng determin<br />
genaue Messung<br />
möglich<br />
¡<br />
¡<br />
¡<br />
Klassische <strong>Physik</strong><br />
-Mechanik (incl. Relat.)<br />
-Thermodynamik<br />
-Elektrizität und Magnetismus<br />
-Wellenlehre (Akustik, Optik, Elektrodynamik)<br />
Quantenphysik<br />
-Quantenmechanik<br />
-Quanten Elektrodynamik<br />
-Atom & Kernphysik<br />
-Teilchenphysik<br />
-Festkörperphysik<br />
abstrakt<br />
nur statisch determin.<br />
Unschärferelation<br />
Modell<br />
Theorie<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 2 - Thon<br />
¡<br />
¡<br />
¡
Phys. Größen<br />
Das SI System (seit 1978 gesetzl. Maßstab)<br />
phys. Größe beschreibt Zustand: Größe muss messbar sein!<br />
Si System: 7 Größen<br />
G = {G} x [G]<br />
Symbol Zahlenwert Einheit<br />
Einheit Zeit Länge Masse Elektr.<br />
Stromstärke<br />
Temperatur Lichtstärke Stoffmenge<br />
Größe sek. Meter kg Ampère Kelvin Candela mol<br />
Naturgesetze:<br />
Aus dem gemess. Zusammenhang phys. Größen werden Naturgesetze formuliert:<br />
z.B.: - Gravitationsgesetz<br />
- Coulombgesetz<br />
- Induktionsgesetz<br />
Darin treten Proportionskonstanten auf: Naturkonstanten<br />
• entweder per Definition einen gewissen wert zuordnen z.B.:<br />
e= 2,997924 x 10 8 m/s<br />
0 = 4 ¡ x 10 -7- Vs/Am<br />
• oder genau messen z.B.:<br />
• Grav.-Konstante ¢ = 6,67x 10 -11 Nm 2 /kg 2<br />
• Avogadrokonstante NA = 6,0221367 x 10 23 Teilchen/mol<br />
• Elementarladung e= 1,60217733 x 10 -19 As<br />
• Plancksche Wirkungsquandrum n= 6,6260 x10 -34 Js<br />
4,13567 x 10 -15 eVs<br />
Messgenauigkeit (Messen einer phys. Größe):<br />
• durch Vergleich mit SI-Größen (nach SI-Vereinbarung)<br />
oder<br />
• durch ein darauf geeichtes Messverfahren<br />
γ 1 2<br />
γ<br />
2<br />
M M<br />
F =<br />
g<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 3 - Thon
Fehler:<br />
Systematische Fehler zufällige statistische Fehler<br />
Aus Fehleranalyse/-rechner Historgramm der Häufigkeit<br />
N i ( xi<br />
)<br />
Häufigkeit hi für Messwerteintervall xi: hi<br />
=<br />
N<br />
Bei großer Zahl N der Versuche in „Glockenkurve“ über:<br />
mit:<br />
exp<br />
£<br />
¡ ¢ ¤ ¥ ¦ h ( x)<br />
=<br />
1<br />
2<br />
2πδ<br />
2<br />
( x − μ)<br />
§∞<br />
− nomiert auf h ( x)<br />
dx = 1<br />
2<br />
2δ<br />
0<br />
x = Messwert<br />
= Erwartungswert „wahrer Wert“<br />
= Varianz<br />
¨ 2<br />
¨ = Streuung<br />
ω ( x, x + dx)<br />
= h(<br />
x)<br />
⋅ dx<br />
Häuffigkeit<br />
− 3δ<br />
-δ + δ + 3δ<br />
68,3%<br />
95,4%<br />
99,7%<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 4 - Thon<br />
xi<br />
x
Schätzwerte aus den gemessenen Verteilungen:<br />
1. arithmetischer Mittelwert<br />
1<br />
x =<br />
N<br />
i<br />
x<br />
bester Schätzwert für<br />
¡ ¡<br />
¢<br />
2. Summe der Fehlerquadrate<br />
2<br />
Ei<br />
x = ( xi<br />
2<br />
− x)<br />
i<br />
i<br />
3. Standartabweichung S =<br />
E 2<br />
i<br />
bester Schätzwert für Streuung<br />
N −1<br />
4. Standartabweichung für x : Δx<br />
=<br />
S<br />
„Messwertfehler“ für x<br />
N<br />
2. Mechanik<br />
2.1. Einführung<br />
W<br />
[Anmerkung: siehe Hering ab S.9 oder Stroppe ab S.513]<br />
− Allg. Grundlage der <strong>Physik</strong><br />
− Anwendung in allen Teilgebieten der <strong>Physik</strong><br />
− Bewegung von Objekten im Raum und Zeit<br />
Für quant. Aussagen: Maßeinheit für Raum (→Länge und Zeit )<br />
2.2. Bewegung des Massenpunkts (MP)<br />
− Zeitmessung<br />
Objekt: Zeit wird gemessen durch Bezug auf periodische Vorgänge<br />
Erddrehung, Planetenbewegung, Urpendel, Schwingquarz<br />
1d zu 24h zu 60min zu 60s<br />
mitt. Sonnentag: 1d =ˆ 86400s mittl. Sonnensekunde:<br />
1a =ˆ 365 ¼d π<br />
→1s über Cs-Atom<br />
≈ 10 7 s Erddrehung nicht konst.<br />
Heute:<br />
Quarzuhren → elektr. angeregte Schwingung eines Quarzes ~ 1MHz<br />
Δt<br />
t<br />
8<br />
10 −<br />
≥<br />
1<br />
Frequenz υ ( f ) ←⎯→ TPeriodeυ<br />
= [Hz]<br />
T<br />
Messung der Lichtgeschwindigkeit, zuerst durch o-Römer (1676 „Jupitermonde“)<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 5 - Thon
Fundamentale, exp. bestimmte Annahme: Lichtgeschwindigkeit in allen Bezugssystemen<br />
konst. (Einstein spez. Relationstheorie 1905)<br />
1<br />
Längenmessung: 1m ≅<br />
Abstand Pol Äquator (→ Pariser Normalmeter)<br />
10.<br />
000.<br />
000<br />
Def. des Meters heute:<br />
1m = 165076373 ∴λKr<br />
86 Kr: Orange λKr = 605.8 nm<br />
λ<br />
Kr<br />
Michelson Interferometer<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 6 - Thon<br />
1<br />
Schirm<br />
2
Messung großer Längen:<br />
Triangulation<br />
Euklid: α + β + γ = 180°<br />
a b<br />
Sinussatz: =<br />
sin α sin β<br />
Messung astronomischer Entfernung<br />
L<br />
L, α , β,<br />
⎯⎯→<br />
L auf 10% Erdradius<br />
EM<br />
LES (in RE) auf Faktor 10<br />
¡<br />
¡<br />
¢<br />
¡ =90°<br />
¡<br />
LES<br />
s<br />
Winkel ϕ = [ rad ] Bogenmaß<br />
r<br />
1 rad = ˆ 57,<br />
3°<br />
1° ˆ= 17,<br />
5mrad<br />
Kleinwinkel Nähe<br />
sin ϕ ≈ tanϕ<br />
≈ ϕ[<br />
rad ]<br />
2<br />
ϕ<br />
cosϕ<br />
≈ 1−<br />
2<br />
rad 1
AE<br />
E<br />
2AE<br />
. S<br />
Parallaxe →scheinbare Beweg erdnaher Sterne vor<br />
Fixsternhimmel<br />
Winkeleinheiten:<br />
1′′<br />
1°<br />
= ˆ 60′<br />
(min) ≅ 60×<br />
60<br />
′′ ( sek)<br />
1<br />
3600<br />
1cm<br />
= ˆ<br />
2cm<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 8 - Thon<br />
¤ ¥ = £<br />
Erreichbar (terrestisch) : 0 , 1′′<br />
(Astronomisch): 0 , 01′′<br />
Astronomische Längeneinheit (AE): Große Halbachsen der Erdbahn<br />
− Par sec [pc]:<br />
1,<br />
5×<br />
10<br />
1pc<br />
= ˆ<br />
tan1<br />
Lichtjahr :<br />
11<br />
11<br />
m<br />
1LJ<br />
= 9,<br />
45×<br />
10<br />
d<br />
15<br />
¦<br />
m<br />
3×<br />
10<br />
1 AE= 1,495x10 11 m<br />
Parallaxenmethode brauchbar bis ~ 100LJ = 30pc<br />
16<br />
m<br />
§<br />
1pc = 3,26 LJ<br />
¢<br />
¡<br />
°<br />
1AE<br />
1AE<br />
d =<br />
≈<br />
tanδ<br />
δ
2.2.1. Kinematik des Massenpunktes<br />
− Geradlinge Bewegung (1Ortkorrd. : x = f(t) = x(t)<br />
Δx<br />
dx<br />
Momentangeschwindigkeit v(t) = = = x<br />
Δt<br />
dt<br />
lim Δt→0<br />
¡ Δv<br />
dv<br />
Momentanbeschleunigung a(t) = = = v<br />
Δt<br />
dt<br />
4 facher Weg =ˆ doppelter Zeit<br />
Wie x=f(t), damit x (2t0)=4x(t0)<br />
4<br />
4<br />
1<br />
4<br />
x<br />
Gleichung des freien Falls:<br />
g<br />
x(<br />
t)<br />
= t<br />
2<br />
v(<br />
t)<br />
= gt<br />
a(<br />
t)<br />
= g<br />
2<br />
g= Erdbeschleunigung<br />
X2<br />
X1<br />
x<br />
lim Δt→0<br />
g 2<br />
x(<br />
t0<br />
) = t<br />
2<br />
g<br />
x(<br />
2t0<br />
) = ( 2t<br />
2<br />
t1 t2<br />
0<br />
)<br />
2<br />
t<br />
g<br />
= 4 t<br />
2<br />
2<br />
0<br />
= 4x(<br />
t<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 9 - Thon<br />
0<br />
)<br />
t
Umkehrung der Differentiation: Integration<br />
t<br />
aus a(t)→v(t) [ ] T T =<br />
aπ<br />
dT + v a(<br />
t)<br />
dt<br />
aus v(t)→x(t) x0+¡t<br />
v(<br />
T ) dT<br />
a(t) = const.<br />
v(t) = v0+at<br />
0<br />
x(t) = x0+v0t+<br />
Kinematik des Massenpunktes :<br />
x<br />
0<br />
0<br />
T = 0<br />
Kartesicher 3D Fall: r ( t)<br />
= r(<br />
t),<br />
y(<br />
t),<br />
z(<br />
t)<br />
Analog zu 1D Fall<br />
¢<br />
Geschwindigkeit<br />
2<br />
2 t<br />
a<br />
v ( t )<br />
=<br />
oder<br />
dx<br />
dt<br />
Gleichförmige beschleunigte Bewegung<br />
Ortsvektor r(t)<br />
© ¨<br />
lim<br />
=<br />
Δ →<br />
¤<br />
0<br />
r<br />
,<br />
¥ ¦ §<br />
¤<br />
dy<br />
dt<br />
= ( x,<br />
y , z )<br />
© ¨<br />
Bahnkurve<br />
r ( t + Δ t ) − r ( t )<br />
Δ t<br />
dz<br />
,<br />
dt<br />
£<br />
§ ¦<br />
¨©<br />
¥<br />
£<br />
£<br />
§ ¦<br />
¥<br />
¤<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 10 - Thon<br />
y
a(t)=…=<br />
dv<br />
dt<br />
¦<br />
= ¤ ¥ £ £<br />
2<br />
d x<br />
dt<br />
Ableitung nach t: Punkt<br />
¡<br />
¢<br />
,<br />
£ ¤ ¥ £<br />
2<br />
d y<br />
dt<br />
¡<br />
¢<br />
,<br />
£ ¤ ¥ £<br />
2<br />
d z<br />
dt<br />
Bsp: Wurf mit horizontaler Anfangsgeschwindigkeit<br />
a(<br />
t)<br />
=<br />
( 0<br />
− g)<br />
§ v0<br />
( t)<br />
= ( v0<br />
, 0)<br />
Anfangsbedingung<br />
r(<br />
t = 0)<br />
= r = ( 0,<br />
0)<br />
§<br />
0 §<br />
Bewegung in x,y unabhängig<br />
= ¨<br />
v ( t)<br />
v ( 0)<br />
+ a ( τ ) dτ<br />
x<br />
= v<br />
0<br />
+ 0<br />
x<br />
= ©<br />
v ( t)<br />
v ( 0)<br />
+ a ( τ ) dτ<br />
y<br />
= 0 +<br />
x(<br />
t)<br />
= x<br />
y<br />
t<br />
0<br />
t [ − gτ<br />
] = −gt<br />
0<br />
0<br />
y(<br />
t)<br />
= y<br />
0<br />
+<br />
+<br />
<br />
<br />
x = v t → t<br />
0<br />
t<br />
0<br />
t<br />
0<br />
2<br />
0<br />
t<br />
0<br />
2<br />
x<br />
y<br />
v ( τ ) dτ<br />
= 0 +<br />
2<br />
0<br />
t [ v τ ]<br />
g<br />
( −gτ<br />
) dτ<br />
= 0 − t<br />
2<br />
x<br />
=<br />
v<br />
g<br />
→ y(<br />
x)<br />
= −<br />
2v<br />
Ebene iA gekrümmte Bewegung<br />
0<br />
0<br />
2<br />
¡<br />
¢<br />
= v<br />
Annahme:<br />
Geschwindigkeit v = v const. entlang der Bahnkurve <br />
v<br />
(t)<br />
2<br />
0<br />
0<br />
t<br />
x<br />
2<br />
v( t + Δt)<br />
<br />
v =<br />
v( t + Δt)<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 11 - Thon<br />
0<br />
( v0<br />
v<br />
<br />
, 0)<br />
(t)<br />
x<br />
Δ v
Δv<br />
v<br />
= Δϕ<br />
Obwohl v ¡<br />
dv<br />
Δ const. ist a¢<br />
= ≠ 0 Richtungsänderung<br />
dt<br />
Vektorielle Zerlegung der Beschleunigung<br />
dv<br />
dt<br />
dv<br />
=<br />
dt<br />
d s<br />
dt<br />
dϕ<br />
= v<br />
dt<br />
2<br />
Tangential: at = = 2<br />
normal:<br />
Speziell:<br />
a n<br />
£<br />
Kreisbewegung: Massenpunkt auf Kreisbahn (r = const.)<br />
¢<br />
Beste Wahl des Koordinaten Systems (KS): Polar Koordinaten<br />
x( t)<br />
= r(<br />
t)<br />
cosϕ<br />
( t)<br />
y( t)<br />
= r(<br />
t)<br />
sin ϕ(<br />
t)<br />
dϕ<br />
x t r ϕ t x ¤<br />
( ) = cos ( ) = −r<br />
¥ sin ϕ(<br />
t)<br />
×<br />
dt<br />
dϕ<br />
y(<br />
t)<br />
= r sin ϕ ( t)<br />
y = r § cosϕ<br />
( t)<br />
×<br />
dt<br />
v =<br />
dr<br />
dt<br />
<br />
=<br />
<br />
dx<br />
dt<br />
¦<br />
<br />
© ¨<br />
2<br />
<br />
+ <br />
zusätzlich: v= const.<br />
dy<br />
dt<br />
Winkelgeschwindigkeit:<br />
<br />
© ¨<br />
2<br />
dϕ<br />
= r<br />
dt<br />
dϕ<br />
→ = const.<br />
dt<br />
d ϕ v<br />
ω = =<br />
dt r<br />
v =<br />
Über ϕ ( t) = ωt<br />
können wir schreiben ω = const.<br />
2<br />
2<br />
( sin + cos ϕ)<br />
norm<br />
dϕ<br />
dϕ<br />
ϕ = r<br />
dt dt<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 12 - Thon<br />
r<br />
2<br />
x(<br />
t)<br />
= r cosωt<br />
y(<br />
t)<br />
= r sin ωt<br />
Beschleunigung bei Kreisbewegung mit v= const. Gleichförmig<br />
<br />
r<br />
Δ ϕ<br />
<br />
<br />
Δ s<br />
tang
dv<br />
a(<br />
t)<br />
= = 0<br />
dt<br />
2<br />
dϕ<br />
2 v<br />
an<br />
= v = vω<br />
= rω<br />
=<br />
dt<br />
r<br />
↓<br />
y<br />
s s’<br />
n * t<br />
rω<br />
2<br />
2 v<br />
Radiale Beschleunigung ar = −rω<br />
= − nach innen Zentripetalbeschleunigung<br />
r<br />
2<br />
v<br />
Vektorschreibweise: a = − rˆ<br />
r<br />
¡<br />
r<br />
Einheitsvektor rˆ<br />
= r = 1<br />
r<br />
Ungleichförmige Kreisbewegung: ω = ω(t)<br />
2<br />
dv d d ϕ<br />
ω<br />
= r = r<br />
dt dt dt<br />
¢<br />
Winkelbeschleunigung<br />
Wechsel von Koordinatensystem:<br />
2<br />
Koordinatentransformation bei Parallelverschiebung<br />
y’<br />
A const<br />
x<br />
x<br />
x’<br />
x’<br />
£ £ £<br />
r ′ = r − A<br />
Koordinatentransformation bei bewegten Koordinatensystemen:<br />
Einfacher Fall:<br />
¤<br />
£ £ ¤ £ £<br />
v′<br />
= r − A = v<br />
d.h. v ¥ ¥ , a invariant gegen Paralellverschiebung<br />
x′<br />
= x − ut<br />
y′<br />
= y<br />
z′<br />
= z<br />
( t′<br />
= t)<br />
Nur gültig für u
2.3. Grundgesetz der klassischen <strong>Physik</strong>:<br />
1686 Newton/ Phil. Nat. Princ. Math.<br />
Absolute Euklische Geometrie<br />
Grundgedanke: Kraft als Ursache der Beschleunigung<br />
• Kinematische Größe v ¥ ¥ , a<br />
• Masse m, Kraft F<br />
Schlitten auf Luftkissenbahn<br />
Bewegung im Raum, Koordinatensystemen, Vektoren<br />
Einteilung phys. Größen<br />
Kartesisches Koordinatensystem:<br />
x<br />
¡<br />
a =<br />
x<br />
az<br />
ax<br />
z<br />
( ax<br />
, a y , a z )<br />
2<br />
x<br />
2<br />
y<br />
ay<br />
¢<br />
a = a = a + a + a<br />
2<br />
z<br />
£<br />
Multiplikation mit Skalar k a = ( kax<br />
+ ka y + kaz<br />
)<br />
y<br />
m<br />
Aufnehmer<br />
F= m*g<br />
• Skalar 1 Zahl (Zeit, Masse, Temp.)<br />
• Vektor Betrag („Länge“) und Richtung<br />
Addition. Komponentenweise<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 14 - Thon
Polar Koordinaten:<br />
y<br />
r<br />
x<br />
Eben x,y:<br />
x = r cosϕ<br />
y = r sin ϕ<br />
Räumlich (x, y ,z):<br />
2.3.1. Kräfte und fundamentale Wechselwirkung<br />
¢ ¢ 1<br />
NG II Bewegungsgleichung a = F<br />
m<br />
Masse: Maß für Trägheit (träge Masse)<br />
Kraft F ¡<br />
: Ursache für Geschwindigkeitsänderungen oder Deformation<br />
Gewichtskraft:<br />
£ Verfahren eines Balkens<br />
Federkraft, kompensiert im Ggw die Gewichtskraft<br />
Reibungskraft Einheit der Kraft 1 Newton= 1N<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 15 - Thon<br />
F ¡<br />
x = r sin ϑ cosϕ<br />
y = r sin ϑ sin ϕ<br />
z = r cosϑ<br />
Laser<br />
1 Newton ist die Kraft die die Masse m= 1kg mit a=1m/s 2 beschleunigt £ 1N=kgm/s 2<br />
Kraft ist Vektorkraft £<br />
F2<br />
F1<br />
F1 + F2<br />
vekt. Addition von Kräften<br />
Kräfteparallelogramm
Schiefe Ebene<br />
F<br />
F<br />
F<br />
T<br />
+ F<br />
N<br />
Fg = mg<br />
T<br />
N<br />
= F<br />
G<br />
= mg sin α<br />
= mg cosα<br />
FN<br />
Reibungskraft = Entgegen der Bewegungsrichtung<br />
Ansatz: FR = μFN<br />
( μ H > μG<br />
)<br />
μ = Re ibungskoeffizient, μ H = Haftreibung,<br />
μG<br />
=<br />
Bedingung für Gleiten F > FR,<br />
GL<br />
mg sin α > μ mg cosα<br />
α > tg<br />
μ = tgα<br />
G<br />
−1<br />
μ<br />
G<br />
G<br />
Grenzwinkel<br />
¡<br />
z.B.: μ G = 0, 1 α = 5,<br />
7°<br />
Jetzt zu NG III (actio= reactio)<br />
Fundamentale Kräfte<br />
1. Gravitation:<br />
FT<br />
Gleitreibung<br />
Zwei Körper der Massen m1 und m2 ziehen sich gegenseitig mit der Kraft F an, für dir<br />
gilt:<br />
m1m<br />
2<br />
F = γ 2<br />
r<br />
2<br />
−11<br />
Nm<br />
γ = 6,<br />
6726×<br />
10 2<br />
kg<br />
Feldteilchen: Gravitonen noch nicht entdeckt<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 16 - Thon
Von oben:<br />
Spiegel<br />
„Hantel mit 2x mam Quarzfaden“<br />
2. Elektrische Kraft<br />
F el<br />
mit<br />
m<br />
1<br />
=<br />
4πε<br />
0<br />
0<br />
×<br />
1<br />
9<br />
≅ 9×<br />
10<br />
4πε<br />
Q<br />
1 2<br />
2<br />
0<br />
r<br />
Q<br />
( ) N<br />
2<br />
m<br />
2<br />
As<br />
Elektrische Kraft extrem stark im Vergleich mit der Gravitation:<br />
10<br />
6<br />
2x 1As im Abstand 1m: F ≈ 10 N = ˆ Gewichtskraft<br />
10 t<br />
3. Starke Wechselwirkung zwischen Quarks<br />
4. Schwache Wechselwirkung zwischen Quarks und Leptonen (e - , e + , + ,<br />
(Feldteilchen: Z 0 , W +- )<br />
5. Elektromagnetische Wechselwirkung Feldteilchen: Photonen<br />
Daraus abgeleitete Kräfte:<br />
− Reibungskräfte<br />
− Seilkräfte<br />
− Elastische Kräfte (Federkraft, Deformationskraft)<br />
− Chemische Bindungskräfte<br />
− Kernkraft (zwischen Nukleonen im Kern)<br />
Bemerkung zur Masse:<br />
Laser<br />
In NG I-III: Träge Masse<br />
Im Gravitationsgesetz: Schwere Masse<br />
- , …)<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 17 - Thon
2.4. Anwendung der Newtonschen Gesetze<br />
2.4.1. Federpendel:<br />
Δ l = l − = prop. Zum Gewicht m × g<br />
0 0 l0<br />
Federkraft:<br />
FF = kΔl<br />
N<br />
[k]=<br />
m<br />
k= Federkonstante<br />
In Ruhelage:<br />
Fresult = FF<br />
+ FG<br />
= −kl<br />
0 + mg<br />
Auslenkung aus der Ruhelage £<br />
x § §<br />
F<br />
res<br />
= mg − kl<br />
= mg − k(<br />
l − l<br />
= mg − kl<br />
¦<br />
l0<br />
¥ ¤ ¡<br />
= 0<br />
£ ¢ ¡<br />
= −kx(<br />
t)<br />
k<br />
( t)<br />
+ x(<br />
t))<br />
= 0<br />
m<br />
l<br />
0<br />
0<br />
x(<br />
t)<br />
0<br />
+ l<br />
− kx(<br />
t)<br />
0<br />
)<br />
Ruhend<br />
FFeder<br />
FGewicht<br />
Schwingung um Ruhelage !<br />
DGL der freien, ungedämpften Schwingung<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 18 - Thon
x(<br />
t)<br />
= Acosωt<br />
x(<br />
t)<br />
= −Aω<br />
sin ωt<br />
2<br />
x(<br />
t)<br />
= −Aω<br />
cosωt<br />
2<br />
= −ω<br />
x(<br />
t)<br />
DGL erfüllt mit<br />
Versuch:<br />
m=50<br />
l(50)=10cm<br />
k =<br />
=<br />
0,<br />
5N<br />
0,<br />
1m<br />
N<br />
5<br />
m<br />
2<br />
ω<br />
=<br />
k<br />
m<br />
x = Acosωt<br />
ist spezielle Lösung mit den Anfangsbedingungen:<br />
x(t=0)= A v(t=0)= 0<br />
Andere spezielle Lösung ist:<br />
x( t)<br />
= Asin<br />
ωt<br />
x(t=0)= 0 v(t=0)= ω A<br />
Allgemeine Lösung:<br />
x(<br />
t)<br />
= a sin ωt<br />
+ b cosωt<br />
v(<br />
t)<br />
= aω<br />
cosωt<br />
− bω<br />
sin ωt<br />
2<br />
2<br />
2<br />
a(<br />
t)<br />
= −ω<br />
a sin ωt<br />
−ω<br />
bcosωt<br />
= −ω<br />
x(<br />
t)<br />
Anfangsbedingung:<br />
x(0)= b<br />
v(0)= ω a<br />
Amplitude A=<br />
2π<br />
ω =<br />
t<br />
= 0,<br />
63s<br />
2 2<br />
a + b<br />
Kreisfrequenz<br />
= 2π<br />
× 0,<br />
1s<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 19 - Thon<br />
T<br />
= 2π<br />
m<br />
k<br />
ω =<br />
k<br />
m<br />
0,<br />
5kgms<br />
= 2π<br />
5kgm<br />
k<br />
m<br />
2<br />
2<br />
ω<br />
= ( 2πf<br />
)<br />
1<br />
f =<br />
T<br />
2
− N. Kopernikus (1473- 1543) Heliozentrisches Weltbild<br />
− T. Brake (11546- 1601) Exakte Beobachtung<br />
− J. Kepler (1571- 1630) Kepler’sche Gesetze<br />
− I Newton (1643- 1727) Herleitung. der KG aus den NG und Gravitationsgesetz<br />
Kepler’sche Gesetze:<br />
I. Planetenbewegung auf Ellipsen in deren einem Brennpunkt die Sonne steht<br />
II. Der von der Sonne zum Planeten reichende Radiusvektor v überstreicht in gleichen<br />
Zeiten Δt gleiche Flächen Δ A<br />
ΔA<br />
= const.<br />
Δt<br />
III. Die Quadrate der Umlaufzeiten T1 und T2 zweier Planeten Verhalten sich wie die<br />
Kuben der großen Halbachse a1 und a2<br />
2 3<br />
T 1 a1<br />
= 2 3<br />
T a<br />
Speziell: Kreisbahn (a= b= r Sonne im Zentrum)<br />
az= agrav<br />
2<br />
v 2 M s<br />
= rω<br />
= γ<br />
2<br />
2<br />
r<br />
2 2<br />
r ω = γM<br />
= const ∀<br />
3<br />
γ γ<br />
KG III = M<br />
3 2 s =const<br />
T 4π<br />
aus r, T, γ ¡<br />
r<br />
Planetenbahnen<br />
2<br />
2<br />
30<br />
¢<br />
Masse des Zentralgestirns berechen (hier Sonne) = 2 , 0×<br />
10 kg<br />
Aus Monddaten Masse der Erde:<br />
rm = 3,84x10 8 m Tm =27,3d ¡<br />
ρ<br />
E<br />
=<br />
M<br />
= 5,<br />
5<br />
Erde<br />
3<br />
4 3<br />
πR<br />
cm<br />
E<br />
3<br />
g<br />
An der Oberfläche ρ ≈ 2, 7 3<br />
cm<br />
Erde hat schweren Kern: Flüssig Fe, Ni<br />
g<br />
MErde = 5,97x10 24 kg<br />
M Sonne<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 20 - Thon
1. m außerhalb der Kugel mit Masse M<br />
R d<br />
2. m innerhalb der Kugel M:<br />
F<br />
Gewischtskraft<br />
F<br />
G<br />
M<br />
= γ<br />
R<br />
¢<br />
g<br />
E<br />
2<br />
E<br />
Mit ME, RE, γ ¡<br />
¡<br />
d<br />
−<br />
= γ<br />
m = mg<br />
Mrsd<br />
2<br />
d<br />
m<br />
g= 9,818 2<br />
s<br />
Kraft so, als ob Kugelmasse M im Zentrum<br />
nur Masse immer r=d trägt bei<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 21 - Thon
F<br />
t<br />
2.4.2. Schwerependel oder Math. Pendel<br />
(harmonische Schwingung bei kleiner Auslenkung)<br />
= mg sin ϕ<br />
s = l* ~ x<br />
l<br />
x<br />
s<br />
für rad¢<br />
¤ ¥ ¦ sin ϕ ≈ ϕ ϕ
2.4.4. Gültigkeitsbereich der Newton’schen Mechanik<br />
Prinzipielle Schranken für Kenntnis der Entwicklung eines Systems in der Zukunft<br />
1. Chaotisches Verhalten nicht lin. Systeme<br />
− Wetter<br />
− Turbulente Strömungen<br />
2. Quantenphysik<br />
Unschärferelation: Ort und Impuls nicht gleichzeitig genau messbar<br />
¡<br />
h<br />
Δx<br />
× Δp<br />
x ≥ =<br />
2π<br />
2<br />
34 m<br />
= 10 kg<br />
s<br />
Genauigkeit der Anfangsbedingung beschränkt<br />
2.5. Der Impuls<br />
Def. Impuls: Masse x Geschwindigkeit<br />
Erhaltungsgröße für abgeschlossene Systeme P ¢ ¢ = mv<br />
2.5.1. Der Kraftstoß<br />
NG II m<br />
£<br />
a = F<br />
F(t)<br />
t1<br />
£<br />
d<br />
¤<br />
v<br />
a<br />
dt<br />
d p¥<br />
¦<br />
= F<br />
d p F(<br />
t<br />
¦<br />
= )<br />
¥<br />
dt<br />
dt<br />
t2<br />
¤<br />
t<br />
Δp<br />
=<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 23 - Thon<br />
<br />
p<br />
<br />
2<br />
− p<br />
<br />
1<br />
=<br />
t<br />
t<br />
<br />
2<br />
1<br />
<br />
§<br />
F(<br />
t)<br />
dt<br />
<br />
Kraftstoß<br />
© ¨§
¤<br />
2 £<br />
1<br />
F( t)<br />
dt = ˆFläche<br />
≈ FΔt<br />
Δp<br />
Δp gegeben F = F<br />
Δt<br />
Um Kraft zu minimieren, muß Δt möglich groß sein! (Knautschzone)<br />
Stahlkugel auf Unterlage (Stall)<br />
g<br />
h = t<br />
2<br />
t =<br />
r ¡<br />
3<br />
2<br />
2h<br />
g<br />
¥ ¦ ¨<br />
v(t)=g(t) v = 2<br />
Δ = 40,<br />
001kg<br />
0,<br />
04Ns<br />
10<br />
F = = −5<br />
4x10<br />
s 10<br />
m3<br />
r ¢<br />
2<br />
m2<br />
r 1<br />
m<br />
s<br />
=<br />
m1<br />
m<br />
g h = 2<br />
s §<br />
m 0,<br />
2m<br />
10<br />
s<br />
0,<br />
04<br />
−2<br />
−5<br />
Ns<br />
N = 10<br />
3<br />
m=10g h=0,2m p = 2 mv = FΔt<br />
N<br />
2.5.2. Systeme von Massenpunkten (MP)<br />
Def. Schwerpunkt:<br />
<br />
p <br />
1<br />
rs =<br />
M<br />
n<br />
mi<br />
i=<br />
1<br />
dri<br />
1<br />
=<br />
dt M<br />
p<br />
Impuls des SP:<br />
= Mv<br />
= m v = p<br />
s<br />
©<br />
s<br />
i<br />
(Summe der Einzelimpulse)<br />
<br />
<br />
i<br />
©<br />
Bisher: 1MP + äußere Kraft<br />
Δ 1<br />
Neu: Mehrer MP + innere Kräfte (zwischen MP’s) + äußere Kräfte<br />
i<br />
i<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 24 - Thon
Einfluss von Kräften:<br />
Fi= äußere Kraft Fik= innere Kraft<br />
1. 2.<br />
F1<br />
d p<br />
1 1) = F1<br />
+ F12<br />
dt<br />
d p<br />
1 2) = F2<br />
+ F21<br />
dp<br />
dt<br />
s<br />
dt<br />
¡<br />
dp<br />
=<br />
dt<br />
1<br />
dp<br />
+<br />
dt<br />
¡<br />
¡<br />
2<br />
= F + F =<br />
§<br />
1<br />
§<br />
2<br />
=<br />
F<br />
¥ ¦<br />
§<br />
0(<br />
¤ ¢<br />
12<br />
+ F<br />
wegenNGIII )<br />
§<br />
¢£<br />
21<br />
¨ © © ©<br />
Ergebnis:<br />
d ps<br />
dt<br />
dvs<br />
= M =<br />
dt i<br />
Fi<br />
(Summe der äußeren Kräfte)<br />
Def.:<br />
Abgeschlossen (mech.) System: F = 0 (Summe der äußeren Kräfte = 0)<br />
Im abgeschlossenen System ist der Gesamtimpuls s p konstant<br />
ps pi<br />
= const<br />
<br />
= <br />
F12<br />
2.6. Stoßprozesse<br />
F2<br />
<br />
Wichtig wegen:<br />
- Struktur kleinster Systeme aus Streuexperimnet<br />
- kinetische Gastheorie<br />
2.6.1. Eindimensionaler Fall<br />
<br />
<br />
<br />
Impulssatz: v + m v = m v '+ m v <br />
<br />
'<br />
m1 1 2 2 1 1 2 2<br />
gegeben<br />
gesucht <br />
Zu wenig ! 1 Gleichung für 2 Unbekannte<br />
1<br />
<br />
i<br />
i<br />
F<br />
2<br />
m1v1 m2v2<br />
m1v1 m2v2<br />
vorher nachher<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 25 - Thon
1) Elastische dh. auch Ekin enthalten<br />
1 2<br />
Ekin= mv<br />
2<br />
Energiesatz:<br />
1 2 1 2 1 2 1<br />
m 1v1<br />
+ m2v<br />
2 = m1v1<br />
' + m<br />
2 2 2 2<br />
2<br />
v<br />
'<br />
2<br />
2<br />
2 Größen aus 2 Gleichungen => Übungen<br />
2) Grenzfall: Total inelastisch<br />
v1’= v2’ (= vs’)<br />
nur noch eine Unbekannte d.h. Impulssatz ausreichend<br />
1<br />
M<br />
v2 = ps<br />
m1v<br />
=<br />
m<br />
2.7. Arbeit und Energie<br />
1<br />
1<br />
+ m2v<br />
+ m<br />
2.7.1. Beispiel Federschwingung<br />
2<br />
2<br />
1 2<br />
Masse m mit v0=v(x=0) und Ekin = mv 0<br />
2<br />
Staucht Feder aus Ruhelage bei x=0 und wird dadurch abgebremst<br />
d d 1 2 1 dv<br />
Ekin<br />
= mv ( t)<br />
= m2v(<br />
t)<br />
= Fv<br />
dt dt 2 2 dt<br />
Im Intervall dt gilt: dEkin= Fdx = -kxdx<br />
E<br />
Abnahme<br />
¥<br />
kin<br />
§ ¤ ¢<br />
( x)<br />
− E<br />
von<br />
¦ £ ¢<br />
E<br />
0<br />
kin<br />
=<br />
E ( x)<br />
¥<br />
2<br />
E<br />
¨<br />
0<br />
dE<br />
kin<br />
−<br />
m,v(t)<br />
= −k<br />
¢ ¢ ¢ ¢ ¤ ¢<br />
1x<br />
x<br />
0<br />
Änderung<br />
¨<br />
der<br />
E<br />
¢ ¢ ¢ ¢ £ ¢<br />
pot<br />
F<br />
a=<br />
m<br />
2<br />
x<br />
x!<br />
dx!<br />
= −k<br />
2<br />
¡<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 26 - Thon<br />
k
Def.:<br />
2<br />
x<br />
k<br />
2<br />
E ( x)<br />
Feder<br />
pot = Ekin(x) + Epot(x) = const = Eges<br />
Impuls + Kraftstoß<br />
p = mv<br />
p = F<br />
Δp<br />
=<br />
¡<br />
¡<br />
¡<br />
F(<br />
t)<br />
dt = FΔt<br />
¤<br />
Kraftstoß<br />
£<br />
¢<br />
¡<br />
Schwerpunkt eines Systems vom MP<br />
1<br />
¥ ¥ ¦ r s =<br />
M<br />
N<br />
miri<br />
i=<br />
1<br />
¨<br />
innere und äußere Kräfte:<br />
dps dt<br />
= Mvs<br />
= Fi<br />
Summe der äußeren Kräfte<br />
¨<br />
¨©<br />
§<br />
i<br />
2.7.2. Potentielle Energie und konservative Kräfte<br />
x2<br />
W12<br />
= Fdx<br />
Allg.: (1D)<br />
x1<br />
dW<br />
P = = Fv<br />
dt<br />
Potentielle Energie im 1D Fall<br />
E<br />
pot<br />
= −<br />
x<br />
x<br />
0<br />
Arbeit<br />
E<br />
Leistung<br />
F(<br />
x)<br />
dx + c (c ist beliebig wählbar)<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 27 - Thon<br />
Eges<br />
Ekin<br />
-Epot<br />
X
3D Fall:<br />
Gravitationskraft:<br />
r<br />
E ¢ ( r ) = Fdx<br />
+ c Wegintegral<br />
pot<br />
SkalaresFeld<br />
¦<br />
¥<br />
£<br />
¤<br />
r Skalarprodukt<br />
0<br />
− Integration auf Kreis: Wegintegrall 0<br />
− Integration entlang r: Wegintegral maximal<br />
Konservatives Feld:<br />
¡<br />
¢<br />
£<br />
Epot ist nur Funktion des Ortes r § (Endpunkt von c) und nicht vom Integrationsweg abhängig<br />
(3D) ¨ )<br />
2 Folgerungen:<br />
1.<br />
F(<br />
r ) = − grad Ep(<br />
r ´<br />
2.<br />
( gradE<br />
( gradE<br />
( gradE<br />
©<br />
p<br />
p<br />
p<br />
∂E<br />
p<br />
) x =<br />
∂x<br />
∂E<br />
p<br />
) y =<br />
∂y<br />
©<br />
∂E<br />
p<br />
) z =<br />
∂z<br />
Differenti ©<br />
aloperator<br />
Erhaltung der mech. Energie<br />
E + r ) = const.<br />
= E<br />
( <br />
kin r ) E pot (<br />
<br />
r <br />
r <br />
c2<br />
0<br />
c1<br />
ges<br />
r <br />
Nicht konservative Kräfte:<br />
z.B.: - Reibungskräfte<br />
- Lorenzkraft<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 28 - Thon<br />
1<br />
r <br />
0<br />
c2<br />
c1
Bsp: Freier Fall (im homogenen Feld)<br />
F<br />
E<br />
grav,<br />
y<br />
pot<br />
= −mg(<br />
= const)<br />
= −<br />
y<br />
0<br />
F dy)<br />
= mg<br />
Fall aus der Höhe h:<br />
1<br />
2<br />
v(<br />
y)<br />
=<br />
g<br />
2g(<br />
h − y)<br />
y<br />
[ y′<br />
] + c = mgy<br />
Ek + E pot ( y)<br />
= const = E pot ( h)<br />
¡<br />
2<br />
mv ( y)<br />
+ mgy = mgh<br />
0<br />
=> weil Ek(h)=0<br />
Lösung ohne Bewegungsgleichung, weil Epot schon Integration enthält !<br />
Exkurs : Luftpistolenschuss auf Luftkissenfahrzeug<br />
Mit m ~ 200g und v’ ~ 0174m/s<br />
1<br />
v m = v′<br />
m<br />
400<br />
v = 400v′<br />
m<br />
v ≈ 70<br />
s<br />
ballistisches Pendel<br />
h<br />
y1<br />
Y<br />
Ek(y1)<br />
Ep(y)<br />
Epot(h)<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 29 - Thon<br />
E<br />
h<br />
1D
2.7.3. Berücksichtigung von Reibungskräften am Beispiel der schiefen<br />
Ebene<br />
1. Ohne Reibung<br />
©<br />
Bewegung entlang s<br />
F s<br />
dE<br />
dE<br />
= mg sin α ( Hangabtriebskraft)<br />
kin<br />
pot<br />
= Fds<br />
→ F ds<br />
¡ ¡<br />
= mgdy<br />
s<br />
= + = sin ¤ ¢ ¥ ¢ ¨£<br />
¢ ¦ ¥ §<br />
dE dE dE mg<br />
α ds − mg sin § ¦ £ ¢ αds<br />
= 0<br />
ges<br />
kin<br />
pot<br />
Gesamtenergie konstant!<br />
2. mit Reibung:<br />
<br />
<br />
F = μF<br />
entgegen zu v!<br />
R<br />
N<br />
dEkin<br />
<br />
¦ ¨ ¦<br />
<br />
Gesamtkraft: Fs = mg sin α − μmg<br />
cos<br />
<br />
<br />
α<br />
dE ges<br />
Y<br />
mg<br />
F<br />
S0<br />
FR<br />
= mg sin α ds − μmg<br />
cosαds<br />
≠ 0<br />
Gesamtenergie nicht konstant!<br />
Keine Epot definierbar<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 30 - Thon<br />
F<br />
N<br />
s<br />
dE pot<br />
<br />
F<br />
S0<br />
dy<br />
ds
d(<br />
E<br />
kin<br />
+ E<br />
pot<br />
)<br />
dt =<br />
− μF<br />
¢<br />
¡<br />
N<br />
v<br />
Leistung der Re ibungskraft<br />
Mechanische Gesamtenergie nimmt ab<br />
2.7.4. Einheiten von Energie, Arbeit und Leistung<br />
Energie, Arbeit [E]: 1W=Kraft x Länge; z.B.: 1N=1J=1Ws (im SI-System)<br />
Leistung [P]: =<br />
Kraft × Länge<br />
Zeit<br />
Elektr. Energie in kWh = 3,6 10 6 Ws<br />
Atomare Einheit : 1eV = 1,602 10 -19 J<br />
2.8. Drehbewegung<br />
SI: 1W=1N s<br />
2.8.1. Drehbewegung eines MP<br />
Neue Begriffe analog:<br />
Zur linearen Bewegung:<br />
− Drehmoment<br />
¤<br />
¤<br />
¤<br />
M = rF<br />
Grafik<br />
Vektorprodukt<br />
¥<br />
M = M =<br />
£<br />
rF sin α<br />
Drehmoment max für α = 90°<br />
− Drehimpuls:<br />
¦<br />
¦ ¦<br />
L = r × p<br />
Grafik<br />
Kreisbewegung (rω ):<br />
<br />
© ©<br />
©<br />
L =<br />
r × m(<br />
rω<br />
)<br />
© © ©<br />
© © ©<br />
mω(<br />
rr<br />
) − mr<br />
( rω<br />
)<br />
¨<br />
§<br />
Skalar Skalar<br />
kgm<br />
s<br />
m = 1 3<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 31 - Thon<br />
2
Arbeit:<br />
Skalarprodukt r ω = 0 , da r ⊥ ¡ ω¡<br />
L<br />
£<br />
Kreisbeweg ung<br />
= mr<br />
2<br />
J ω£ ¢<br />
− Trägheitsmoment eines MP bezüglich Ursprung<br />
J = mr 2<br />
L = J (analog; p = mv<br />
) ¥ ¤<br />
dL<br />
dt<br />
§<br />
=<br />
ω¤<br />
d<br />
dt<br />
( r × p)<br />
=<br />
§<br />
§<br />
dr<br />
dL<br />
× p r p<br />
¥<br />
+ × = = r × F = M<br />
dt<br />
dt<br />
§ ¦<br />
§<br />
¨ © = 0,<br />
da v p<br />
(analog: F p = )<br />
p = F<br />
ω<br />
<br />
<br />
d<br />
α =<br />
dt<br />
M = J<br />
<br />
α <br />
zeitlichab<br />
<br />
geleitet<br />
L = r × F = M<br />
<br />
2.8.2. Arbeit, Energie und Leitungen bei Drehbewegung<br />
ϕ<br />
1<br />
1<br />
0<br />
M ( ϕ) dϕ<br />
( Skalarprodukt)<br />
We <br />
Torsionsfeder: M Dϕ<br />
(Torsionskonst. D)<br />
1 2<br />
1<br />
W ϕ Dϕdϕ<br />
= Dϕ<br />
analog zu Feder: kx<br />
2<br />
2<br />
<br />
<br />
=ϕ<br />
0<br />
<br />
<br />
dW<br />
dt<br />
Momentane Leistung P = = M <br />
ω <br />
<br />
Fv<br />
<br />
ω<br />
§<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 32 - Thon<br />
r<br />
2<br />
F<br />
§<br />
<br />
. v<br />
§<br />
§<br />
§<br />
§
Def.: - rot = rotation<br />
- trans = translation<br />
E<br />
E<br />
rot<br />
kin<br />
trans<br />
kin<br />
1 2<br />
= Jω<br />
2<br />
1<br />
= mv<br />
2<br />
2<br />
2.8.3. Vergleich „linearer Bewegungen & Drehbewegung“<br />
M = -Dϕ<br />
[NG] M = Jα mit J = mr 2<br />
− Dϕ<br />
= Jα<br />
− Dϕ<br />
= ϕmr<br />
ϕ(<br />
t)<br />
= ϕ cosωt<br />
0<br />
ϕ(<br />
t)<br />
= −ϕ<br />
ω sin( ωt)<br />
0<br />
¡<br />
2<br />
2<br />
¡ ¡<br />
ϕ(<br />
t)<br />
= −ϕ<br />
ω cos( ωt)<br />
= −ω<br />
ϕ(<br />
t)<br />
2 D<br />
ω 2<br />
mr<br />
2π<br />
T =<br />
ω<br />
2π<br />
=<br />
mr<br />
D<br />
0<br />
2<br />
2<br />
⇐ Bewegungsgleichung<br />
Versuch:<br />
M 0,<br />
25N<br />
⋅ 0,<br />
3m<br />
D = =<br />
≈ 0,<br />
025<br />
ϕ π ⋅ rad<br />
Nm<br />
rad<br />
2 2<br />
0,<br />
4kg<br />
⋅ 0,<br />
1m<br />
⋅ 40s<br />
T = 2π ≈ 10s<br />
T im Experiment = 6s<br />
2<br />
kg ⋅ m<br />
m<br />
2<br />
r<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 33 - Thon<br />
m<br />
2
:<br />
Analogie Federpendel<br />
F=-kx<br />
2<br />
x<br />
E pot = k<br />
x<br />
1 2<br />
Ekin = mv<br />
2<br />
x(<br />
t)<br />
= Acosωt<br />
ω =<br />
k<br />
m<br />
2.9. Mechanik des starren Körpers<br />
2.9.1. Kinematik des starren Körpers<br />
System von MP mit konst. Abstände!<br />
momentaner Drehpunkt<br />
Drehpendel:<br />
M=-Dϕ<br />
= D =<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 34 - Thon<br />
E pot<br />
2<br />
ϕ<br />
2<br />
1 2<br />
Ekin = Jω<br />
2<br />
ϕ t)<br />
= ϕ cosωt<br />
( 0<br />
ω =<br />
Sehr nützliche Idealisierung<br />
Allg. Bewegung des starren Körpers setzt sich zusammen aus Translation + Rotation<br />
rot<br />
D<br />
J<br />
trans
B<br />
2.9.2. Kräftewirkung am starren Körper<br />
Starrer Körper: innere Kräfte unwirksam1<br />
Zahl der Freiheitsgrade<br />
N MP: 3N<br />
Starrer Körper 3 (transl) + 6 (rot) = 6<br />
Ursachen der Rotation: Kräftepaar F F′<br />
¥<br />
F ′<br />
A<br />
Zweikräfte:<br />
¦<br />
r<br />
Resultierende Kraft R F<br />
¡<br />
¤<br />
F<br />
A<br />
F<br />
Angriffspunkt P kann entlang Wirkungslinie AB<br />
verschoben werden<br />
kann entlang Wirkungslinie (WL) verschoben werden<br />
¢<br />
¢<br />
¢<br />
Falls F2<br />
= −F1<br />
= −F<br />
aber verschiedene parallele WL, dann erzeugt dieses Kräftepaar<br />
£<br />
£<br />
£<br />
£<br />
Drehmoment M = r − r ) × F<br />
( 1 2<br />
B<br />
A<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 35 - Thon<br />
¨<br />
F2<br />
§<br />
F1<br />
©<br />
FR
¥<br />
Kräftepaar kann innerhalb des starren Körpers verschoben werden ohne Änderung von M<br />
¥<br />
Betrag von M :<br />
M = sF<br />
2.9.3. Statik: Wann starrer Körper in Ruhe?<br />
1.<br />
¡ 2. M i = 0<br />
¢<br />
F = 0 (Fi = äußere Kraft)<br />
Starre Kräfte im schwere Feld<br />
SP ¨<br />
i<br />
( r 2 r§<br />
§ − 1<br />
2<br />
(Mi = äußeres Drehmoment)<br />
¨ = 0<br />
im SP unterstützt<br />
In jeder Stellung in Ruhe => indifferentes Gleichgewicht<br />
r ¥<br />
1<br />
r ¦<br />
2<br />
F ¤<br />
3<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 36 - Thon<br />
F £<br />
)<br />
S
Potentialkurve:<br />
1 2<br />
Erot = Jω<br />
2<br />
J = mr<br />
J<br />
J<br />
p<br />
p<br />
=<br />
=<br />
Vol<br />
¡<br />
Vol<br />
¡<br />
2.9.4. Trägheitsmoment starrer Körper<br />
2<br />
r<br />
2<br />
dm<br />
.<br />
ϕ(<br />
r ) r<br />
( MP)<br />
2<br />
Epot<br />
Drehachse<br />
r<br />
dV<br />
dm<br />
P über SP<br />
P unter SP<br />
0<br />
Zylinder um Symmetrieachse gedreht<br />
stabiles Gleichgewicht<br />
indifferentes Gleichgewicht<br />
labiles Gleichgewicht<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 37 - Thon<br />
¨
Zylinder Höhe h Radius R<br />
Dünnwand Zylinder mit dr hat:<br />
2<br />
dJ − dmr mit dm = ϕ ⋅ dr ⋅ r ⋅ dϕ<br />
⋅ dz<br />
J<br />
h<br />
= ϕ<br />
2π<br />
R<br />
= z 0 ϕ = 0 r=<br />
0<br />
3<br />
dzr dϕdr<br />
= ϕ<br />
Mit M = Formelfehlt<br />
gilt<br />
h<br />
[ z]<br />
[ ϕ]<br />
dV £ ¢<br />
0<br />
r<br />
¨<br />
2<br />
¡<br />
π<br />
0<br />
¨©<br />
§<br />
R<br />
4<br />
r<br />
4<br />
¥<br />
¦<br />
R<br />
0<br />
¤<br />
1<br />
JVollzyl<br />
. = MR<br />
2<br />
2<br />
R<br />
= ϕh2π<br />
4<br />
1 2 2<br />
a<br />
J Hohlzylinder<br />
= M HZ ( Ri<br />
+ R<br />
2<br />
<strong>Skript</strong> 1 <strong>Physik</strong> 1 - 38 - Thon<br />
4<br />
Ri<br />
RA<br />
)

