Grundlagen der Automatisierungstechnik Teil 3: Regelungen
Grundlagen der Automatisierungstechnik Teil 3: Regelungen
Grundlagen der Automatisierungstechnik Teil 3: Regelungen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Automatisierungstechnik</strong> 12<br />
<strong>Teil</strong> 1: Steuerungstechnik<br />
2<br />
⎧d<br />
f ( t)<br />
⎫ 2<br />
( 1)<br />
L ⎨ = ( ) − ( −0)<br />
− ( −0)<br />
2 ⎬ s f s sf f<br />
⎩ dt ⎭<br />
f(-0) ist <strong>der</strong> linksseitige Anfangswert <strong>der</strong> Funktion im Zeitbereich<br />
Die linksseitigen Grenzwerte lassen sich oft aus <strong>der</strong> Vorgeschichte des betrachteten Prozesses<br />
ableiten.<br />
Integration<br />
1<br />
{ f ( τ ) dτ}<br />
f ( s)<br />
∫<br />
L =<br />
s<br />
Aus den Regeln für Differentiation und Integration wird ersichtlich, dass die Integral- bzw.<br />
Differentialgleichungen im Zeitbereich in algebraische Gleichungen im Bildbereich<br />
übergehen.<br />
Verschiebungssatz<br />
{ f t − T } = exp( sT ) f ( s)<br />
( 1<br />
1<br />
L −<br />
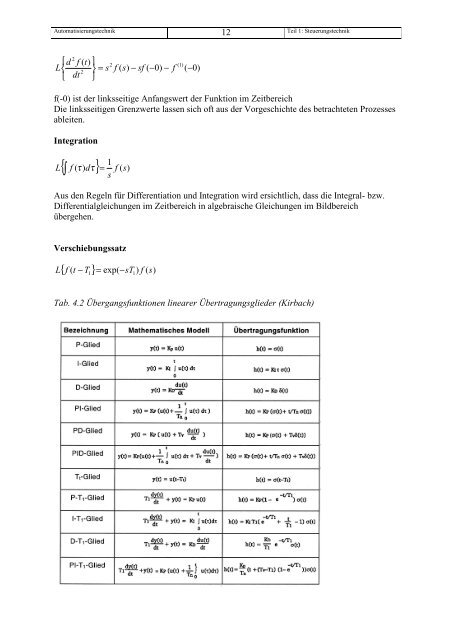
Tab. 4.2 Übergangsfunktionen linearer Übertragungsglie<strong>der</strong> (Kirbach)