PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
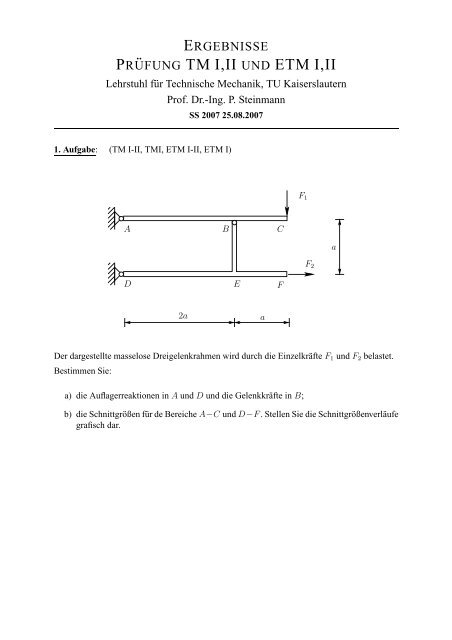
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
Prof. Dr.-Ing. P. Steinmann<br />
SS 2007 25.08.2007<br />
1. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong>I, E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> I)<br />
A B C<br />
D E F<br />
2a<br />
a<br />
F1<br />
F2<br />
000000000<br />
111111111<br />
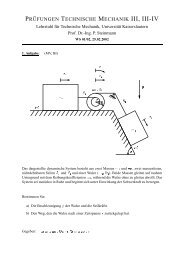
Der dargestellte masselose Dreigelenkrahmen wird durch die Einzelkräfte F1 und F2 belastet.<br />
Bestimmen Sie:<br />
a) die Auflagerreaktionen in A und D und die Gelenkkräfte in B;<br />
b) die Schnittgrößen <strong>für</strong> de Bereiche A−C und D−F . Stellen Sie die Schnittgrößenverläufe<br />
grafisch dar.<br />
a
a) Ax = −3F1, Ay = −0.5F1, Bx = 3F1, By = 1.5F1,<br />
b)<br />
Dx = 3F1 − F2, Dy = 1.5F1<br />
Bereich A-B:<br />
AH<br />
AV<br />
Bereich D-E:<br />
DH<br />
DV<br />
x<br />
x<br />
M<br />
Q N<br />
−0.5F1<br />
M<br />
Q N<br />
F2 − 3F1<br />
1.5F1<br />
N = 3F1<br />
Q = −0.5F1<br />
M = −0.5F1x<br />
3F1<br />
Bereich C-B:<br />
N<br />
M Q<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
N = F2 − 3F1<br />
Q = 1.5F1<br />
M = 1.5F1x<br />
−F1a<br />
x<br />
Bereich F-E:<br />
M Q<br />
N<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
x<br />
3F1a<br />
000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111000000000000000000<br />
111111111111111111<br />
F1<br />
F1<br />
F2<br />
F2<br />
N = 0<br />
Q = F1<br />
M = −F1x<br />
N = F2<br />
Q = 0<br />
M = 0
2. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong> I, E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> I)<br />
2a<br />
y<br />
α<br />
a<br />
2<br />
a<br />
2<br />
e<br />
µ µ<br />
x<br />
a<br />
2<br />
a<br />
2<br />
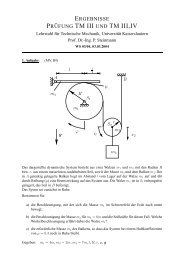
Eine homogene, u-förmige Scheibe konstanter Dicke d aus Stahl (Dichte ρ) wird, wie dargestellt,<br />
exzentrisch über ein Seil, zwei Umlenkrollen und das Gewicht F gegen zwei geneigte<br />
Ebenen gedrückt. Der Reibungskoeffizient zwischen der Scheibe und den Ebenen sei µ. Das<br />
Seil läuft reibungsfrei über die Rollen. Bestimmen Sie<br />
a) die Lage des Scheibenschwerpunktes im angegebenen Koordinatensystem!<br />
α<br />
b) das Maximum der Gewichtskraft F so, dass das System in der angegebenen Gleichgewichtslage<br />
verbleibt!<br />
Gegeben: ρ = 7, 8 g cm −3 , µ = 1, 2 , α = 45 ◦<br />
a = 10 cm , d = 10 mm , g = 9, 81 m s −2 , e = a/4<br />
a) xS = a, yS ≈ 1, 554 a<br />
b) Fmax ≈ 1, 56 G ≈ 37, 96 N<br />
g<br />
F
3. Aufgabe: (<strong>TM</strong> I)<br />
B<br />
A<br />
00000<br />
11111<br />
000000000000<br />
111111111111<br />
00000<br />
11111 00000<br />
11111 00000<br />
11111 00000 11111 0000 1111 000 111 00 11<br />
000 111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000 11111 0000 1111 000 111 00 11<br />
00 11 000 111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000 11111 0000 1111 000 111<br />
00 11 000 111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000<br />
11111 00000 11111<br />
6a<br />
C<br />
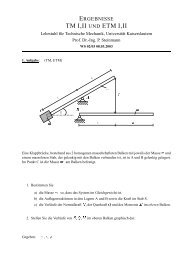
Der dargestellte Hallenträger besteht aus drei masselosen, starren Balken, die in den Punkten B<br />
und D gelenkig miteinander verbunden sind. Der Hallenträger ist in A fest eingespannt und in<br />
E gelenkig gelagert und wird durch die Streckenlasten s und w belastet.<br />
Berechnen Sie mit dem Prinzip der virtuellen Verschiebungen<br />
a) das Einpannmoment MA im linken Auflager A;<br />
b) das Biegemoment MC im Punkt C des Dachträgers;<br />
c) die vertikale Auflagerkraft Av im linken Auflager A.<br />
Gegeben: s, w, a<br />
Anmerkung: Sämtliche Polpläne, Verschiebungsbilder sowie kinematischen Beziehungen sind<br />
anzugeben.<br />
Eine Lösung der Aufgabe mit Gleichgewichtsbedingungen wird nicht bewertet.<br />
a) MA = 4.5wa 2<br />
b) MC = 18sa 2 + 1.5wa 2<br />
c) Av = 6sa<br />
6a<br />
D<br />
E<br />
s<br />
w<br />
a<br />
3a
4. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong> <strong>II</strong>, E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> <strong>II</strong>)<br />
l<br />
2<br />
l<br />
2<br />
ϑ(x)<br />
T<br />
①<br />
EA1<br />
x<br />
EA2<br />
α<br />
masselos, starr<br />
Ein starrer masseloser Balken ist wie abgebildet durch eine Festlager und zwei Stäbe gelagert.<br />
Der Stab ① erfährt eine lineare Erwärmung ϑ(x).<br />
a) Stellen Sie die Funktion der Temperaturänderung ϑ(x) des Stabes ① in Abhängigkeit der<br />
gegebenen Koordinate x auf.<br />
b) Geben Sie das Verhältnis der Längenänderungen der beiden Stäbe an, wenn der Balken<br />
aus der dargestellten (spannungsfreien) Lage bewegt wird.<br />
c) Berechnen Sie die Stabkräfte und die Auflagerkraft im Punkt A bei einer Erwärmung des<br />
Stabes ① um ϑ(x).<br />
d) Geben Sie <strong>für</strong> die beiden Grenzfälle EA2 = 0 und EA2 = ∞ die Stabk¨rafte und die<br />
Längenänderung des Stabes ① an.<br />
Gegeben: T, αT, EA1, EA2, l, α = 45 ◦<br />
②<br />
A
a) ϑ(x) = −T<br />
l<br />
b) ∆l1 = 2∆l2<br />
x + T<br />
c) N1 = − αT · T · E · A1 · A2<br />
2(A2 + 2A1)<br />
N2 = αT · T · E · A1 · A2<br />
(A2 + 2A1)<br />
A = − 1<br />
2 · αT · T · E · A1 · A2<br />
2(A2 + 2A1)<br />
d) Grenfälle<br />
1. N2 = 0 =⇒ N1 = 0 ∆l1 = αT · l · T<br />
2<br />
2. ∆l2 = N2<br />
EA2<br />
· l<br />
2<br />
= 0<br />
N1 = − αT · T · E · A1<br />
2<br />
N2 = αT · T · E · A1
5. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong> <strong>II</strong>)<br />
y<br />
Q<br />
z<br />
l<br />
t<br />
Bestimmen Sie <strong>für</strong> den dargestellten Querschnitt eines dünnwandigen Profils mit konstanter<br />
Wanddicke t<br />
a) den Schwerpunkt S,<br />
b) das Flächenträgheitsmoment Iyy bezüglich der y-Achse. Verwenden Sie hier<strong>für</strong> ein neues<br />
Koordinatensystem (y ∗ , z ∗ ) dessen Ursprung im Schwerpunkt S liegt.<br />
c) die Spannungsverteilung aus Querkraft längs der Profillinie. Nehmen Sie hierzu an, dass<br />
das Flächenträgheitsmoment Iyy = I ist. D.h. das in Aufgabenteil b) berechnete Flächenträgheitsmoment<br />
braucht hier nicht explizit eingesetzt zu werden.<br />
Gegeben: Q, l, l = 2a, t<br />
a) ¯zS = −a : ¯yS = −1.18l<br />
b) Iyy = 1, 16 l 3 t<br />
c) τ = QS<br />
It ; τ1 =<br />
Q l<br />
2 s1<br />
I<br />
; τ2 = Ql2<br />
I +<br />
<br />
1<br />
Q<br />
l<br />
l − s2<br />
2<br />
2I<br />
2<br />
a<br />
a
6. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong><strong>II</strong>, E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> <strong>II</strong> )<br />
A<br />
2a<br />
B<br />
Das abgebildete massenlose Tragwerk besteht aus einem Balken, einem biegesteif angeschlossenen<br />
Bogenträger und einem in C gelenkig verbundenen Stab. Der Balken und der Bogenträger<br />
besitzen die Biegesteifigkeit EI, der Stab hat die Dehnsteifigkeit EA. Der Balken ist in Punkt<br />
A fest eingespannt, während der Stab in D fest gelagert ist. Das System ist im Punkt B mit der<br />
vertikalen Kraft F belastet.<br />
Bestimmen Sie:<br />
a) die Lagerkraft in D und die Abesenkung des Punktes C;<br />
b) <strong>für</strong> den Sonderfall eines dehnstarren Stabes (d.h. EA → ∞) die Lagerkraft in D und die<br />
Absenkung des Punktes C;<br />
c) <strong>für</strong> den Sonderfall eines sehr weichen Stabes (d.h. EA → 0) die Lagerreaktionen in A<br />
und die Absenkung des Punktes C.<br />
Gegeben: a, F , EA, EI.<br />
Anmerkung: Energieanteile infolge Querkraft können vernachlässigt werden. Im Bogenträger<br />
sind nur Energieanteile infolge des Biegemomentes zu berücksichtigen.<br />
Hinweis:<br />
<br />
2 1 1<br />
cos xdx = x + sin 2x<br />
2 4<br />
F<br />
a<br />
D<br />
C<br />
a
a) Dy =<br />
wc =<br />
<br />
a a3<br />
+<br />
EA EI<br />
<br />
a a3<br />
+<br />
EA EI<br />
14a 3<br />
3EI F<br />
<br />
3 26<br />
π − 2 +<br />
4 3<br />
8a 3<br />
3EI Fa<br />
<br />
3 20<br />
π − 2 +<br />
4 3<br />
<br />
<br />
EA<br />
14F<br />
b) Dy = ; wC = 0<br />
3 26<br />
3 π − 2 +<br />
4 3<br />
c) Ax = 0; Ay = F; MA = 2aF<br />
vC = 14Fa3<br />
3EI
7. Aufgabe: (E<strong>TM</strong> I)<br />
l<br />
A<br />
C<br />
l l<br />
Die abgebildete dreieckige Scheibe ist im Punkt A horizontal verschieblich gelagert und im<br />
Punkt B mit einer Kurbel verbunden. Die Kurbel hat die Länge r und bewegt sich mit der<br />
konstanten Winkelgeschwindigkeit ω um den Punkt D.<br />
Bestimmen Sie <strong>für</strong> die dargestellte Lage:<br />
a) Die Richtung der Geschwindigkeit im Punkt B (zeichnerisch).<br />
b) Die Richtungsvektoren rAB und rBC sowie den Geschwindigkeitsvektor vB im gegebenen<br />
Koordinatensystem.<br />
c) Die Winkelgeschwindigkeit ωs der Scheibe sowie die Geschwindigkeitsvektoren in den<br />
Punkten A und C im gegebenen Koordinatensystem.<br />
d) Die Lage des Momentanpols der Scheibe im gegebenen Koordinatensystem.<br />
e) Den Beschleunigungsvektor im Punkt A und die Winkelbeschleunigung ˙ωs der Scheibe<br />
im gegebenen Koordinatensystem.<br />
Gegeben: l, r, α = 45 ◦ und ω = √ 2<br />
B<br />
z<br />
y<br />
r<br />
α<br />
ω<br />
D<br />
x
a)<br />
l<br />
A<br />
C<br />
l l<br />
⎡ ⎤<br />
2 l<br />
⎡ ⎤<br />
−l<br />
⎡ ⎤<br />
r<br />
⎢<br />
b) rAB = ⎣<br />
⎥<br />
0 ⎦<br />
⎢ ⎥<br />
rBC = ⎣ l ⎦<br />
⎢ ⎥<br />
vB = ⎣ r ⎦<br />
c) ωS =<br />
d) Π =<br />
⎡<br />
⎢<br />
⎣<br />
0<br />
0<br />
r<br />
2l<br />
0<br />
⎤<br />
⎥<br />
⎦<br />
⎡ ⎤<br />
−2l<br />
⎢ ⎥<br />
⎣ 2l ⎦<br />
⎡<br />
⎢<br />
e) aA = ⎢<br />
⎣<br />
0<br />
r · √ 2 + r2<br />
2l<br />
0<br />
0<br />
⎤<br />
⎥<br />
⎦<br />
0<br />
B<br />
⎡ ⎤<br />
r<br />
⎡ ⎤<br />
r/2<br />
⎢ ⎥<br />
vA = ⎣ 0 ⎦<br />
⎢ ⎥<br />
vC = ⎣ r/2 ⎦<br />
0<br />
ωS ˙ =<br />
⎡<br />
⎢<br />
⎣<br />
0<br />
0<br />
− r · √ 2<br />
2l<br />
⎤<br />
⎥<br />
⎦<br />
z<br />
y<br />
r<br />
0<br />
α<br />
0<br />
vB<br />
ω<br />
D<br />
x
8. Aufgabe: (E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> <strong>II</strong>)<br />
x<br />
x3<br />
ψ<br />
g<br />
m3<br />
2R<br />
ϕ<br />
R K2<br />
Zwei Massen m2 und m3 sind durch ein Seil, das über eine masselose Rolle K1 geschlungen<br />
ist, miteinander verbunden. Die Rolle K1 ist durch ein zweites Seil, das über die masselose<br />
Scheibe K2 geschlungen ist, mit der Masse m1 verbunden.<br />
Bestimmen Sie:<br />
a) die Bewegungsgleichungen <strong>für</strong> alle Teilsysteme;<br />
b) <strong>für</strong> den Fall m1 = m, m2 = 2m und m3 = 4m die Winkelbeschleunigung und die<br />
Schwerpunktbeschleunigung der Rolle K1;<br />
c) <strong>für</strong> den Fall m1 = 0 die Schwerpunktbeschleunigung und Winkelbeschleunigung der<br />
Rolle K1.<br />
Gegeben: m1, m2, m3, R, g<br />
Anmerkung: Verwenden Sie die angegebenen Koordinaten.<br />
K1<br />
m1<br />
m2<br />
x1<br />
x2
a)<br />
↑ : −m1¨x1 + S1 − m1g = 0<br />
A : S1 R − S4 R = 0<br />
↑ : S4 − S2 − S3 = 0<br />
B : S2 2R − S3 2R = 0<br />
↑ : −m2¨x2 + S2 − m2g = 0<br />
↑ : −m3¨x3 − S3 + m3g = 0<br />
b)<br />
<br />
2m2 1 +<br />
¨x1 =<br />
(m3<br />
<br />
− m2)<br />
(m2 + m3)<br />
<br />
2m2 1 + (m3<br />
<br />
− m2)<br />
(m2 + m3)<br />
− m1<br />
+ m1<br />
<strong>für</strong> m1 = m, m2 = 2m, m3 = 4m ¨x1 = 13<br />
19 g<br />
c) ¨x1 = g, ¨ϕ = 0<br />
g